Изобретение относится к системе приведения в действие по меньшей мере одного регулируемого закрылка на соответственно одном крыле самолета, а также к способу проверочного испытания системы приведения в действие закрылков. Прежде всего изобретение относится к системе обеспечения большой подъемной силы для приведения в действие по меньшей мере одного закрылка на крыле самолета, а также к способу проверочного испытания системы приведения в действие закрылков.
Документ WO 2007/068413 описывает способ и устройство для обеспечения автоматического снижения нагрузок в системе обеспечения большой подъемной силы самолета.
Из общего уровня техники известно, что отдельные поверхности для обеспечения большой подъемной силы, называемые также предкрылками или закрылками, регулируются системой с центральным двигателем. При этом центральный двигатель приводит в действие проходящий вдоль крыла приводной вал, который передает приводной момент к отдельным исполнительным передачам (исполнительным механизмам) на предкрылки или закрылки.
Система обеспечения большой подъемной силы может быть выполнена таким образом, что предварительно определенные ошибки, которые возникают в системе, могут быть компенсированы без угрозы безопасности для самолета. Для этого, прежде всего, предусмотрено встраивание тормозов и сенсорной техники для обнаружения ошибки и/или вторичные несущие элементы для того, чтобы поддерживать поверхности для обеспечения большой подъемной силы в определенном положении. Если к одному регулируемому закрылку подсоединены два исполнительных механизма, и если каждый исполнительный механизм оснащен отдельным путем нагружения, для компенсации конструктивного отказа одного из двух исполнительных механизмов соответственно другой исполнительный механизм может зафиксировать поверхность для обеспечения большой подъемной силы в ее мгновенном положении. Если несколько регулируемых закрылков на одном и том же крыле регулируются соответственно двумя исполнительными механизмами с отдельным путем нагружения, может быть предусмотрена вторичная соединительная связь между закрылками, которая соединяет два закрылка таким образом, что при отказе одного исполнительного механизма одного регулируемого закрылка этот регулируемый закрылок посредством этой соединительной связи между закрылками удерживается соответственно другим регулируемым закрылком, так что нагрузка дефектного регулируемого закрылка переносится в соседний регулируемый закрылок.
В этой системе обеспечения большой подъемной силы вторичная соединительная связь между закрылками образует второй путь нагружения на тот случай, если исполнительный механизм откажет, то есть будет иметь дефект.В нормальном режиме система удерживается в нужном положении посредством тормозов в центральном приводе. Если, например, происходит излом трансмиссионного вала, система останавливается расположенными снаружи в правом и левом крыле аварийными тормозами («тормоза на концах крыльев» ("wing tip brakes")).
Задача изобретения состоит в том, чтобы предложить систему приведения в действие по меньшей мере одного регулируемого закрылка самолета, а также способ проверочного испытания системы приведения в действие закрылков, с помощью которого может быть эффективным образом улучшена надежность системы приведения в действие закрылков.
Эта задача решена посредством признаков независимых пунктов формулы изобретения. Другие конструктивные варианты указаны в ссылающихся на них зависимых пунктах.
Однако, изобретение применимо, в общем, к регулируемым закрылкам самолета, а также к системам, в которых передача усилия на регулируемые закрылки происходит гидравлически или электрически и, предпочтительно, через центральный двигатель. Требование заключается в том, чтобы никакая отдельная ошибка не могла привести к отказу исполнительного механизма.
В общем, в системе согласно изобретению и способе согласно изобретению может быть предусмотрено, что регулируемые закрылки могут управляться и приводиться в действие приводным устройством системы и приводным устройством системы независимо друг от друга. В этом случае в системе с соответственно двумя регулируемыми закрылками на каждом крыле может быть предусмотрено, что они могут управляться и приводиться в действие приводным устройством системы и приводным устройством системы независимо друг от друга. Прежде всего, внутренний посадочный закрылок может приводиться в движение независимо от внешнего, а внешний - независимо от внутреннего регулируемого закрылка.
При этом приведение в действие закрылков может происходить, например, с помощью управляемых электрически исполнительных сервомеханизмов и связанных с ними цилиндров исполнительного механизма, которые приводятся в действие посредством гидравлической системы.
Согласно изобретению может быть также предусмотрено механическое устройство передачи привода, прежде всего в виде приводного вала, для передачи выходной мощности приводного двигателя на исполнительные устройства и соединительная механика между устройством передачи привода и регулируемым закрылком, далее называемое устройством соединения с закрылком. При этом система может быть выполнена таким образом, что она может управлять по меньшей мере одним регулируемым закрылком, который может управляться системой для приведения в действие закрылков согласно изобретению, и может производить компенсацию ошибки в соединительной механике между проходящим от центрального двигателя вдоль крыла приводным валом и регулируемым закрылком, далее называемой устройством соединения с закрылком, независимо, то есть в состоянии механического разъединения с другим регулируемым закрылком.
Регулируемые закрылки системы согласно изобретению и способу могут быть, прежде всего, закрылками для обеспечения большой подъемной силы.
