Изобретение относится к горным машинам, используемым при разработке месторождений полезных ископаемых открытым способом, а именно к карьерным экскаваторам типа «прямая лопата» с канатным приводом подъема ковша.
Рабочее оборудование канатного карьерного экскаватора типа «прямая лопата» включает стрелу, рукоять с закрепленным на ней ковшом, механизм напора и канатный механизм подъема ковша. В канатных экскаваторах траектория движения режущей кромки ковша формируется в результате осуществления двух операций: операции приведения рукояти с ковшом в возвратно-вращательное движение в вертикальной плоскости в системе координат, связанной со стрелой, ось качания рукояти в этой системе координат неподвижна и операции регулирования кривизны траектории. Причем вторая операция осуществляется либо путем изменения расстояния между ковшом и осью качания рукояти, которая в этом случае неподвижно закреплена в стреле, либо путем перемещения этой оси относительно стрелы.
Известен канатный карьерный экскаватор типа «прямая лопата» (Р&Н 2800 ХР(В), рекламный проспект Harnishfeger Corporation, Milwaukee, WI 53201), в котором рукоять соединена со стрелой посредством седлового подшипника. В результате кинематического соединения между собой стрелы, рукояти и седлового подшипника образуются вращательная и поступательная кинематические пары, допускающие поворот и поступательное перемещение рукояти относительно стрелы. Совокупность указанных трех звеньев с учетом приводных кинематических пар представляет собой вращательно-поступательный механизм напора канатного экскаватора. Привод вращательно-поступательного механизма напора, под действием которого происходит поступательное перемещение рукояти относительно седлового подшипника, расположен на стреле и выполнен в виде шестеренно-реечного приводного механизма. В процессе работы экскаватор совершает периодически передвижки к забою на расстояние, равное величине перемещения рукояти относительно седлового подшипника. После очередной передвижки копание начинают при полностью втянутой рукояти, затем ее постепенно выдвигают с помощью привода механизма напора, увеличивая до максимального значения радиус траектории копания.
Отметим три отличительных признака рабочего оборудования экскаватора-аналога: 1) механизм напора содержит поступательную кинематическую пару; 2) приводной механизм напора расположен на стреле; 3) радиус круговой траектории режущей кромки ковша может изменяться, а центр вращения ковша неподвижен.
Второй отличительный признак следует отнести к достоинствам экскаватора-аналога, так как размещение привода механизма напора на стреле, соединенной с поворотной платформой шарнирно, позволяет исключить динамическое нагружение металлоконструкций поворотной платформы и установленных на ней механизмов от воздействия сил напора.
Третий отличительный признак оценивается тоже положительно, так как реализация напора посредством изменения радиуса кривизны траектории перемещения режущей кромки ковша, осуществляется одинаково для любой точки траектории копания - это упрощает управление экскаватором, не утомляет машиниста и, следовательно, положительно влияет на производительность экскаватора.
А вот первый отличительный признак следует отнести к недостаткам рабочего оборудования экскаватора-аналога, учитывая то, что механизм напора содержит быстро изнашиваемые открытые кинематические пары, а привод этого механизма включает в себя многоступенчатые и трудоемкие в изготовлении зубчатые, ременные и другие механические передачи, которые встроены в металлоконструкции рабочего оборудования. Совокупность указанных факторов приводит к снижению важнейших показателей качества экскаватора, а именно технологичности, долговечности, ремонтопригодности.
