Область техники, к которой относится изобретение
Изобретение относится к автоматической механической трансмиссии (АМТ) и к управлению такой АМТ. Более точно, изобретение относится к таблице управления выбором передачи в такой АМТ.
Уровень техники
В последние годы все большее распространение получают автоматические механические трансмиссии (АМТ), которые в наше время являются обычным компонентом многих транспортных средств. Функция автоматического переключения передач упростила процесс вождения для водителя, которому не приходится прилагать усилия для выбора правильной передачи, и он может сосредоточиться на вождении и окружающем движении. Система автоматического переключения передач, такая как АМТ, в частности, имеет большую ценность для автомобилей для тяжелых условий эксплуатации.
Для управления автоматической системой предлагался ряд стратегий управления и таблиц со схемами переключения передач. В патентах US 5067374 и US 4841815 описано применение нечеткой логики выбора передач. В патенте US 4922428 описана обучающая система для усовершенствования схемы переключения передач. В заявке US 2007/0254774 описана система выбора между ручным режимом переключения и автоматическим режимом переключения или различными автоматическими режимами переключения. Также известно применение различных схем переключения передач в зависимости от различных параметров, что описано, например, в патенте US 6519520, заявке US 2006/0155447, патенте US 5911771 или патенте US 6182000.
Хотя в указанных документах описаны различные системы управления автоматической трансмиссией, остаются нереализованными некоторые пожелания относительно эффективности систем такого рода при работе в широком диапазоне условий эксплуатации. Соответственно, в основу настоящего изобретения положена задача приспособления оснащенного АМТ транспортного средства с целью обеспечения удовлетворительной работы при увеличенном многообразии условий.
Раскрытие изобретения
В настоящем изобретении предложена новая система силовой передачи транспортного средства (далее - автомобиль) и способ усовершенствованного управления автоматической механической трансмиссией (АМТ). Соответственно, настоящее изобретение относится к силовой передаче автомобиля и к предложенной в изобретении системе, в которую входит главное автоматическое сцепление, ступенчатая коробка передач и блок управления, выполненный с возможностью управления главным сцеплением и ступенчатой коробкой передач.
Блок управления запрограммирован на генерацию управляющего сигнала, отображающего выбор желаемой передачи. Блок управления содержит по меньшей мере два различных набора алгоритмов управления выбором передач для генерации управляющего сигнала выбора передач, при этом различные алгоритмы управления запрограммированы на генерацию различных управляющих сигналов выбора передач на основании входных данных, т.е. одни и те же входные данные обеспечивают отличие по меньшей мере одного состояния входных параметров управляющего сигнала выбора передач. Блок управления дополнительно соединен с переключателем алгоритма управления выбором передач, указывающим, какой набор алгоритмов управления выбором передач следует использовать блоку управления. В число по меньшей мере двух различных алгоритмов управления выбором передач входит по меньшей мере первый алгоритм управления выбором передач, предназначенный для использования в нормальном режиме, соответствующем условиям обычной дороги, например, в случае стратегии управления, обычно применяемой в автомобиле, когда не выбрана какая-либо конкретная стратегия или программа.
В соответствии с настоящим изобретением алгоритмы управления выбором передач содержат второй алгоритм управления выбором передач, предназначенный для использования в режиме езды по мягкой поверхности. Термин "режим езды по мягкой поверхности" используют, например, когда автомобиль движется по песку, например, в пустыне. Разумеется, этим термином могут обозначаться другие сходные условия в том, что касается по меньшей мере свойств или характеристик силовой передачи и колес, когда этот режим также может применяться, например, при движении по рыхлому снегу или жидкой грязи. Соответственно, этот режим предполагает различного рода условия при наличии мягкой поверхности, например, поверхности, содержащей твердые частицы или рыхлый материал определенного рода, в результате чего снижается сцепление ведущих колес, и ухудшаются ходовые характеристики из-за присущего рыхлому материалу свойства, которое выражается в том, что колеса "проваливаются" внутрь поверхности, а материал поверхности не сохраняет целостность при воздействии на поверхность усилия, например, со стороны ведущих колес. Следовательно, имеет смысл приспособить систему управления или управляющие сигналы выбора передач к отличающимся условиям, поскольку режим нормального управления не обеспечивает удовлетворительного управления системой силовой передачи в определенных экстремальных условиях. Например, когда автомобиль, например, автомобиль большой грузоподъемности (автомобиль для тяжелых условий эксплуатации), оснащенный АМТ, движется по пустыне и преодолевает подъем, сопротивление движению является значительно большим, чем при преодолении подъема такой же крутизны, но с асфальтовым покрытием. Без приспособления к изменившимся условиям будет использоваться слишком высокая передача, и автомобиль не сможет преодолеть соответствующий подъем. При понижении передачи весьма вероятно, что колеса начнут пробуксовывать в течение по меньшей мере короткого времени из-за того, что рыхлый песок легко вызывает проскальзывание, и в результате этого коробка передач снова переключится на нежелательную более высокую передачу. Этот сценарий может повторяться несколько раз, при этом автомобиль по существу не будет двигаться вперед, и, если подъем является достаточно крутым, вероятно, полностью остановится. Соответственно, существует потребность в другом режиме стратегии переключения передач, который более приспособлен к этим условиям и обеспечивает безопасное и плавное движение автомобиля, оснащенного АМТ, при увеличенном многообразии условий.