Прежде всего, изобретение представляет собой решение для случая, в котором в связи с системными требованиями, такими как, например, возможность установки различных углов атаки разных закрылков крыла, не предусмотрена вторичная соединительная связь между закрылками.
В способе приведения в действие по меньшей мере одного регулируемого закрылка на соответственно одном крыле самолета согласно изобретению речь идет об оценке работоспособности и/или реконфигурации и/или компенсации ошибок системы приведения в действие по меньшей мере одного регулируемого закрылка. Регулируемый закрылок приводится в действие по меньшей мере двумя устройствами соединения с закрылком с соответственно одним исполнительным устройством, при этом по меньшей мере на одном исполнительном устройстве на каждый регулируемый щиток расположено тормозное устройство, при приведении в действие которого может быть зафиксировано установленное состояние соответствующего исполнительного устройства в работе. Для оценки работоспособности и/или для реконфигурации регулируемого закрылка предусмотрены, прежде всего, следующие стадии:
- приведение в действие каждого тормозного устройства регулируемого закрылка по отдельности,
- затем приведение в действие исполнительного устройства посредством приводного двигателя,
- присвоение состояния «дефектное» присоединенным к регулируемому закрылку устройствам соединения с закрылком и/или прекращение приведения в действие соответствующего регулируемого закрылка при изменении после этого установленного состояния регулируемого закрылка на предварительно определенную величину.
За счет присвоения состояния «дефектное» производится оценка работоспособности регулируемого закрылка, включая приданные ему устройства соединения с закрылком и исполнительное устройство. В результате прекращения приведения в действие соответствующего регулируемого закрылка также производится реконфигурация регулируемого закрылка.
Способ предусмотрен, прежде всего, для системы приведения в действие по меньшей мере одного регулируемого закрылка на соответственно одном крыле самолета. В способе может быть дополнительно предусмотрено:
- при «недефектном» состоянии устройств соединения с закрылком регулируемого закрылка активирование каждого тормозного устройства,
- сравнение заданной команды приводного двигателя и измеренного датчиком состояния привода установленного состояния, и
- при превышении разницы прекращение приведения в действие соответствующего регулируемого закрылка.
Кроме того, в способе согласно изобретению могут быть предусмотрены дополнительные стадии:
- проведение сравнения для определения разницы между установленным по команде на тормозном устройстве заданным рабочим состоянием торможения и определенным рабочим состоянием торможения,
- при возникновении предварительно определенной разницы на тормозном устройстве присвоение устройствам соединения с закрылком одного регулируемого закрылка состояния «дефектное» и/или прекращение приведения в действие соответствующего регулируемого закрылка.
Кроме того, согласно изобретению предусмотрена система приведения в действие по меньшей мере одного регулируемого закрылка на соответственно одном крыле самолета, которая имеет:
- по меньшей мере два устройства соединения с закрылком с соответственно одним исполнительным устройством, из которых соответственно одно в соответственно одной из двух расположенных на удалении друг от друга при рассмотрении в направлении размаха крыла областей регулируемого закрылка соединено с последним,
- тормозное устройство по меньшей мере на одном исполнительном устройстве на каждый регулируемый закрылок, приведением в действие которого может быть зафиксировано установленное состояние соответствующего исполнительного устройства,
- приводное устройство системы с приводным двигателем, устройствами передачи привода, которые соединяют приводной двигатель с исполнительными устройствами, чтобы передавать выходную мощность приводного двигателя на исполнительные устройства, и датчиком состояния привода для определения установленного состояния приводного двигателя,
- датчик тормозного контакта, который расположен по меньшей мере на одном тормозном устройстве регулируемого закрылка для определения состояния тормозного контакта тормозного устройства,
- управляющее устройство с управляющей функцией для передачи командных сигналов на приводное устройство системы и предписания заданных состояний тормозного контакта тормозным устройствам, с устройством для приема сигналов от сенсорных устройств исполнительных устройств и функцией реконфигурации.
Прежде всего, функция реконфигурации имеет функцию, с помощью которой может быть приведено в действие каждое тормозное устройство или могут быть приведены в действие все приданные регулируемому закрылку тормозные устройства, затем посредством приводного двигателя приводится в действие исполнительное устройство, и при определении изменения установленного состояния посредством датчика состояния привода на предварительно определенную величину соединенным с регулируемым закрылком устройствам соединения с закрылком или тормозным устройствам присваивается состояние «дефектное».
В системе управляющее устройство может быть отрегулировано так, что регулируемый закрылок уже при одном тормозном устройстве с состоянием «дефектное» более не управляется или не приводится в действие.
Устройства передачи привода могут иметь управляющую функцию для управления каждым исполнительным устройством и иметь электрическую или гидравлическую связь приводного двигателя для передачи приводной мощности.
При этом устройства передачи привода могут иметь приводные валы для механического соединения приводного двигателя с исполнительными устройствами, так что исполнительное движение приводного двигателя механически, например через приводные валы, передается на присоединенные исполнительные устройства. Кроме того, функция реконфигурации имеет функцию, с помощью которой при недефектном состоянии может быть активировано каждое тормозное устройство, и проводится сравнение заданной команды приводного двигателя и измеренного датчиком состояния привода установленного состояния, и при превышении разницы управление соответствующим регулируемым закрылком прекращается.