Известен канатный карьерный экскаватор BUSYRUS-795B (Рекламный проспект BUSYRUS Electric Mining Shovels-795, World Headquarters, 1100 Milwaukee Avenue, South Milwaukee, Wisconsin, 53172-0500, USA), выбранный в качестве прототипа. Экскаватор оборудован двумя стрелами - вспомогательной подвижной и основной неподвижной. На неподвижной стреле, установленной на поворотной платформе, находятся головные блоки механизма подъема ковша. Подвижная стрела шарнирно соединена с поворотной платформой экскаватора с возможностью относительного поворота под действием приводного гидроцилиндра, шток которого соединен с этой стрелой, а цилиндр соединен с двуногой стойкой, которая установлена на поворотной платформе и передает на нее усилие напора, развиваемое приводным гидроцилиндром. Рукоять шарнирно соединена с подвижной стрелой с возможностью относительного поворота под действием подъемного каната механизма подъема ковша. В совокупности поворотная платформа с двуногой стойкой, подвижная стрела, приводной гидроцилиндр и рукоять образуют шарнирно-сочлененный многозвенник, представляющий собой механизм напора рабочего оборудования этого экскаватора. Причем при поворотах подвижной стрелы из одного крайнего положения в другое ось поворота рукояти с закрепленным на ней ковшом перемещается по дуге относительно основной неподвижной стрелы, а расстояние между ковшом и осью поворота рукояти остается постоянным. В результате для того, чтобы в разных точках траектории копания осуществить внедрение зубьев ковша в грунт на одинаковую глубину, приходится центр поворота рукояти перемещать на неравные расстояния, что усложняет работу машиниста, следовательно отрицательно влияет на производительность экскаватора.
Выделим три отличительных признака рабочего оборудования экскаватора-прототипа: 1) в механизме напора отсутствует поступательная кинематическая пара; 2) усилие напора через лебедку напора воздействует на поворотную платформу; 3) радиус вращения режущей кромки ковша постоянный, а центр вращения перемещается по дуге, в системе координат, связанной с неподвижной стрелой. Применение в механизме напора экскаватора-прототипа конструктивной схемы шарнирно-сочлененного многозвенника позволяет избавиться от таких недостатков экскаватора-аналога, как быстрое изнашивание открытых кинематических пар, и наличие многоступенчатых и трудоемких в изготовлении зубчатых, ременных и других механических передач. Однако недостатки прототипа, обусловленные его вторым и третьим отличительными признаками, являются достаточно веским основанием для поиска нового способа перемещения ковша канатного карьерного экскаватора.
Техническая задача предлагаемого изобретения состоит в том, чтобы, сохранив в рабочем оборудовании канатного карьерного экскаватора преимущества способа формирования траектории движения ковша, при котором изменяется расстояние между ковшом и осью качания рукояти, существенно упростить конструкцию механизма напора, исключив из него кинематическую пару с поступательным движением соединенных звеньев.
Техническая задача решается формированием траектории движения ковша канатного карьерного экскаватора с помощью операции приведения рукояти с ковшом в возвратно-вращательное движение в вертикальной плоскости в системе координат, связанной со стрелой, при этом ось качания рукояти в этой системе координат неподвижна, а также с помощью операции регулирования кривизны траектории путем изменения расстояния между ковшом и осью качания рукояти, для чего неподвижную в системе координат, связанной со стрелой, ось качания рукояти перемещают в системе координат, связанной с рукоятью, по дуге окружности, центр которой находится на конце рукояти.
Рабочее оборудование, позволяющее реализовать вышеизложенный способ, включает стрелу, рукоять с жестко установленным на ней ковшом, канатный механизм подъема ковша и механизм напора. Механизм напора содержит коромысло, образующее со стрелой и рукоятью вращательные пары, и гидроцилиндр, шток и корпус которого шарнирно соединены с коромыслом и рукоятью соответственно. Шарнирное соединение коромысла и рукояти позволяет изменять пропорционально перемещению штока гидроцилиндра расстояние между режущей кромкой ковша и осью шарнирного соединения коромысла со стрелой.
