Изобретение относится к блокам модулированных субдискретизированных цифровых фильтров, а также к способам и системам для конструирования этих блоков фильтров. В частности, он предусматривает новый способ конструирования и устройство для блока косинусоидально или комплексно-экспоненциально модулированных фильтров с малым запаздыванием и близкой к совершенной реконструкцией, оптимизированного для подавления эффекта наложения спектров, возникающего в результате модификаций спектральных коэффициентов, или сигналов поддиапазонов. Кроме того, дается специфическая конструкция 64-канального блока фильтров, использующего фильтр-прототип длиной 640 коэффициентов и системное запаздывание на 319 дискретных значений.
Идеи данного документа применимы к цифровым эквалайзерам, как описано, например, в документе "An Efficient 20 Band Digital Audio Equalizer" A. J. S. Ferreira, J. M. N. Viera, AES preprint 98th Сonvention 1995 February 25-28 Paris, N.Y., USA; адаптивным фильтрам, как описано, например, в документе «Adaptive Filtering in Subbands with Critical Sampling: Analysis, Experiments, and Application to Acoustic Echo Cancellation», A. Gilloire, M. Vetterii, IEEE Transactions on Signal Processing, vol.40, no.8, August, 1992; многополосным компандерам и к системам кодирования звука, использующим способы высокочастотной реконструкции (HFR), или системам кодирования звука, которые применяют т.н. способы параметрического стереофонического звука. В двух последних примерах блок цифровых фильтров используется для адаптивной корректировки огибающей спектра звукового сигнала. Иллюстративными системами HFR являются: система репликации спектральных полос (SBR), описанная, например, в документе WO 98/57436, и параметрическая стереофоническая система, описанная, например, в патенте ЕР 1410687.
Во всем данном описании, включая формулу изобретения, выражения «сигналы поддиапазонов» или «дискретные значения поддиапазонов» обозначают выходной сигнал, или выходные сигналы, или дискретный выходной сигнал, или дискретные выходные сигналы из анализирующей части блока цифровых фильтров, или выходной сигнал из прямого преобразования, т.е. преобразования, оперирующего с данными во временной области, системы на основе преобразования. Примерами выходных сигналов таких прямых преобразований являются коэффициенты в частотной области из обрабатываемого методом окна цифрового преобразования Фурье (DFT) или дискретные выходные значения этапа модифицированного дискретного косинусного преобразования (MDCT).
Во всем данном описании, включая формулу изобретения, выражение «эффект наложения спектров» означает нелинейное искажение, возникающее в результате прореживания и интерполяции, возможно, в сочетании с модификацией (например, с затуханием или квантованием) дискретных значений поддиапазонов в блоке субдисретизированных цифровых фильтров.
Блок цифровых фильтров представляет собой совокупность двух или большего количества параллельных цифровых фильтров. Блок анализирующих фильтров разделяет поступающий сигнал на некоторое количество отдельных сигналов, называемых сигналами поддиапазонов, или спектральными коэффициентами. Блок фильтров является критически дискретизированным, или максимально прореженным, тогда, когда общее количество дискретных значений поддиапазонов в единицу времени является таким же, как и для входного сигнала. Так называемый блок синтезирующих фильтров комбинирует сигналы поддиапазонов в выходной сигнал. Популярным типом критически дискретизированных блоков фильтров является блок косинусоидально модулированных фильтров, где фильтры получаются посредством косинусоидальной модуляции фильтра пропускания нижних частот, т.н. фильтра-прототипа. Блок косинусоидально модулированных фильтров обеспечивает эффективные реализации и часто используется в системах кодирования естественных звуков. Подробности см. по ссылке: "Introduction to Perceptual Coding", K.Brandenburg, AES, Collected Papers on Digital Audio Bitrate Reduction, 1996.
Общая трудность при конструировании блоков фильтров заключается в том, что любая попытка изменения дискретных значений поддиапазонов, или спектральных коэффициентов, например, путем применения выравнивающей кривой усиления или путем квантования дискретных значений, как правило, приводит к появлению в выходном сигнале артефактов наложения спектров. Поэтому являются желательными конструкции блоков фильтров, которые уменьшают указанные артефакты даже тогда, когда дискретные значения поддиапазонов подвергаются жестким модификациям.
Возможным подходом является использование блоков передискретизированных, т.е. не критически дискретизированных, фильтров. Примером такого блока передискретизированных фильтров является класс блоков комплексно-экспоненциально модулированных фильтров, где к действительной части блока косинусоидально модулированных фильтров добавляется мнимая синусоидально модулированная часть. Подобный блок комплексно-экспоненциально модулированных фильтров описан в патенте ЕР 1374399, который ссылкой включается в настоящее описание.
Одним из свойств блоков комплексно-экспоненциально модулированных фильтров является то, что они не содержат главных паразитных низкочастотных составляющих, присутствующих в блоках косинусоидально модулированных фильтров. Как следствие, такие блоки фильтров, как правило, менее склонны к возникновению артефактов, индуцируемых модификацией дискретных значений поддиапазонов. Тем не менее, остаются другие паразитные низкочастотные составляющие, и для минимизации таких искажений, как эффект наложения спектров, возникающий в результате модификаций сигналов поддиацазоцов, необходимо применение сложных способов конструирования фильтра-прототипа указанного блока комплексно-экспоненциально модулированных фильтров. Как правило, остаточные паразитные низкочастотные составляющие менее значительны, чем главные паразитные низкочастотные составляющие.
Еще одним свойством блоков фильтров является величина запаздывания, которому сигнал подвергается при прохождении через указанные блоки фильтров. В частности, для приложений в реальном времени, таких как потоки звуковых и видеоданных, запаздывание системы должно быть небольшим. Возможный подход к получению блока фильтров, обладающего малым общим системным запаздыванием, т.е. низким запаздыванием, или временем ожидания, сигнала, проходящего через блок анализирующих фильтров, а затем через блок синтезирующих фильтров, заключается в использовании коротких симметричных фильтров-прототипов. Как правило, использование коротких симметричных фильтров-прототипов приводит к относительно слабым характеристикам разделения частотных полос и к большим областям перекрывания частот между смежными поддиапазонами. Как следствие, короткие фильтры-прототипы не позволяют создать конструкцию блока фильтров, который адекватно подавлял бы эффект наложения спектров при модификации дискретных значений поддиапазонов, поэтому необходимы другие подходы к конструированию блоков фильтров с малым запаздыванием.
В связи с этим, является необходимым создание способа конструирования блоков фильтров, которые объединяли бы определенное количество полезных свойств. Этими свойствами являются: высокий уровень невосприимчивости к искажениям, таким как эффект наложения спектров, сигнала, подвергаемого модификациям сигналов поддиапазонов, малое запаздывание или время ожидания сигнала, проходящего через блоки анализирующих и синтезирующих фильтров, а также свойство хорошего приближения совершенной реконструкции. Иными словами, требуется создать способ конструирования блоков фильтров, которые генерировали бы низкий уровень ошибок. Блоки субдискретизированных фильтров, как правило, генерируют ошибки двух типов: линейное искажение из составляющей полосы пропускания, которое затем может быть разделено на амплитудную и фазовую ошибки, и нелинейное искажение, возникающее как следствие составляющих эффекта наложения спектров. Даже если свойство «хорошего приближения» PR (совершенной реконструкции) будет поддерживать все эти ошибки на низком уровне, с точки зрения восприятия, может быть полезным придание большего значения уменьшению искажений, вызванных эффектом наложения спектров.
Кроме того, требуется создать фильтр-прототип, который можно было бы использовать для конструирования блока анализирующих и/или синтезирующих фильтров, проявляющего указанные свойства. Дополнительным полезным свойством блока фильтров является проявление им близкого к постоянному группового запаздывания, минимизирующее артефакты, связанные с дисперсией выходного сигнала.
Настоящий документ показывает, что искажения, возникающие в результате модификаций сигналов поддиапазонов, могут быть существенно уменьшены путем применения способа конструирования блока фильтров, называемого способом усовершенствованной минимизации паразитных низкочастотных составляющих (IATM), для оптимизации симметричных и асимметричных фильтров-прототипов.
Настоящий документ указывает, что концепция конструкций псевдо-QMF (квадратурных зеркальных фильтров), т.е. конструкций блоков фильтров с близкой к совершенной реконструкцией, может быть распространена на системы блоков фильтров с малым запаздыванием, использующие асимметричные фильтры-прототипы. Таким образом, возможно конструирование блоков фильтров с близкой к совершенной реконструкцией, низким системным запаздыванием, малой восприимчивостью к эффекту наложения спектров и/или низким уровнем ошибок полосы пропускания, включая дисперсию фазы. В зависимости от конкретных потребностей, может изменяться акцентирование внимания, уделяемого тому или иному свойству блока фильтров. Таким образом, способ конструирования блока фильтров согласно настоящему изобретению снижает существующие в настоящее время ограничения блоков фильтров с близкой к совершенной реконструкцией, используемых в системе выравнивания или другой системе, модифицирующей спектральные коэффициенты.
Конструирование блока комплексно-экспоненциально модулированных фильтров с малым запаздыванием согласно настоящему документу может включать следующие этапы:
- конструирование асимметричного фильтра-прототипа пропускания нижних частот с частотой отсечки π/2М, оптимизированного для требуемого отбрасывания эффекта наложения спектров и ошибок полосы пропускания, а также оптимизированного для обеспечения системного запаздывания D, где М - количество каналов блока фильтров; и
- конструирование М-канального блока фильтров путем комплексно-экспоненциальной модуляции оптимизированного фильтра-прототипа.
Кроме того, функционирование указанного блока комплексно-экспоненциально модулированных фильтров с малым запаздыванием согласно настоящему документу может включать этапы:
- фильтрации действительнозначного сигнала во временной области через анализирующую часть блока фильтров;
- модификации комплекснозначных сигналов поддиапазонов, например, в соответстии с требуемыми, возможно, меняющимися во времени настройками эквалайзера;
- фильтрации модифицированных комплекснозначных дискретных значений поддиапазонов через синтетическую часть блока фильтров;
- вычисления действительной части комплекснозначного выходного сигнала во временной области, полученного из синтезирующей части блока фильтров.
Помимо представления нового способа конструирования фильтра, настоящий документ описывает специфическую конструкцию 64-канального блока фильтров, имеющего фильтр-прототип длиной 640 коэффициентов и системное запаздывание на 319 дискретных значений.
Идеи настоящего документа, в особенности предложенный блок фильтров и блоки фильтров, конструируемые согласно предложенному способу конструирования, могут использоваться в различных приложениях. Этими приложениями являются: усовершенствование цифровых эквалайзеров различного типа, адаптивных фильтров, многополосных компандеров и блоков адаптивных фильтров с коррекцией огибающей, используемых в HFR или параметрических стереофонических системах.
Согласно первой особенности, описан способ определения N коэффициентов асимметричного фильтра-прототипа р0 для его использования при построении М-канального блока субдискретизированных анализирующих/синтезирующих фильтров с малым запаздыванием. Блок анализирующих/синтезирующих фильтров может содержать М анализирующих фильтров hk и М синтезирующих фильтров fk, где k принимает значения от 0 до М-1 и, как правило, М больше 1. Блок анализирующих/синтезирующих фильтров имеет результирующую передаточную функцию, которая, как правило, связана с коэффициентами анализирующих и синтезирующих фильтров, а также с операциями прореживания и/или интерполяции.
Способ включает этап выбора целевой передаточной функции блока фильтров, включающей целевое запаздывание D. Как правило, выбирается целевое запаздывание D, которое меньше или равно N. Способ также включает этап определения сложной целевой функции etot, включающей член et, ошибки полосы пропускания и член ea ошибки эффекта наложения спектров. Член ошибки полосы пропускания связан с отклонением между передаточной функцией блока фильтров и целевой передаточной функцией, а член ea ошибки эффекта наложения спектров связан с ошибками, возникающими вследствие субдискретизации, т.е. прореживания и/или интерполяции блока фильтров. В следующем этапе способа определяется N коэффициентов асимметричного фильтра-прототипа р0, которые уменьшают значение сложной целевой функции etot.
Как правило, этап определения целевой функции ошибок etot и этап определения N коэффициентов асимметричного фильтра-прототипа итеративно повторяются до достижения минимума целевой функции ошибок etot. Иными словами, целевая функция etot определяется на основе заданного набора коэффициентов фильтра-прототипа, а скорректированный набор коэффициентов фильтра-прототипа генерируется путем уменьшения значения сложной целевой функции. Этот процесс повторяется до тех пор, пока дальнейшие уменьшения значения сложной целевой функции путем модификации коэффициентов фильтра-прототипа не станут невозможными. Это означает, что этап определения целевой функции ошибок etot может включать определение значения сложной целевой функции etot для заданных коэффициентов фильтра-прототипа р0, а этап определения N коэффициентов асимметричного фильтра-прототипа р0 может включать определение скорректированных коэффициентов фильтра-прототипа р0 на основе градиента сложной целевой функции etot, связанного с коэффициентами фильтра-прототипа р0.
Согласно следующей особенности, сложная целевая функция ошибок etot имеет вид:

где et - член ошибки полосы пропускания, ea - член ошибки эффекта наложения спектров, α - весовая константа, принимающая значения от 0 до 1. Член et ошибки полосы пропускания можно определить путем накопления квадратичного отклонения между передаточной функцией блока фильтров и целевой передаточной функцией для ряда частот. В частности, член et ошибки полосы пропускания можно вычислить как

где 
где Hk(z) и Fk(z) - соответственно, z-преобразования анализирующих и синтезирующих фильтров hk(n) и fk(n).
Член ea ошибки эффекта наложения спектров определяется путем накопления квадратичных абсолютных значений коэффициентов усиления паразитных низкочастотных составляющих для ряда частот. В частности, член ea ошибки эффекта наложения спектров вычисляется как

где 

где l-й коэффициент усиления паразитной низкочастотной составляющей определяется на единичной окружности при W=e-i2π/M, где Hk(z) и Fk(z) - соответственно, z-преобразования анализирующих и синтезирующих фильтров hk(n) и fk(n). Обозначение Al*(z) представляет z-преобразование комплексно-сопряженной последовательности al(n).
Согласно следующей особенности, этап определения значения сложной целевой функции etot может включать генерирование анализирующих фильтров hk(n) и синтезирующих фильтров fk(n) блока анализирующих/синтезирующих фильтров на основе фильтра-прототипа p0(n) c использованием косинусоидальной модуляции, синусоидальной модуляции или комплексно-экспоненциальной модуляции. В частности, анализирующие и синтезирующие фильтры можно определить с использованием косинусоидальной модуляции:

где n=0…N-1, для М анализирующих фильтров блока анализирующих фильтров; и

где n=0…N-1, для М синтезирующих фильтров блока синтезирующих фильтров.
Анализирующие и синтезирующие фильтры также можно определить с использованием комплексно-экспоненциальной модуляции:

где n=0…N-1 и А - произвольная постоянная, для М анализирующих фильтров блока анализирующих фильтров; и