Кроме того, функция реконфигурации может иметь: сравнительную функцию для определения разницы между установленным командой на тормозном устройстве заданным рабочим состоянием тормоза и определенным рабочим состоянием тормоза, и функцию идентификации ошибки, с помощью которой при возникновении предварительно определенной разницы на тормозном устройстве ему присваивается состояние «дефектное». При этом функция реконфигурации может быть устроена таким образом, что при присвоении состояния «дефектное» одному тормозному устройству управление этим тормозным устройством прекращается. В качестве альтернативы или дополнительно функция реконфигурации может быть устроена таким образом, что при присвоении состояния «дефектное» одному тормозному устройству управление устройством соединения с закрылком, которому придано определенное как дефектное тормозное устройство, прекращается.
В вышеприведенных вариантах системы согласно изобретению последняя может быть выполнена таким образом, что соединенные с регулируемым закрылком исполнительные приводы приводятся в действие приводным двигателем и могут управляться управляющим устройством по отдельности для приведения в действие регулируемого закрылка. Может быть также предусмотрено, что соединенные с регулируемым закрылком исполнительные приводы могут приводиться в действие приводным двигателем в виде группы, то есть несколько соединенных с регулируемым закрылком исполнительных приводов соединены с приводным двигателем.
Кроме того, система согласно изобретению может быть выполнена таким образом, что исполнительные устройства приводятся в действие центральным приводным двигателем, при этом устройства передачи привода являются приводными валами.
Датчик тормозного контакта может быть интегрирован в тормозное устройство. Прежде всего, датчик тормозного контакта может быть установлен как датчик приближения объекта для регистрации расстояния между двумя тормозными средствами, например, действующими друг против друга тормозными дисками, при этом одно тормозное средство установлено жестко на закрылке, а другое тормозное средство установлено жестко на основном крыле.
Датчик тормозного контакта может быть реализован в виде датчика для регистрации исполнительного движения и функционально связанной с ним моделью приведения в действие тормоза для определения мгновенного состояния тормозного контакта тормозного устройства.
В конструктивных вариантах осуществления системы согласно изобретению одно или несколько исполнительных устройств могут иметь два пути нагружения или механизма передачи усилия для соединения приводного вала с регулируемым закрылком.
Далее предпочтительные примеры осуществления изобретения описываются на фигуре 1, на которой показано схематическое изображение одного конструктивного варианта системы обеспечения большой подъемной силы согласно изобретению в качестве примера для системы приведения в действие закрылков согласно изобретению.
В качестве примера осуществления изобретения на фигуре 1 показана система 1 обеспечения большой подъемной силы для приведения в действие двух посадочных закрылков на соответственно одном из двух основных крыльев самолета (не показан) посредством приводного устройства 3 системы с приводным двигателем 4 и управляющим устройством для управления приводным устройством системы. Согласно изобретению, в общем случае, может быть предусмотрен только один регулируемый закрылок на крыло, который управляется центральным приводом 3. В данном случае центральным приводом 3 приводятся в действие два регулируемых закрылка S11, S12, S21, S22 на крыло. Приводное устройство может также быть частью приводного устройства системы. Таким образом, в качестве примера регулируемых закрылков в общей сложности имеется четыре посадочных закрылка S11, S12, S21, S22, которые могут управляться системой приведения в действие согласно изобретению.
К каждому регулируемому закрылку S11, S12, S21, S22 присоединено по меньшей мере два устройства 11, 12, 13, 14 соединения с закрылком с соответственно одним исполнительным устройством 30. При расположении двух устройств 11, 12, 13, 14 соединения с закрылком на каждый регулируемый закрылок соответственно одно присоединено к нему в соответственно одной из двух расположенных при рассмотрении в направлении размаха крыла на удалении друг от друга областей регулируемого закрылка S11, S12, S21, S22. Устройства передачи привода для передачи выходной мощности приводного двигателя 4 на устройства 11, 12, 13, 14 соединения с закрылком выполнены в виде приводных валов А1, А2. Приводные валы А1, А2 составлены из нескольких частей, которые соединены между собой соединительными устройствами К или передающими устройствами, например, чтобы соответствовать более длинным участкам пути передачи или чтобы осуществлять изменения направления вдоль крыла или чтобы соединять приводной вал с соответствующими устройствами 11, 12, 13, 14 соединения с закрылком.