В одном из вариантов осуществления изобретения второй алгоритм управления выбором передач запрограммирован на осуществление перехода на выбранную более высокую передачу при более высокой частоте вращения двигателя, чем в случае применения алгоритма управления выбором передач в нормальном режиме. Если, например, в нормальном режиме переключение передачи прогнозируется и осуществляется, например, при частоте вращения двигателя 1600 об/мин, уровень для переключения может быть повышен до 1900 об/мин.
Согласно еще одному варианту осуществления, который может применяться отдельно или в сочетании с описанным выше вариантом осуществления, переключение передач может предусматривать промежуточные ступени. Если, например, в коробке передач с 12 передачами переднего хода передачи переключаются ступенчато по схеме 2-5-8-10-11-12 согласно нормальному режиму переключения передач при повышении передачи со 2 до 12, в режиме езды по мягкой поверхности может использоваться, например, схема переключения 2-4-6-8-9-10-11-12. Следовательно, при переключении с низшей возможной передачи на высшую возможную передачу в режиме езды по мягкой поверхности в схеме переключения передач используется больше переключений, чем в нормальной схеме переключения передач, если в обеих схемах используются одни и те же низшая и высшая передачи. В приведенном примере при переключении со 2-й передачи на 12-ю передачу в режиме езды по мягкой поверхности используются на два переключения больше, чем в нормальном режиме.
На первый взгляд, предлагаемая схема переключения передач может показаться сходной со схемами переключения передач в режиме спортивной езды или аналогичном режиме. Тем не менее, между режимом езды по мягкой поверхности и таким режимом спортивной езды существуют некоторые существенные различия. В режиме езды по мягкой поверхности схема переключения передач оптимизирована таким образом, чтобы обеспечивать достаточно высокую движущую силу для предотвращения остановки автомобиля или необходимости понижения передачи. В режиме спортивной езды переключение передач оптимизировано таким образом, чтобы обеспечивать оптимальное ускорение автомобиля. Кроме того, эта схема переключения передач в режиме езды по мягкой поверхности рассчитана на тяжелые автомобили и автомобили общего назначения, такие как грузовики и т.п., которые имеют силовую передачу и коробку передач повышенной сложности, содержащую систему передач с интервалом между передаточными числами, основную коробку передач и демультипликатор, которым управляет электронный блок управления с целью автоматического переключения передач. Режим спортивной езды обычно предусмотрен в стандартных автомобилях, таких как автомобили, имеющие другую коробку передач и другое предполагаемое использование в качестве семейного автомобиля.
В еще одном варианте осуществления алгоритм управления выбором передач также может зависеть от угла поворота рулевого колеса таким образом, что при увеличенном угле поворота рулевого колеса повышается предел частоты вращения двигателя для переключения передачи. В частности, повышение передачи может быть не разрешено, если угол поворота рулевого колеса превышает заданный предел. Другой возможностью является передача команды понижения передачи, если угол поворота рулевого колеса превышает определенный предел. Соответственно, угол поворота рулевого колеса может эффективно применяться в качестве одного из нескольких входных параметров, которые в целом определяют стратегию управления переключением передач при езде по мягкой поверхности. Например, при угле поворота рулевого колеса, соответствующем радиусу поворота в 100 метров, увеличение предела частоты вращения двигателя для переключения передачи может равняться нулю. В отличие от этого, при угле поворота рулевого колеса, соответствующем радиусу поворота в 20 метров, увеличение предела частоты вращения двигателя для переключения передачи может составлять 200 об/мин.
В одном из вариантов осуществления алгоритмом управления выбором передач переключатель управляет вручную таким образом, чтобы можно было вручную выбирать упомянутый второй алгоритм управления выбором передач, т.е. режим езды по мягкой поверхности. Разумеется, также может быть предусмотрена функция автоматического включения/выключения в зависимости от внешних условий или сочетание этих систем, например, режим автоматического выбора или режим, в котором водитель специально выбирает переключение передачи или режим переключения передач для использования.
Блок управления может быть связан или может содержать справочную таблицу или математическую формулу, используемую для генерации управляющего сигнала выбора передач.
Кроме того, в одном из дополнительных вариантов осуществления изобретения система также может иметь функцию расчета или вычисления величины сопротивления движению на основании данных, поступающих от соответствующих известных из техники датчиков, за счет чего система управления автомобиля может прогнозировать, когда силовая передача должна управляться согласно второму алгоритму управления выбором передач, т.е. в режиме езды по мягкой поверхности, и когда она должна управляться согласно другому алгоритму управления выбором передач, например, в нормальном режиме. Решение о выборе режима может приниматься путем установки уровня сопротивление движению, при превышении которого будет выбран режим езды по мягкой поверхности, если сопротивление движению превышало этот уровень в течение определенного времени. Сопротивление движению может рассчитываться, например, путем измерения тягового усилия (с помощью датчика количества впрыскиваемого топлива или датчика крутящего момента), массы и ускорения автомобиля и с использованием известного уравнения Ftractive-Fresistance=m*a, в котором Ftractive означает тяговое усилие, Fresistance означает сопротивление движению, m означает массу автомобиля и а означает ускорение автомобиля. С целью получения более точной величины сопротивления движению расчетная величина сопротивления движению может сравниваться с величиной усилия преодоления подъема, которое может рассчитываться с использованием датчика уклона дороги.
