1
Изобретение относится к землеройной технике и может быть применено на одноковшовых экскаваторах при рытье траншей и котлованов с одновре:менной зачисткойи планировкой их дна.
Известно рабочее оборудование гидравлического одноковшового экскаватора, включанадее стрелу, рукоять, ковш, с режущей крокксй, стойки, цилиндр коррекции и тягу, в котором с целью обеспечения прямолинейного перемедения реж.ущ€й кромки ковша под любым углом к горизонту, стойка шарнирно закреплена на оси поворота стрелы, на которой, также установлен рычаг, соединенный с цилинд5 ом коррекции, шток которого связан со стойкой, причем один конец тяги закреплен в месте соединения цилиндра коррекции с рычагом, а другой - на рукояти {11
Однако это устройство недостаточно точно планирует дно траншей и котлованов .
Известно также рабочее оборудование одноковшового экскаватора, включающее рукоять с ковшом, стрелу, стойки, шарнирно смонтированный на стреле средней частью рычаг и шарнирно .соединяющую рычаг с рукоятью тягу 2
Данная конструкция содержит шарнирный четырёхзвенник типа пантографа, элементами которого являются стрела, ковш с рукоятью и два дополнительных звена: рычаг, шарнирНо установленный на стреле и тяга, соединяющая конец рычага с. рукоятью. Размеры звеньев четырехзвенника выбраны т;аким образом, что одна из точек рычага . в про0цессе работы описывает траекторию, геометрически подобную траектории движения режущей кромки ковша.-. Рычаг опирается на укреплённый на платфорWe экскаватора копир, рабочая 11оверх5 ность которого воспроизводит в-определенном масштабе заданную отрабатываемую поверхность грунта. Копир cpfeдинен с датчиком, который при нажатии рычага на копир регистрируют отклоне0 ния соответствующей точки рычага, а следовательно, и отклонения режущей кромки ковша от заданной траектории. Сигнал об этих отклонениях подаете датчиком на органы управления рабо5 чими механизмами экскаватора, с помощью которых Корректируется движение ковша. Таким образой, устройства подобного типа представляет собой автомат «чески-е-систем с обратной связью;
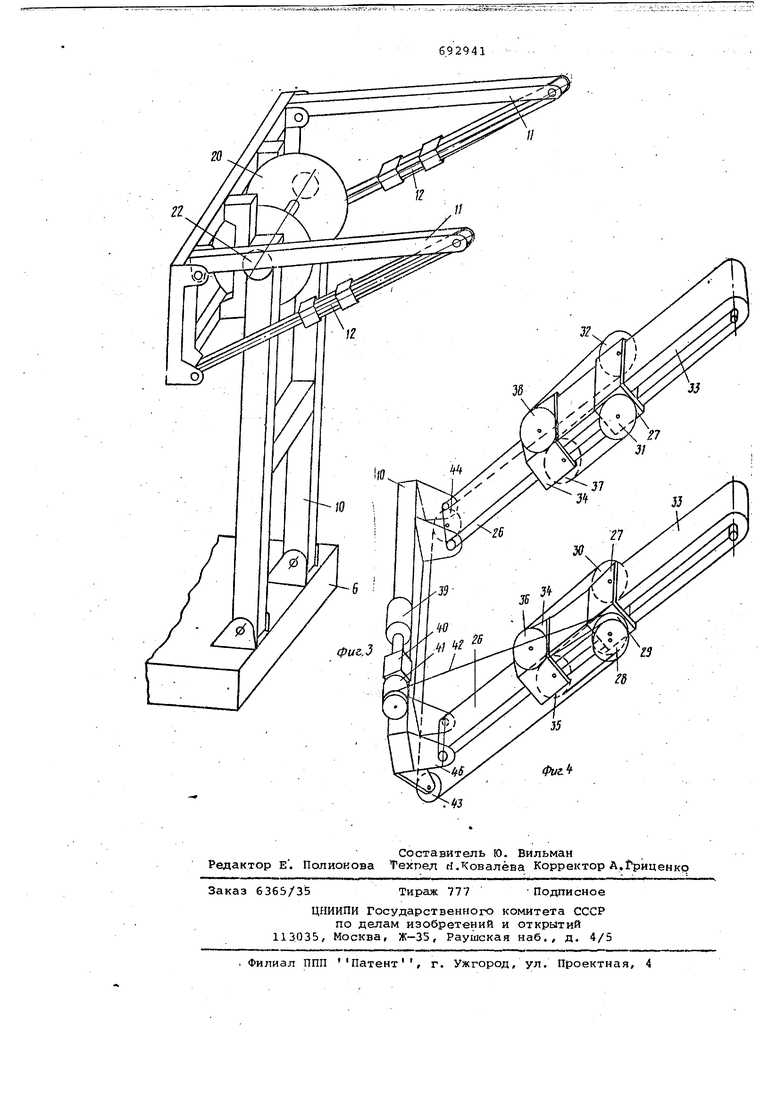
0 обычно механогидравлические или мейайоэлектрогидравлические, в зависИ мости от типа датчиков и исполнительных органов механизмов экскаватора. К недостаткам таких устройств при использовании их в условиях работы экскаваторов относятся повышенные тре бования к эксплуатации и недостаточная наделсность. Использование подобных устройств без элементов автоматики в качестве механических систем, передающих вес оборудования через ры чаг на копир, практически не осущест вимо из-за того, что копир в этом случае по условиям прочности приобре тает весьма большие разме эы и не может быть размещен в свободной зоне между стрелой и- ходовым оборудованием экскава тора. Целью изобретения является упроще ние эксплуатации рабочего оборудования при планировке грунтовых поверхностей и повышение его надежности. Для этого рычаг своим нижним концом соединенпосредством гибкой связи с закрепленным на стойке экскаватора кронштейном, выполненным из двух соединенных между собой шарнирных Звеньев, одно из которых выполне но телескопическим и оборудовано механизмом раздвижеНия, а тяга, соединяющая смонтированный на стреле рычаг с рукоятью, шарнирно присоединена к последней посредством промежу-. точного звена, которое шарнирно связано с упором, жестко закрепленным на рукояти. На фиг. 1 показано прилагаемое