Представленная система 1 приведения в действие имеет привод 3 системы в виде, например, гидравлического двигателя, который приводит в действие проходящий к каждому крылу приводной вал А1, А2. Каждый приводной вал А1, А2 соединяет привод 3 системы с устройствами соединения с закрылком, которые преобразуют вращательное движение приводного вала в исполнительное движение для регулирования закрылка. В представленном на фигуре 1 конструктивном варианте осуществления на первой стороне между первым приводным валом А1 и закрылками S11 или же S12 предусмотрены два устройства 11, 12 соединения с закрылком для приведения в действие первого закрылка S11 и еще два устройства 13, 14 соединения с закрылком для приведения в действие второго закрылка S12. Кроме того, на второй стороне между вторым приводным валом А2 и закрылками S21 или же S22 предусмотрены два устройства 21, 22 соединения с закрылком для приведения в действие первого закрылка S21 и еще два устройства 23, 24 соединения с закрылком для приведения в действие второго закрылка S22. Устройство соединения с закрылком передает вращательное движение соответствующего приводного вала А1, А2 в соответствующее движение регулирования закрылка.
Согласно изобретению предусмотрен по меньшей мере один регулируемый закрылок S11, S12 или S21, S22 на крыло. В показанном примере осуществления два регулируемых закрылка на крыло приводятся в действие соответственно двумя устройствами соединения с закрылком. Для этого каждое устройство соединения с закрылком имеет исполнительное устройство 30. Приводной вал А1, А2 может быть соединен с исполнительным устройством 30 прямо или посредством соединительной механики (не показана). Кроме того, исполнительное устройство 30 может быть соединено с закрылком S11, S12, S21, S22 посредством исполнительной механики 33.
Кроме того, по меньшей мере одно из подсоединенных к регулируемому закрылку S11, S12, S21, S22 устройств 11, 12, 13, 14 соединения с закрылком имеет тормозное устройство (не показано), приведением в действие которого фиксируется установленное состояние соответствующего регулируемого закрылка. Прежде всего, каждое устройство 11, 12, 13, 14 соединения с закрылком может тем самым иметь такое тормозное устройство.
Таким образом, система для приведения в действие по меньшей мере одного регулируемого закрылка на соответственно одном крыле самолета имеет:
- по меньшей мере два устройства 11, 12, 13, 14; 21, 22, 23, 24 соединения с закрылком с соответственно одним исполнительным устройством 30, из которых соответственно одно в соответственно одной из двух расположенных на расстоянии друг от друга при рассмотрении в направлении размаха крыла областей регулируемого закрылка S11, S12, S21, S22 соединено с последним,
- тормозное устройство по меньшей мере на одном исполнительном устройстве 30 на каждый регулируемый закрылок, приведением в действие которого может быть зафиксировано установленное состояние соответствующего исполнительного устройства 30,
- приводное устройство 3 системы с приводным двигателем 4, устройствами А1, А2 передачи привода, которые соединяют приводной двигатель 4 с исполнительными приводными устройствами 30 для передачи выходной мощности приводного двигателя на исполнительные устройства 30, и датчиком состояния привода для определения установленного состояния приводного двигателя 4,
- датчик тормозного контакта, который расположен по меньшей мере на одном тормозном устройстве регулируемого закрылка для определения состояния тормозного контакта тормозного устройства,
- управляющее устройство с управляющей функцией для передачи командных сигналов на приводное устройство 3 системы и предписания заданных состояний тормозного контакта тормозным устройствам с устройством для приема сигналов от сенсорных устройств исполнительных устройств.
Кроме того, управляющее устройство имеет функцию реконфигурации.
Система согласно изобретению также имеет управляющее устройство для установки по команде заданных регулируемых состояний регулируемых закрылков, которое имеет: управляющую функцию для передачи командных сигналов на приводное устройство 3 системы и установки по команде заданных состояний тормозного контакта на тормозные устройства, устройство для приема сигналов сенсорных устройств исполнительных устройств и функцию реконфигурации.
Исполнительное устройство 30 может быть выполнено в виде исполнительного привода с одинарным путем нагружения или в виде исполнительного привода с двойным путем нагружения («привод закрылка с двойным путем нагружения»).
Прежде всего, исполнительный привод с двойным путем нагружения может быть выполнен таким образом, что первый путь нагружения реализован в виде механики передачи усилия, которая при приведении в действие устройств А1, А2 передачи привода передает их движение на каждый регулируемый закрылок и при этом может быть выполнена, например, в виде передачи. Кроме того, второй путь нагружения может быть выполнен в виде механической обратной связи от регулируемого закрылка к соответствующему устройству А1, А2 передачи привода, так что при отказе первого пути нагружения еще имеется механическая связь между регулируемым закрылком и соответствующим устройством А1, А2 передачи привода, и регулируемый закрылок остается механически соединенным с основным крылом. Тогда отказ исполнительного механизма может произойти за счет определения посредством функции реконфигурации изменения установленного состояния посредством датчика состояния привода на предварительно определенную величину или более чем на предварительно определенную величину. Изменение установленного состояния может быть, прежде всего, дано определением асимметричных, то есть превышающих предварительно определенную величину различных изменений установленного состояния в устройствах передачи привода крыльев. В качестве альтернативы может быть также предусмотрено, что такой дефект может быть также определяемым расположенным в этой области на регулируемом закрылке или на устройстве передачи привода сенсорным устройством.