где n=0…N-1, для М синтезирующих фильтров блока синтезирующих фильтров.
Согласно следующей особенности, этап определения значения сложной целевой функции etot может включать присвоение, по меньшей мере, одному из каналов блока фильтров нулевого значения. Это может достигаться путем применения нулевого коэффициента усиления к, по меньшей мере, одному анализирующему и/или синтезирующему фильтру, т.е. коэффициенты фильтра hk и/или fk могут приравниваться к нулю для, по меньшей мере, одного канала k. В одном из примеров может приравниваться к нулю заранее заданное количество низкочастотных каналов и/или заранее заданное количество высокочастотных каналов. Иными словами, к нулю могут приравниваться каналы блока низкочастотных фильтров от k=0 до k=Clow, где Clow больше нуля. В альтернативном варианте или в качестве дополнения, к нулю могут приравниваться каналы блока высокочастотных фильтров от k=Chigh до k=М-1, где Chigh меньше М-1.
В этом случае этап определения значения сложной целевой функции etot может включать генерирование с использованием комплексно-экспоненциальной модуляции анализирующих и синтезирующих фильтров для членов эффекта наложения спектров Clow и M-Clow и/или Chigh и М-Chigh. Этап также может включать генерирование анализирующих и синтезирующих фильтров для остальных членов эффекта наложения спектров с использованием косинусоидальной модуляции. Иными словами, процедура оптимизации может выполняться частично комплекснозначным способом, где члены ошибки эффекта наложения спектров, не содержащие главных членов эффекта наложения спектров, вычисляются с использованием действительнозначных фильтров, например фильтров, генерируемых с использованием косинусоидальной модуляции, а члены ошибки эффекта наложения спектров, которые несут главные члены эффекта наложения спектров в действительнозначной системе, модифицируются для комлекснозначной обработки, например, с использованием комплексно-экспоненциально модулированных фильтров.
Согласно следующей особенности, блок анализирующих фильтров может генерировать М сигналов поддиапазонов из входного сигнала, используя М анализирующих фильтров hk. Эти М сигналов поддиапазонов могут подвергаться прореживанию в М раз, давая прореженные сигналы поддиапазонов. Как правило, прореженные сигналы поддиапазонов модифицируются, например, с целью выравнивания или сжатия. Возможно, модифицированные прореженные сигналы поддиапазонов могут подвергаться повышающей дискретизации в М раз, и блок синтезирующих фильтров может с использованием М синтезирующих фильтров fk генерировать выходной сигнал из подвергнутых повышающей дискретизации прореженных сигналов поддиапазонов.
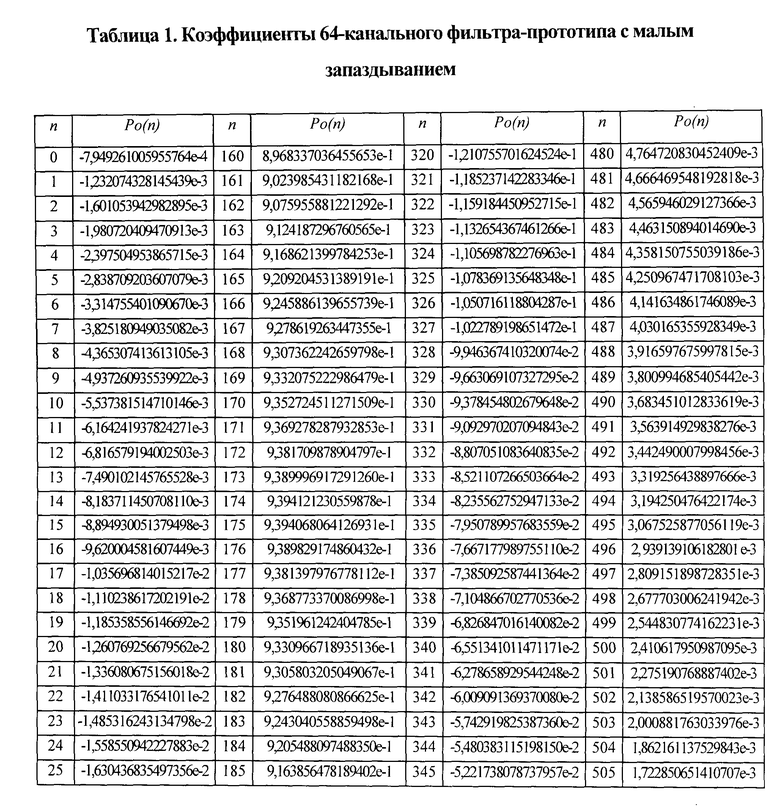
Согласно еще одной особенности, описан асимметричный фильтр-прототип р0(n), имеющий коэффициенты, выводимые из коэффициентов по таблице 1 посредством любой из следующих операций: округления, отбрасывания, масштабирования, субдискретизациии или передискретизации. Возможна любая комбинация операций округления, отбрасывания, масштабирования, субдискретизациии или передискретизации.
Операция округления коэффициентов фильтра может включать любую из следующих операций: округление до более чем 20 значащих цифр, более чем 19 значащих цифр, более чем 18 значащих цифр, более чем 17 значащих цифр, более чем 16 значащих цифр, более чем 15 значащих цифр, более чем 14 значащих цифр, более чем 13 значащих цифр, более чем 12 значащих цифр, более чем 11 значащих цифр, более чем 10 значащих цифр, более чем 9 значащих цифр, более чем 8 значащих цифр, более чем 7 значащих цифр, более чем 6 значащих цифр, более чем 5 значащих цифр, более чем 4 значащих цифр, более чем 3 значащих цифр, более чем 2 значащих цифр, более чем 1 значащей цифры, до 1 значащей цифры.
Операция отбрасывания коэффициентов фильтра может включать любую из следующих операций: отбрасывание до более чем 20 значащих цифр, более чем 19 значащих цифр, более чем 18 значащих цифр, более чем 17 значащих цифр, более чем 16 значащих цифр, более чем 15 значащих цифр, более чем 14 значащих цифр, более чем 13 значащих цифр, более чем 12 значащих цифр, более чем 11 значащих цифр, более чем 10 значащих цифр, более чем 9 значащих цифр, более чем 8 значащих цифр, более чем 7 значащих цифр, более чем 6 значащих цифр, более чем 5 значащих цифр, более чем 4 значащих цифр, более чем 3 значащих цифр, более чем 2 значащих цифр, более чем 1 значащей цифры, до 1 значащей цифры.
Операция масштабирования коэффициентов фильтра может включать пропорциональное увеличение или пропорциональное уменьшение коэффициентов фильтра. В частности, она может включать пропорционально увеличивающее и/или уменьшающее масштабирование на количество М каналов блока фильтров. Указанное пропорциональное увеличение и/или уменьшение может использоваться для сохранения входной энергии сигнала на входе в блок фильтров на выходе блока фильтров.
Операция субдискретизации может включать субдискретизацию на делитель, меньший или равный 2, меньший или равный 3, меньший или равный 4, меньший или равный 8, меньший или равный 16, меньший или равный 32, меньший или равный 64, меньший или равный 128, меньший или равный 256. Операция субдискретизации также может включать определение коэффициентов субдискретизированного фильтра как среднего значения смежных коэффициентов фильтра. В частности, среднее значение R смежных коэффициентов фильтра может определяться как коэффициент субдискретизированного фильтра, где R - коэффциент субдискретизации.
Операция передискретизации может включать передискретизацию на множитель, меньший или равный 2, меньший или равный 3, меньший или равный 4, меньший или равный 5, меньший или равный 6, меньший или равный 7, меньший или равный 8, меньший или равный 9, меньший или равный 10. Операция передискретизации также может включать определение коэффициентов передискретизированного фильтра как интерполяции между двумя смежными коэффициентами фильтра.
Согласно следующей особенности, описан блок фильтров, содержащий М фильтров. Фильтры этого блока фильтров основываются на асимметричных фильтрах-прототипах, описанных в настоящем документе, и/или асимметричных фильтрах-прототипах, определяемых посредством способов, описанных в настоящем документе. В частности, М фильтров могут представлять собой модулированные версии фильтра-прототипа, а модуляция может представлять собой косинусоидальную модуляцию, синусоидальную модуляцию и/или комплексно-экспоненциальную модуляцию.
Согласно другой особенности, описан способ генерирования прореженных сигналов поддиапазонов с низкой чувствительностью к эффекту наложения спектров, возникающему вследствие модификаций указанных сигналов поддиапазонов. Способ включает этапы определения анализирующих фильтров блока анализирующих/синтезирующих фильтров согласно способам, описанным в настоящем документе, фильтрации действительнозначного сигнала во временной области через указанные анализирующие фильтры для получения комплекснозначных сигналов поддиапазонов и прореживания указанных сигналов поддиапазонов. Кроме того, описан способ генерирования действительнозначного выходного сигнала из ряда комплекснозначных сигналов поддиапазонов с низкой чувствительностью к эффекту наложения спектров, возникающему вследствие модификаций указанных сигналов поддиапазонов. Способ включает этапы определения синтезирующих фильтров блока анализирующих/синтезирующих фильтров согласно способам, описанным в настоящем документе, интерполяции указанного ряда комплекснозначных сигналов поддиапазонов, фильтрации указанного ряда интерполированных сигналов поддиапазонов через указанные синтезирующие фильтры, генерирования комплекснозначного выходного сигнала во временной области как суммы сигналов, полученных в результате указанной фильтрации и взятия действительной части комплекснозначного выходного сигнала во временной области в качестве действительнозначного выходного сигнала.
Согласно другой особенности, описана система, которая функционирует, генерируя сигналы поддиапазонов из входного сигнала во временной области, где система включает блок анализирующих фильтров, который генерируется в соответствии со способами, описанными в настоящем документе, и/или основывается на фильтрах-прототипах, описанных в настоящем документе.
Следует отметить, что особенности способов и систем, описанных в настоящей заявке на патент, включая предпочтительные варианты их осуществления, могут использоваться по отдельности или в сочетании с другими особенностями способов и систем, раскрытых в данном документе. Кроме того, все особенности способов и систем, описанных в настоящей заявке на патент, могут произвольно комбинироваться. В частности, признаки формулы изобретения могут произвольным образом комбинироваться друг с другом.
Ниже настоящее изобретение будет описано при помощи иллюстративных примеров, не ограничивающих его объем, с отсылкой к сопроводительным графическим материалам, где:
Фиг.1 иллюстрирует анализирующую и синтезирующую секции блока цифровых фильтров;
Фиг.2 показывает стилизованные частотные характеристики для набора фильтров с целью иллюстрации неблагоприятного влияния модификации дискретных значений поддиапазонов в блоке косинусоидально модулированных, т.е. действительнозначных, фильтров;
Фиг.3 показывает блок-схему примера процедуры оптимизации;
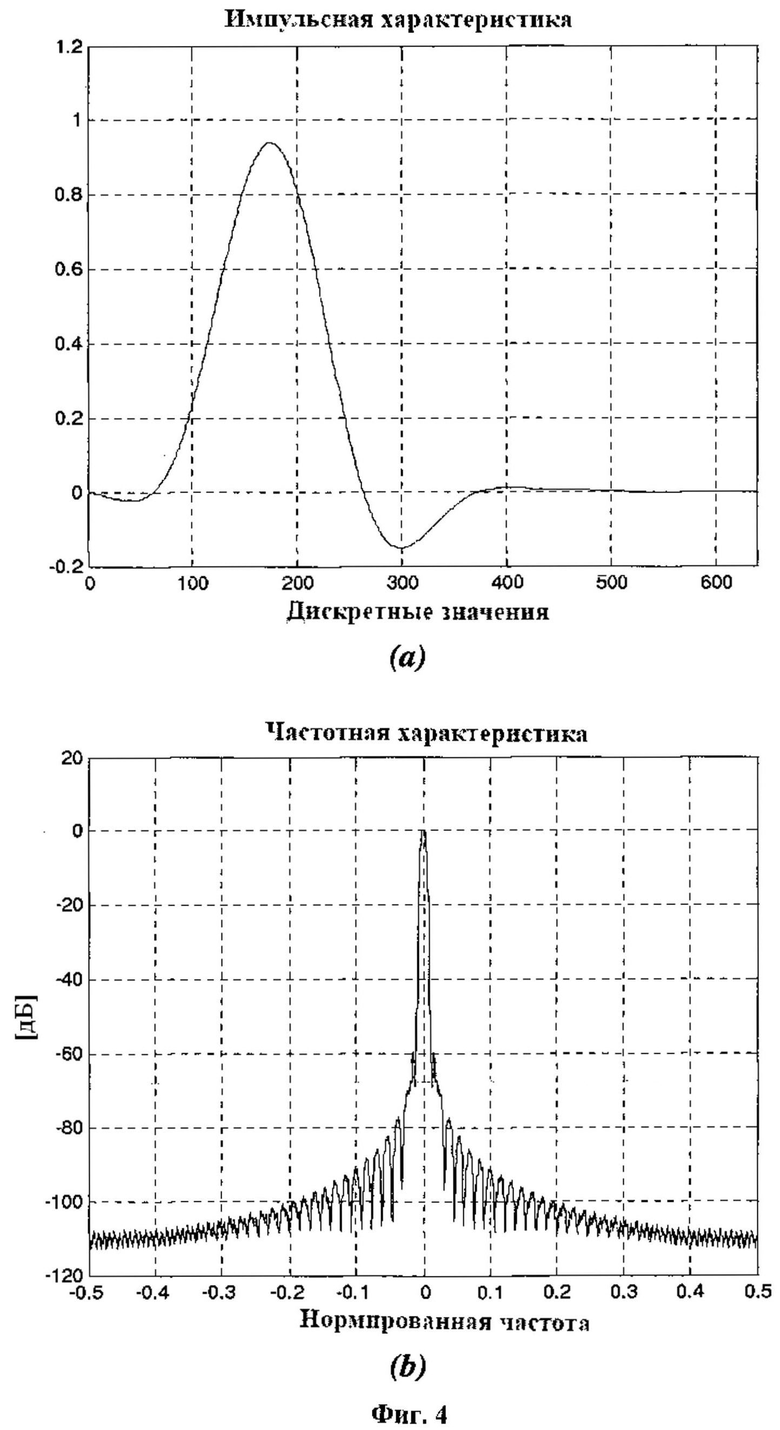
Фиг.4 показывает график временной области и частотную характеристику оптимизированного фильтра-прототипа для блока модулированных фильтров с малым запаздыванием, содержащего 64 канала и общее системное запаздывание на 319 дискретных значений; и
Фиг.5 иллюстрирует пример анализирующей и синтезирующей частей системы блока комплексно-экспоненциально модулированных фильтров с малым запаздыванием.
Следует понимать, что настоящие идеи применимы к ряду реализации, который включает блоки цифровых фильтров иные, чем упоминаемые в этом патенте в прямой форме. В частности, настоящие идеи могут быть применимы к другим способам конструирования блока фильтров на основе фильтра-прототипа.
Ниже определяется полная передаточная функция блока анализирующих/синтезирующих фильтров. Иными словами, описывается математическое представление прохождения сигнала через указанную систему блока фильтров. Блок цифровых фильтров представляет собой совокупность из М, где М больше или равно двум, параллельных цифровых фильтров, которые совместно используют общий входной сигнал или общий выходной сигнал. Подробности, относящиеся к блокам фильтров, см. по ссылке: "Multirate Systems and Filter Banks" P.P. Vaidyanathan Prentice Hall: Englewood Cliffs, NJ, 1993. При совместном использовании общего входного сигнала блок фильтров называется анализирующим блоком. Анализирующий блок разделяет поступающий сигнал на М отдельных сигналов, которые называются сигналами поддиапазонов. Анализирующие фильтры можно обозначить Hk(z), где k=0, …, M-1. Блок фильтров является критически дискретизированным, или максимально прореженным, тогда, когда сигналы поддиапазонов прорежены в М раз. Таким образом, общее количество дискретных значений поддиапазонов в единицу времени по всем поддиапазонам является таким же, как количество дискретных значений в единицу времени для входного сигнала. Синтезирующий блок комбинирует сигналы поддиапазонов в общий выходной сигнал. Синтезирующие фильтры обозначаются Fk(z), где k=0, …, M-1.
Максимально прореженный блок фильтров с М каналами, или поддиапазонами, показан на фиг.1. Анализирующая часть 101 генерирует из входного сигнала X(z) сигналы поддиапазонов Vk(z), представляющие собой сигналы, которые необходимо передать, сохранить или модифицировать. Синтезирующая часть 102 рекомбинирует сигналы Vk(z) в выходной сигнал 
Рекомбинация Vk(z) для получения приближения
Следуя условным обозначениям по фиг.1, выходные сигналы анализирующих фильтров Hk(z) 103:

где k=0, …, M-1. Дециматоры 104, также называемые элементами понижающей дискретизации, дают выходные сигналы:

где W=e-i2π/M. Выходные сигналы интерполяторов 105, также называемых элементами повышающей дискретизации, имеют вид:

и сумма сигналов, получаемая из синтезирующих фильтров 106, может быть записана как

где 
является коэффициентом усиления l-й паразитной низкочастотной составляющей X(zWl). Уравнение (4) показывает, что

Последняя сумма с правой стороны составляет сумму всех нежелательных паразитных низкочастотных составляющих. Исключение всех эффектов наложения спектров, которое заставляет эту сумму принять нулевое значение посредством надлежащего выбора Hk(z) и Fk(z), дает

где

является полной передаточной функцией или функцией искажений. Уравнение (8) показывает, что, в зависимости от Hk(z) и Fk(z), T(z) может не содержать искажений фазы и амплитуды. Полная передаточная функция в этом случае может представлять собой просто запаздывание на D дискретных значений с постоянным масштабным коэффициентом с, т.е.

подстановка которого в уравнение (7) дает

Считается, что фильтры, относящиеся к типу, который удовлетворяет уравнению (10), обладают свойством совершенной реконструкции (PR). Если уравнение (10) удовлетворяется неидеально, хотя и приблизительно удовлетворяется, фильтры относятся к классу фильтров с близкой к совершенной реконструкцией.
Ниже описан способ конструирования блоков анализирующих и синтезирующих фильтров из фильтра-прототипа. Результирующие блоки фильтров называются блоками косинусоидально модулированных фильтров. В традиционной теории для блоков косинусоидально модулированных фильтров анализирующие фильтры hk(n) и синтезирующие фильтры fk(n) представляют собой косинусоидально модулированные версии симметричного фильтра-прототипа пропускания нижних частот р0(n), т.е, соответственно,


где М - количество каналов в блоке фильтров и N - порядок фильтра-прототипа.
Приведенный выше блок косинусоидально модулированных фильтров генерирует действительнозначные дискретные значения поддиапазонов для действительнозначных входных сигналов. Дискретные значения поддиапазонов подвергаются понижающей дискретизации в М раз, делая систему критически дискретизированной. В зависимости от выбора фильтра-прототипа, блок фильтров может представлять собой систему с близкой к совершенной реконструкцией, т.е. т.н. блок псевдо-QMF, описанный в патенте США №5436940, или систему совершенной реконструкции (PR). Примером PR-системы является трансформное преобразование (MLT), которое более подробно описано в документе "Lapped Transforms for Efficient Transform/Subband Coding" H.S. Malvar, IEEE Trans ASSP, vol.38, no.6, 1990. Полное запаздывание, или системное запаздывание, для традиционного блока косинусоидально модулированных фильтров равно N.
Для получения систем блоков фильтров, имеющих меньшие системные запаздывания, в настоящем документе предлагается заменить симметричные фильтры-прототипы, используемые в традиционных блоках фильтров, асимметричными фильтрами-прототипами. На текущем уровне техники конструирование асимметричных фильтров-прототипов ограничивается системами, обладающими свойством совершенной реконструкции (PR). Подобные системы совершенной реконструкции, использующие асимметричные фильтры-прототипы, описаны в патенте ЕР0874458. Однако ограничивающие условия совершенной реконструкции налагают ограничения на блок фильтров, используемый, например, в системе выравнивания, в связи с ограничением степеней свободы при конструировании фильтра-прототипа. Следует отметить, что симметричные фильтры-прототипы имеют линейную фазу, т.е. они обладают постоянным групповым запаздыванием по всем частотам. С другой стороны, асимметричные фильтры, как правило, имеют нелинейную фазу, т.е. обладают групповым запаздыванием, которое может изменяться в зависимости от частоты.
В системах блоков фильтров, использующих асимметричные фильтры-прототипы, анализирующие и синтезирующие фильтры могут быть записаны, соответственно, как


где 


где N - длина фильтра-прототипа р0(n).
Следует, однако, отметить, что при использовании схем фильтров, описываемых в настоящем документе, могут определяться и блоки фильтров, использующие отличающиеся анализирующие и синтезирующие фильтры-прототипы.
Одним из свойств, присущих косинусному преобразованию, является то, что каждый фильтр содержит две полосы пропускания: одну - в положительном частотном диапазоне, вторую - в отрицательном частотном диапазоне. Легко убедиться, что т.н. главные, или значимые, паразитные низкочастотные составляющие возникают в результате наложения частот между отрицательными полосами пропускания фильтров и частотно модулированными версиями положительных полос пропускания или, наоборот, между положительными полосами пропускания фильтров и частотно модулированными версиями отрицательных полос пропускания. Последние члены в уравнениях (13) и (14), т.e. члены 
Удаление главных паразитных низкочастотных составляющих может достигаться путем использования т.н. блоков комплексно-экспоненциально модулированных фильтров, которые основываются на расширении косинусоидальной модуляции в комплексно-экскпоненциальную модуляцию. Это расширение приводит к анализирующим фильтрам hk(n) как

с использованием тех же условных обозначений, что и выше. Это может рассматриваться как добавление мнимой части к блоку действительнозначных фильтров, где мнимая часть состоит из синусоидально модулированных версий того же самого фильтра-прототипа. Принимая во внимание действительнозначность входного сигнала, выходной сигнал блока фильтров можно интерпретировать как набор сигналов поддиапазонов, где действительная и мнимая части представляют собой преобразования Гильберта друг друга. Таким образом, результирующие поддиапазоны являются аналитическими сигналами действительнозначного выходного сигнала, получаемого из блока косинусоидально модулированных фильтров. Таким образом, но причине комплекснозначного представления, сигналы поддиапазонов являются двукратно передискретизированными.
Синтезирующие фильтры расширяются аналогичным образом:

Уравнения (16) и (17) подразумевают, что выходной сигнал синтезирующего блока является комплекснозначным. В матричном представлении, где Ca матрица косинусоидально модулированных анализирующих фильтров по уравнению (13), и Sa - матрица синусоидальной модуляции того же аргумента, при этом фильтры по уравнению (16) получаются как Ca+jSa. В этих матрицах k-индекс строки, n - индекс столбца. Аналогично, матрица Cs содержит синтезирующие фильтры по уравнению (14), а матрица Ss представляет собой соответствующую синусоидально модулированную версию. Уравнение (17) можно записать как Cs+jSs, где k - индекс строки, n - индекс столбца. При обозначении входного сигнала как х выходной сигнал y находится из уравнения:

Как видно из уравнения (18), действительная часть включает два члена: выходной сигнал блока косинусоидально модулированных фильтров и выходной сигнал блока синусоидально модулированных фильтров. Легко убедиться в том, что если блок косинусоидально модулированных фильтров обладает свойством совершенной реконструкции (PR), то его синусоидально модулированная версия при смене знака также образует PR-систему. Таким образом, при взятии действительной части выходного сигнала комплексно-экспоненциально модулированная система обеспечивает ту же точность реконструкции, что и соответствующая косинусоидально модулированная версия. Иными словами, при использовании действительнозначного входного сигнала, выходной сигнал комплексно-экспоненциально модулированной системы может определяться путем взятия действительной части выходного сигнала.
Комплексно-экспоненциально модулированная система также может быть расширена для обработки комплекснозначных входных сигналов. Увеличивая количество каналов до 2М, т.е. добавляя фильтры для отрицательных частот, и учитывая мнимую часть выходного сигнала, получается система псевдо-QMF, или PR-система.
Следует отметить, что блок комплексно-экспоненциально модулированных фильтров содержит для каждого фильтра только одну полосу пропускания в положительном частотном диапазоне. Поэтому он не содержит главных паразитных низкочастотных составляющих. Отсутствие главных паразитных низкочастотных составляющих делает ограничение исключения эффекта наложения спектров в блоке косинусоидально (или синусоидально) модулированных фильтров ненужным в комплексно-экспоненциально модулированной версии. Таким образом, анализирующие и синтезирующие фильтры имеют вид:

и

где А - произвольная (возможно, нулевая) константа и, как и ранее, М - количество каналов, N - длина фильтра-прототипа, D - системное запаздывание. Используя различные значения А, можно получить более эффективные реализации блоков анализирующих и синтезирующих фильтров, т.е. реализации с уменьшенной сложностью.
Перед представлением способа оптимизации фильтров-прототипов будут резюмированы раскрытые подходы к конструированию блоков фильтров. На основе симметричных или асимметричных фильтров-прототипов, например, путем модуляции фильтров-прототипов с использованием косинусной функции или комплексной экспоненциальной функции, могут генерироваться блоки фильтров. Фильтры-прототипы для блоков анализирующих и синтезирующих фильтров могут различаться или быть идентичными. При использовании компексно-экспоненциальной модуляции главные паразитные низкочастотные составляющие блоков фильтров являются утратившими актуальность и могут быть исключены, что, таким образом, уменьшает чувствительность эффекта наложения спектров к модификациям сигналов поддиапазонов результирующих блоков фильтров. Кроме того, при использовании асимметричных фильтров-прототипов может быть уменьшено полное системное запаздывание связки блоков фильтров. Также показано, что при использовании блоков комплексно-экспоненциально модулированных фильтров выходной сигнал может определяться из действительнозначного входного сигнала путем взятия действительной части комплексного выходного сигнала блока фильтров.
Ниже подробно описывается способ оптимизации фильтров-прототипов. В зависимости от потребностей оптимизация может быть направлена на увеличение степени совершенства реконструкции, т.е. на уменьшение комбинации эффекта наложения спектров и амплитудного искажения, на уменьшение чувствительности к эффекту наложения спектров, на уменьшение системного запаздывания, на уменьшение фазового искажения и/или на уменьшение амплитудного искажения. Для оптимизации фильтра-прототипа р0(n) определяются первые выражения для коэффициентов усиления паразитных низкочастотных составляющих. Ниже выводятся коэффициенты усиления паразитных низкочастотных составляющих для блока комплексно-экспоненциально модулированных фильтров. Однако следует отметить, что описанные коэффициенты усиления паразитных низкочастотных составляющих также пригодны и для блока косинусоидально модулированных (действительнозначных) фильтров.
Согласно уравнению (4), z-преобразование действительной части выходного сигнала 

Обозначение 


где используется то, что входной сигнал х(n) является действительнозначным, т.е. 
где

являются коэффициентами усиления паразитных низкочастотных составляющих, используемыми в оптимизации. Из уравнения (24) видно, что

В частности, для действительнозначных систем:

что упрощает уравнение (24) в

Изучая уравнение (23) и возвращаясь к преобразованию по уравнению (21), можно видеть, что действительная часть а
0(n) должна представлять собой импульс Дирака для PR-системы, т.е. 


что для действительнозначной системы, учитывая уравнение (26), означает, что все a i(n), l=1…М-1 должны быть равны нулю. В системах псевдо-QMF уравнение (28) сохраняет справедливость лишь приблизительно. Более того, действительная часть a 0(n) не точно представляет собой импульс Дирака, а действительная часть a M/2(n) точно не равна нулю.
Перед переходом к обсуждению других подробностей оптимизации фильтров-прототипов исследуется влияние модификаций дискретных значений поддиапазонов на эффект наложения спектров. Как уже упоминалось выше, изменение коэффициентов усиления каналов в блоке косинусоидально модулированных фильтров, т.е. использование анализирующей/синтезирующей системы в качестве эквалайзера, приводит к серьезному искажению из-за главных паразитных низкочастотных составляющих. Теоретически главные паразитные низкочастотные составляющие попарно сокращаются. Однако теория исключения главных паразитных низкочастотных составляющих не работает тогда, когда к разным каналам поддиапазонов применяются разные коэффициенты усиления. Поэтому эффект наложения спектров в выходном сигнале может быть значительным. Для того чтобы это показать, рассмотрим блок фильтров, в котором канал р и более высокие каналы установлены на нулевое усиление, т.е.

Стилизованные частотные характеристики представляющих интерес анализирующих и синтезирующих фильтров показаны на фиг.2. Фиг.2(а) показывает фильтры синтезирующих каналов Fp-l(z) и Fp(z), выделенные
ссылочными позициями 201 и 202 соответственно. Как уже указывалось выше, косинусоидальная модуляция каждого канала приводит к одному фильтру с положительной частотой и одному фильтру с отрицательной частотой. Иными словами, фильтры 201 и 202 с положительной частотой имеют соответствующие фильтры 203 и 204, соответственно, с отрицательной частотой.
Р-я модуляция анализирующего фильтра Hp-l(z), т.е. Hp-l(zWp), указанная ссылочными позициями 211 и 212, изображена на фиг.2(b) вместе с синтезирующим фильтром Fp-l(z), указанным ссылочными позициями 201 и 203. На этой фигуре ссылочная позиция 211 указывает на модулированную версию оригинального фильтра Hp-l(z) с положительной частотой, а ссылочная позиция 211 указывает на модулированную версию оригинального фильтра Hp-l(z) с отрицательной частотой. Из-за модуляции порядка р фильтр 213 с отрицательной частотой перемещается в область положительных частот и, следовательно, накладывается на положительный синтезирующий фильтр 201. Заштрихованное наложение 220 фильтров иллюстрирует энергию главной паразитной низкочастотной составляющей.
На фиг.2(с) р-я модуляция фильтра Hp(z), т.е. Hp(zWp), указанная ссылочными позициями 212 и 214, показана совместно с соответствующим синтезирующим фильтром Fp(z) (ссылочные позиции 202 и 204). Здесь также фильтр 214 с отрицательной частотой из-за модуляции порядка p перемещается в область положительных частот. Заштрихованная область 221 здесь также графически показывает энергию главной паразитной низкочастотной составляющей и невозможность исключения, что, как правило, приводит к значительному эффекту наложения спектров. Для исключения эффекта наложения спектров данный член должен являться копией эффекта наложения спектров, полученного при пересечении фильтров Hp-l(zWp) 213 и Fp-l(z) 201 по фиг.2(b), с обращенной полярностью, т.е. копией заштрихованной области 220 с обращенной полярностью. В блоке косинусоидально модулированных фильтров, где коэффициенты усиления неизменны, главные паразитные низкочастотные составляюшщие обычно полностью гасят друг друга. Однако в данном примере коэффициент усиления анализирующих (или синтезирующих) фильтров равен нулю, поэтому эффект наложения спектров, индуцируемый фильтрами р-1, будет оставаться непогашенным в выходном сигнале. Столь же сильный остаточный эффект наложения спектров будет возникать также и в области отрицательных частот.
При использовании блоков комплексно-экспоненциально модулированных фильтров комплекснозначная модуляция приводит только к фильтрам с положительными частотами. Следовательно, главные паразитные низкочастотные составляющие исчезают, т.е. значительное наложение между модулированными анализирующими фильтрами Hp(zWp) и их соответствующими синтезирующими фильтрами Fp(z) отсутствует, а эффект наложения спектров при использовании таких систем блоков фильтров в качестве эквалайзеров может быть значительно уменьшен. Результирующий эффект наложения спектров зависит только от степени подавления остаточных паразитных низкочастотных составляющих.
Таким образом, даже при использовании блоков комплексно-экспоненциально модулированных фильтров, решающее значение имеет конструкция фильтра-прототипа, пригодная для максимального подавления паразитных низкочастотных составляющих, несмотря на то что главные паразитные низкочастотные составляющие для этих блоков фильтров исключены. Даже если остаточные паразитные низкочастотные составляющие менее значимы, чем главные паразитные низкочастотные составляющие, они могут по прежнему генерировать эффект наложения спектров, который приводит к возникновению артефактов в обработанном сигнале. Поэтому конструирование такого фильтра-прототипа предпочтительно выполняется путем минимизации сложной целевой функции. Для этого могут быть использованы различные алгоритмы оптимизации. Примерами являются, например, методы линейного программирования, метод Нелдера-Мида, методы на основе неограниченного градиента или другие алгоритмы нелинейной оптимизации. В одном из иллюстративных вариантов осуществления изобретения выбирается исходное решение фильтра-прототипа. С использованием сложной целевой функции определяется направление модификации коэффициентов фильтра-прототипа, обеспечивающей максимально высокий градиент сложной целевой функции. Затем коэффициенты фильтра модифицируются с использованием определенной длины шага, и итеративная процедура повторяется до достижения минимума сложной целевой функции. Подробности, касающиеся этой оптимизации, см. по ссылке: "Numerical Recipes in С, The Art of Scientific Computing, Second Edition" W. H. Press, S. A. Teukolsky, W. T. Vetterling, B. P. Flannery, Cambridge University Press, NY, 1992, которая ссылкой включается в настоящее описание.
Для усовершенствованной минимизации паразитных низкочастотных составляющих (IATM) фильтра-прототипа, предпочтительная целевая функция обозначается как

где общая ошибка etot(α) представляет собой взвешенную сумму ошибки et передаточной функции и ошибку ea эффекта наложения спектров. Первый член с правой стороны (RHS) уравнения (23), определенный на единичной окружности, т.е. для z=ejω, может быть использован для создания меры энергии ошибок е, передаточной функции:

где P(ω) - симметричная действительнозначная функция, определяющая диапазоны полосы пропускания и полосы задерживания, D - общее системное запаздывание. Иными словами, Р(ω) описывает требуемую передаточную функцию. В самом общем случае эта передаточная функция включает абсолютное значение, которое является функцией частоты ω. Для действительнозначной системы уравнение (31) упрощается до

Целевая функция P(ω) и целевое запаздывание D могут быть выбраны в качестве входного параметра процедуры оптимизации. Выражение Р(ω)е-jωD можно назвать целевой передаточной функцией.
Меру энергии общего эффекта наложения спектров ea можно вычислить путем определения суммы членов наложения спектров с правой стороны (RHS) уравнения (23), т.е. второго члена уравнения (23), на единичной окружности:

Для действительнозначных систем уравнение переходит в
В целом процедура оптимизации для определения фильтра-прототипа р0(π) может основываться на минимизации ошибки по уравнению (30). Параметр α может использоваться для распределения акцентируемого внимания между передаточной функцией и чувствительностью фильтра-прототипа к эффекту наложения спектров. При увеличении параметра α в направлении 1 большее внимание будет направляться на ошибку et передаточной функции, а при уменьшении параметра α в сторону 0 большее внимание будет направляться на ошибку ea эффекта наложения спектров. Для задания целевой передаточной функции фильтра-прототипа р0(n), т.е. для определения поведения полосы пропускания и полосы задерживания, а также для определения полного системного запаздывания, могут использоваться параметры Р(ω) и D.
Согласно одному из примеров, некоторому количеству каналов k блока фильтров могут быть присвоены нулевые значения, например, нулевые значения присваиваются коэффициентам усиления верхней половины каналов блока фильтров. Соответственно, блок фильтров запускается и генерирует большую величину эффекта наложения спектров. Эффект наложения спектров затем минимизируется в процессе оптимизации. Иными словами, эффект наложения спектров индуцируется путем присвоения нулевых значений некоторому количеству каналов блока фильтров для того, чтобы генерировать ошибку ea эффекта наложения спектров, которая может быть минимизирована в ходе процедуры оптимизации. Кроме того, путем присвоения нулевых значений каналам блока фильтров может быть уменьшена вычислительная сложность.
Согласно одному из примеров, фильтр-прототип оптимизируется для блока действительнозначных, т.е. косинусоидально модулированного блока фильтров, что может быть более подходящим, чем прямая оптимизации комплекснозначиой версии. Так происходит потому, что действительнозначная обработка уделяет первостепенное внимание уменьшению эффекта отдаленного наложения спектров в большей степени, чем комплекснозначная обработка. Однако при запуске эффекта наложения спектров так, как описано выше, бóльшая часть индуцированного эффекта наложения спектров, в данном случае, как правило, будет возникать за счет членов, несущих главные паразитные низкочастотные составляющие.
Таким образом, алгоритм оптимизации может расходовать ресурсы на минимизацию главного эффекта наложения спектров, который по существу отсутствует в результирующей комплексно-экспоненциально модулированной системе. Для того чтобы избежать этого, оптимизацию можно выполнить для частично-комплексной системы; для паразитных низкочастотных составляющих, которые не содержат главного эффекта перекрывания спектров, оптимизация может выполняться с использованием обработки действительнозначными фильтрами. С другой стороны, паразитные низкочастотные составляющие, которые могут содержать главные паразитные низкочастотные составляющие к действительнозначной системе, могут модифицироваться для обработки комлекснозначными фильтрами. Посредством такой частично-комплексной оптимизации можно получить преимущества выполнения обработки с использованием действительнозначной обработки и в то же время по-прежнему оптимизировать фильтр-прототип для использования в системе блока комплексно модулированных фильтров.
В иллюстративной оптимизации, где нулевые значения присваиваются точно верхней половине каналов блока фильтров, единственным членом, вычисляемым из комплекснозначных фильтров, является член l=М/2 no уравнению (33). В этом примере функция Р(ω) по уравнению (31) может быть выбрана как константа в единицах измерения абсолютного значения в интервале от -π/2+ε до π/2-ε, где ε - доля π/2, для того чтобы покрыть частотный интервал, составляющий полосу пропускания. За пределами полосы пропускания функция Р(ω) может быть определена как нулевая или может быть оставлена неопределенной. В последнем случае энергия ошибки передаточной функции по уравнению (31) определяется только в интервале от -π/2+ε до π/2-ε. В альтернативном и предпочтительном варианте ошибку et полосы пропускания можно вычислить по всем каналам k=0, …, M-1, в интервале от -π до π с постоянной Р(ω), в то время как эффект наложения спектров по-прежнему вычисляется при помощи ряда каналов, которым присвоены нулевые значения так, как описано выше.
Как правило, процедура оптимизации является итеративной процедурой, посредством которой для заданных на некотором шаге итерации коэффициентов фильтра-прототипа p0(n)(n=0, …, N-1), целевого запаздывания D, количества каналов М, количества каналов низких частот, которым присвоены нулевые значения loCut, количества каналов высоких частот, которым присвоено нулевое значение hiCut, и весового коэффициента α вычисляется значение целевой функции на этом шаге итерации. Использование полукомплексных операций включает следующие этапы:
1. Для получения ошибки et полосы пропускания - вычислить уравнение (32) с постоянной Р(ω), используя

где Hk(ejω) и Fk(ejω), соответственно DFT-преобразования анализирующих и синтезирующих фильтров hk(n) и fk(n) как генерируемых на основе коэффициентов фильтра-прототипа на данном шаге итерации из уравнений (13)-(15).
2. Для получения ошибки ea эффекта наложения спектров для членов эффекта наложения спектров, не подверженных значительному эффекту наложения спектров, - определить

где Al(ejω) вычисляется как

и Hk(ejω), и Fk(ejω) - DFT-преобразования, т.е. z-преобразования, вычисленные на единичной окружности, анализирующих и синтезирующих фильтров hk(n) и fk(n) по уравнениям (13)-(15).
3. Для элементов, подверженных значительному эффекту наложения спектров, - определить
где 
4. Затем ошибка взвешивается с α как

С использованием любого из вышеописанных алгоритмов нелинейной оптимизации эта общая ошибка уменьшается путем модификации коэффициентов фильтра-прототипа до получения оптимального набора коэффициентов. Например, направление максимального градиента функции ошибок etot определяется для коэффициентов фильтра-прототипа на данном шаге итерации. С использованием шага определенной величины коэффициенты фильтра-прототипа модифицируются в направлении максимального градиента. Модифицированные коэффициенты фильтра-прототипа используются в качестве отправной точки для последующего шага итерации. Процедура повторяется до тех пор, пока процедура оптимизации не будет сходиться к минимальному значению функции ошибок etot.
Иллюстративный вариант осуществления процедуры оптимизации показан на фиг.3 в виде блок-схемы 300. На этапе 301 определения параметров определяются параметры процедуры оптимизации, т.е. в особенности целевая передаточная функция, включающая целевое запаздывание D, количество каналов М целевого блока фильтров, количество N коэффициентов фильтра-прототипа, весовой параметр сложной целевой функции, а также параметры генерирования эффекта наложения спектров, т.е. loCut и/или hiCut. На этапе 302 инициализации выбирается первый набор коэффициентов фильтра-прототипа.
В блоке 303 определения ошибки полосы пропускания с использованием заданного набора коэффициентов фильтра-прототипа определяется член et ошибки полосы пропускания. Это может осуществляться с использованием уравнения (32) в сочетании с уравнениями (35) и (13)-(15). В блоке 304 определения действительнозначной ошибки эффекта наложения спектров с использованием уравнений (36) и (37) в сочетании с уравнениями (13) (15) может определяться первая часть еâReal члена ea ошибки эффекта наложения спектров. Затем в блоке 305 определения комплекснозначной ошибки эффекта наложения спектров с использованием уравнения (38) в сочетании с уравнениями (19) и (20) может определяться вторая часть еâCplx члена ea ошибки эффекта наложения спектров. Как следствие, целевая функция etot определяется из результатов блоков 303, 304 и 305 с использованием уравнения (39).
Блок 306 нелинейной оптимизации использует методы оптимизации, такие как линейное программирование, для уменьшения значения целевой функции. В качестве примера, это осуществляется путем определения максимально возможного градиента целевой функции относительно модификаций коэффициентов фильтра-прототипа. Иными словами, определяются те модификации коэффициентов фильтра-прототипа, которые приводят к максимально возможному уменьшению значения целевой функции.
Если градиент, определенный в блоке 306, остается в заранее заданных пределах, блок 307 принятия решения принимает решение о том, что минимум целевой функции достигнут, и завершает процедуру оптимизации на этапе 308. Если, с одной стороны, градиент превышает заранее заданное значение, то коэффициенты фильтра-прототипа корректируются в блоке 309 корректировки. Корректировка коэффициентов может выполняться путем модификации коэффициентов с заранее заданным шагом в направлении, задаваемом градиентом. В конечном итоге, скорректированные коэффициенты фильтра-прототипа повторно вводятся в качестве входных данных в блок 303 определения ошибки полосы пропускания для осуществления следующей итерации процедуры оптимизации.
В общем, можно утверждать, что при использовании описанной выше функции ошибок и надлежащего алгоритма оптимизации можно определить фильтры-прототипы, которые оптимизируются в отношении их уровня совершенства реконструкции, т.е. относительно малого эффекта наложения спектров в сочетании с низкими фазовыми и/или амплитудными искажениями, устойчивости к эффекту наложения спектров, возникающему из-за модификаций поддиапазонов, системного запаздывания и/или передаточной функции. Способ конструирования предусматривает параметры, в особенности весовой коэффициент α, целевое запаздывание D, целевую передаточную функцию Р(ω). длину фильтра N, количество каналов М блока фильтров, а также параметры триггера эффекта наложения спектров hiCut, loCut, которые могут выбираться с целью получения оптимальной комбинации вышеупомянутых свойств фильтра. Кроме того, для уменьшения общей сложности процедуры оптимизации может использоваться присвоение нулевых значений определенному количеству каналов поддиапазонов, а также частично-комплексная обработка. В результате могут быть определены асимметричные фильтры-прототипы, обладающие свойствами близкой к совершенной реконструкции, низкой чувствительности к эффекту наложения спектров и малого системного запаздывания, для применения в блоке комплексно-экспоненциально модулированных фильтров. Следует отметить, что приведенная выше схема определения фильтра-прототипа описана в контексте блока комплексно-экспоненциально модулированных фильтров. Если используются другие способы конструирования блоков фильтров, например способы конструирования блоков косинусоидально модулированных или синусоидально модулированных фильтров, то процедуру оптимизации можно адаптировать путем генерирования анализирующих и синтезирующих филыров hk(n) и fk(n) использования уравнений конструирования для соответствующего способа конструирования блока фильтров. Например, уравнения (13)-(15) могут использоваться в контексте блока косинусоидально модулированных фильтров.
Ниже описан подробный пример 64-канального блока фильтров с малым запаздыванием. С использованием предложенного вышеописанного способа оптимизации будет описан подробный пример 64-канального блока фильтров (М=64) с оптимизированными паразитными низкочастотными составляющими. В этом примере используется способ частично-комплексной оптимизации, и самым верхним каналам в ходе оптимизации фильтра-прототипа присваиваются нулевые значения, т.е. hiCut-40, в то время как параметр loCut не используется. Таким образом, все паразитные низкочастотные составляющие, кроме 
Несмотря на то что приведенное выше описание конструирования блока фильтров основывается на стандартном представлении блока фильтров, пример эксплуатации сконструированного блока фильтров может использоваться и для других представлений и описаний блока фильтров, например для реализации блока фильтров, позволяющих осуществлять его более эффективную эксплуатацию на процессоре цифровой обработки сигналов.
В одном из примеров этапы фильтрации сигнала во временной области с использованием оптимизированного фильтра-прототипа могут быть описаны следующим образом:
- для эффективной эксплуатации блока фильтров, фильтр-прототип, т.е. p0(n), вначале упорядочивается в полифазном представлении, где каждый второй коэффициент из коэффициентов полифазного фильтра является отрицательным и все коэффициенты являются перевернутыми по времени:

- Этап анализа начинается с того, что полифазное представление фильтра применяется к сигналу х(n) с образованием вектора xl(n) длиной 128:

- xl(n) затем умножается на матрицу модуляции:

где νk(n), k=0…63, представляют собой сигналы под диапазонов. В результате индекс времени n задается в дискретных значениях поддиапазонов.
- Комплекснозначные сигналы могут затем быть модифицированы, например, в соответствии с некоторой требуемой, возможно, изменяющейся во времени и комплекснозначной, кривой выравнивания dk(n):

- Этап синтеза начинается с этапа демодуляции модифицированных сигналов поддиапазонов:

Следует отметить, что этапы демодуляции по уравнениям (42) и (44) могут выполняться чрезвычайно эффективным вычислительным способом посредством быстрых алгоритмов, использующих ядра быстрого преобразования Фурье (FFT).
- Демодулированные дискретные значения фильтруются посредством полифазного представления фильтра-прототипа и накапливаются в выходном сигнале 

где на момент запуска
Следует отметить, что реализации как с плавающей точкой, так и с фиксированной точкой могут изменять численную точность коэффициентов, приведенных в таблице 1, для их большей пригодности к обработке. Не выходя за рамки объема изобретения, значения могут быть квантованы до меньшей численной точности путем округления, отбрасывания и/или масштабирования коэффициентов до целого или иных представлений, в частности представлений, которые адаптированы к доступным ресурсам аппаратной и/или программной платформы, на которой должен эксплуатироваться блок фильтров.
Кроме того, приведенный выше пример описывает эксплуатацию, при которой выходной сигнал во временной области имеет ту же частоту дискретизации, что и входной сигнал. Другие реализации могут изменять шаг дискретизации сигнала во временной области путем использования отличающихся размеров, т.е. отличающихся количеств каналов, соответственно, блоков анализирующих и синтезирующих фильтров. Однако блоки фильтров должны основываться на одном и том же фильтре-прототипе и получаться путем изменения шага дискретизации оригинального фильтра-прототипа путем прореживания или интерполяции. Например, фильтр-прототип для 32-канального блока фильтров получается путем изменения шага дискретизации коэффициентов р0(n):

Длина нового фильтра-прототипа, таким образом, составляет 320, запаздывание - 





Ниже описаны различные особенности практических реализаций. При использовании стандартного персонального компьютера или процессора цифровой обработки сигналов возможна эксплуатация блока комплексно-экспоненциально модулированных фильтров с малым запаздыванием в реальном времени. Блок фильтров также может быть жестко запрограммирован на специализированной микросхеме. Фиг.5(а) показывает конструкцию для эффективной реализации анализирующей части системы блока комплексно-экспоненциально модулированных фильтров. Аналоговый входной сигнал вначале подается на аналого-цифровой преобразователь 501. Цифровой сигнал во временной области подается в сдвиговый регистр 502, удерживающий 2М дискретных значений и сдвигающий за раз М дискретных значений. Сигналы из сдвигового регистра затем фильтруются через полифазные коэффициенты фильтра-прототипа 503. Фильтрованные сигналы затем комбинируются 504 и параллельно преобразовываются посредством преобразований DCT-IV 505 и DST-IV 506. Выходные сигналы из косинусного и синусного преобразований представляют, соответственно, действительную и мнимую части дискретных значений поддиапазонов. Коэффициенты усиления дискретных значений поддиапазонов модифицируются в соответствии с текущими настройками 507 регулятора огибающей спектра.
Эффективная реализация синтезирующей части комплексно-экспоненциально модулированной системы с малым запаздыванием показана на фиг.5(b). Дискретные значения поддиапазонов вначале умножаются на комплекснозначные настраиваемые параметры, т.е. на комплекснозначные константы, зависящие от каналов, 511, действительная часть модулируется посредством преобразования DCT-IV 512, а мнимая часть - посредством преобразования DST-IV 513. Выходные сигналы преобразований комбинируются 514 и подаются через полифазные компоненты фильтра-прототипа 515. Выходной сигнал во временной области получается из сдвигового регистра 516. Наконец, цифровой выходной сигнал преобразовывается обратно в аналоговую форму 517.
Несмотря на то что описанные выше реализации используют преобразования DCT и DST типа IV, в равной мере возможны реализации, использующие ядра DCT типов II и III (а также реализации на основе DST типов II и III), однако наиболее эффективные в вычислительном плане реализации комплексно-экспоненциальных блоков используют чистые ядра FFT. Реализации, использующие прямое перемножение матрицы и вектора, также возможны, однако они имеют меньшую эффективность.
Подводя итог вышесказанному, настоящий документ описывает способ конструирования фильтров-прототипов, используемых в блоках анализирующих/синтезирующих фильтров. Требуемыми свойствами фильтров-прототипов и результирующих блоков анализирующих/синтезирующих фильтров являются: близкая к совершенной реконструкция, малое запаздывание, низкая чувствительность к эффекту наложения спектров и минимальные амплитудные/фазовые искажения. Предложена функция ошибок, которая может быть использована в алгоритме оптимизации для определения надлежащих коэффициентов фильтров-прототипов. Функция ошибок включает набор параметров, которые могут настраиваться для модификации акцентирования внимания между требуемыми свойствами фильтров. Предпочтительно используются асимметричные фильтры-прототипы. Кроме того, описан фильтр-прототип, который обеспечивает хороший компромисс между требуемыми свойствами фильтра, т.е. близкой к совершенной реконструкцией, малым запаздыванием, низкой чувствительностью к эффекту наложения спектров и минимальными амплитудными/фазовыми искажениями.
Несмотря на то что здесь описаны конкретные варианты осуществления и применения изобретения, средним специалистам в данной области станет ясно, что возможно множество вариаций вариантов осуществления и применения изобретения без отступления от объема изобретения, раскрытого в описании и формуле настоящего документа. Следует понимать, что несмотря на то что были показаны и описаны некоторые формы изобретения, изобретение не следует ограничивать конкретными вариантами его осуществления, которые были описаны и показаны, или конкретными описанными способами.
Описанные в настоящем документе способ и система конструирования фильтра и блока фильтров могут реализовываться как программное обеспечение, встроенное программное обеспечение и/или аппаратное обеспечение. Некоторые компоненты могут быть реализованы, например, как программное обеспечение для запуска на процессоре цифровой обработки сигналов или микропроцессоре. Другие компоненты могут быть реализованы, например, как аппаратное обеспечение или как специализированная микросхема. Сигналы, встречающиеся в описанных способах и системах, могут храниться на носителях, таких как оперативные запоминающие устройства или оптические носители информации. Они могут передаваться по сетям, таким как радиосети, спутниковые сети, беспроводные сети или проводные сети, например Интернет. Типичными устройствами, использующими блоки фильтров, описанные в настоящем документе, являются дополнительные внешние устройства или другое оборудование на территории пользователя, которое декодирует звуковые сигналы. На стороне кодирования блоки фильтров могут быть использованы на радиовещательных станциях, например в видеосистемах headend.



Изобретение относится к блокам модулированных субдискретизированных цифровых фильтров, а также к способам и системам для конструирования этих блоков фильтров. Техническим результатом является создание способа конструирования блоков фильтров, генерирующих низкий уровень ошибок. Описывается специфическая конструкция для (64)-канального блока фильтров, использующая фильтр-прототип длиной (640) коэффициентов и системное запаздывание на (319) дискретных значений. Способ значительно уменьшает артефакты, связанные с эффектом наложения спектров, возникающим в результате независимых модификаций сигналов поддиапазонов, например, при использовании блока фильтров в качестве выравнивателя спектра. Способ предпочтительно реализуется в программном обеспечении, выпускаемом на стандартном ПК или процессоре обработки цифровых сигналов (DSP), но также может быть жестко запрограммирован на специализированной микросхеме. Способ предлагает усовершенствования для различных типов эквалайзеров, адаптивных фильтров, многополосных компандеров и блоков фильтров регулировки огибающей спектра, используемых для высокочастотной реконструкции (HFR) или параметрических стереофонических систем. 6 н. и 15 з.п. ф-лы, 1 табл., 5 ил.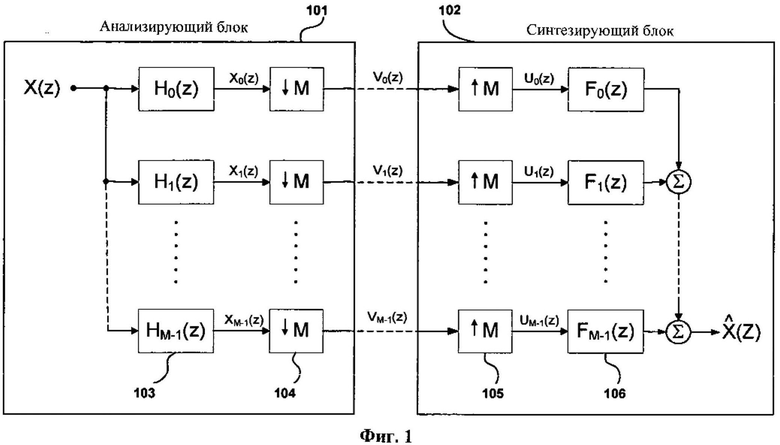
1. Способ (300) определения N коэффициентов асимметричного фильтра-прототипа р0 для его использования для построения М-канального блока (101, 102) прореженных анализирующих/синтезирующих фильтров с малым запаздыванием, включающего М анализирующих фильтров hk (103) и М синтезирующих фильтров fk (106), k=0, …, М-1, где М больше 1, и содержащего передаточную функцию, причем способ включает следующие этапы на которых:
- выбирают (301) целевую передаточную функцию блока фильтров, включающую целевое запаздывание D, где D меньше или равно N;
- определяют (303, 304, 305) сложную целевую функцию etot, включающую член et ошибки полосы пропускания и член еа ошибки эффекта наложения спектров; где член et ошибки полосы пропускания связан с отклонением между передаточной функцией блока фильтров и целевой передаточной функцией; и где член еа ошибки эффекта наложения спектров связан с ошибками, возникающими вследствие субдискретизации блока фильтров;
при этом член et ошибки полосы пропускания определяют (303) путем накопления квадратичного отклонения между передаточной функцией блока фильтров и целевой передаточной функцией для ряда частот; и
- определяют (306, 309) N коэффициентов асимметричного фильтра-прототипа р0, которые уменьшают значение сложной целевой функции etot.
2. Способ (300) по п.1, отличающийся тем, что сложная целевая функция etot имеет вид:

