(S4) ЭКСКАВАТОР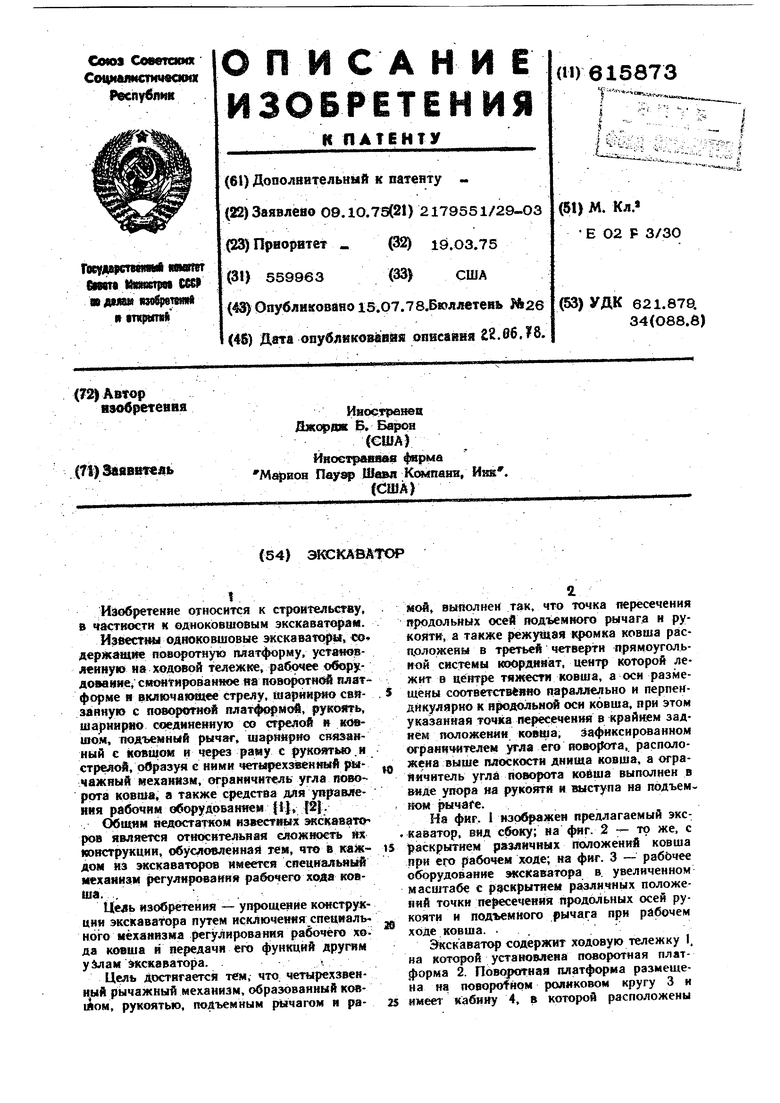
| название | год | авторы | номер документа |
|---|---|---|---|
| Бункерный ковш траншейного экскаватора | 1982 |
|
SU1059074A2 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
| Одноковшовый гидравлический экскаватор с механизмом эвакуации грунта | 1990 |
|
SU1776721A1 |
| Траншейный экскаватор | 1983 |
|
SU1121362A1 |
| Рабочее оборудование одноковшового экскаватора | 1975 |
|
SU692941A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР СИСТЕМЫ ИНЖЕНЕРА КУРКОВА | 1991 |
|
RU2005855C1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| УСТРОЙСТВО ДЛЯ ПОДКОПА ТРУБОПРОВОДОВ | 1998 |
|
RU2170307C2 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ПОГРУЗЧИКА | 1965 |
|
SU172678A1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1968 |
|
SU207811A1 |
Изобретение относится к строительству, в частиостн к одноковшовым экскаваторам.
Из8ест1Ш одноковшовые экскавато{ ц,О держащие поворотную платформу. уст8«овлеиную на ходовой тележке, pafiiOMee оборудоввине;сионтированж е на поворотной платформе и включающее стрелу, iuapHHptio свйзаяпую с поворотной платфорМ(, рукоять, шарниряо соеднненяую со стрелоб н ковшом, подъемный рычаг, шарнярмо связанный с kontuoM и через раму с рукоятью .и стрелой, образуя с ними четырехзвенныА р1я чажяый механизм, ограничитель угла поворота ковша, а также средства дяя управления рабочим 0борудован1тем{1|,|2}. . Общим иедосгап(ом известных жскавато ров является относнтельиая сложность их моиструкции, обусдовлеинай тем, что & каждом из экскаваторов имеется специальиый механизм регулирования рабочего хода ковша.... . . . .. .