Согласно еще одному варианту осуществления, который может применяться с ранее описанными вариантами осуществления, когда силовая передача управляется согласно второму алгоритму управления выбором передач, нарастание крутящего момента при переключениях передач является более быстрым, чем при управлении согласно первому алгоритму управления выбором передач. Эта функция может использоваться, когда поверхность, например, рыхлый песок не обеспечивает прочного сцепления, и, несмотря на достаточно быстрое включение передачи, происходит определенная пробуксовка на мягкой поверхности, и противодействующая сила, влияющая на силовую передачу и коробку, является достаточно плавной. За счет более быстрого нарастания крутящего момента сокращается время переключения, т.е. время, на протяжении которого прерывается подача мощности на ведущие колеса, и, соответственно, повышаются шансы на успех при повышении передачи в условиях крутого подъема.
Режим езды по мягкой поверхности также должен допускать достаточную пробуксовку до понижения передачи и не должен предусматривать функций реагирования на пробуксовку или по меньшей мере должен допускать значительно большую пробуксовку колес, чем допускается в нормальном режиме. Это объясняется тем, что колеса будут предположительно пробуксовывать на мягкой поверхности.
В настоящем изобретении также предложен способ управления силовой передачей автомобиля. Способ отличается тем, что включает:
определение состояние дороги;
если установленное состояние дороги соответствует нормальным дорожным условиям, применение первого алгоритма управления выбором передач, предназначенного для нормального режима езды, соответствующего условиям на обычной дороге;
если установленное состояние дороги соответствует дорожным условиям езды по мягкой поверхности, применение второго алгоритма управления выбором передач, предназначенного для режима езды по мягкой поверхности, соответствующего условиям на дороге с мягкой поверхностью.
Дополнительными вариантами осуществления способа включают упомянутые варианты осуществления системы силовой передачи.