рабочее оборудование, общий вид; на фиг. 2 - стрела и рукоять с элементами конструкции; на фиг. 3 - стойка с элементами конструкции; на фиг. 4 телескопическое звено и механизм раз движения. Рабочее оборудование одноковшового экскаватора включает ковШ 1 с рукоятью 2, оборудованной дополнительным шарнирным звеном-3 и упором 4; стрелу 5, укрепленную на поворотной платформе б экскаватора и соединенную передним концом с рукоятью; рычаг 7, установленный на стреле с воз можностью поворота в вертикальной Плоскости и соединенный с рукоятью посредством ,тяги 8 и дополнительного звена 3; упор 9, установленньй на стреле и ограничивагаций угол поворота рычага 7; стойку 10, установленную на поворотной платформе б; ук-репленный на стойке кронштейн, сос.тояший из двух шарнирно соединенных между собой Звеньев рычага Ц и теле скопического Звена 12; механизма выдвижения телескопического звена 13 в виде канатного полиспаста (гидроцилиндра) в зависимости от привода экс каватора; гибкого звена 14, соединяющего нижний конец рычага 7 с рычаго 11 кронштейна стойки; тягового полипаста, сбстЪШего из каната 15 и Блоов 16 на ковше и 17 на стреле; подъ- емного полиспаста, состоящего из подъемного каната 18, блоков 19 на рукояи и 20 на стойке; полиспаста наклоа стойки, состоящего из каната 21, локов 22 на стойке и блоков 23 и 24на двуногой стойке 25. Телескопическое звено 12 состоит, из нижних стержней 26, установленных шарнирно -в проушинах стойки и снабженных обоймами 27 с блоками 28, 29/ 30, 31 и 32 и верхних вьздвижных стержней 33, оборудованных обоймами 34с блоками 35, 36, 37 и 38. Каждый верх НИИ стержень соединен своим передним концом посредством шарниров с рыча- гом 11. .Нижние и верхние стержни обхватывают один другого своими обоймами и образуют поступательные пары.Канатный механизм 13 вьщвижения телескопических звеньев представляете ссбой установленные на элементах стойки 10 двигатель 39, редуктор 40 и канатный барабан 41, на котором закреплен- канат 42. Канат 42 сходит с барабана и огибает последовательно блоки 29, 35, 30, 36, 28, направляющие блоки 43,и 44, установленные на стойке 10, затем блоки 32, 38, 31, 37 и закреплен своим концом на одной из обойм 27. Шарнирное звено 3 присоединено к неподвижно установленному на рукояти упору 4 с возможностью поворота в вертикальной плоскости. Звено 3 оперто еврей верхней стороной в упор 4 ; см.фиг.1) и удерживается в этом попоЖении под действием растягивающего у ,еилия 3 тяге 8, которая присоединена своим передним концом к свободному -концу звена 3, а также под действием вспомогательной пружины -5, связы вающей звено 3 и упор 4. При переходе тяги 8 в процессе поворота рукояти через такое положение, когда тяга 8 и шарнирное звено 3 располагаются на ОДНОЙ прямой, что происходит .в конце планировочного хода ковша, звено 3 поворачивается и отходит от упора, как это показано на фиг. 2. При повороте рукояти вперед в исходное положение пружина 45 способствует удержанию звена 3 в доведенном до упора положа- . НИИ. Стойка 10 своим нижним концом шарнирно присоединена к платформе экскаватора 6, как показано нафиг;3. Верхний конец 10 соединя ется с двуногой стойкой 25 экскава- ,тора спомощью каната 21 и блоков 22, 24 (фиг. 1). Телескопическое звено 12 и рычаг 11 соединены со стойкой шарнирно, с помощью специальных про-ушин 46, укрепленных на элементах стойки. Передние концы элементов 12 ,и 11 соединены шарнирно между собой.