Исполнительный привод с двойным путем нагружения может быть выполнен в виде передачи с двойным путем нагружения, прежде всего в виде шарикового винта. Принимая во внимание монтажное пространство исполнительного привода с двойным путем нагружения, может быть благоприятным его выполнение в виде передачи вращательного движения с двойным путем нагружения. Передача вращательного движения с двойным путем нагружения может быть образована, прежде всего, из двух идентичных передач, при этом одна передача предусмотрена в качестве вторичной передачи, которая следует за движением другой передачи как первичной передачи. При этом важно, что вторичная передача в нормальном режиме не воспринимает никакой нагрузки. Это может быть осуществлено посредством придания вторичной передаче определенной величины люфта. Для исполнительного устройства могут быть применены и другие конструктивные варианты исполнительного привода с двойным путем нагружения.
При применении исполнительного привода с двойным путем нагружения в системе согласно изобретению она может быть выполнена, прежде всего, таким образом, что функция реконфигурации приводит в действие тормозное устройство и фиксирует регулируемый закрылок в его мгновенном положении, если определяется дефект в соответствующем устройстве соединения с закрылком или соответствующем исполнительном устройстве.
При выполнении исполнительного устройства в качестве исполнительного привода с одинарным путем нагружения или в качестве исполнительного привода с двойным путем нагружения исполнительное устройство может быть оснащено приданным тормозному устройству устройством блокировки по крутящему моменту, с помощью которого устанавливается, когда на входе передачи крутящий момент отсутствует. Управляющее устройство может быть функционально соединено с устройством блокировки по крутящему моменту таким образом, что отсутствие крутящего момента, прежде всего при регулировании устройства передачи привода, активирует тормозное устройство, так что активируется функция блокировки по крутящему моменту или функция «No-back». При этом функция блокировки по крутящему моменту выполнена в виде тормозного устройства, которое удерживает в определенном положении передачу или исполнительное устройство. Предпочтительно, это устройство блокировки по крутящему моменту выполнено таким образом, что оно может блокировать в обоих направлениях вращения. В качестве альтернативы или дополнительно передача может иметь функцию ограничения крутящего момента, которая предусмотрена таким образом, что при превышении предварительно определенного или установленного крутящего момента приводится в действие тормоз.
В качестве альтернативы исполнительное устройство 30 может выполнено так, что оба исполнительных механизма активно передают исполнительное (установочное) движение приводного вала на каждый регулируемый закрылок, так что при дефекте или отказе одного из исполнительных механизмов, другой исполнительный механизм может один взять на себя функцию приведения в действие исполнительного устройства 30 для соответствующего регулируемого закрылка. Дефект в одном из параллельно активно действующих в исполнительном устройстве исполнительных механизмов может происходить, например, также посредством определения указанных асимметричных изменений установленного состояния или в качестве альтернативы или дополнительно с помощью одного из расположенных в этой области на регулируемом закрылке или устройстве передачи привода сенсорного устройства.
Управляющее устройство может быть отрегулировано таким образом, что при возникновении указанных отклонений от величин датчика соединенным с регулируемым закрылком устройствам 11, 12, 13, 14 соединения с закрылком присваивается состояние «дефектное». Дополнительно или в качестве альтернативы может быть предусмотрено, что соответствующий регулируемый закрылок более не приводится в действие.
Функция реконфигурации согласно изобретению имеет функцию, с помощью которой каждое тормозное устройство регулируемого закрылка может приводиться в действие по отдельности, затем посредством приводного двигателя приводится в действие исполнительное устройство, и при определении посредством датчика состояния привода изменения установленного состояния на предварительно определенную величину присоединенным к регулируемому закрылку устройствам 11, 12, 13, 14 соединения с закрылком или тормозным устройствам присваивается состояние «дефектное», или тормозное устройство рассматривается системой как дефектное. Таким образом, на этой стадии способа или же с помощью этой функции происходит тест работоспособности соответствующего тормозного устройства. Таким образом, активно приводится в действие одно тормозное устройство или несколько тормозных устройств, которые подсоединены к регулируемому закрылку, а затем включается приводной двигатель 4. Если при этом с помощью сенсорного устройства посредством функции реконфигурации устанавливается изменение установленного состояния, выходящее за пределы предварительно определенной заданной величины, это означает, что тормозное устройство, например, в результате износа является недостаточно работоспособным, и уже более не может перенять назначенную ему предохранительную функцию по фиксации регулируемого закрылка. При этом сенсорным устройством может быть сенсорное устройство на приводном устройстве системы, то есть датчик состояния привода, или сенсорное устройство в расположенной на расстоянии от него области устройства передачи привода. Предпочтительно, тормозное устройство тестируется описанным образом по отдельности.
За счет обеспечения этого теста может быть явно повышена целостность системы при относительно низкой механической трудоемкости. Кроме того, с помощью этой меры согласно изобретению конструкция может быть рассчитана легче, так как система может быть рассчитана таким образом, что при обеспечении теста работоспособности для достижения требуемой целостности не нужно рассматривать случай ошибки, при котором тормозное устройство отказывает.
