Область техники, к которой относится изобретение
Изобретение относится к самолету с системой увеличения подъемной силы.
Уровень техники
Из уровня техники известно, что приводы подвижно установленных элементов механизации крыла, например закрылков или предкрылков, входящих в состав систем увеличения подъемной силы современных гражданских самолетов, а также военных транспортных самолетов, управляются и контролируются посредством центральных цифровых вычислителей. Эти вычислители, вместе с другими компьютерами, такими как бортовой компьютер системы управления полетом или компьютер технического обслуживания, находятся в ячейках бортовых вычислителей в так называемом отсеке электронного оборудования (авионики), расположенном вблизи кабины самолета. Благодаря этому бортовые компьютеры, в частности компьютеры, важные для обеспечения безопасности полета, собраны в одном пространстве, одинаково кондиционируются и снабжаются электроэнергией. Размещение указанных компьютеров в одном и том же отсеке электронного оборудования или в едином пространстве дает то преимущество, что единые атмосферные условия, создающие технические предпосылки для соблюдения норм в отношении, например, интенсивности отказов этих компьютеров, необходимо создавать только для одного отсека.
Соответственно этому все компоненты системы увеличения подъемной силы, находящиеся за пределами отсека электронного оборудования связаны посредством аналоговых сигнальных соединений с управляющим компьютером системы. Так, например, приводные двигатели системы увеличения подъемной силы, предусмотренные для перемещения закрылков или предкрылков, рычаг управления (управления предкрылками/закрылками), а также датчики для контроля компонентов и системы функционально связаны посредством аналоговых сигнальных соединений с управляющим компьютером для управления закрылками и фиксирующими их тормозами. Это гарантирует соответствие функциональным требованиям, предъявляемым к системе увеличения подъемной силы, в частности к ее управляющему компьютеру, поскольку сигналы управления и контроля передаются непосредственно между устройствами ввода системы увеличения подъемной силы, например рычагом управления, и управляющим компьютером системы увеличения подъемной силы, а также между управляющим компьютером и приводными двигателями или приводным устройством системы увеличения подъемной силы, и таким образом передача этих сигналов происходит с минимальным временным смещением. Благодаря описанному выше применению аналоговых линий передачи сигналов достигаются, в частности, преимущества в отношении реализации концепции безопасности, поскольку это минимизирует время задержки или запаздывание между возникновением ошибки, а также ее обнаружением и соответствующими функциональными реакциями в устройстве управления, такими как срабатывание фиксирующих и предохранительных тормозов, а значит, в случае неисправности за сравнительно короткое время может быть предпринято изменение конфигурации системы увеличения подъемной силы.
Раскрытие изобретения
Задачей изобретения является разработка самолета с системой увеличения подъемной силы, обеспечивающей выполнение требований безопасности к самолету эффективным и экономичным образом.
Эта задача решается признаками пункта 1 формулы изобретения. Варианты осуществления изобретения приведены в соответствующих зависимых пунктах формулы.
Объектом изобретения является самолет с системой увеличения подъемной силы, имеющий:
- систему управления полетом с компьютером управления полетом, установленным, например, в отсеке электронного оборудования самолета,
- по меньшей мере по одному элементу увеличивающей подъемную силу механизации крыла, установленному на каждой консоли крыла самолета с возможностью перемещения относительно нее, приводное устройство, связанное с элементом механизации крыла и выполненное таким образом, чтобы на основании команд управления перемещать элемент механизации крыла между убранным положением и выпущенным положением, и
- по меньшей мере один компьютер системы увеличения подъемной силы или устройство управления, который(-ое) связан(-о) с приводным устройством посредством аналогового канала передачи данных и который(-ое) содержит функцию управления для выработки команд управления, задающих положение элементов механизации крыла.
Устройство управления имеет цифровой интерфейс для связи устройства управления с компьютером управления полетом, чтобы принимать от него данные, относящиеся к режиму полета. Устройство управления имеет функцию, которая с использованием данных, относящихся к режиму полета, вырабатывает команды управления с целью приведения в действие соответствующего устройства управления на перемещение элемента механизации крыла, а также команд контроля и блокировки для приведения в действие тормозов соответствующего устройства управления для стопорения элементов механизации крыла в случае неисправности системы, для передачи этих команд управления в устройство управления и передает эти команды управления. Случаем неисправности системы может быть, например, отказ механизма перемещения элемента механизации крыла, например вследствие поломки центрального передаточного вала. Характеризующими режим полета данными являются данные, получаемые с помощью датчиков и касающиеся режима полета самолета либо выводимые из параметров режима полета, или могут быть данными режима полета, т.е. данными, описывающими режим полета. В качестве относящихся к режиму полета данных используются, в частности, текущая скорость самолета, угол атаки самолета, высота полета.
Предлагаемый в изобретении самолет или система увеличения подъемной силы такого самолета также имеет устройство ввода для ввода команд заданного положения элементов механизации крыла с целью перемещения последних, которое связано с устройством управления для передачи в него команд заданного положения элементов механизации крыла с целью перемещения последних. Устройство управления имеет функцию, которая с использованием принимаемых устройством ввода команд заданного положения элементов механизации крыла, а также относящихся к режиму полету данных вырабатывает с целью перемещения элементов механизации крыла команды управления для их передачи в устройство управления и передает эти команды. В предлагаемой в изобретении системе увеличения подъемной силы система управления полетом также может иметь функцию, в частности выполненную в виде функции безопасности, с помощью которой устройство управления приводится в действие, например для уборки элементов механизации крыла.
Предлагаемый в изобретении самолет также имеет датчики для регистрации положения элементов механизации крыла, связанные посредством аналоговых сигнальных линий с устройством управления для контроля или отслеживания положения элементов механизации крыла и/или работоспособности системы увеличения подъемной силы.
Предлагаемым в изобретении решением предусматривается, в частности, что:
- устройство ввода связано посредством цифрового канала передачи данных с устройством управления для передачи команд заданного положения элементов механизации крыла с целью перемещения последних, и
- устройство управления установлено в зоне размещения полезной нагрузки в фюзеляже самолета.
В одном варианте осуществления изобретения устройство управления системы увеличения подъемной силы установлено в зоне размещения полезной нагрузки в фюзеляже самолета и на участке фюзеляжа, который, глядя в продольном направлении фюзеляжа, проходит от места, которое, при взгляде вперед от передней стороны центроплана, находится на расстоянии, составляющем одну треть отрезка длины фюзеляжа, проходящего от передней стороны центроплана до носа фюзеляжа, до места, которое, при взгляде назад от задней стороны центроплана, находится на расстоянии, составляющем одну треть отрезка длины фюзеляжа, проходящего от задней стороны центроплана до конца фюзеляжа в хвосте самолета.
В одном варианте осуществления изобретения система увеличения подъемной силы может представлять собой систему механизации передней кромки крыла, включающую в себя перемещаемые элементы механизации передней кромки крыла и устройство управления, причем устройство управления системы механизации передней кромки крыла для обеспечения перемещения элементов механизации функционально связано с ними.
При этом, в частности, может быть предусмотрено, что устройство управления системы механизации передней кромки крыла установлено в зоне размещения полезной нагрузки в фюзеляже самолета и при этом на участке фюзеляжа, который, глядя в продольном направлении фюзеляжа, проходит от передней стороны центроплана до места, которое, при взгляде вперед от передней стороны центроплана, находится на расстоянии, составляющем одну треть отрезка длины фюзеляжа, проходящего от передней стороны центроплана до носа самолета.
В одном варианте осуществления изобретения система увеличения подъемной силы может представлять собой систему механизации задней кромки крыла, включающую в себя перемещаемые элементы механизации задней кромки крыла и устройство управления, причем устройство управления системы механизации задней кромки крыла для обеспечения перемещения элементов механизации функционально связано с ними.
При этом, в частности, может быть предусмотрено, что устройство управления системы механизации задней кромки крыла установлено в зоне размещения полезной нагрузки в фюзеляже самолета и при этом на участке фюзеляжа, который, глядя в продольном направлении фюзеляжа, проходит от задней стороны центроплана до места, которое, при взгляде назад от задней стороны центроплана, находится на расстоянии, составляющем одну треть отрезка длины фюзеляжа, проходящего от задней стороны центроплана до хвоста самолета.
Предлагаемое в изобретении решение предусматривает изменение традиционного расположения бортовых компьютеров системы управления полетом вместе с компьютерами системы увеличения подъемной силы, хотя существующие требования безопасности, предъявляемые к самолету, и связанные с ними процедуры допуска к эксплуатации исходят из центрального расположения этих компьютеров. Благодаря размещению компьютеров системы увеличения подъемной силы или устройства управления в зоне размещения полезной нагрузки в фюзеляже самолета отпадает, по сравнению с обычным расположением вычислителей, значительная часть протяженности кабелей для передачи аналоговых сигналов управления и контроля для покрытия расстояния между кабиной (т.е. отсеком электронного оборудования) и крылом.