Цель изобретения - упрощение конструкции экскаватора путем исключения спедиальиого механизма регулирования рабочего хо. да ковша и передачи его функций другим у ам экскаватора.
Цель Достигается тем, что. четырехзвеииый рычаЖмы) механизм, образованный ковийом, рукоятью, подъемным {шчагом и рамой, выполнен так, что точка пересечения продольных осей подъемного рычага и рукояти, а также режущая кромка ковша расположены в третьей четвертн прямоугольной системы 1к ордни)ат, центр которой лежит в центре тяжести ковша, а оси размещены соответсгвйяио (тараллельно и перпендикулярно к продольной оси ковша, при этом указанная точка пересечения в крайнем заднем положении ковша, зафнкснрованном ограничителем угла его поворота, расположена выше плоск хгги дннща ковша, а ограйячитель угла поворота ковша выполнен в виДе упора на рукояти и выступа на подъем. : шш рычаге.
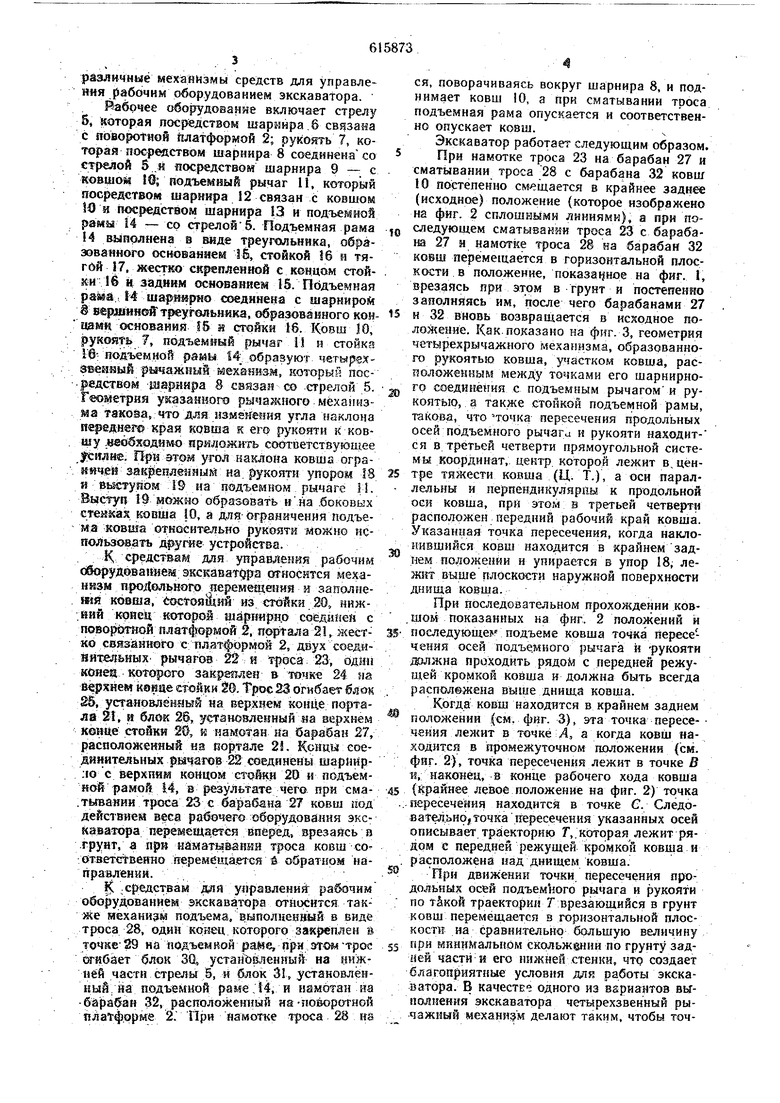
На фиг. 1 изображен предлагаемый экс. каватор, вид сбоку; и а фиг. 2 - то же, с
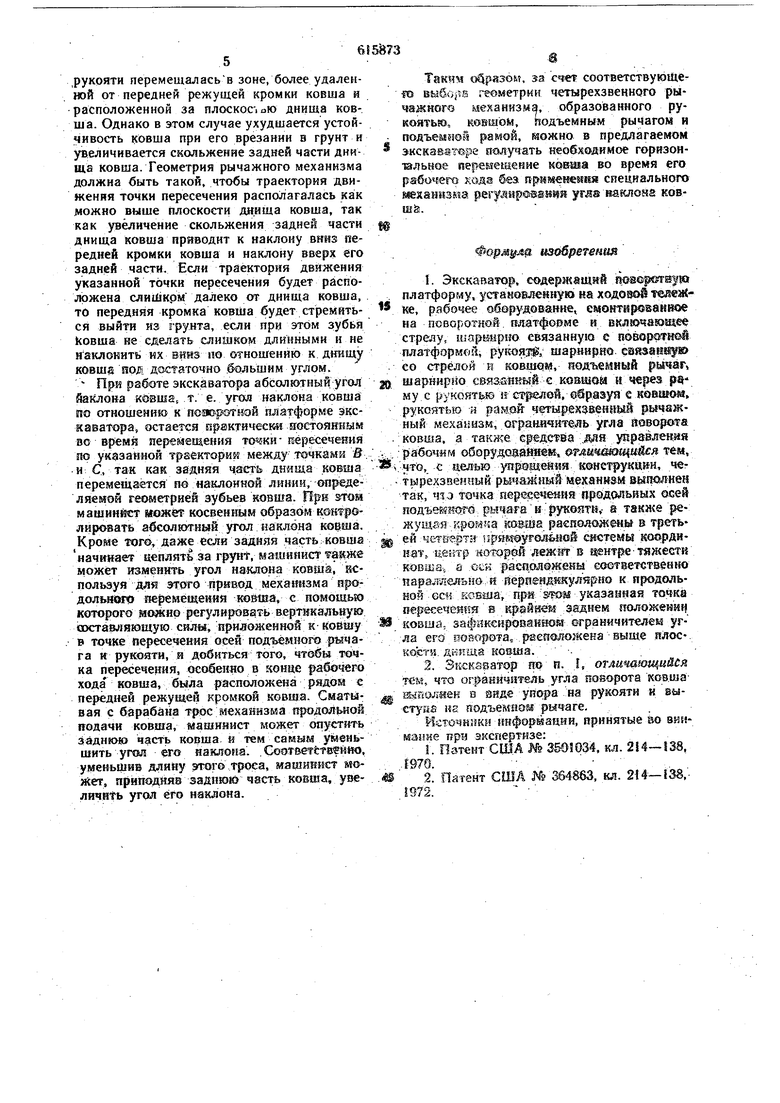
раскрытием различных положений ковша при его рабочем ходе; на фиг. 3 - рабЬчее оборудование экскаватора в. увеличенном масштабе с раскрытием различных положений точки пересечения продбльных осей рукоятн и подъемИого рычага при рйбочем ходе ковша. . ,
Экскаватор содержит ходовую тележку I. на которой установлена поворотная платформа 2. Пово гатная платформа размешена на пoвopofИoм роликовом кругу 3 н
5 имеет кабину 4, в которой расположены
азличные мехаййзмы средств для управления рабочим оборудованием экскаватора.
Йабрчее оборудование включает стрелу , которая досрйдством шарнира.б связана с «oBopotHofi платформой 2; рукоять 7, которая посредством шарнира 8 соединена со трелой S .