Кроме того, согласно изобретению может быть предусмотрена проверка функциональности исполнительного устройства. Для этого функция реконфигурации дополнительно может иметь сравнительную функцию для определения разницы между установленным по команде на одном тормозном устройстве заданным рабочим состоянием торможения и определенным рабочим состоянием торможения и функцию идентификации ошибки, с помощью которой при возникновении предварительно определенной разницы на одном тормозном устройстве ему присваивается состояние «дефектное». Согласно изобретению функциональный тест может проводиться чаще. Например, система согласно изобретению может быть устроена так, что этот функциональный тест проводится перед каждым полетом.
Согласно изобретению рабочее состояние торможения может быть определено с помощью датчика тормозного контакта, который, например, интегрирован в тормозное устройство. Прежде всего, датчик тормозного контакта может быть датчиком приближения объекта для регистрации расстояния между двумя тормозными средствами, например двумя действующими друг против друга тормозными дисками, при этом одно тормозное средство жестко установлено на закрылке, а другое тормозное средство жестко установлено на основном крыле. В качестве альтернативы или дополнительно датчик тормозного контакта может быть реализован в виде датчика для регистрации установочного движения и функционально связанной с ним модели приведения в действие тормоза для определения мгновенного состояния тормозного контакта тормозного устройства.
Управляющее устройство имеет устройство для передачи командных сигналов на исполнительные устройства для приведения в действие исполнительных устройств и соответственно приданное тормозное устройство для приведения в действие тормозного устройства. В результате приведения в действие исполнительных устройств изменяется установленное состояние регулируемого закрылка, с которым соединено исполнительное устройство, то есть закрылок убирается или выпускается. Чтобы убрать или выпустить регулируемый закрылок в соответствии с назначением, оба или все связанные с соответствующим регулируемым закрылком исполнительные устройства должны быть одновременно приведены в действие управляющим устройством таким образом, чтобы исполнительные устройства перемещали регулируемый закрылок в соответствующей назначению ориентации относительно основного крыла.
Прежде всего, при обеспечении устройств А1, А2 передачи привода в виде приводных валов для механического соединения приводного двигателя с исполнительными устройствами функция реконфигурации, кроме того, может иметь функцию, с помощью которой при недефектном состоянии может быть активировано каждое тормозное устройство, и проводится сравнение заданной команды приводного двигателя 4 и замеренного датчиком состояния привода установленного состояния, и при превышении разницы управление соответствующим регулируемым закрылком прекращается.
Система согласно изобретению с управляющим устройством может иметь исполнительные устройства с одинарным путем нагружения или с двойным путем нагружения. Система может также иметь примененную на одном регулируемом закрылке или внутри системы комбинацию исполнительных устройств одинарным или двойным путем нагружения. При этом согласно изобретению происходит активное тестирование системы таким образом, что при обеспечении одного исполнительного устройства с двойным путем нагружения может быть проверена возможность использования второго пути нагружения.
Согласно изобретению можно отказаться от сенсорных устройств, и прежде всего, датчиков положения на закрылке для обнаружения ошибки, для того чтобы тем не менее выполнить обычное требование целостности. И такого элемента, как «соединительная связь», больше не требуется. Может также отпасть необходимость в «тормозах на концах крыльев» ("wing tip brakes"). Может также отпасть необходимость в относительно сложных алгоритмах контроля, так как функция реконфигурации согласно изобретению выполнена относительно простой. Однако по меньшей мере на одном исполнительном устройстве регулируемого закрылка необходимо предусмотреть один датчик тормозного контакта.