В принципе, за счет предусмотренного изобретением подключения устройства ввода посредством цифрового канала передачи данных к устройству управления системы увеличения подъемной силы для передачи команд заданного положения элементов механизации крыла с целью перемещения последних повышаются затраты на интерфейс устройства ввода для преобразования сигналов датчиков, соответствующих перемещениям элементов механизации крыла, в цифровые данные, а функциональные характеристики, в частности, что касается скорости передачи или длительности передачи данных по соединению между устройствами ввода и устройством управления, снижаются, поскольку эти цифровые вводимые данные передаются по бортовой шине передачи данных самолета в рамках заданного протокола передачи. Однако это мероприятие позволяет сократить протяженность аналоговых кабелей для передачи аналоговых сигналов из устройства ввода в устройство управления. При этом, что касается передачи данных, изобретением для подачи вводимых данных от устройства ввода в информационную шину (шину данных) предусматриваются временные окна и частоты повторения, обусловливаемое которыми временное запаздывание является еще допустимым. При этом передача данных от устройства ввода должна быть согласована с передачей других передаваемых по информационной шине данных с учетом соответствующих временных условий.
В частности, согласно изобретению по меньшей мере одно устройство управления системы увеличения подъемной силы образовано компьютерами и аппаратными интерфейсами, выполненными на аппаратном уровне совместимыми между собой, в частности одинаковыми, для обеспечения взаимозаменяемости компьютеров с аппаратными интерфейсами между устройствами управления и/или в пределах устройств управления. Под аппаратными интерфейсами понимаются, в частности, гнезда электрических или сигнальных разъемов, выполненные совместимыми друг с другом или одинаковыми, благодаря чему в них можно вставлять штекеры одного типа для подключения предусмотренных в соответствующих случаях линий передачи сигналов и/или данных. При этом аппаратные интерфейсы, в частности для установления соединений, обеспечивающих обмен данными с компьютером системы управления полетом и/или с соответствующим приводным устройством, выполнены совместимыми друг с другом или одинаковыми.
Предлагаемый в изобретении самолет, обладающий рассмотренными выше признаками, может быть выполнен, в частности, по схеме с расположением двигателей на хвостовой части фюзеляжа, и в этом случае достигается еще большее сокращение протяженности кабелей, поскольку ввиду утяжеления хвоста самолета из-за размещения двигателей на конце фюзеляжа несущие поверхности несколько сдвинуты на фюзеляже назад.
В основу изобретения положена, с одной стороны, идея расположения устройства управления системы увеличения подъемной силы, т.е. вычислителя (компьютера) управления и контроля, или управляющего вычислителя, как можно ближе к нескольким управляемым и контролируемым компонентам системы увеличения подъемной силы, т.е. к системе механизации передней кромки крыла, или предкрылкам, и/или к компонентам системы механизации задней кромки крыла, или закрылкам. С другой стороны, окружающие и монтажные условия для соответствующего устройства управления в отношении надежности и доступности аналогичны окружающим и монтажным условиям в классической ячейке бортовых вычислителей или в отсеке электронного оборудования. Кроме того, предлагаемое в изобретении решение обеспечивает возможность достижения требуемой отказобезопасности системы увеличения подъемной силы без дополнительных затрат, в сравнении с расположением устройств управления, известным из уровня техники, когда бортовые компьютеры управления механизацией крыла размещаются в ячейках вблизи кабины самолета.
Соответственно, расположение устройства управления в самолете можно охарактеризовать как децентрализованное. По отношению к самой системе увеличения подъемной силы устройство управления по своему расположению может рассматриваться, в частности с функциональной точки зрения, как центральная структура, которая, особенно в случае систем привода с центральным приводом, тянущейся от него трансмиссией для передачи вращательного движения и местными устройствами перемещения при узлах навески (направляющих), дает преимущества в отношении полноты и быстроты контроля системы. Эти центральные системы привода отличаются высокой динамикой в случае отказов (например, при разрушении валов трансмиссии) и требуют быстрого обнаружения неисправностей и быстрых корректирующих ответных действий, а значит, быстрой передачи сигналов и высоких частот выборки (тактовых частот) при выполнении алгоритмов управления в управляющих вычислителях.
В еще одном варианте осуществления изобретения по меньшей мере одно устройство управления системы увеличения подъемной силы расположено на участке фюзеляжа самолета, который проходит, глядя в продольном направлении самолета, от передней точки, которая расположена спереди от крайней передней точки области примыкания крыла к фюзеляжу, или центроплана, на расстоянии от нее, равном длине корневой хорды крыла, до задней точки, которая расположена сзади от крайней задней точки области примыкания крыла к фюзеляжу на расстоянии от нее, равном длине корневой хорды крыла. При этом под "длиной корневой хорды крыла" понимается отрезок длины, в пределах которого тянется в продольном направлении фюзеляжа область примыкания крыла к фюзеляжу, т.е. область пересечения обшивки крыла и обшивки фюзеляжа.
В одном варианте осуществления изобретения система увеличения подъемной силы представляет собой систему механизации передней кромки крыла с перемещаемыми элементами механизации передней кромки крыла, причем устройство управления для обеспечения перемещения элементов механизации функционально связано с ними. При этом, в частности, устройство управления системы механизации передней кромки крыла может быть расположено, глядя в продольном направлении самолета, перед областью примыкания крыла к фюзеляжу.
В одном варианте осуществления изобретения, альтернативном или дополнительном, система увеличения подъемной силы содержит систему механизации задней кромки крыла с перемещаемыми элементами механизации задней кромки крыла, причем устройство управления системы механизации задней кромки крыла для обеспечения перемещения элементов механизации функционально связано с ними. При этом, в частности, устройство управления системы механизации задней кромки крыла может быть расположено, глядя в продольном направлении самолета, за областью примыкания крыла к фюзеляжу.
В одном варианте осуществления изобретения устройство управления для системы механизации передней кромки крыла, содержащее два управляющих вычислителя, установлено в области фюзеляжа чуть спереди центроплана, а устройство управления для системы механизации задней кромки крыла, содержащее два управляющих вычислителя, установлено, также в области фюзеляжа, чуть сзади центроплана. Благодаря такому расположению сокращаются отрезки пути между управляющими вычислителями и электрическими компонентами соответствующего приводного устройства, такими как приводные двигатели, фиксирующие тормоза, а также датчиками положения и обнаружения неисправностей. Интерфейсы для управления и контроля системы механизации передней кромки крыла и/или системы механизации задней кромки крыла выполнены аналоговыми, так что для электрических компонентов соответствующей системы привода аналого-цифровое и цифро-аналоговое преобразование сигналов не требуется. Соответственно этому электрические компоненты соответствующей системы привода не нуждаются в интегрированных электронных модулях, процессорах и подобных средствах.
Поскольку в соответствии с изобретением устройство ввода или рычаг управления для ввода заданных значений положений элементов системы механизации передней кромки крыла и/или системы механизации задней кромки крыла связано/связан посредством цифрового канала передачи данных с устройством управления для передачи команд заданного положения элементов механизации крыла с целью перемещения последних, сигналы различных положений устройства ввода или рычага управления, например "0", "1", "2", …, или "полностью" оцифровываются с помощью аналого-цифрового интерфейса и посылаются в виде цифровой информация по цифровым линиям в управляющие вычислители системы механизации передней кромки крыла и/или системы механизации задней кромки крыла. Это аналого-цифровое преобразование может осуществляться в устройстве ввода или в рычаге управления либо за их пределами, т.е. на пути передачи сигналов между устройствами ввода или рычагом управления и бортовой информационной шиной или, в частности, ее цифровым узлом сбора и распределения данных (коммутатор), посредством отдельного электронного узла. В частности, также предусматривается возможность обмена по той же цифровой сети с управляющими вычислителями системы механизации передней кромки крыла и/или системы механизации задней кромки крыла сигналами в чисто цифровой форме, получаемыми из других систем или отравляемыми в другие системы.
Таким образом, в соответствии с изобретением данные или сигналы, получаемые из кабины или ближайшего окружения кабины и поступающие туда, после их оцифровки передаются в соответствующее устройство управления системы увеличения подъемной силы в цифровой форме. Соответственно этому сравнительно большое расстояние между зоной кабины и крылом перекрывается цифровой информационной шиной, тогда как собственно управление соответствующим механическим перемещающим устройством системы увеличения подъемной силы и его контроль выполняются посредством аналоговых интерфейсов и аналоговых сигналов.