я посредством шарнира 9 - с . ковшой Ш; подъемный рычаг 11. который посредством шарнира 12 связан с ковшом Ш и посредством шарнира 13 и подъемной рамы 14 - со стрелойб. Подъемная рама ,Q И выполнена в треугольника, образованного основанием 16, стойкой J6 н тягой 17. жестко ск|)еплейной с концом стойки 16 н задннм основанием 15. Подъемная рама.: f4 о едннена с шарниро1( k sepjfiHHeff треугольника, образованного кон- 15 цамк основания f6 м стойки 16. Ковш J О, рукоять 7, подъемный рычаг 11 и стойка Ш; подъемной рамы 14 образуют ч«тыр§з(Зееизшй рычажный меха1жзм, который посредством шарнира 8 евшая со стрелой 5. Геометрия указанного рычажного механизма такова, что для измене шя угла наклона переднего края ковша к его рукояти к ковшу .«еобходймо приложить соответствуюицее . при атом угол наклона ковша ограййч.ей закр еплеиный на. рукояти упором 18 25 и выстуном 19 на подъемном рычаге 11. Выс-гуп 19 можно образовать ина .боковых стейках ковша 10, а длй ограничения подъема ковша относительно рукояти можно использовать другие устройс1ва.-
К, средствам для унравленйя рабочим оборудованием 3KCKaBat(jpa ртяосится механизм продольного 11еремещения и заполнения ковша, йостояЙ ий из стойки 20, нижйий крнец которой шарнирнр со1ЕДиней с поворбтйой платформой 2. noptas a 21. жест- 15ко связанного с плат |юрмой 2, двух соеднйитедьиых рычагов 22 и троса 23, один кбией которого закреялей в точк« 24 на верхнем квййе стойки 20. Трос23 огнбаег бйом . 2, устанрвлёнйьтй на верхнем конае портала 21, и блок 26, уетановлеиный на верхнем ® конце стойки 29, и намотан йа барабан 27, расположенный на кортале 23. Концы соединительных ричагов 22 шедянены шарийр;ю с верхним концом а-ойки 20 и подъемкой рамой 14, в результате чего при сма- 45 .тывавии троса 23 с бара&ана 27 ковш под действием весе рабочего оберудовання эксКава1ч ра перемещается вперед, врезаясь s .грунт, а при нанатыйаийй троса ковш со ответствеяно ггерембщаетея и обратном направлении.