Для улучшения целостности системы согласно изобретению она может иметь сенсорные устройства, из которых соответственно одно расположено в расположенных в направлении размаха крыла относительно фюзеляжа самолета на расстоянии друг от друга областях регулируемого закрылка и/или устройств для передачи мощности для определения установленного состояния. При этом установленное состояние может быть, прежде всего, изменением установленного состояния регулируемого закрылка или соединений передачи привода или устройств передачи привода. Также быть могут предусмотрены дополнительные сенсорные устройства для регистрации положения одного или нескольких регулируемых закрылков и быть функционально связаны с управляющим устройством. При этом эта информация датчиков может быть применена для изменения установленного состояния регулируемого закрылка или соединений передачи привода или устройств передачи привода вместо или дополнительно к данным датчика состояния привода приводного устройства 3 системы. Прежде всего, это может быть предусмотрено тогда, когда устройства А1, А2 передачи привода имеют приводные валы для механического соединения приводного двигателя с исполнительными устройствами. При применении сенсорных устройств в расположенных в направлении размаха крыла относительно фюзеляжа самолета на расстоянии друг от друга областях регулируемого закрылка и/или устройств для передачи мощности вместо датчика состояния привода присвоение состояния «дефектное» соответствующим устройствам 11, 12, 13, 14 соединения с закрылком или тормозным устройствам происходит посредством определенных этими сенсорными устройствами изменений установленного состояния.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ С СИСТЕМОЙ УВЕЛИЧЕНИЯ ПОДЪЕМНОЙ СИЛЫ | 2010 |
|
RU2494931C2 |
| ПОСАДОЧНЫЙ ЗАКРЫЛОК КРЫЛА САМОЛЕТА С УСТРОЙСТВОМ ДЛЯ ОБНАРУЖЕНИЯ ОШИБОК ЗАКРЫЛКА | 2006 |
|
RU2423295C2 |
| ПОВЕРХНОСТЬ УПРАВЛЕНИЯ ЗАДНЕЙ КРОМКОЙ КРЫЛА САМОЛЕТА | 2006 |
|
RU2405715C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ОБТЕКАЕМОЕ ТЕЛО И СИСТЕМА ОБЕСПЕЧЕНИЯ БОЛЬШОЙ ПОДЪЕМНОЙ СИЛЫ С ТАКИМ ОБТЕКАЕМЫМ ТЕЛОМ | 2009 |
|
RU2494923C2 |
| КРЫЛО САМОЛЕТА, А ТАКЖЕ СТРУКТУРА КРЫЛА С УСТРОЙСТВОМ ДЛЯ ОКАЗАНИЯ ВЛИЯНИЯ НА ПОТОК | 2010 |
|
RU2488521C2 |
| СИСТЕМА ЩИТКОВ НА КРЫЛЕ САМОЛЕТА С ЖЕСТКИМ КРЫЛОМ | 2004 |
|
RU2346851C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ АЭРОСТАТА | 1999 |
|
RU2238217C2 |
| СИСТЕМА ПРИВОДА ПОСАДОЧНЫХ ЗАКРЫЛКОВ | 2006 |
|
RU2399554C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ЗАКРЫЛКОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2728236C2 |
Изобретение относится к области авиации, в частности к системам управления аэродинамическими поверхностями самолета. Способ и система для осуществления способа приведения в действие по меньшей мере одного регулируемого закрылка на соответственно одном крыле самолета. Закрылок приводится в действие по меньшей мере двумя устройствами (11, 12, 13, 14) соединения с закрылком с соответственно одним исполнительным устройством (30). Для каждого регулируемого закрылка, по меньшей мере на одном исполнительном устройстве (30), расположено тормозное устройство. Приведением в действие тормозного устройства может быть зафиксировано установленное состояние соответствующего исполнительного устройства (30) со следующими стадиями: приведение в действие каждого тормозного устройства по отдельности; затем приведение в действие исполнительного устройства с помощью приводного двигателя; прекращение приведения в действие соответствующего регулируемого закрылка при изменении установленного состояния регулируемого закрылка на предварительно определенную величину. Повышается надежность и управляемость самолета. 2 н. и 15 з.п. ф-лы, 1 ил.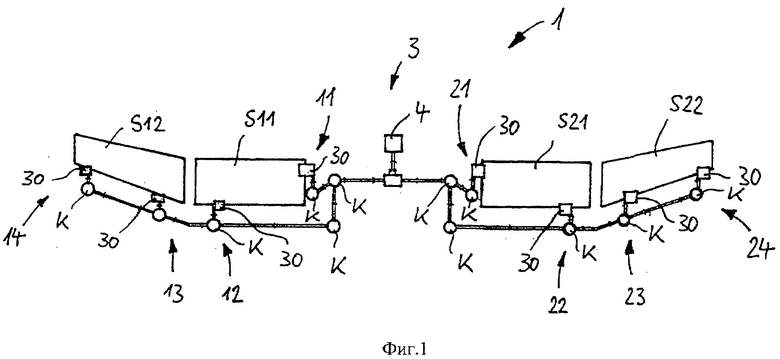
1. Способ приведения в действие по меньшей мере одного регулируемого закрылка на соответственно одном крыле самолета, который приводится в действие по меньшей мере двумя устройствами (11, 12, 13, 14) соединения с закрылком с соответственно одним исполнительным устройством (30), при этом по меньшей мере на одном исполнительном устройстве (30) на каждый регулируемый закрылок расположено тормозное устройство, приведением в действие которого может быть зафиксировано установленное состояние соответствующего исполнительного устройства (30),
со следующими стадиями:
приведение в действие каждого тормозного устройства регулируемого закрылка по отдельности;
затем приведение в действие исполнительного устройства с помощью приводного двигателя;
прекращение приведения в действие исполнительного устройства соответствующего регулируемого закрылка при изменении установленного состояния регулируемого закрылка на предварительно определенную величину.
2. Способ по п.1, отличающийся тем, что он включает в себя дополнительные стадии:
активирование каждого тормозного устройства при недефектном состоянии устройств соединения с закрылком регулируемого закрылка;
сравнение заданной команды приводного двигателя (4) и измеренного датчиком состояния привода установленного состояния; и
прекращение приведения в действие соответствующего регулируемого закрылка при превышении разницы.
3. Способ по п.1, отличающийся тем, что он включает в себя дополнительные стадии:
проведение сравнения для определения разницы между установленным по команде на тормозном устройстве заданным рабочим состоянием тормоза и определенным рабочим состоянием тормоза;
завершение приведения в действие соответствующего регулируемого закрылка при возникновении предварительно определенной разницы на тормозном устройстве.