Преимущество изобретения заключается в том, что за счет переноса устройства управления, т.е. управляющих вычислителей системы увеличения подъемной силы, из отсека электронного оборудования в передней части самолета в область, находящуюся вблизи нескольких компонентов системы, приводимых в действие и контролируемых этим устройством управления, значительно сокращаются количество и вес кабелей, предназначенных для передачи аналоговых сигналов (напряжения, тока) между устройствами управления и соответствующими компонентами системы увеличения подъемной силы, т.е. системы механизации задней кромки (закрылков) и/или системы механизации передней кромки (предкрылков, щитков Крюгера и т.п.). Эта особенность изобретения выгодна, прежде всего, на самолетах, у которых двигатели расположены в конце фюзеляжа, поскольку у таких самолетов ввиду расположения двигателей сзади, глядя в продольном направлении фюзеляжа, несущие поверхности (консоли крыла) за счет соответствующего утяжеления хвоста самолета расположены в продольном направлении со сравнительно большим сдвигом назад.
В предлагаемом решении данные, которые обрабатываются функциями, заложенными в соответствующем устройстве управления системы увеличения подъемной силы, и для которых достаточна меньшая скорость обработки с меньшей частотой выборки, чем для сигналов, несущих команды соответствующему приводному устройству системы увеличения подъемной силы, передаются в устройство управления посредством цифрового канала передачи данных или цифровой шины. К таким данным, передаваемым посредством цифрового канала передачи, относятся вырабатываемые устройством ввода при воздействии на него команды заданного положения элементов механизации крыла с целью перемещения последних. Как возможный вариант, к этим данным также относятся данные, принимаемые от других самолетных систем или передаваемые таким системам. Те данные или значения сигналов, для обработки которых в устройстве управления требуется высокая скорость обработки с высокой частотой выборки, передаются посредством аналогового канала передачи в соответствующее приводное устройство системы увеличения подъемной силы.
Вообще, подключение устройства ввода, например рычага управления, к устройству управления посредством цифрового канала передачи данных требует аналого-цифрового преобразования сигналов, а также применения дополнительного интерфейса с цифровым каналом передачи данных. Однако даже с учетом этого достигаемые изобретением преимущества, связанные с сокращением протяженности кабелей в аналоговых сигнальных линиях между устройством ввода и устройством управления, вкупе с сокращением протяженности кабелей аналоговых сигнальных линий при функциональном соединении устройства управления с компонентами или датчиками для регистрации положения элементов механизации крыла обеспечивают повышение уровня совершенства системы в целом. Вместе с тем, наряду с сокращением протяженности кабелей аналоговых линий изобретение также уменьшает число аналоговых соединений в системе увеличения подъемной силы в соответствии с изобретением. Это позволяет оптимизировать затраты на интеграцию компонентов системы увеличения подъемной силы, а сокращение протяженности кабелей, в частности их веса, позволяет уменьшить сборочные и монтажные затраты в производстве.
Замена аналоговой передачи управляющим вычислителям сигнала от рычага управления закрылками (заданное положение закрылков) на цифровую передачу соответствующих данных принципиально уменьшает число кабелей для этого интерфейса. Поскольку при использовании цифровых сигналов (сигнал от рычага управления закрылками, сигналы, поступающие от других систем и посылаемые им) можно многократно совместно использовать уже имеющиеся цифровые сети, от прокладки специальных кабелей для этих компонентов можно частично или полностью отказаться. Это ведет к дальнейшей экономии в отношении каблирования самолета и веса кабелей.
В соответствии с изобретением по меньшей мере одно устройство управления расположено в зоне размещения полезной нагрузки, т.е. в грузовом отсеке фюзеляжа, в условиях кондиционирования воздуха, которые хотя и отличаются от условий кондиционирования отсека электронного оборудования, расположенного в передней части фюзеляжа, но таковы, что в этих условиях при соответствующем выполнении электрических и электронных компонентов по меньшей мере одного устройства управления эти компоненты способны удовлетворять требованиям по интенсивности отказов и отказобезопасности.
При этих достигаемых изобретением преимуществах предлагаемая система увеличения подъемной силы может эксплуатироваться с обычной системой привода, что позволяет, в частности, оснастить систему увеличения подъемной силы простыми надежными датчиками, а также простыми надежными электрическими клапанами переключения или сервоклапанами без сложных локальных процессорных узлов. Под простыми и надежными датчиками, а также простыми надежными электрическими клапанами переключения или сервоклапанами понимаются компоненты, способные отвечать предъявляемым к ним функциональным требованиям и требованиям по надежности также при их эксплуатации в местах с жесткими внешними условиями, характерными для крыла, а также его передней или задней кромок, т.е. в местах, подверженных сильным колебаниям температуры, влажности, давления, а также электромагнитным помехам.
В одном варианте осуществления изобретения для контроля как системы механизации передней кромки крыла, так системы механизации задней кромки крыла используются одни и те же датчики, а устройство управления для системы механизации передней кромки крыла и устройство управления для системы механизации задней кромки крыла имеют одинаковые интерфейсы для сопряжения с приводными двигателями приводного устройства. Кроме того, в этом варианте осуществления изобретения гнезда электрических разъемов для установки устройства управления системы механизации передней кромки крыла и гнезда электрических разъемов для установки устройства управления системы механизации задней кромки крыла выполнены таким образом, чтобы быть совместимыми как для установки устройства управления системы механизации передней кромки крыла, так и для установки устройства управления системы механизации задней кромки крыла. В этой связи под "гнездами электрических разъемов" понимается контактное устройство, в частности узел электрических штепсельных контактов.
Это позволяет использовать управляющие вычислители или управляющие компьютеры одного типа или вычислители одной модели для устройства управления как системы механизации передней кромки крыла, так и системы механизации задней кромки крыла. Если в одном варианте осуществления изобретения предусмотрено два компьютера на устройство управления системы механизации передней кромки крыла и два компьютера на устройство управления системы механизации задней кромки крыла, то все четыре управляющих вычислителя могут быть выполнены одинаковыми в отношении их аппаратной части и, как возможный вариант, в отношении их интерфейсов, и в частности, могут быть снабжены одним и тем же обозначением. Это мероприятие дает то преимущество, что в этом варианте осуществления изобретения для четырех одинаково выполненных гнезд электрических разъемов, т.е. двух управляющих вычислителей системы механизации передней кромки крыла и двух управляющих вычислителей системы механизации задней кромки крыла, имеющих одинаковую конструкцию, может использоваться одна модель управляющего вычислителя. Благодаря этому можно сократить расходы на приобретение и хранение вычислителей. Кроме того, это дает эксплуатанту самолета более высокую гибкость в отношении уровня готовности приборов, в частности управляющих вычислителей, при отказе одного управляющего вычислителя или даже при отказе обоих управляющих вычислителей системы механизации передней кромки крыла или обоих управляющих вычислителей системы механизации задней кромки крыла.
В еще одном варианте осуществления изобретения управляющие вычислители системы механизации передней кромки крыла выполнены взаимозаменяемыми с управляющими вычислителями системы механизации задней кромки крыла, так что при отказе обоих управляющих вычислителей системы механизации передней кромки крыла или системы механизации задней кромки крыла один из этих отказавших управляющих вычислителей можно заменить одним из двух еще исправных управляющих вычислителей соответственно другой системы механизации, т.е. системы механизации задней кромки крыла или системы механизации передней кромки крыла. Таким образом, готовность системы можно восстановить простой перестановкой соответствующих управляющих вычислителей. Это дает эксплуатанту самолета повышенную гибкость при эксплуатации авиационной техники в условиях сокращенной готовности оборудования.