В предлагаемом способе, как и в известном реализованном в конструкции аналога способе, центр вращения рукояти неподвижен в системе координат, связанной с основной стрелой экскаватора, в то время как в способе, реализованном в конструкции прототипа, указанный центр вращения подвижен относительно основной стрелы. Сходство первых двух (предлагаемого и реализованного в конструкции аналога) способов заключается в том, что, когда рукоять перемещается относительно стрелы в системе координат, связанной со стрелой, изменяется расстояние от центра вращения рукояти до зубьев ковша, что в системе координат, связанной с рукоятью, выглядит как перемещение не рукояти, а центра ее вращения, который в этой стреле зафиксирован. Различие же этих двух способов заключается в том, что в известном способе указанное перемещение центра вращения рукояти является прямолинейно-поступательным, а в предлагаемом способе имеет форму дуги, хорда которой равна длине этого перемещения. Поэтому реализация предлагаемого способа дает возможность заменить в механизме напора поступательные кинематические пары вращательными и создать рабочее оборудование для канатного карьерного экскаватора, которое обладает всеми вышеуказанными достоинствами аналога и прототипа и не имеет ни одного их недостатка.
Для реализации способа оптимальным является рычажный механизм напора (коромысло, рукоять и гидроцилиндр). Такой механизм напора является универсальным, устанавливается на стреле и рукояти, причем если рукоять двухбалочная, то симметрично соответственно на каждой балке применяется для передачи больших усилий, достаточно простой в изготовлении, прочный и более износостойкий, чем зубчато-реечные механизмы в рабочем оборудовании известных карьерных экскаваторов.
Этот механизм обладает минимальным люфтом, легкой подвижностью и высокой надежностью при перегрузке, позволяет плавно регулировать расстояния между режущей кромкой ковша и осью качания рукояти за счет поворота коромысла относительно рукояти пропорционально перемещению штока гидроцилиндра, и рационально использовать гидравлический привод, позволяющий создавать большие усилия при плавном регулировании перемещения штока гидроцилиндра.
Шарнирное соединение коромысла и рукояти позволяет изменять расстояние между режущей кромкой ковша и осью, на которой установлено коромысло пропорционально перемещению штока гидроцилиндра.
Предлагаемый способ изменения траектории движения ковша позволяет, сохраняя преимущества канатного карьерного экскаватора, упростить рабочее оборудование, а именно конструкцию стрелы, рукояти и механизма напора.
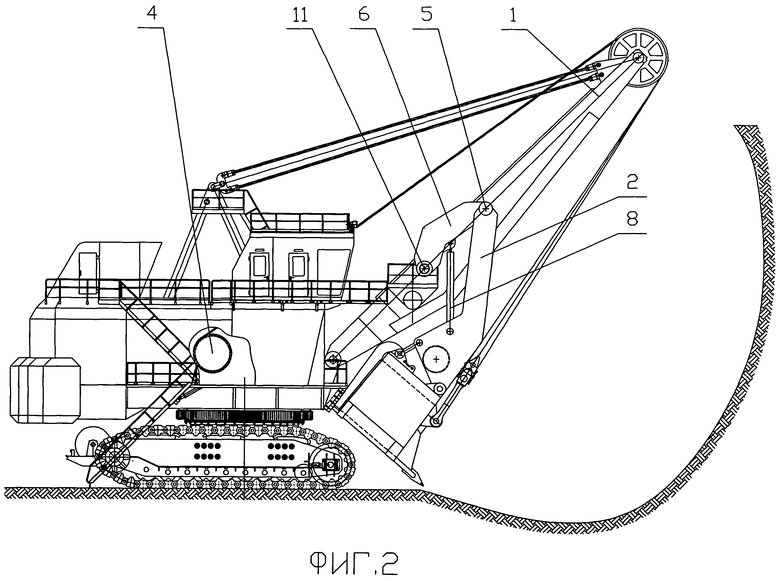
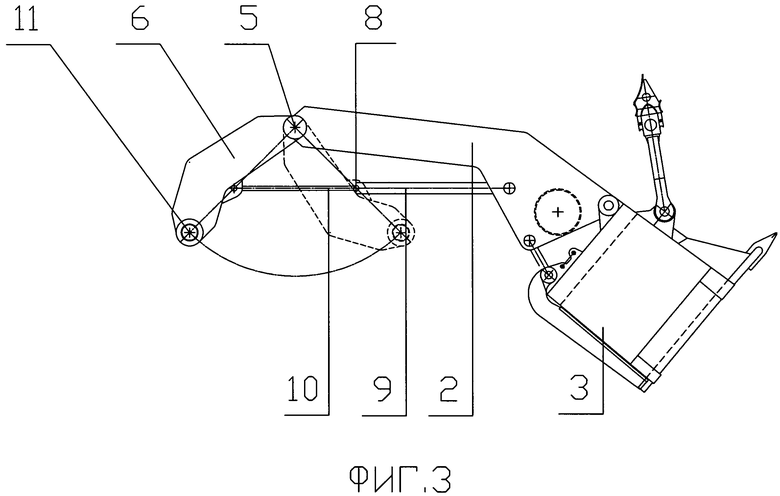
На фигурах 1 и 2 представлен карьерный канатный экскаватор с рабочим оборудованием, формирующим траекторию движения ковша, согласно изобретению, а на фигуре 3 - перемещение оси качания 11 рукояти в системе координат, связанной с рукоятью.