Изобретение дополнительно относится к автомобилю, оснащенному такой силовой передачей, как описана выше. В частности, эта силовая передача применима в автомобиле для тяжелых условий эксплуатации, таком как грузовик.
В одном из вариантов осуществления изобретения предложена упомянутая силовая передача, коробка передач с интервалом между передаточными числами, основная коробка передач и демультипликатор.
Кроме того, изобретение относится к компьютерному программному продукту и запоминающей среде для использования в компьютере с целью переключения передач согласно изобретению.
Краткое описание чертежей
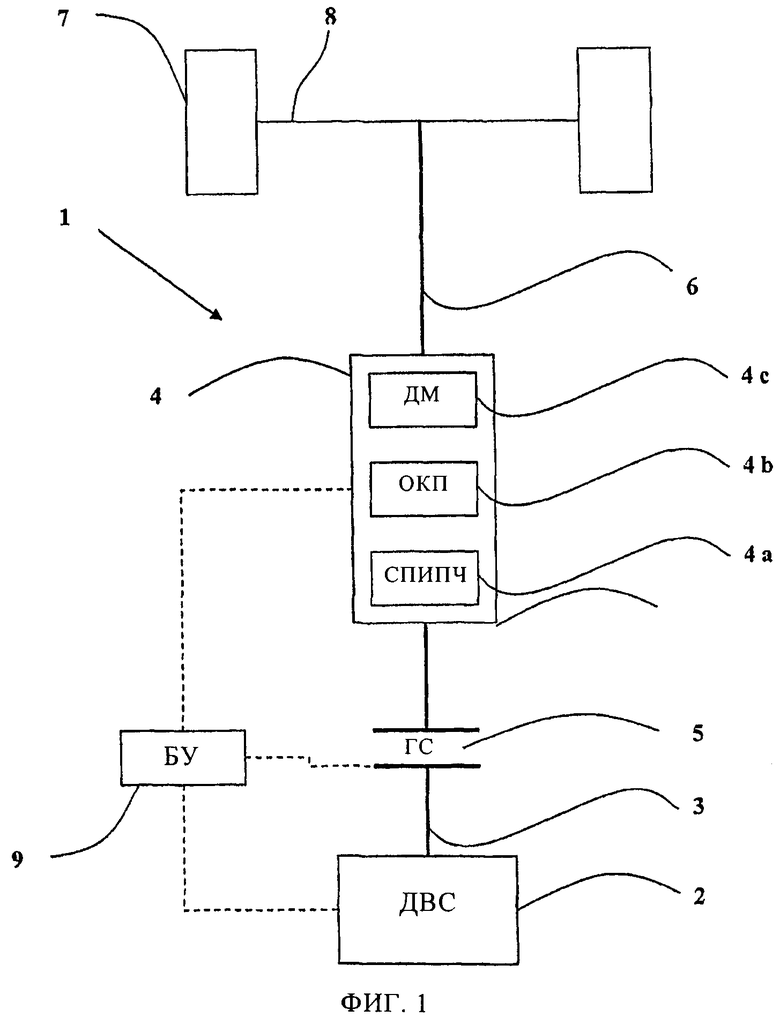
На фиг.1 показана система силового привода, применимая в настоящем изобретении,
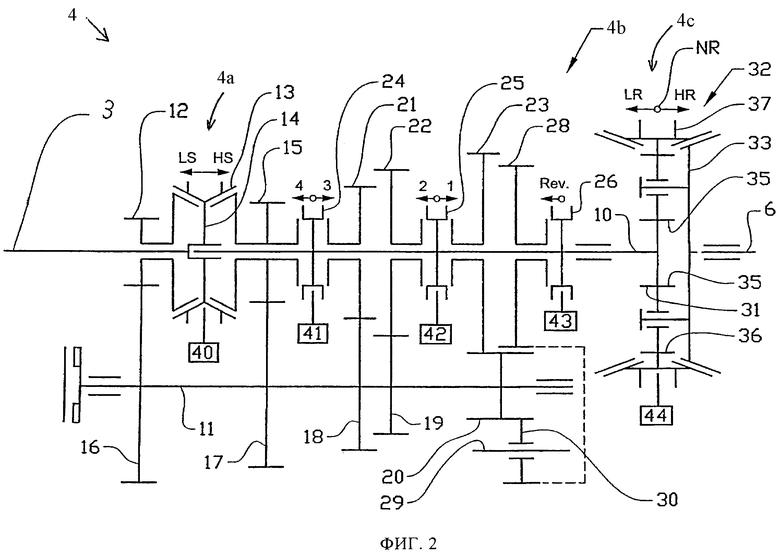
на фиг.2 - коробка передач, применимая в настоящем изобретении,
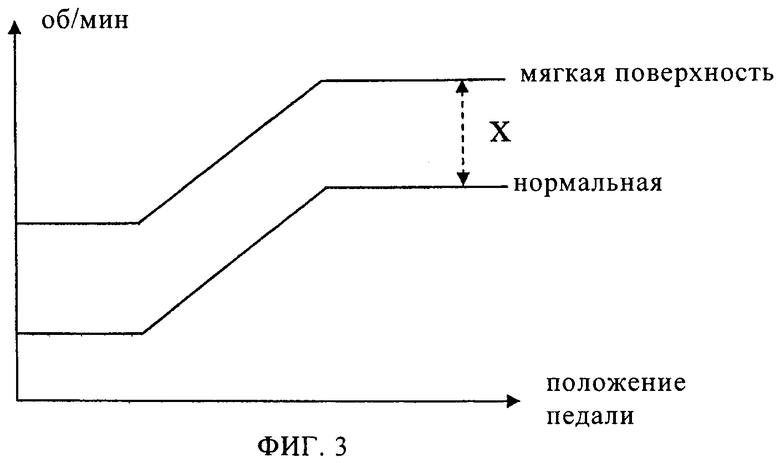
на фиг.3 - диаграмма, иллюстрирующая один из примеров ограничений перехода на повышающую передачу в первом режиме нормального переключения передач и во втором режиме переключения передач при езде по мягкой поверхности в соответствии с настоящим изобретением,
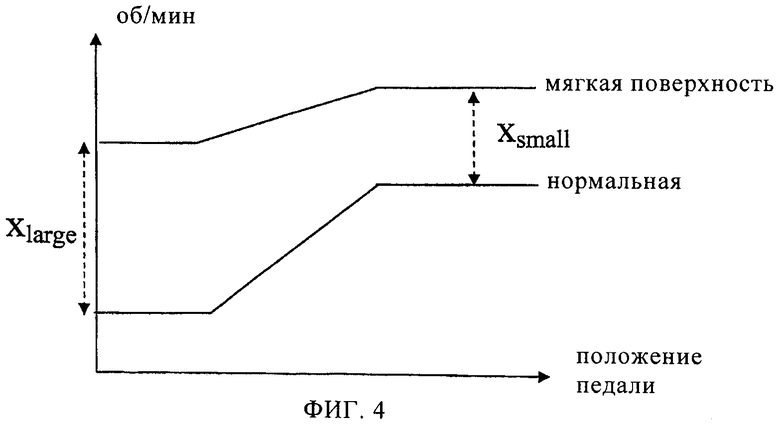
на фиг.4 - диаграмма, иллюстрирующая другой пример ограничений перехода на повышающую передачу в первом режиме нормального переключения передач и во втором режиме переключения передач при езде по мягкой поверхности в соответствии с настоящим изобретением,
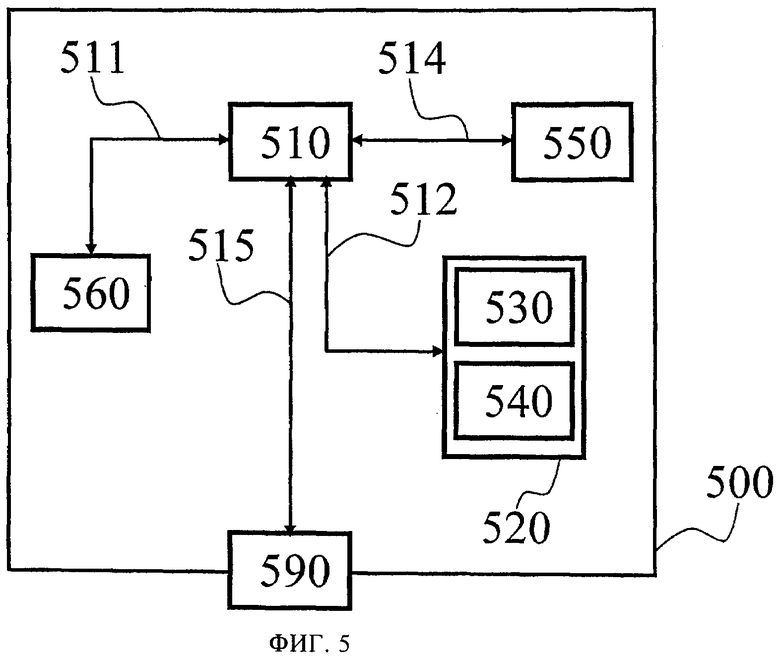
на фиг.5 - схематический вид компьютерной системы управления, применимой в настоящем изобретении.
Осуществления изобретения
На фиг.1 показан автомобиль, оснащенный системой 1 силового привода согласно изобретению. В систему входит двигатель 2 внутреннего сгорания (ДВС), имеющий выходной вал 3, соединенный с механической трансмиссией (МТ) 4 посредством главного сцепления (ГС) 5. Механическая трансмиссия 4 содержит систему 4а передач с интервалом между передаточными числами (СПИПЧ), основную коробку 4b передач (ОКП) и демультипликатор 4с (ДМ). МТ 4 дополнительно имеет выходной вал 6, который посредством ведомого вала 8 соединен с ведущими колесами 7 автомобиля. Системой управляет электронный блок 9 управления (БУ), который соединен с ДВС 2, ГС 5 и МТ 4.