Краткое описание чертежей
Ниже рассмотрены примеры осуществления изобретения, поясняемые прилагаемыми чертежами, на которых показано:
на фиг.1 - схематическое изображение самолета с функциональной схемой предлагаемой в изобретении системы увеличения подъемной силы в одном варианте ее выполнения, включающем в себя систему механизации передней кромки крыла и систему механизации задней кромки крыла, а также с другими самолетными системами, установленными на борту самолета,
на фиг.2 - функциональная схема еще одного варианта выполнения предлагаемой в изобретении системы увеличения подъемной силы, предназначенной для перемещения элементов механизации крыла и включающей в себя систему механизации передней кромки крыла и систему механизации задней кромки крыла, каждая из которых имеет соответствующее приводное устройство,
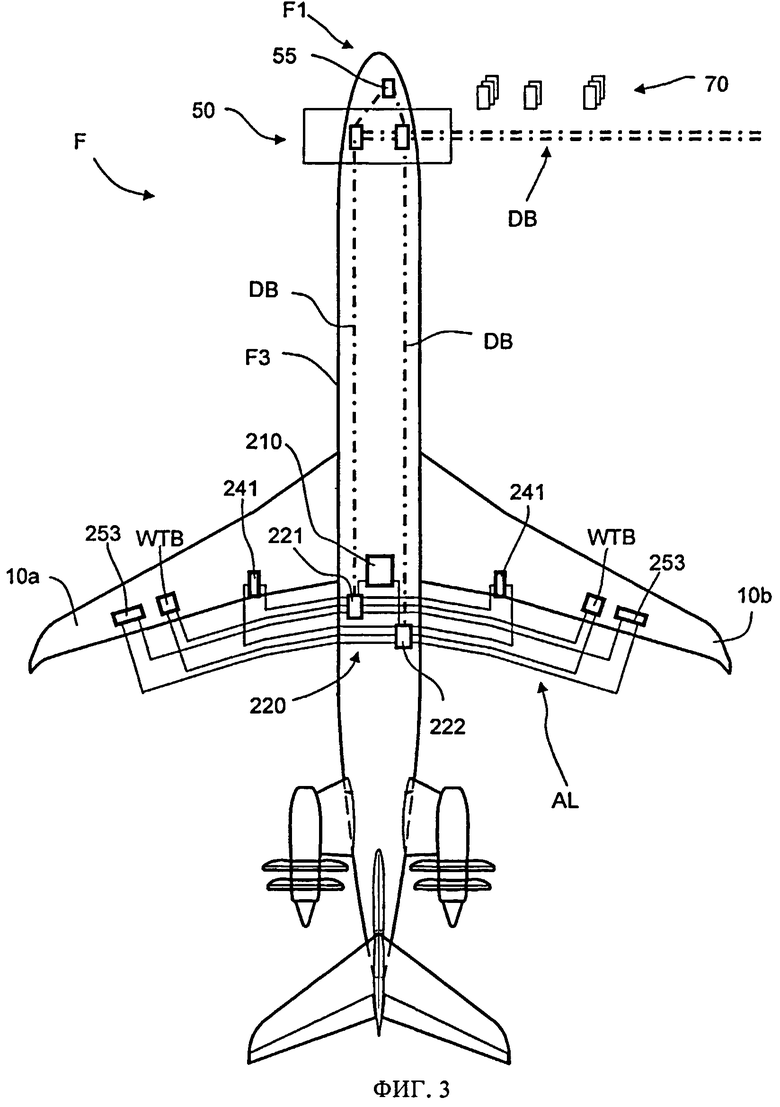
на фиг.3 - схематическое изображение линий передачи сигналов в одном варианте выполнения предлагаемого в изобретении самолета с системой механизации задней кромки крыла,
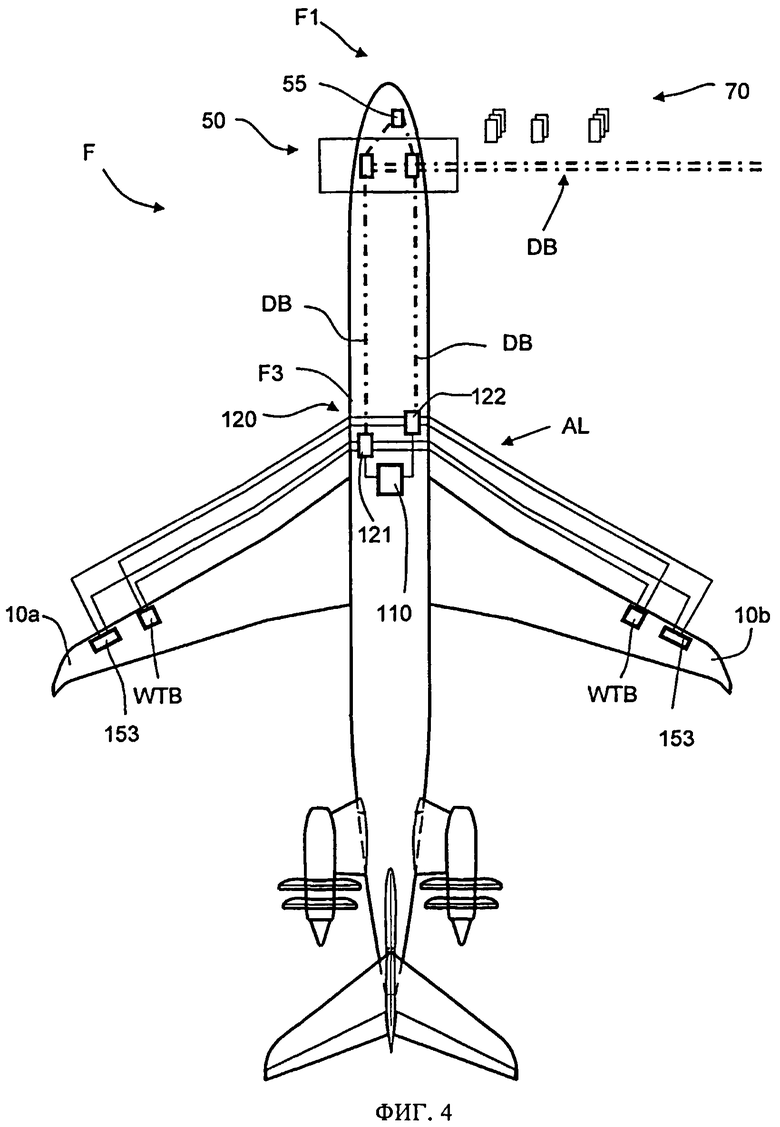
на фиг.4 - схематическое изображение линий передачи сигналов в одном варианте выполнения предлагаемого в изобретении самолета с системой механизации передней кромки крыла.
Осуществление изобретения
На самолет F, схематически изображенный на фиг.1, наложена функциональная схема предлагаемой в изобретении системы HAS увеличения подъемной силы в одном варианте ее выполнения, включающем в себя систему HAS1 механизации передней кромки крыла и систему HAS2 механизации задней кромки крыла. В соответствии с изобретением самолет F может иметь систему HAS1 механизации передней кромки крыла и/или систему HAS2 механизации задней кромки крыла. Система HAS1 механизации передней кромки крыла в общем случае предусмотрена для перемещения (выпуска и уборки) по меньшей мере одного элемента механизации передней кромки крыла, который может представлять собой выдвижной предкрылок или щиток или отклоняемый носок крыла. Система HAS2 механизации задней кромки крыла предусмотрена для перемещения (выпуска и уборки) по меньшей мере одного элемента механизации задней кромки крыла, который может представлять собой закрылок или поворотный щиток, установленный на крыле.
На приведенных на фиг.1-4 функциональных схемах вариантов выполнения предлагаемой в изобретении системы увеличения подъемной силы по меньшей мере один элемент механизации задней кромки крыла или закрылок и/или элемент механизации передней кромки крыла или выдвижной предкрылок предусмотрен на каждой консоли крыла.
На фиг.1 показан пример выполнения самолета F с системой автоматического управления полетом и крылом, имеющим две консоли 10а, 10b и по меньшей мере по одному элерону 11а, 11b на них. Самолет также имеет на каждой консоли 10а, 10b крыла по три элемента 13а, 13b механизации передней кромки крыла и по три элемента 14а, 14b механизации задней кромки крыла. Дополнительно каждая консоль 10а, 10b крыла может иметь несколько интерцепторов (спойлеров), на фиг.1 не показанных. На фиг.1 нанесена связанная с самолетом F система координатных осей, включающая в себя продольную ось X, поперечную ось Y и вертикальную ось Z самолета.
Кроме того, самолет F имеет хвостовое оперение 20 с вертикальным оперением 21 и горизонтальным оперением 22, на консолях которого имеется по меньшей мере по одному рулю высоты 23. Хвостовое оперение 20 может быть выполнено, например, Т-образным, как показано на фиг.1, или крестообразным.
Предлагаемый в изобретении самолет F может иметь и другую схему, нежели у самолета F, изображенного на фиг.1. Например, предлагаемым в изобретении самолетом также может быть высокоплан или самолет, выполненный по схеме "летающее крыло". Кроме того, такой самолет может быть самолетом, имеющим вместо горизонтального оперения передние рулевые поверхности (по схеме "утка"),
Предусматриваемое изобретением устройство для воздействия на устойчивость полета самолета F в требуемом направлении содержит расположенное в кабине самолета устройство ввода команд управления для ввода заданных значений параметров управления траекторией полета самолета (на чертежах не показано), которое, в частности, может иметь средства ручного ввода команд пилотом, например рычаг управления самолетом, и дополнительно педали, и функционально связанное с устройством ввода команд управления устройство 50 управления полетом с компьютером 51 управления полетом, в частности для управления траекторией полета самолета F.