5 Работает экскаватор с предлагаемым оборудованием следующим образом. После установки экскаватора на рабочем месте, перед началом разработки элемента забоя, оборудование настраивается: проверяется и корректируется с помощью каната 21 угол на Тклона стойки 10; ковш 1 устанавливается на заданной отметке, опираясь своей режущей КРОМКОЙ на спланирован ный с предыдущей установки экскавато iра участок дна траншеи,или ппи разра -ботке пионерского элемента забоя - н специально спланированную, с геодези ческой проверкой, поверхность на заданной отметке; гибкое звено 14 натя гивается и стопорится в натянутом по ложении с помощью механизма выдвижения 13 телескопического звена 12. После настройки осуществляется обычное .-йопайие грунта,- с недобором до проектной отметки дна на 10-15 см. При этом гибкое звено 14 провисает, а рычаг 7 и тяга 8 перемещаются вхолостую. Затем - дно траншеи зачищается и Планируется для чего ковш 1 опу кается на спланированную с предьщущей установки экскаватора по;верхность дна, подъемный канат 18 ослабляется и под действием тягового каната 15, при натянутом гибком звене 14 осуществляется планировочное движение ковша. Прямолинейность движения ковша обеспечивается соответствующим выбором размеров звеньев четырехзвенного механизма, положения точки подвески гибкого звена 14 и его длины. Как показали исследования модели и экспериментального образца оборудования, отклонения режущей кромки ковша от прямолинейной траектории, при соответствующем выборе указанных размеров не превышают 20-25 мм. В конце планировочного хода рукояти с ковшом рычаг 7 доходит до упора 9, дополнительное звено 3. отходит
f 92Q41
от упора 4, чем обеспечивается,дальнейший свободный поворот рукояти 2 при неподвижном рычаге 7. Изменение угла наклона планируемой поверхности достигается путем соответствующего изменения наклона стойки 10. Выдерживание отметки дна траншей обеспечивается установкой режущей . кромки ковша в начале каждого цикла планировки на спланированной с предыдущей установки поверхности, с периодической геодезической проверкой. Формула изобретения Рабочее оборудование одноковшового экскаватора, включающее рукоять с ковшом, стрелу, стойки, шарнирно смонтированный на стреле средней частью рычаг и шарнирно соединяющую рычаг с рукоятью тягу, отличающ .е е с я тем, что, с целью упрощения эксплуатации рабочего оборудования при планировке грунтовых поверхностей и повышения его надежности, рычаг своим нижним концом соединен посредством гибкой связи с закрепленным на стойке экскаватора кронштейном, выполненным из двух соединенных между собой шарнирных звеньев, одно из которых выполнено телескопическим и оборудовано механизмом раздвижения, а тяга, соединяющая смонтированный на стреле рычаг с рукоятью, шарнирно присоединена к последней посредст вом промежуточного звена, которое шарнирно связано с упором, жестко закрепленным на рукояти. Источники информации принятые во внимание при экспертизе 1.Авторское свидетельство СССР №386081, кл. Е 02 F 3/42, 1971 2.Авторское свидетельство 219457, кл. Е 02 F 9/20, 1970 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Рабочее оборудование экскаватора | 1974 |
|
SU868010A1 |
| Гидропривод экскаватора | 1981 |
|
SU1028792A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU238413A1 |
| Рабочее оборудование гидравлического экскаватора | 1984 |
|
SU1173011A1 |
| Рабочее оборудование экскаватора обратная лопата | 1977 |
|
SU751912A1 |
| Рабочее оборудование одноковшового экскаватора | 1979 |
|
SU777164A1 |
| Механизм управления гидравлическим экскаватором | 1982 |
|
SU1027352A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1969 |
|
SU626168A1 |