где α - весовая константа, принимающая значения от 0 до 1.
3. Способ (300) по п.2, отличающийся тем, что член et ошибки полосы пропускания вычисляют (303) как

где 
где Hk(z) и Fk(z) - соответственно z-преобразования анализирующих и синтезирующих фильтров hk(n) и fk(n).
4. Способ (300) по п.2, отличающийся тем, что член еа ошибки эффекта наложения спектров определяют (304, 305) путем накопления квадратичных абсолютных значений паразитных низкочастотных составляющих для ряда частот.
5. Способ (300) по п.4, отличающийся тем, что член ea ошибки наложения спектров вычисляется (304, 305) как
где 
является коэффициентом усиления 1-й паразитной низкочастотной составляющей, определенной на единичной окружности с W=e-i2π/M, где Hk(z) и Fk(z) являются соответственно z-преобразованиями анализирующих и синтезирующих фильтров hk(n) и fk(n).
6. Способ (300) по любому из предыдущих пунктов, отличающийся тем, что этап определения (303, 304, 305) сложной целевой функции etot и этап определения (306, 309) N коэффициентов асимметричного фильтра-прототипа р0 повторяются итеративно до достижения минимума сложной целевой функции etot.
7. Способ (300) по п.6, отличающийся тем, что
- этап определения (303, 304, 305) сложной целевой функции etot включает определение значения сложной целевой функции etot для заданных коэффициентов фильтра-прототипа р0; и
- этап определения (306, 309) N коэффициентов асимметричного фильтра-прототипа р0 включает определение (309) скорректированных коэффициентов фильтра-прототипа р0 на основе градиента сложной целевой функции etot относительно коэффициентов фильтра-прототипа р0.
8. Способ (300) по п.7, отличающийся тем, что этап определения (303, 304, 305) значения сложной целевой функции etot включает:
- генерирование анализирующих фильтров hk и синтезирующих фильтров fk блока анализирующих/синтезирующих фильтров на основе фильтра-прототипа р0 с использованием косинусоидальной модуляции, синусоидальной модуляции и/или комплексно-экспоненциальной модуляции.
9. Способ (300) по п.8, отличающийся тем, что анализирующие и синтезирующие фильтры определяются как

где n=0…N-1, для М анализирующих фильтров блока анализирующих фильтров; и

где n=0…N-1, для М синтезирующих фильтров блока синтезирующих фильтров.
10. Способ (300) по п.9, отличающийся тем, что анализирующие и синтезирующие фильтры определяются как

где n=0…N-1, и А является произвольной константой, для М анализирующих фильтров блока анализирующих фильтров; и

где n=0…N-1, для М синтезирующих фильтров блока синтезирующих фильтров.
11. Способ (300) по п.10, отличающийся тем, что этап определения (303, 304, 305) значения сложной целевой функции etot включает:
- присвоение, по меньшей мере, одному из каналов блока фильтров нулевого значения.
12. Способ (300) по п.11, отличающийся тем, что
- низкочастотные каналы блока фильтров k=0 до Clow, где Clow больше нуля и/или
- высокочастотные каналы блока фильтров k=Chigh до М-1, где Chigh меньше М-1,
приведены к нулю.
13. Способ (300) по п.12, отличающийся тем, что этап определения (303, 304, 305) значения сложной целевой функции etot включает:
- генерирование анализирующих и синтезирующих фильтров для каналов Clow и М-Clow и/или Chigh и M-Chigh с использованием п.10; и
- генерирование анализирующих и синтезирующих фильтров для оставшихся каналов с использованием п.9.
14. Способ (300) по п.13, отличающийся тем, что
- блок анализирующих фильтров генерирует из входного сигнала М сигналов поддиапазонов с использованием М анализирующих фильтров hk (103);
- М сигналов поддиапазонов прореживаются (104) в М раз, давая прореженные сигналы поддиапазонов;
- прореженные сигналы поддиапазонов подвергаются повышающей дискретизации (105) в М раз; и
- блок синтезирующих фильтров генерирует выходной сигнал из прореженных сигналов поддиапазонов, подвергнутых повышающей дискретизации, с использованием М синтезирующих фильтров fk (106).
15. Способ (300) по п.14, отличающийся тем, что
- М=64;
- N=640; и
- D=319.
16. Блок фильтров, содержащий М фильтров, основанных на асимметричном фильтре-прототипе р0(n), который включает коэффициенты, выводимые из коэффициентов по таблице 1, посредством одной из таких операций как округление, отбрасывание или масштабирование, а также субдискретизация или передискретизация, и/или основанных на асимметричном фильтре-прототипе, генерируемом посредством способа по любому из пп.1-15.
17. Блок фильтров по п.16, отличающийся тем, что
- М фильтров являются модулированными версиями фильтра-прототипа; и
- модуляция является косинусоидальной модуляцией, синусоидальной модуляцией и/или комплексно-экспоненциальной модуляцией.
18. Способ генерирования прореженных сигналов поддиапазонов с низкой чувствительностью к эффекту наложения спектров, возникающему в результате модификаций указанных сигналов поддиапазонов, где способ включает следующие этапы на которых:
- определяют анализирующие фильтры блока анализирующих/синтезирующих фильтров по п.16 или 17;
- фильтруют действительнозначный сигнал во временной области через указанные анализирующие фильтры для получения комплекснозначных сигналов поддиапазонов; и
- прореживают указанные сигналы поддиапазонов.
19. Способ генерирования действительнозначного выходного сигнала из ряда комплекснозначных сигналов поддиапазонов с низкой чувствительностью к эффекту наложения спектров, возникающему в результате модификаций указанных сигналов поддиапазонов, при этом способ включает следующие этапы на которых:
- определяют синтезирующие фильтры блока анализирующих/синтезирующих фильтров по п.16 или 17;
- интерполируют указанный ряд комплекснозначных сигналов поддиапазонов;
- фильтруют указанный ряд интерполированных сигналов поддиапазонов через указанные синтезирующие фильтры;
- генерируют комплекснозначный выходной сигнал во временной области как сумму сигналов, полученных из указанной фильтрации; и
- берут действительную часть комплекснозначного выходного сигнала во временной области как действительнозначный выходной сигнал.
20. Система, которая функционирует, генерируя сигналы поддиапазонов из входного сигнала во временной области, при этом система включает блок анализирующих фильтров по п.16 или 17.
21. Устройство, которое функционирует, определяя N коэффициентов асимметричного фильтра-прототипа р0 для его использования для построения М-канального блока (101, 102) прореженных анализирующих/синтезирующих фильтров с малым запаздыванием, включающего М анализирующих фильтров hk (103) и М синтезирующих фильтров fk (106), k=0, …, М-1, где М больше 1, и содержащего передаточную функцию, при этом устройство содержит
- блок (301) задания параметров, функционирующий для задания целевой передаточной функции блока фильтров, включающей целевое запаздывание D; при этом D меньше или равно N;
- блок (303, 304, 305) определения ошибок, функционирующий для определения сложной целевой функции etot, содержащий член et ошибки полосы пропускания и член ea ошибки эффекта наложения спектров; при этом член et ошибки полосы пропускания связан с отклонением между передаточной функцией блока фильтров и целевой передаточной функцией, и где член еа ошибки эффекта наложения спектров связан с ошибками, возникающими вследствие субдискретизации блока фильтров; и
- блок (306, 309) оптимизации, функционирующий для определения N коэффициентов асимметричного фильтра-прототипа р0, которые уменьшают значение сложной целевой функции etot.
| Плавучее грузовое средство | 1978 |
|
SU874458A1 |
| СПОСОБ ОБРАТНОЙ ФИЛЬТРАЦИИ, СПОСОБ СИНТЕЗИРУЮЩЕЙ ФИЛЬТРАЦИИ, УСТРОЙСТВО ДЛЯ ОБРАТНОЙ ФИЛЬТРАЦИИ, УСТРОЙСТВО ДЛЯ СИНТЕЗИРУЮЩЕЙ ФИЛЬТРАЦИИ И ПРИСПОСОБЛЕНИЯ, СОДЕРЖАЩИЕ ТАКИЕ ФИЛЬТРУЮЩИЕ УСТРОЙСТВА | 2002 |
|
RU2297049C2 |
| АДАПТИВНЫЙ КОРРЕКТИРУЮЩИЙ ФИЛЬТР | 1993 |
|
RU2125764C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ПЕРЕДАЧИ | 1990 |
|
RU2145464C1 |