В соответствии с изобретением БУ 9 запрограммирован на выполнение конкретной стратегии переключения передач в зависимости от входных сигналов, которые могут представлять собой вводимый вручную сигнал, указывающий, какую стратегию желает выбрать водитель, или стратегию переключения передач, выбираемую на основании данных датчиков, которые используются для выбора схемы переключения передач из справочной таблицы или указывают определенный алгоритм для применения. Система способна обеспечивать по меньшей мере две различные стратегии управления переключением передач, соответствующие нормальному режиму и режиму езды по мягкой поверхности. БУ 9 может быть запрограммирован на регистрацию преобладающего сопротивления движению и пробуксовки колес. Если сопротивление движению превышает заданную величину, и если пробуксовка колеса превышает заданную величину, БУ может быть запрограммирован на управление согласно режиму езды по мягкой поверхности.
В случае выбора режима езды по мягкой поверхности ручным способом или путем вычислений с использованием соответствующих параметров используется схема переключения передач, приспособленная для обеспечения желаемой мощности при езде по мягкой поверхности, образованной слабо связанными частицами или подобным материалом. Это может иметь место, например, при езде по песчаной дороге в пустыне. Таким образом, схема переключения передач приспособлена переходить на повышающую передачу при более высокой частоте вращения двигателя, чем обычно используется при переключении передач в нормальном режиме, или повышать передачу с меньшим шагом. Разумеется, что в способе может использоваться сочетание этих мер. Целью этой стратегии переключения передач является обеспечение дополнительной мощности до переключения с тем, чтобы после переключения передач движущая сила была достаточной даже при езде по рыхлой поверхности. Обеспечение возможности езды по такой рыхлой поверхности в особенности касается автомобилей для тяжелых условий эксплуатации, колеса которых из-за большого веса автомобилей могут легко погружаться в мягкую поверхность, в результате чего значительно увеличивается сопротивление движению.