4. Система приведения в действие по меньшей мере одного регулируемого закрылка на соответственно одном крыле самолета, которая имеет:
по меньшей мере два устройства (11, 12, 13, 14) соединения с закрылком с соответственно одним исполнительным устройством (30), из которых соответственно одно в соответственно одной из двух областей регулируемого закрылка (S11, S12, S21, S22), расположенных на удалении друг от друга при рассмотрении в направлении размаха крыла, присоединено к регулируемому закрылку;
тормозное устройство по меньшей мере на одном исполнительном устройстве (30) на каждый регулируемый закрылок, приведением в действие которого может быть зафиксировано установленное состояние соответствующего исполнительного устройства (30);
приводное устройство (3) системы с приводным двигателем (4), устройствами (A1, А2) передачи привода, которые соединяют приводной двигатель (4) с исполнительными устройствами (30) для передачи выходной мощности приводного двигателя (4) на исполнительные устройства (30), и с датчиком состояния привода для определения установленного состояния приводного двигателя (4);
датчик тормозного контакта, который расположен по меньшей мере на одном тормозном устройстве регулируемого закрылка для определения состояния тормозного контакта тормозного устройства;
управляющее устройство с управляющей функцией для передачи командных сигналов на приводное устройство (3) системы и для установки по команде заданных состояний тормозного контакта на тормозные устройства, с устройством для приема сигналов сенсорных устройств исполнительных устройств и функцией реконфигурации,
при этом функция реконфигурации имеет функцию, с помощью которой каждое тормозное устройство регулируемого закрылка может быть приведено в действие по отдельности, затем с помощью приводного двигателя приводит в действие исполнительное устройство, и при определении посредством датчика состояния привода изменения установленного состояния на предварительно определенную величину присваивает присоединенным к регулируемому закрылку устройствам (11, 12, 13, 14) соединения с закрылком или тормозным устройствам состояние «дефектное».
5. Система по п.4, отличающаяся тем, что управляющее устройство настроено таким образом, что оно более не приводит в действие соответствующий регулируемый закрылок.
6. Система по п.4, отличающаяся тем, что устройства (A1, А2) передачи привода имеют управляющую функцию для управления каждым исполнительным устройством и имеют электрическую или гидравлическую связь приводного двигателя для передачи приводной мощности.
7. Система по п.4, отличающаяся тем, что устройства (A1, А2) передачи привода имеют приводные валы для механической связи приводного двигателя с исполнительными устройствами, а функция реконфигурации, кроме того, имеет функцию, с помощью которой при недефектном состоянии может быть приведено в действие каждое тормозное устройство, и проводится сравнение заданной команды приводного двигателя (4) и измеренного датчиком состояния привода регулируемого состояния, и при превышении разницы управление соответствующим регулируемым закрылком прекращается.
8. Система по п.4, отличающаяся тем, что функция реконфигурации дополнительно имеет сравнительную функцию для определения разницы между установленным по команде на тормозном устройстве заданным рабочим состоянием торможения и определенным рабочим состоянием торможения и функцию идентификации ошибки, с помощью которой при возникновении предварительно определенной разницы на тормозном устройстве ему присваивается состояние «дефектное».
9. Система по п.8, отличающаяся тем, что при присвоении состояния «дефектное» тормозному устройству управление этим тормозным устройством прекращается.
10. Система по п.8, отличающаяся тем, что при присвоении состояния «дефектное» тормозному устройству, управление устройством соединения с закрылком, которому соответствует определенное как дефектное тормозное устройство, прекращается.
11. Система по п.4, отличающаяся тем, что соединенные с регулируемым закрылком исполнительные приводы могут приводиться в действие приводным двигателем и для приведения в действие регулируемого закрылка по отдельности управляться управляющим устройством.
12. Система по п.4, отличающаяся тем, что соединенные с регулируемым закрылком исполнительные приводы могут приводиться в действие приводным двигателем в виде группы.
13. Система по п.4, отличающаяся тем, что исполнительные устройства (30) приводятся в действие центральным приводным двигателем (3), при этом устройства передачи привода являются приводными валами (A1, А2).
14. Система по п.4, отличающаяся тем, что датчик тормозного контакта интегрирован в тормозное устройство.
15. Система по п.4, отличающаяся тем, что датчик тормозного контакта является датчиком приближения объекта для регистрации расстояния между двумя тормозными средствами.
16. Система по п.4, отличающаяся тем, что датчик тормозного контакта имеет датчик для регистрации исполнительного движения и функционально связанную с ним модель приведения в действие тормоза для определения мгновенного состояния тормозного контакта тормозного устройства.
17. Система по п.4, отличающаяся тем, что исполнительное устройство имеет два пути нагружения для соединения приводного вала (A1, А2) с регулируемым закрылком.
| WO 2007068413 А2, 21.06.2007 | |||
| WO 2005047108 А1, 26.05.2005 | |||
| US 5719566 А, 17.02.1998 | |||
| US 3662550 А, 16.05.1972 | |||
| US 4521060 А, 04.06.1985. |