Рабочее оборудование экскаватора (фигуры 1 и 2) содержит: стрелу 1, рукоять 2 с закрепленным на ней ковшом 3, канатный механизм подъема 4 и механизм напора 5. Механизм напора 5 содержит коромысло 6, шарнирно соединенное его концами со стрелой 1 и со свободным концом рукояти 2, и гидроцилиндр 8, корпус 9 которого соединен шарнирно с рукоятью 2, а шток 10 соединен шарнирно с коромыслом 6. В результате шарнирного соединения между собой рукояти 2, коромысла 6 и гидроцилиндра 8 из указанных звеньев образуется жесткая конструкция, в которой расстояние между ковшом 3, закрепленным на рукояти 2, и концом коромысла 6, шарнирно соединенным со стрелой 1, может изменяться при перемещениях штока 10 относительно корпуса 9.
Рабочее оборудование для осуществления способа согласно изобретению действует следующим образом. Траекторию движения ковша формируют от подошвы забоя (фиг.2), на которую устанавливают ковш 3, при этом рукоять 2 расположена вертикально, шток 10 гидроцилиндра 8 втянут в корпус 9. Посредством гидросистемы механизма напора, выдвигается шток 10 гидроцилиндра 8 и осуществляется близкое к линейному перемещение ковша на величину, соответствующую расчетной глубине внедрения зубьев ковша в породу. Приводя в действие лебедкой канатный механизм подъема 4, поворачивают жесткую конструкцию (рукоять 2 - коромысло 6 - гидроцилиндр 8) вокруг оси цилиндрического шарнирного соединения коромысла 6 со стрелой 1. При этом ковш 3 перемещается в вертикальной плоскости по круговой траектории, а зубья ковша 3 описывают траекторию резания, радиус кривизны которой равен расстоянию от оси поворота вышеупомянутой жесткой конструкции до зубьев ковша 3. Ковш 3 заполняется с последующей разгрузкой в транспортное средство или в отвал, и его устанавливают на подошву забоя для выполнения следующего цикла копания.