Самолет F также имеет функционально связанное с устройством 50 управления полетом воспринимающее (сенсорное) устройство с устройством 52 получения воздушных данных для сбора информации о режиме полета с целью определения режима полета, а также воспринимающее устройство 53 на инерциальных датчиках для регистрации режима полета самолета F, в частности угловых скоростей самолета F, причем указанные устройства относятся к системе FF управления полетом самолета F. Функциональные модули или компьютеры системы FF управления полетом, в частности воспринимающие устройства, для обеспечения требуемой отказобезопасности могут быть реализованы с многократным резервированием. Устройство 52 получения воздушных данных включает в себя датчики воздушных данных для определения режима полета самолета F, в частности динамического давления, статического давления и температуры воздуха, обтекающего самолет F. С помощью воспринимающего устройства 53 на инерциальных датчиках измеряются, в частности, угловые скорости самолета F, в том числе угловые скорости рыскания и крена самолета, для определения положения самолета в полете. Устройство 50 управления полетом имеет приемное устройство для приема данных, регистрируемых воспринимающим устройством и передаваемых им в устройство 50 управления полетом.
С имеющимися у самолета поверхностями управления, например элеронами 11а, 11b, интерцепторами, связан по меньшей мере один сервопривод и/или приводное устройство, который(-ое) приводится в действие устройством 50 управления полетом посредством командных сигналов, представляющих собой команды заданного положения поверхностей управления, чтобы для управления самолетом F перемещать (отклонять) соответствующие поверхности управления. При этом одной из этих поверхностей управления может быть придан один сервопривод или же - для повышения отказобезопасности самолетной системы -несколько сервоприводов.
Устройство 50 управления полетом включает в себя функцию управления, на вход которой поступают команды управления от устройства ввода команд управления и значения измеряемых датчиками параметров, в частности угловых скоростей, измеряемых воспринимающим устройством. Функция управления выполнена таким образом, что зависимости от команд управления и регистрируемых и принимаемых угловых скоростей она вырабатывает для сервоприводов исполнительные команды и передает им эти команды, в результате чего путем приведения в действие сервоприводов осуществляется управление самолетом F согласно командам управления.
Устройство 50 управления полетом может быть связано с устройством 52 получения воздушных данных и воспринимающим устройством 53 на инерциальных датчиках, в частности, посредством цифровой информационной шины DB.
Помимо устройства 50 управления полетом и воспринимающего устройства, информационная шина или шинная система DB может связывать между собой и другие модули самолетных систем, которые на фиг.1 условно обозначены функциональным блоком 70. Другими модулями самолетных систем могут быть, например, система управления полетом или система технического обслуживания.
Самолет F также имеет систему HAS увеличения подъемной силы с предкрылками 13а, 13b и/или закрылками На, 14b, которые подвижно установлены на консолях крыла посредством механизмов 100, 200 их перемещения и при этом приводятся в движение соответствующим приводным устройством 110, 210. В изображенном на фиг.1 варианте осуществления изобретения приводные устройства 110, 210 приводятся в действие от устройства 320 управления. Для выпуска и уборки предкрылков 13а, 13b и/или закрылков 14а, 14b в кабине самолета F расположено устройство 55 ввода для ввода команд заданного положения элементов 13а, 13b, 14а, 14b механизации крыла с целью перемещения последних. Устройство 55 ввода в соответствии с изобретением функционально связано с устройством 320 управления посредством цифровой информационной шины DB.
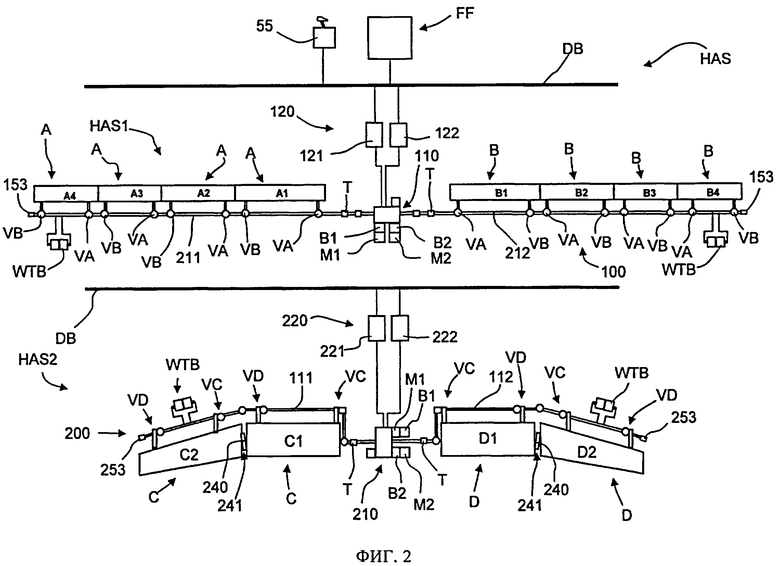
На фиг.2 изображен вариант выполнения системы увеличения подъемной силы, включающей в себя систему HAS1 механизации передней кромки крыла и систему HAS2 механизации задней кромки крыла и описываемой ниже:
Изображенная на фиг.2 система HAS1 механизации передней кромки крыла содержит:
- по четыре элемента А1, А2, A3, А4 и В1, В2, В3, В4 механизации передней кромки на каждую консоль крыла (на фиг.1 не показана), из которых элементы А1, А2, A3, А4 механизации передней кромки крыла установлены на первой консоли 10а крыла, а элементы В1, В2, В3, В4 механизации передней кромки крыла установлены на второй консоли 10b крыла с возможностью перемещения относительно соответствующей консоли крыла;
- механически связанный с элементами механизации передней кромки крыла механизм 100 их перемещения;
- связанное с механизмом 100 перемещения приводное устройство 110 для воздействия на механизм 100 перемещения на основании принимаемых команд на перемещение элементов механизации передней кромки крыла;
- устройство 120 управления механизацией передней кромки крыла, содержащее функцию управления, которая на основании входных сигналов, в частности команд заданного положения, вырабатывает исполнительные команды на перемещение элементов механизации передней кромки крыла и передает их в приводное устройство 110 механизации передней кромки крыла для воздействия на механизм 100 перемещения.
В общем случае в предлагаемой в изобретении системе HAS увеличения подъемной силы также может использоваться, на одну консоль крыла, меньше либо больше четырех элементов механизации передней кромки крыла.
На фиг.2 элементы А1, А2, A3, А4 механизации передней кромки левой, глядя в продольном направлении самолета, консоли 10а крыла, единообразно обозначены буквой А, а элементы В1, В2, В3, В4 механизации передней кромки правой консоли 10b крыла единообразно обозначены буквой В.
Для повышения отказобезопасности устройство 120 управления системы HAS1 механизации передней кромки крыла может быть выполнено с многократным резервированием. С этой целью может быть предусмотрено, как это показано на фиг.2, два одинаковых в определенном отношении или полностью одинаковых экземпляра 121, 122 устройства 120 управления, которые, образуя единое целое, связаны друг с другом посредством канала передачи данных для взаимного контроля и возможной перенастройки устройства 120 управления.
В общем случае устройство 120 управления системы HAS1 механизации передней кромки крыла расположено в соответствии с изобретением в зоне размещения полезной нагрузки в фюзеляже F3 самолета и на участке L3 фюзеляжа, который, глядя в продольном направлении X, проходит от места, которое, при взгляде вперед от передней стороны F4-1 центроплана F4, находится на расстоянии, составляющем одну треть отрезка L1 длины фюзеляжа, проходящего от передней стороны центроплана до носа F1 фюзеляжа по направлению к носу (передней оконечности) F1 самолета F, до места, которое, при взгляде назад от задней стороны F4-2 центроплана F4, находится на расстоянии, составляющем одну треть отрезка L2 длины фюзеляжа, проходящего от задней стороны центроплана до конца фюзеляжа F2 в хвосте самолета F по направлению к концу фюзеляжа F2 в хвосте самолета F. Таким образом, зона установки устройства 120 управления проходит на фиг.1 в продольном направлении Х в пределах отрезка длиной L3.
В особом варианте осуществления изобретения устройство 120 управления системы HAS1 механизации передней кромки крыла установлено в зоне размещения полезной нагрузки и на участке фюзеляжа F3 самолета, проходящем от передней стороны F4-1 центроплана F4 до места, которое, при взгляде вперед от передней стороны F4-1 центроплана F4, находится на расстоянии, составляющем одну треть отрезка L1 длины фюзеляжа, проходящего от передней стороны центроплана до носа F1 фюзеляжа по направлению к носу F1 самолета F. Это расстояние обозначено на фиг.1 как "(L1)/3".