На фиг.2 показана механическая трансмиссия (МТ) 4, применимая в настоящем изобретении, которая используется, например, в грузовиках. На входном валу 3, т.е. на выходном валу 7 со стороны ДВС 2 на фиг.1, с возможностью вращения установлено зубчатое колесо 12, которое может быть зафиксировано на валу с помощью захватной втулки 13, снабженной средством синхронизации и без возможности вращения, но с возможностью перемещения в осевом направлении установленной на ступице 14, без возможности вращения соединенной с входным валом 3. Зубчатое колесо 15, с возможностью вращения установленное на главном валу 10, также может фиксироваться относительно входного вала 3 с помощью захватной втулки 13. Зубчатые колеса 12 и 15 входят в зацепление с зубчатыми колесами 16 и 17, соответственно, которые без возможности вращения соединены с промежуточным валом 11. На промежуточном валу 11 без возможности вращения установлены дополнительные зубчатые колеса 18, 19 и 20, которые входят в зацепление с зубчатыми колесами 21, 22 и 23, соответственно, с возможностью вращения установленными на главном валу 10 и фиксируемыми на главном валу с помощью захватных втулок 24 и 25, соответственно, которые в проиллюстрированном варианте осуществления не имеют средств синхронизации. Тем не менее, эти втулки при желании также могут быть снабжены средством синхронизации. На главном валу 10 с возможностью вращения установлено дополнительное зубчатое колесо 28, которое входит в зацепление с промежуточным зубчатым колесом 30, которое с возможностью вращения установлено на отдельном валу 29 и в свою очередь входит в зацепление с зубчатым колесом 20 промежуточного вала. Зубчатое колесо 28 может фиксироваться на своем валу с помощью захватной втулки 26.
Пары зубчатых колес 12, 16 и 15, 17, а также захватная втулка 13 образуют систему 4а передач с интервалом между передаточными числами, имеющую низшую ступень LS и высшую ступень HS. Пара зубчатых колес 15, 17 вместе с парами зубчатых колее 21, 18, 22, 19, 23, 20 и 28, 30 также образует основную коробку 4b передач с четырьмя передачами переднего хода и одной передачей заднего хода. На выходном конце главного вала без возможности вращения установлено зубчатое колесо 31, которое образует центральную шестерню двухступенчатого демультипликатора 4с планетарного типа, обозначенного позицией 32, водило 33 планетарной передачи которого без возможности вращения соединено с валом 34, образующим выходной вал коробки передач. Планетарные шестерни 35 демультипликатора 32 входят в зацепление с кольцевым зубчатым колесом 36, которое может с помощью захватной втулки 37 фиксироваться относительно кожуха коробки передач для обеспечения диапазона низших передач LR и относительно водила 33 планетарной передачи для обеспечения диапазона высших передач HR. Захватная втулка также имеет нейтральное положение NR между положениями LR и HR. В нейтральном положении NR выходной вал 34 отсоединен от главного вала 10.
Захватные втулки 13, 24, 25, 26 и 37 способны перемещаться, как показано стрелками на фиг.2, обеспечивая ступени, показанные рядом со стрелками. Перемещение осуществляется сервомеханизмами 40, 41, 42, 43 и 44, которые схематически представлены на фиг.2 и могут представлять собой цилиндро-поршневые механизмы с пневматическим приводом того типа, которые используются в коробке передач описанного выше типа. Сервомеханизмами управляет содержащий микрокомпьютер электронный блок 9 управления (фиг.1) в зависимости от поступающих в блок управления сигналов, отображающих различные данные двигателя и транспортного средства, такие как, например, частоту вращения двигателя, скорость транспортного средства, положение педали газа, включение/выключение тормоза двигателя, и указывающих, желательно ли ручное переключение или переключение с автоматическим управлением. Блок 9 управления также может регулировать впрыскивание топлива, иными словами, частоту вращения двигателя в зависимости от положения педали газа и от того, включено ли или выключено сцепление 5 (фиг.1).
Проиллюстрированная на фиг.2 механическая трансмиссия 4 служит лишь одним из примеров системы передач, применимой в настоящем изобретении, а изобретательский замысел конкретной стратегии переключения передач применим к любой системе переключения передач. Проиллюстрированная на фиг.2 система может быть модифицирована, например, в том, что касается числа и расположения синхронизаторов, в результате чего синхронное зубчатое колесо, используемое для синхронизации в настоящем изобретении, может быть расположено в основной коробке передач или в системе передач с интервалом между передаточными числами или в демультипликаторе.
На фиг.3 показана диаграмма, на которой по оси x отложено положение педали акселератора, а по оси y - частота вращения двигателя. Двумя кривыми обозначены частоты вращения двигателя при переходе на более высокую передачу в нормальном режиме переключения и в режиме переключения при езде по мягкой поверхности с той же передачи. Как показано, переход на более высокую передачу в режиме переключения при езде по мягкой поверхности осуществляется при более высокой частоте вращения двигателя. В этом варианте осуществления разность х между частотами вращения в двух различных режимах перехода на более высокую передачу с определенной передачи является одинаковой при всех положения педали акселератора.
На фиг.4 показана другая диаграмма, на которой по оси x отложено положение педали акселератора, а по оси y - частота вращения двигателя согласно другому варианту осуществления изобретения. Эта диаграмма соответствует диаграмме, проиллюстрированной на фиг.3, за исключением того, что в этом варианте осуществления разность x между частотами вращения при переходе на более высокую передачу с определенной передачи в нормальном режиме переключения и в режиме переключения при езде по мягкой поверхности различается при различных положениях педали акселератора. При слабом нажатии на педаль акселератора разность между частотами вращения является большей (xlarge), чем при более сильном нажатии на педаль акселератора (Xsmall). Преимуществом этого является возможность не допускать при повышении передачи, чтобы частота вращения двигателя была слишком низкой после повышения передачи. Это также позволяет водителю варьировать скорость движения автомобиля в более широком интервале без переключения передач. Это может быть выгодным в случае разгона автомобиля перед преодолением подъема в случае или необходимости замедления скорости движения перед поворотом.