1( .средствам дай управлений рабочим оборудованием экскаватора относится также механизм подъема, выполненвый в виде троса 28, один конец которого закреплен и точке-29 на подъемйой раме, при этом-трек 55 огибает блок за, устанЬйленныЙ на нижней части стрелы §, и блок 31, установленный «а подъемной раме J4, и намотан на бй|рабаи 32, расположенный на-поворотной пАатф.ррме 2. При намотке троса 28 на
ся, поворачиваясь вокруг шарнира 8, и поднимает ковш 10, а при сматывании троса подъемная рама опускается и соответственно опускает ковш.
Экскаватор работает следующим образом.
При намотке троса 23 на барабан 27 и сматывании троса 28 с барабана 32 ковш 10 постепенно см-ещается в крайнее заднее (исходное) положение {которое изображено на фиг. 2 сплошными линиями), а при последующем сматывании троса 23 с барабана 27 н намотке троса 28 на барабан 32 ковш переметается в горизонтальной плоскости в положение, показанное на фиг. I, врезаясь при этом в грунт и постетенно заполняясь им, после чего барабанами 27 и 32 вновь возвращается в исяодное положение. Как. показано на фиг. 3, геометрия чстырехрычажного механизма, образованного рукоятью ковша, участком ковша, расйоложенным между точками его шарнирного соедИ1геиия с подъемным рычагоми рукоятью, а также стойкой подъемной рамы, такова, что точка пересечения продольных осей подъемного рычага и рукояти находится в третьей четверти прямоугольной системы координат, ц€Н1р. которой лежит в, центре тяжести ковша (Ц. Т.), а оси параллельны и перпендикулярны к продольной оси ковша, при этом в Т1эетьей четверти расположен передний рабочий край ковша. Указанная точка пересечения, когда наклонившийся ковш находится в крайнем заднем положении н упирается в упор 18, лежит выше плоскости наружной поверхности даища ковша. ,
При последовательном прохождении ков. шом показанных на фиг. 2 положений и поел еду подъеме ковша точка Пересечения осей подъе.много рычага н -рукояти должна проходить рядом с передней режущей кромкой ковша и должна быть всегда располежена выше днища ковша.
Когда ковш находятся в крайнем заднем положении (см, фиг. 3), эта точка Пересенения лежит в точке Л, а когда ковш находится в промежуточном положении fcM. фйГ. 2), точка пересечения лежит в точке В и. наконец, 8 конце рабочего хода ковша (крайнее левое положение на фиг. 2) точка .пересечения находится в точке С. Следовательно точка пересечения указанных осей описывает траекторИ1д Г,.которая лежит рядом с передней режущей кромкой ковша и расположена иад днищем ковша.