Применение предлагаемого изобретения позволит усовершенствовать механизм напора карьерного канатного экскаватора, а также упростить конструкцию стрелы и рукояти.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО КАНАТНОГО ЭКСКАВАТОРА | 2011 |
|
RU2488661C2 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2573143C1 |
| ПРИВОД НАПОРА КАРЬЕРНОГО ЭКСКАВАТОРА | 2015 |
|
RU2631062C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ КАНАТОВ КАРЬЕРНОГО ЭКСКАВАТОРА | 2018 |
|
RU2680943C1 |
| ПРИВОД НАПОРА КАРЬЕРНОГО ЭКСКАВАТОРА | 2016 |
|
RU2631060C2 |
| КОВШ КАРЬЕРНОГО ЭКСКАВАТОРА | 2015 |
|
RU2612766C2 |
| ЭКСКАВАТОР | 2011 |
|
RU2481439C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2011 |
|
RU2491389C2 |
Предложенная группа изобретений относится к карьерным экскаваторам типа «прямая лопата» с канатным приводом подъема ковша. Техническим результатом является упрощение конструкции механизма напора, при этом обеспечивается возможность регулирования траектории движения ковша. Способ формирования траектории движения ковша экскаватора осуществляют с помощью операции приведения рукояти с ковшом в возвратно-вращательное движение в вертикальной плоскости в системе координат, связанной со стрелой. При этом ось качания рукояти в указанной системе координат неподвижна. Операцию регулирования кривизны траектории осуществляют путем изменения расстояния между ковшом и осью качания рукояти. При этом неподвижную в системе координат, связанной со стрелой, ось качания рукояти перемещают в системе координат, связанной с рукоятью, по дуге окружности, центр которой находится на конце рукояти. Предложенный способ осуществляется рабочим оборудованием, содержащим стрелу, рукоять с жестко установленным на ней ковшом, канатный механизм подъема ковша и механизм напора. Причем механизм напора содержит коромысло, которое образует со стрелой и рукоятью вращательные пары, и гидроцилиндр, шток и корпус которого шарнирно соединены с коромыслом и рукоятью соответственно. 2 н.п. ф-лы, 3 ил.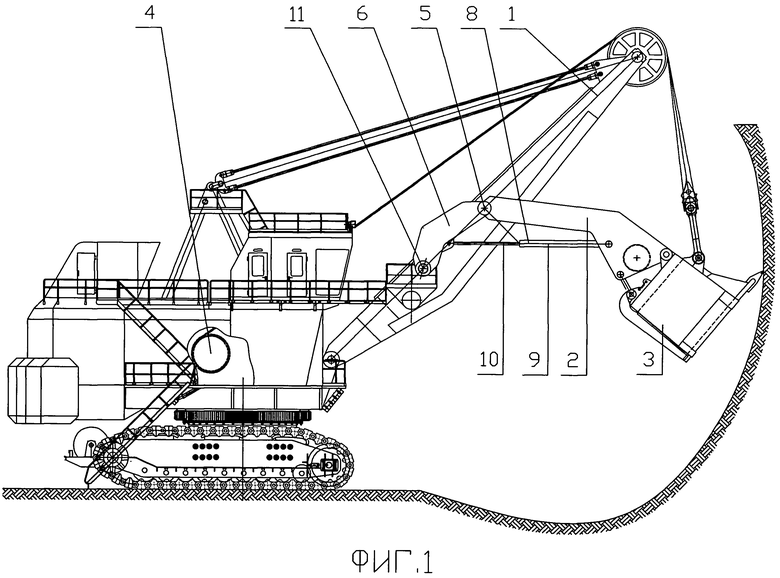
1. Способ формирования траектории движения ковша канатного карьерного экскаватора, включающий операцию приведения рукояти с ковшом в возвратно-вращательное движение в вертикальной плоскости в системе координат, связанной со стрелой, при этом ось качания рукояти в этой системе координат неподвижна, и операцию регулирования кривизны траектории путем изменения расстояния между ковшом и осью качания рукояти, отличающийся тем, что неподвижную в системе координат, связанной со стрелой, ось качания рукояти перемещают в системе координат, связанной с рукоятью, по дуге окружности, центр которой находится на конце рукояти.
2. Рабочее оборудование для осуществления способа по п.1, включающее стрелу, рукоять с жестко установленным на ней ковшом, канатный механизм подъема ковша и механизм напора, отличающееся тем, что механизм напора содержит коромысло, которое образует со стрелой и рукоятью вращательные пары, и гидроцилиндр, шток и корпус которого шарнирно соединены с коромыслом и рукоятью соответственно.
| US 3501034 А, 17.03.1970 | |||
| Рабочее оборудование одноковшового экскаватора | 1980 |
|
SU909027A1 |
| Одноковшовый экскаватор | 1976 |
|
SU616372A1 |
| Рабочее оборудование одноковшового экскаватора | 1975 |
|
SU692941A1 |
| Экскаватор | 1975 |
|
SU615873A3 |
| JP 10046620 A, 17.02.1998. | |||