В настоящем изобретении также предложена компьютерная программа, компьютерный программный продукт и запоминающая среда для использования в компьютере с целью выполнения описанного способа, при этом на фиг.5 проиллюстрирована реализация изобретения с применением компьютера.
На фиг.5 показано устройство 300 управления согласно одному из вариантов осуществления изобретения, содержащее энергонезависимую память 320, процессор 310 и память 360 с оперативной записью и считыванием. Память 320 имеет первую область 330, в которой хранится компьютерная программа для управления устройством 300. Компьютерной программой для управления устройством 300, хранящейся в области 330 памяти, может являться операционная система.
Устройство 300 может помещаться, например, в блоке управления, таком как блок 9 управления. Блоком 310 обработки данных может являться, например, микрокомпьютер.
Память 320 также имеет вторую область 340, в которой хранится программа управления системой силового привода согласно изобретению. В одном из альтернативных вариантов осуществления программа управления системой силового привода хранится в отдельной энергонезависимой запоминающей среде (средстве) 350, такой как, например, компакт-диск или полупроводниковая память со сменными дисками. Программа может храниться в выполнимой форме или в сжатом виде.
Когда далее указано, что блок 310 обработки данных выполняет конкретную функцию, должно быть ясно, что блок 310 обработки данных выполняет конкретную часть программы, хранящейся в памяти 340, или конкретную часть программы, хранящейся в энергонезависимой среде 350 для записи.
Блок 310 обработки данных рассчитан на обмен данными с памятью 350 посредством шины 314 данных. Блок 310 обработки данных также рассчитан на обмен данными с памятью 320 посредством шины 312 данных. Кроме того, блок 310 обработки данных рассчитан на обмен данными с памятью 360 посредством шины 311 данных. Блок 310 обработки данных также рассчитан на обмен данными с портом 390 данных путем использования шины 315 данных.
Предложенный в настоящем изобретении способ может быть осуществлен блоком 310 обработки данных, который выполняет программу, хранящуюся в памяти 340, или программу, хранящуюся в энергонезависимой среде 350 для записи.
Изобретение не следует считать ограниченным описанными выше вариантами осуществления, и предполагается ряд дополнительных вариантов и усовершенствований, входящих в объем следующей далее формулы изобретения. Соответственно, описанная логическая система является лишь одним из примеров возможной реализации системы управления силовым приводом в транспортном средстве, и для специалистов в данной области техники ясно, что существует ряд других возможностей реализации изобретения в транспортном средстве, не выходящих за пределы изобретательского замысла настоящей заявки.
Группа изобретений относится к способу и системе управления силовой передачей транспортного средства. Система содержит автоматическое главное сцепление, ступенчатую коробку передач, блок управления главным сцеплением и ступенчатой коробкой передач. Блок управления запрограммирован на генерацию управляющего сигнала, отображающего выбор желаемой передачи. Блок управления содержит два различных набора алгоритмов управления выбором передач. Алгоритмы управления включают первый алгоритм управления для использования в нормальном режиме и второй алгоритм управления для использования в режиме езды по мягкой поверхности. Способ заключается в том, что определяют состояние дороги посредством фиксации преобладающего сопротивления движению и пробуксовки колес. Если состояние дороги соответствует нормальным дорожным условиям, применяют первый алгоритм управления. Если состояние дороги соответствует дорожным условиям езды по мягкой поверхности, применяют второй алгоритм управления выбором передач. Транспортное средство включает заявленную систему управления силовой передачей. Устройство управления силовой передачей транспортного средства снабжено памятью, которая содержит машиночитаемую программу. При исполнении машиночитаемой программы осуществляются действия заявленного способа. Технический результат заключается в повышении эффективности систем управления силовой передачей транспортного средства. 4 н. и 14 з.п. ф-лы, 5 ил.
1. Система силовой передачи транспортного средства, в которую входит автоматическое главное сцепление (5), ступенчатая коробка (4) передач и блок (9) управления, выполненный с возможностью управления главным сцеплением и ступенчатой коробкой передач, при этом блок управления запрограммирован на генерацию управляющего сигнала, отображающего выбор желаемой передачи, и содержит по меньшей мере два различных набора алгоритмов управления выбором передач для генерации управляющего сигнала выбора передач, где алгоритмы управления содержат пределы частоты вращения двигателя для определения момента повышения или понижения передачи и определения передачи для выбора и включения, и различные алгоритмы управления запрограммированы на генерацию различных управляющих сигналов выбора передач на основании входных данных, причем блок управления соединен с переключателем алгоритма управления выбором передач, указывающим, какой набор алгоритмов управления выбором передач следует использовать блоку управления, и упомянутые различные алгоритмы управления выбором передач включают по меньшей мере первый алгоритм управления выбором передач, предназначенный для использования в нормальном режиме, соответствующем условиям обычной дороги, отличающаяся тем, что упомянутые алгоритмы управления выбором передач включают второй алгоритм управления выбором передач, предназначенный для использования в режиме езды по мягкой поверхности, при этом блок управления запрограммирован на регистрацию преобладающего сопротивления движению и пробуксовки колес, и, если сопротивление движению превышает заданную величину, а пробуксовка колеса превышает другую заданную величину, блок управления запрограммирован на управление в режиме езды по мягкой поверхности.