В этой связи под передней или задней стороной F4-1, F4-2 центроплана F4 понимается, соответственно, передняя или задняя - глядя в продольном направлении самолета X - сторона крайней спереди или крайней сзади поперечной балки, проходящей поперек фюзеляжа F3, т.е. поперечной балки, проходящей вдоль направления Y. В этой связи под поперечной балкой понимается, в свою очередь, несущий (силовой) элемент конструкции центроплана.
Изображенная на фиг.2 система HAS2 механизации задней кромки крыла содержит:
- по два элемента механизации задней кромки крыла, или закрылка, на каждую консоль крыла (на фиг.1 не показана), а именно: внутренний закрылок С1 и внешний закрылок С2, установленные на первой консоли 10а крыла с возможностью перемещения относительно нее, а также внутренний закрылок D1 и внешний закрылок D2, установленные на второй консоль 10b крыла с возможностью перемещения относительно нее;
- механически связанный с элементами механизации задней кромки крыла механизм 200 их перемещения;
- связанное с механизмом 200 перемещения приводное устройство 210 системы механизации задней кромки крыла для воздействия на механизм 200 перемещения на основании принимаемых команд на перемещение элементов механизации задней кромки крыла;
- устройство 220 управления системы механизации задней кромки крыла, содержащее функцию управления, которая на основании входных сигналов, в частности команд заданного положения, вырабатывает исполнительные команды на перемещение элементов С1, С2, D1, D2 механизации задней кромки крыла и передает их в приводное устройство 210 системы механизации задней кромки крыла для воздействия на механизм 200 перемещения.
В общем случае в предлагаемой в изобретении системе увеличения подъемной силы также может использоваться, на одну консоль крыла, только один либо больше двух элементов механизации задней кромки крыла.
На фиг.2 элементы С1, С2 механизации задней кромки левой консоли 10а крыла единообразно обозначены буквой С, а элементы D1, D2 механизации задней кромки правой консоли 10b крыла единообразно обозначены буквой D.
Для повышения отказобезопасности устройство 220 управления системы HAS2 механизации задней кромки крыла может быть выполнено с многократным резервированием. С этой целью может быть предусмотрено, как это показано на фиг.2, два одинаковых в определенном отношении или полностью одинаковых экземпляра 221, 222 устройства 220 управления, которые, образуя единое целое, связаны друг с другом посредством канала передачи данных для взаимного контроля и возможной перенастройки устройства 220 управления.
В общем случае устройство 220 управления системы HAS2 механизации задней кромки крыла расположено в соответствии с изобретением в зоне размещения полезной нагрузки в фюзеляже F3 самолета и на участке L3 фюзеляжа, который, глядя в продольном направлении X, проходит от места, которое, при взгляде вперед от передней стороны F4-1 центроплана F4, находится на расстоянии, составляющем одну треть отрезка L1 длины фюзеляжа, проходящего от передней стороны центроплана до носа F1 фюзеляжа по направлению к носу (передней оконечности) F1 самолета F, до места, которое, при взгляде назад от задней стороны F4-2 центроплана F4, находится на расстоянии, составляющем одну треть отрезка L2 длины фюзеляжа, проходящего от задней стороны центроплана до конца фюзеляжа F2 в хвосте самолета F по направлению к концу фюзеляжа F2 в хвосте самолета F. Таким образом, зона установки устройства 220 управления проходит на фиг.1 в продольном направлении Х в пределах отрезка длиной L3.
В особом варианте осуществления изобретения устройство 220 управления системы HAS2 механизации задней кромки крыла установлено в зоне размещения полезной нагрузки и на участке фюзеляжа F3 самолета, проходящем от задней стороны F4-2 центроплана F4 до места, которое, при взгляде назад от задней стороны F4-2 центроплана F4, находится на расстоянии, составляющем одну треть отрезка L2 длины фюзеляжа, проходящего от задней стороны центроплана до конца F2 фюзеляжа в хвосте самолета F по направлению к концу фюзеляжа F2 в хвосте самолета. Это расстояние обозначено на фиг.1 как "(L2)/3".
Система HAS увеличения подъемной силы приводится в действие и контролируется с помощью интерфейса пилота, включающего в себя, в частности, устройство 55 ввода для ввода команд заданного положения элементов механизации крыла с целью перемещения последних, например рычаг управления. Согласно изобретению устройство ввода связано посредством цифрового канала передачи данных с устройством управления для передачи команд заданного положения элементов 14а, 14b механизации крыла с целью перемещения последних.
В представленном на фиг.2 варианте осуществления изобретения информационная шина самолетной системы имеет обозначение DB. Устройство 55 ввода содержит датчики положения, регистрирующие положение устройства 55 ввода. Кроме того, устройство 55 ввода имеет аналого-цифровой преобразователь, преобразующий вырабатываемые устройством 55 ввода сигналы в цифровые данные и передающий их в информационную шину DB через соответствующий интерфейс.
К информационной шине DB подключены устройства 120, 220 управления системы HAS1 механизации передней кромки крыла и системы HAS2 механизации задней кромки крыла, что позволяет пересылать значения положений устройства 55 ввода, определенные соответствующими датчиками положения и переданные посредством аналого-цифрового преобразователя в информационную шину DB, соответственно протоколу передачи данных информационной шины DB в устройство 120 управления системы HAS1 механизации передней кромки крыла и устройство 220 управления системы HAS2 механизации задней кромки крыла.
В качестве альтернативы изображенному на фиг.2 варианту осуществления изобретения, предусматривается возможность того, что система HAS увеличения подъемной силы содержит только систему HAS1 механизации передней кромки крыла и не содержит системы HAS2 механизации задней кромки крыла, или содержит только систему HAS2 механизации задней кромки крыла и не содержит системы HAS1 механизации передней кромки крыла, как это показано на фиг.3 и 4, соответственно. В этих случаях устройство 55 ввода функционально связано с устройством 120 управления системы HAS1 механизации передней кромки крыла или с устройством 220 управления системы HAS2 механизации задней кромки крыла, как это показано на фиг.3 и 4, соответственно.
Кроме того, в качестве альтернативы изображенному на фиг.2 варианту осуществления изобретения предусматривается возможность интегрирования устройства 120 управления системы HAS1 механизации передней кромки крыла и устройства 220 управления системы HAS2 механизации задней кромки крыла в одном устройстве управления вместе с модулем управления или системой 320 управляющих компьютеров, как это показано на фиг.1. Для повышения отказобезопасности такое устройство управления также может быть выполнено с многократным резервированием и возможным взаимным контролем его компонентов.
На фиг.3 и 4 показаны, в дополнение к фиг.2, на которой представлены механические компоненты или составные части предлагаемой в изобретении системы увеличения подъемной силы в одном варианте ее выполнения, схематические изображения предлагаемого в изобретении самолета в вариантах его оснащения системой HAS2 механизации задней кромки крыла и системой HAS1 механизации передней кромки крыла, соответственно. На этих изображениях показаны функциональные модули соответствующей системы увеличения подъемной силы, функциональные модули самолетной системы и соответствующие линий передачи сигналов, причем для наглядности отдельные функциональные модули и линии передачи сигналов представлены вынесенными за контур самолета. На фиг.3 и 4 компоненты, модули или составные части соответствующей системы увеличения подъемной силы снабжены используемыми на фиг.1 и 2 ссылочными обозначениями, если речь идет о компонентах, модулях или составных частях, функционально идентичных или схожих.
Вариант выполнения системы HAS1 механизации передней кромки крыла и системы HAS2 механизации задней кромки крыла, представленный в качестве примера на фиг.2, ниже описывается вместе с другими составными частями этих систем, причем для составных частей или компонентов, имеющих в целом одинаковые функции, используются те же ссылочные обозначения.
Приводные устройства 110, 210 могут включать в себя по два приводных двигателя M1, M2 для воздействия на механизмы 100, 200 перемещения элементов механизации крыла, а также приданные им тормозные устройства В1, В2 для стопорения соответствующей системы HAS, HAS1, HAS2 увеличения подъемной силы. Кроме того, приводные устройства 110, 210 могут иметь дифференциал. Дифференциал связан с выходными звеньями гидравлического двигателя Ml и электрического двигателя M2 таким образом, чтобы суммировать мощность, развиваемую гидравлическим двигателем M1 и электрическим двигателем М2, и передавать ее на приводные валы 111, 112, 211, 212. Тормозные устройства В1, В2 могут приводиться в действие командным сигналом соответствующего устройства 110, 210 управления.