При движении точки пересечения продольных осей подъемиого рычага и рукояти по т&коЙ траекторииТ врезающийся в грунт иовш перемещается з горизонтальной плоскости на сравнительно большую величину при минимальном скрльж(знни по грунту задг ей части и его нижней стенки, что создает благоприятные условия для работы экскаватора. В качестве одного из вариантов выполкекггя экскаватора четырехзвенный рычажиый механй; м делают таким, чтобы точ,рукоятн перемещаласьв зоне, более удаленной от передней режущей кромки ковша н расположенной за плоское. оЮ днища ковша. Однако в этом случае ухудшается устойчивость ковша при его врезании в грунт и увеличивается скольжение задней части днища ковша. Геометрия рычажного механизма должна быть такой, чтобы траектория движения точки пересечения располагалась как можно выше плоскости днища ковша, так как увеличение скольжения задней части днища ковша приводит к наклону вннз передней кромки ковша и наклону вверх его задней части. Если траектория движения указанной точки пересечения будет расположена слишком далеко от днища ковша, то передняя кромка ковша будет стремиться выйти из грунта, если при этом зубья Ковша не сделать слишком длинными и не наклокитй их внад но отношению к диищу ковшз яод достаточно .большим углом. При работе экскаватора абсолютный угол йаклона кйвша, т. е. угол наклона ковша по отношению к поэо-рш-шй шштформе экскаватора, остается практически постоянным во аремй перемещения точки пересечения по указайной траектории между точками 0. и С, так как задняя днища ковша перемещается п0 маклоиной линии, определяемой геометрией зубьев ковша. При этом машинкст MOiKet косвенным образом контролировать абсолютный угол наклона ковша. Кроме tore, даже если задняя часть-ковша начинает аепяять за грунт, машинист шйже мож1ЕТ изменить угол наклона ковща, вспользуя для 9Т0ГО привод мехашзма nfoдольяого йеремёщейия ковша, с помощью которого моданр регулировать вертйкалыгукг охпгавляющую СЙЛ1Й, приложенной к койшу в точке пересечения осей подъемиого рычага и рукояти, и добиться того, чтобы шчка пересечения, особенно в гзднце | а6очего хода ковша, была расположена рядом е передвдй режущей кромкой ковща. Сматывая с барабана трос механизма продольной додачи ковша, машийист может опустить заднюю часть ковща и тем уменьшить угол его наклона. . СоотеетЬтй ийо, уменьшив длину этоге троеа, машинист может, приподйяв задний часть ковша, увеличиtь угол его наклона. Такям , за счет соответствующего выбо; л геометрии четырехзвенного рычажнот механизма, образованного рукоятью, , подъемным рычагом и пойъе8151оГ рамой, йожно в предлагаемом экскаваторе налуч ать необходимое горизонтальное rseffesaeiaesHe ковша во время его рабо его к&т без п-рншиеиня сиециальнога шханизма регудирФэ®й8|й угла ваклома ковuiSi. . Фcff}мyл u3Q6f eTefiUM 1. Экскаватор, содержащий маорс гsjia платформу, устаковлемнук на ходовое тевеаСке, рабочее об©руд©ванне, емонтйроганвое на псвороткой вдатформе и вклк чаю®ее стреяу, шаршрио связанную е поворотией платформ), рутаяз,, шарнйрно. саязаи ю со стрелой н KOBfflQM, подъемный ршаг шарннртю связаяшяй е ковщоа и через psму.с рукойтш R стрелой,йр.азуз е ковшой, рукоятью н рамой четырехзв й |йй рычажный механизм, ограничитель угла йовор&та ковша, а также средства ,длй увравледая рабочй.м оборудоаэше, тбм, что, с а«ЛЫ9 упрэщейня конетрукаш, четырехзвенаый рычажный механизм аышлнеи так, 43 э течка нерееечейиа|ф©додьйЫ8 осей яодъвкш го, рычаганрукеятй,- s также режущая кройг-га ш&ша раеподажекы в третьей четггерт.ч иряадугольаой шетемы координа % sf.eKTp «oT-of ейЛежит в «ентре-тяжестм ковша, а OC5V раешлегкека соетщетствегию параллельн&.й йёрпендикулярно к продольной ecu jiosjua, прк аша указанная точка перееечейкя в крэйкек положении ковша, saф5 кeйpOйaнйoй ©гравицителем угла era иойорота,. раеаелогкена Быще ялос-. КОСТ55. коеша. . . 2. Зкскаратор ар н. I, отличающийся rejvs, что ог| аш читель угла поворота ковша щйшшеи а Виде уйора -на рукояти к выCTyfifi на подъеМйОй рыгаге. . Маточнажй йнформаийи, принятые во внималне ирн экспертизе: . Патент США № 3505034, кл. 2И--138, Г970. . 2. Патент США № 364863, кл. 214-138, 1972.