2. Система по п.1, отличающаяся тем, что второй алгоритм управления выбором передач запрограммирован на осуществление переключения на выбранную более высокую передачу при более высокой частоте вращения двигателя, чем при использовании алгоритма управления выбором передач в нормальном режиме.
3. Система по п.1, отличающаяся тем, что при повышении передач второй алгоритм управления выбором передач запрограммирован на осуществление переключения передач с меньшим шагом, чем при использовании нормальной стратегии переключения передач.
4. Система по п.1, отличающаяся тем, что второй алгоритм управления выбором передач зависит от угла поворота рулевого колеса таким образом, что при увеличенном угле поворота рулевого колеса повышается предел частоты вращения двигателя для переключения передачи.
5. Система по п.4, отличающаяся тем, что, если угол поворота рулевого колеса превышает заданный предел, повышение передачи запрещено.
6. Система по п.1, отличающаяся тем, что на основании данных, поступающих от соответствующих датчиков, возможно выполнение оценки или вычисления величины сопротивления движению, так что система управления транспортного средства способна прогнозировать, что, когда сопротивление движению в течение определенного времени будет превышать определенный уровень, силовая передача будет управляться согласно второму алгоритму управления выбором передач, т.е. в режиме езды по мягкой поверхности, а в противном случае она будет управляться согласно другому алгоритму управления выбором передач, в частности, в нормальном режиме.
7. Система по п.1, отличающаяся тем, что блок управления содержит справочную таблицу или математическую формулу.
8. Система по п.1, отличающаяся тем, что при управлении силовой передачей согласно второму алгоритму управления выбором передач нарастание крутящего момента является более быстрым, чем при управлении согласно первому алгоритму управления выбором передач.
9. Система по любому из предыдущих пунктов, отличающаяся тем, что силовая передача содержит коробку передач с интервалом между передаточными числами, основную коробку передач и демультипликатор.
10. Транспортное средство, содержащее систему силовой передачи по любому из пп.1-9.
11. Транспортное средство по п.10, отличающееся тем, что оно представляет собой автомобиль для сложных условий эксплуатации.
12. Способ управления силовой передачей транспортного средства, имеющей алгоритмы управления для генерации управляющего сигнала выбора передачи, содержащие пределы частоты вращения двигателя для определения момента повышения или понижения передачи и определения передачи для выбора и включения, отличающийся тем, что он включает определение состояния дороги посредством фиксации преобладающего сопротивления движению и пробуксовки колес, если установленное состояние дороги соответствует нормальным дорожным условиям, применение первого алгоритма управления выбором передач, предназначенного для нормального режима езды, соответствующего условиям на обычной дороге, если установленное состояние дороги соответствует дорожным условиям езды по мягкой поверхности, когда сопротивление движению превышает заданную величину, а пробуксовка колес превышает другую заданную величину, применение второго алгоритма управления выбором передач, предназначенного для режима езды по мягкой поверхности, соответствующего условиям на дороге с мягкой поверхностью.
13. Способ по п.12, отличающийся тем, что второй алгоритм управления выбором передач запрограммирован на осуществление переключения на выбранную более высокую передачу при более высокой частоте вращения двигателя, чем при использовании первого алгоритма управления выбором передач.
14. Способ по п.12, отличающийся тем, что при повышении передач второй алгоритм управления выбором передач запрограммирован на осуществление переключения передач с меньшим шагом, чем при использовании нормальной стратегии переключения передач.
15. Способ по п.12, отличающийся тем, что второй алгоритм управления выбором передач зависит от угла поворота рулевого колеса таким образом, что при увеличенном угле поворота рулевого колеса повышается предел частоты вращения двигателя для переключения передачи.
16. Способ по п.15, отличающийся тем, что, если угол поворота рулевого колеса превышает заданный предел, повышение передачи запрещено.
17. Способ по п.12, отличающийся тем, что при управлении силовой передачей согласно второму алгоритму управления выбором передач нарастание крутящего момента является более быстрым, чем при управлении согласно первому алгоритму управления выбором передач.
18. Устройство (500) управления, обеспечивающее управление силовой передачей транспортного средства и снабженное памятью (520), содержащей машиночитаемую программу, при исполнении которой осуществляются действия способа по п.12.
| US 5390116 A, 14.02.1995 | |||
| US 4569255 A, 11.02.1986 | |||
| DE 19623816 A1, 19.12.1996 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИДРООБЪЕМНОЙ ТРАНСМИССИЕЙ КОЛЕСНОЙ МАШИНЫ | 2004 |
|
RU2264571C1 |