К приводным устройствам 110, 210 присоединено по одному механизму 100, 200 перемещения соответствующих элементов А, В и С, D механизации крыла и в рассматриваемом варианте в общей сложности два приводных вала 111, 112, 211,212 для приведения в движение по меньшей мере одного элемента системы механизации передней кромки крыла (предкрылка) или системы механизации задней кромки крыла (закрылка) на каждой консоли крыла. Оба приводных вала 111, 112, 211, 212 соединены с соответствующим приводным устройством 110 и 210 и синхронизированы друг с другом посредством этого устройства. На основании соответствующих команд управления приводное устройство 110 и 210 приводит приводные валы 111, 112, 211, 212 во вращение для перемещения связанных с ними устройств перемещения соответствующих элементов механизации крыла. В участок приводного вала 111, 112, 211, 212, расположенный рядом с соответствующим приводным устройством 110 и 210, может быть встроен ограничитель Т крутящего момента.
В изображенной на фиг.2 системе увеличения подъемной силы при каждом элементе А, А1, А2, A3, А4 и В, В1, В2, В3, В4 системы HAS1 механизации передней кромки крыла расположено два механизма VA, VB перемещения. Кроме того, при каждом элементе C1, C2 и D1, D2 системы HAS2 механизации задней кромки крыла расположено два механизма VC, VD перемещения, а именно, при внутренних узлах навески элементов C1, C2 и D1, D2 механизации крыла расположены устройства VC перемещения, а при внешних узлах навески элементов C1, C2 и D1, D2 механизации крыла - устройства VD перемещения.
Ниже приводится описание устройств перемещения при примере одного варианта их выполнения, причем однотипные составные части каждого устройства перемещения являются функционально эквивалентными.
Каждое из устройств VA, VB и VC, VD перемещения имеет передаточный механизм и механизм навески. Передаточный механизм механически соединен с соответствующими приводными валами 111, 112, 211, 212 и преобразует вращательное движение соответствующих приводных валов 111, 112, 211, 212 в движение уборки или выпуска того участка элемента механизации крыла, который соединен с соответствующим устройством перемещения. В одном из вариантов осуществления изобретения механизм 100 и/или 200 перемещения может иметь по меньшей мере один датчик положения, определяющий положение механизмов 100 и/или 200 перемещения, а значит, и текущее положение соответствующего элемента механизации крыла, и посылающий значение (сигнал) этого положения по линии, не показанной на чертеже, в устройство 5 управления и контроля для контроля состояния соответствующей системы увеличения подъемной силы.
Например, у концов трансмиссионных линий из приводных валов 111, 112, 211, 212 может быть расположен датчик 153, 253 несимметричности выпуска/уборки механизации, также функционально связанный с устройством 120, 220 управления посредством сигнальной линии и посылающий по этой линии в устройство 110, 210 управления свое текущее показание, по которому можно судить о том, находится ли угловое положение концов трансмиссионных линий из приводных валов 111, 112, 211, 212 в пределах заданного диапазона или же приводные валы 111, 112, 211, 212 меняют угловое положение несимметрично.
Если на консоли крыла предусмотрено по меньшей мере два элемента системы HAS1 механизации передней кромки крыла или системы HAS2 механизации задней кромки крыла, между этими соседними элементами механизации крыла могут быть предусмотрены соединительные тяги 240 (показаны на фиг.2 и 3 только в системе механизации задней кромки крыла), у которых расположен соответствующий датчик 241. Датчик 241 соединительной тяги 240 функционально связан с соответствующим устройством 120, 220 управления и может быть выполнен, в частности, с возможностью измерения крайнего положения, причем при превышении заданного предельного значения соответствующее устройство 120, 220 управления присваивает состояние неисправности механизму 100, 200 перемещения элементов механизации крыла на той консоли крыла, на которой было установлено превышение предельного значения.
Кроме того, на участке приводных валов 111, 112, 211, 212, расположенном во внешней части соответствующей консоли крыла, расположено по одному расположенному в концевой части крыла тормозу WTB, который при его приведении в действие может блокировать соответствующую трансмиссионную линию 111, 112, 211, 212. Каждый из тормозов WTB функционально связан не показанной на чертеже линией с устройством 120, 220 управления и по этой линии может включаться и приводиться в действие устройством 120, 220 управления. Во время работы нормальным исходным состоянием расположенных в концевых частях крыла тормозов WTB является невключенное состояние, а котором они не препятствуют вращению приводных валов 111, 112, 211, 212. При поступлении соответствующего управляющего сигнала от устройства 120, 220 управления расположенные в концевых частях крыла тормоза WTB могут быть приведены в действие, чтобы застопорить соответствующие им приводные валы 111, 112, 211, 212.
Оба тормозных устройства В1, В2 соответствующего приводного устройства 110, 210 функционально связаны с соответствующим устройством 120, 220 управления, которое при заданных условиях может приводить в действие тормозные устройства В1, В2 и тем самым стопорить трансмиссионные линии из приводных валов 111, 112, 211, 212. В одном варианте осуществления изобретения предусматривается, что в случае отключения одного из двух приводных двигателей, а именно гидравлического двигателя M1 или электрического привода М2, устройство 120, 220 управления благодаря наличию дифференциала, выполненного таким образом, чтобы суммировать мощность, развиваемую гидравлическим двигателем M1 и электрическим двигателем М2, выдает сигнал мощности, уменьшенный на величину мощности отключенного приводного двигателя.
Механические неисправности в случае механизмов приведения в действие элементов механизации крыла или механизмов 100, 200 перемещения элементов механизации крыла, например заклинивание составной части механизма приведения в действие элементов механизации крыла или трансмиссионных линий из приводных валов 111, 112, 211, 212 или разрушение приводного вала трансмиссионной линии 111, 112, 211, 212, может привести к нежелательному поведению устройства, например, к несимметричному выпуску или уборке элементов механизации крыла, что устройство 120, 220 управления устанавливает с помощью сигналов, передаваемых датчиками 153, 253 несимметричности выпуска/уборки механизации. В этом случае устройство 120, 220 управления посылает расположенному в концевой части крыла тормозу WTB сигнал отключения, чтобы привести в действие тормоза WTB и застопорить приводные валы 111, 112, 211, 212.
При недопустимом отклонении определяемых устройством 120, 220 управления заданных положений от регистрируемых датчиками положения фактических положений устройство 120, 220 управления посылает сигнал включения расположенному в концевой части крыла тормозу WTB, а также тормозным устройствам B1, B2 для стопорения обеих трансмиссионных линий 111, 112, 211, 212.
Датчики, предусмотренные для соответствующей системы HAS1 механизации передней кромки крыла или системы HAS2 механизации задней кромки крыла, т.е. соответствующий датчик положения, соответствующий датчик 153, 253 несимметричности выпуска/уборки механизации, а при необходимости и соответствующий датчик 241 соединительной тяги, для подачи своих сигналов в соответствующее устройство 120, 220 управления по аналоговым линиям AL, т.е. электрическим линиям, передающим аналоговые сигналы, функционально связаны с соответствующим устройством 120, 220 управления. Точно так же управляемые посредством соответствующего устройства 120, 220 управления компоненты, в частности расположенные в концевой части крыла тормоза WTB, двигатель M1 или двигатель М2, для передачи им команд функционально связаны с соответствующим устройством 120, 220 управления аналоговыми линиями AL (фиг.3 и 4).
Описанная передача данных по информационной шине DB может осуществляться, в частности, с помощью станции сбора и распределения цифровых данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ИСТРЕБИТЕЛЬ (МФИ) | 2000 |
|
RU2166462C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2002 |
|
RU2213024C1 |
| СПОСОБ КОМПЛЕКСНОГО ПОВЫШЕНИЯ АЭРОДИНАМИЧЕСКИХ И ТРАНСПОРТНЫХ ХАРАКТЕРИСТИК, ЭКРАНОПЛАН ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ПОЛЕТА | 2010 |
|
RU2539443C2 |
| Крыло самолёта, кессон крыла самолета, центроплан, лонжерон (варианты) | 2019 |
|
RU2709976C1 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| БЕСПИЛОТНЫЙ МАЛОЗАМЕТНЫЙ САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И СПОСОБ ЕГО ПРИМЕНЕНИЯ ПРИ ВОЗДУШНОМ БАЗИРОВАНИИ | 2018 |
|
RU2686561C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| ДАЛЬНИЙ ПОИСКОВО-СПАСАТЕЛЬНЫЙ ПОПЛАВКОВЫЙ ГИДРОСАМОЛЕТ-АМФИБИЯ ТРИМАРАННОЙ СХЕМЫ КОМПОНОВКИ "ФРЕГАТ" | 2006 |
|
RU2324627C2 |
| САМОЛЕТ БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2007 |
|
RU2335430C1 |
Изобретение относится к области авиации, в частности к системам увеличения подъемной силы крыла самолета. Система состоит из компьютера управления полетом, элементов механизации крыла, связанных с ними приводных устройств, устройств управления, расположенного в кабине самолета устройства ввода команд заданного положения элементов механизации крыла, а также датчиков для регистрации положения элементов механизации крыла, связанных посредством аналоговых сигнальных линий с устройством управления. Устройство ввода связано посредством цифрового канала передачи данных с устройством управления для передачи команд заданного положения элементов механизации крыла. Устройство управления установлено в зоне размещения полезной нагрузки в фюзеляже самолета и на участке (L3) фюзеляжа, который, глядя в продольном направлении (X) фюзеляжа (F3) самолета, проходит от места, которое, при взгляде вперед от передней стороны (F4-1) центроплана (F4), находится на расстоянии ((L1)/3), составляющем одну треть отрезка (L1) длины фюзеляжа, проходящего от передней стороны центроплана до носа (F1) фюзеляжа, до места, которое, при взгляде назад от задней стороны (F4-2) центроплана (F4), находится на расстоянии ((L2)/3), составляющем одну треть отрезка (L2) длины фюзеляжа, проходящего от задней стороны центроплана до конца (F2) фюзеляжа в хвосте самолета (F). Повышается точность управления и безопасность полетов. 6 з.п. ф-лы, 4 ил.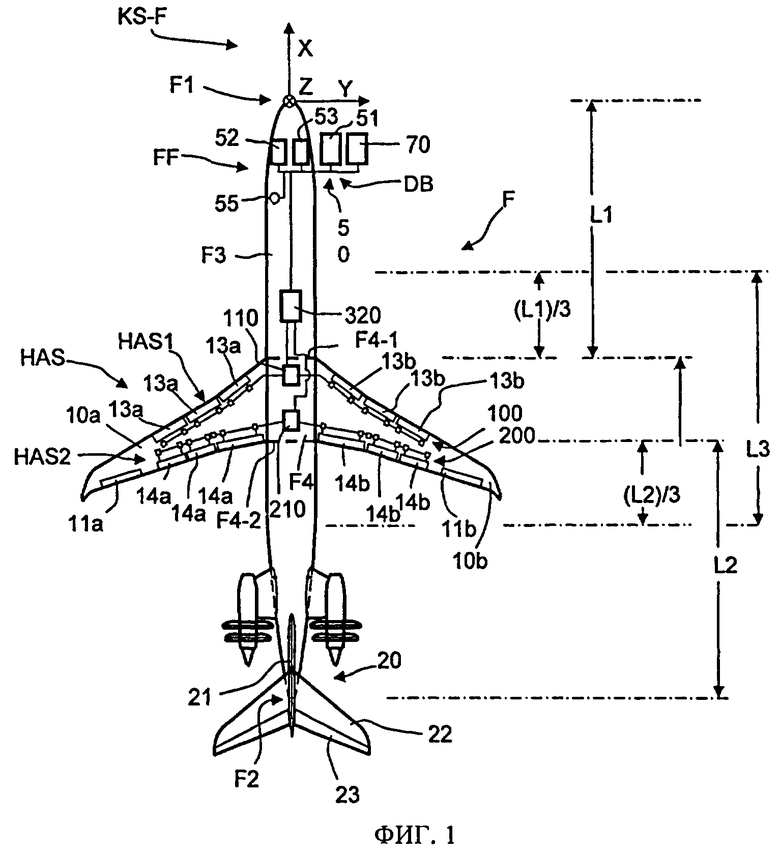
1. Самолет (F) с системой увеличения подъемной силы, имеющий:
- компьютер (51) управления полетом,
- по меньшей мере по одному элементу (13a, 13b; 14a, 14b; A, B; C, D) увеличивающей подъемную силу механизации крыла, установленному на каждой консоли крыла самолета (F) с возможностью перемещения относительно нее,
- приводное устройство (110, 210), связанное с элементом (13a, 13b; 14a, 14b; A, B; C, D) механизации крыла и выполненное таким образом, чтобы на основании команд управления перемещать элемент (13a, 13b; 14a, 14b; A, B; C, D) механизации крыла между убранным положением и выпущенным положением,
- устройство (120, 220) управления, связанное с приводным устройством посредством аналогового канала передачи данных и содержащее функцию управления для выработки команд управления, задающих положение элементов (13a, 13b; 14a, 14b; A, B; C, D) механизации крыла, а также для выработки команд контроля и блокировки для стопорения элементов (13a, 13b; 14a, 14b; A, B; C, D) механизации крыла в случае неисправности системы, причем устройство (120, 220) управления связано посредством цифрового канала передачи данных с компьютером (51) управления полетом для приема относящихся к режиму полета данных,
- расположенное в кабине самолета устройство (55) ввода для ввода команд заданного положения элементов (13a, 13b; 14a, 14b; A, B; C, D) механизации крыла с целью перемещения последних,
- датчики для регистрации положения элементов (13a, 13b; 14a, 14b; A, B; C, D) механизации крыла, связанные посредством аналоговых сигнальных линий с устройством (120, 220) управления,
отличающийся тем, что:
- устройство ввода связано посредством цифрового канала (DB) передачи данных с устройством (120, 220) управления для передачи команд заданного положения элементов (13a, 13b; 14a, 14b; A, B; C, D) механизации крыла с целью перемещения последних, и
- устройство (120, 220) управления системы (HAS) увеличения подъемной силы установлено в зоне размещения полезной нагрузки в фюзеляже (F3) самолета и на участке (L3) фюзеляжа, который, глядя в продольном направлении (X) фюзеляжа (F3) самолета, проходит от места, которое при взгляде вперед от передней стороны (F4-1) центроплана (F4) находится на расстоянии ((L1)/3), составляющем одну треть отрезка (L1) длины фюзеляжа, проходящего от передней стороны центроплана до носа (F1) фюзеляжа, до места, которое при взгляде назад от задней стороны (F4-2) центроплана (F4) находится на расстоянии ((L2)/3), составляющем одну треть отрезка (L2) длины фюзеляжа, проходящего от задней стороны центроплана до конца (F2) фюзеляжа в хвосте самолета (F).
2. Самолет по п.1, отличающийся тем, что система увеличения подъемной силы представляет собой систему (HAS1) механизации передней кромки крыла, включающую в себя перемещаемые элементы механизации передней кромки крыла и устройство (120) управления, причем устройство (120) управления системы (HAS1) механизации передней кромки крыла для обеспечения перемещения элементов механизации функционально связано с ними.
3. Самолет по п.2, отличающийся тем, что устройство (120) управления системы (HAS1) механизации передней кромки крыла установлено в зоне размещения полезной нагрузки в фюзеляже самолета и при этом на участке, проходящем от передней стороны (F4-1) центроплана (F4) до места, которое при взгляде вперед от передней стороны (F4-1) центроплана (F4) находится на расстоянии ((L1)/3), составляющем одну треть отрезка (L1) длины фюзеляжа, проходящего от передней стороны центроплана до носа (F1) фюзеляжа самолета (F).
4. Самолет по п.1, отличающийся тем, что система увеличения подъемной силы представляет собой систему (HAS2) механизации задней кромки крыла, включающую в себя перемещаемые элементы механизации задней кромки крыла и устройство (220) управления, причем устройство (210) управления системы (HAS2) механизации задней кромки крыла для обеспечения перемещения элементов механизации функционально связано с ними.
5. Самолет по п.4, отличающийся тем, что устройство (220) управления системы (HAS2) механизации задней кромки крыла установлено в зоне размещения полезной нагрузки в фюзеляже (F3) самолета и при этом на участке, проходящем от задней стороны (F4-2) центроплана (F4) до места, которое при взгляде назад от задней стороны (F4-2) центроплана (F4) находится на расстоянии ((L2)/3), составляющем одну треть отрезка (L2) длины фюзеляжа, проходящего от задней стороны центроплана до конца (F2) фюзеляжа в хвосте самолета (F).
6. Самолет по п.1, отличающийся тем, что по меньшей мере одно устройство (120, 220) управления образовано компьютерами и аппаратными интерфейсами, выполненными на аппаратном уровне одинаковыми для обеспечения взаимозаменяемости компьютеров с аппаратными интерфейсами между устройствами (120, 220) управления и/или в пределах устройств (120, 220) управления.
7. Самолет по п.1, отличающийся тем, что он выполнен по схеме с расположением двигателей на хвостовой части фюзеляжа.
| СИСТЕМА ЩИТКОВ НА КРЫЛЕ САМОЛЕТА С ЖЕСТКИМ КРЫЛОМ | 2004 |
|
RU2346851C2 |
| US 20060043242 A1, 02.03.2006 | |||
| WO 2008091424 A2, 31.07.2008 | |||
| WO 2006120321 A2, 16.11.2006. | |||

