Изобретение относится к способу для регулирования температуры пара для паросиловой установки, при котором регулятор состояния несколько состояний пара в перегревателе для перегрева пара с помощью наблюдателя, который рассчитывает эти состояния, для выдачи заданной температуры пара подает по обратной связи в качестве регулирующего воздействия, и заданная температура пара передается на другой регулятор для регулирования температуры.
КПД паросиловой установки возрастает с температурой пара, вырабатываемого в котле силовой установки. В общем случае допустимые границы максимальной температуры материала котельной трубы, а также турбины, которая нагружается паром, не должны превышаться. Чем точнее температура может поддерживаться на ее заданном значении, тем ближе заданное значение может лежать к допустимой температурной границе, то есть, тем более высокий КПД может достигаться при работе паросиловой установки.
Перегрев пара в котле осуществляется тем, что пар в нескольких ступенях направляется через обогреваемый пучок (секцию) труб, так называемые ступени перегревателя. Регулирование температуры пара осуществляется путем впрыска воды в паропровод перед ступенями перегревателя через соответствующий клапан впрыска. Перегреватели с их большой стальной массой демонстрируют весьма инерционное поведение. Регулирование клапана впрыска оказывает свое действие на регулируемую температуру только спустя несколько минут. При этом временное запаздывание не является постоянным, а зависит от текущего расхода пара. Дополнительно, на регулируемую температуру сильно влияют многочисленные помехи, такие как изменения нагрузки, обдувка для удаления сажи в котле, смена топлива и т.д. По этим причинам точное регулирование температуры трудно достижимо.
Для решения этой проблемы известно так называемое каскадное регулирование, при котором создаются два вложенные друг в друга PI-контура регулирования. Внешний, более медленный PI-регулятор, регулирует температуру на выходе перегревателя и выдает заданное значение для температуры на входе перегревателя - то есть после впрыска. Температура на входе перегревателя регулируется внутренним, быстрым PI-регулятором, который регулирует клапан впрыска. Тем самым помехи температуре пара на входе впрыска могут быстро отрабатываться. Недостаток этого принципа состоит в том, что помехи, которые действуют на сам перегреватель, могут отрабатываться только во внешнем, медленном контуре, то есть с низким качеством регулирования.
Задачей изобретения является создание способа, с помощью которого можно регулировать температуру пара точным и стабильным образом.
Эта задача решается тем, что регулятор состояния в соответствии с изобретением представляет собой линейно-квадратичный регулятор. В случае одного такого линейного квадратичного регулятора (LQR) или, иными словами, линейно-квадратичной оптимальной обратной связи по состоянию, речь идет о регуляторе состояния, параметры которого могут определяться таким образом, что критерий качества для качества регулирования оптимизируется. Тем самым достигается как точное, так и стабильное регулирование. При этом изобретение исходит из того соображения, что при регулировании состояния несколько частично невозможных для измерения состояний подаются по обратной связи для определения сигналов перестановки регулятора. Для рассматриваемого случая применения это означает, что в алгоритме также применяются температуры в нескольких местах вдоль перегревателя. Так как эти температуры, однако, не могут быть измерены, необходима схема наблюдателя, с помощью которой могут оцениваться или вычисляться необходимые значения температуры. Понятия «оценивать», «вычислять» и «определять» в последующем применяются в качестве синонимов. Преимущество этого принципа состоит в том, что очень быстро и точно можно реагировать на помехи, которые воздействуют на перегреватель.
Паросиловая установка представляет собой установку, которая приводится в действие силой пара. Она может быть паровой турбиной, установкой парового цикла или любой другой установкой, которая приводится в действие энергией пара.
В качестве регулятора состояния в последующем понимается контур регулирования, который регулирует регулируемые параметры на основе представления пространства состояний. При этом состояние участка регулирования посредством наблюдателя вводится на участок регулирования, то есть подается по обратной связи. Обратная связь, которая вместе с участком регулирования образует контур регулирования, реализуется наблюдателем, который заменяет устройство измерения, и собственно регулятором состояния. Наблюдатель рассчитывает состояния системы, в данном случае пара перегревателя. Наблюдатель включает в себя дифференциальное уравнение состояния, выходное уравнение и вектор наблюдателя. Выход наблюдателя сравнивается с выходом участка регулирования. Разность воздействует через вектор наблюдателя на дифференциальное уравнение состояния.
В предпочтительной форме выполнения изобретения наблюдатель является калмановским фильтром, который рассчитан на линейно-квадратичную обратную связь по состоянию. Совокупность LQR с калмановским фильтром обозначается как LQG (линейно-квадратичный гауссовский) алгоритм.
Предпочтительным образом помеховая величина тепла, вводимого посредством перегревателя в пар, определяется как состояние и применяется в алгоритме регулирования. При этом не только температуры или производные из них параметры вдоль перегревателя, но и дополнительно помеховые величины могут определяться в качестве состояния и, в особенности, с помощью наблюдателя оцениваться или определяться. Помехи, которые воздействуют непосредственно на перегреватель, проявляются в том, что интервал нагрева в перегревателе изменяется. Посредством такого наблюдения помеховых величин становится возможной очень быстрая, точная и одновременно устойчивая реакция на соответствующие помехи.
Другое предпочтительное выполнение изобретения предусматривает, что в качестве параметров состояния применяются энтальпии пара. За счет применения энтальпий вместо температур пара система регулирования может линеаризоваться и тем самым становиться доступной более простому расчету. LQR-способ относится к линейной задаче регулирования. Но температура на входе в перегреватель действует, посредством восприятия тепла, нелинейным образом на параметр регулирования - температуру на выходе. За счет непрерывного пересчета, в особенности всех измеренных и заданных значений температуры, в энтальпии реализуется линеаризация задачи регулирования, так как между входной энтальпией и выходной энтальпией существует линейная взаимосвязь. При этом пересчет целесообразно осуществляется с помощью соответствующих табличных соотношений между водой и паром с применением измеренного давления пара. За счет этой линеаризации достигается очень надежный режим регулирования, то есть качество регулирования более не зависит от текущей рабочей точки установки.
Кроме того, предложено, что обратная связь по состоянию осуществляется через матричное уравнение, параметр которого определяется по меньшей мере частично с применением текущих измеренных значений. За счет оперативного вычисления матрицы обратной связи можно регулятор постоянно согласовывать с фактическими условиями функционирования. Например, за счет этого автоматически принимается во внимание зависимое от нагрузки изменение динамического режима перегревателя. Также за счет этого этапа может достигаться повышение устойчивости алгоритма регулирования. Ввиду того факта, что алгоритм регулирования является весьма устойчивым, при пуске в эксплуатацию нужно устанавливать лишь очень малое число параметров. Время пуска и затраты на пуск в эксплуатацию значительно сокращаются по сравнению со всеми известными до сих пор способами.
Предпочтительным образом матричное уравнение вычисляется с помощью техники (метода) управления паросиловой установки. При этом метод управления может представлять систему управления, которая управляет паросиловой установкой в ее регулярном режиме работы. Чтобы математические компоненты метода управления поддерживать простыми, является предпочтительным, если матричное уравнение переводится в систему скалярных дифференциальных уравнений. Относительно простое интегрирование матричного уравнения может быть реализовано посредством интегрирования назад по времени. Так как в реальном случае в распоряжении не имеется никакой информации из будущего, можно реализовать интегрирование, эквивалентное обратному интегрированию, если система скалярных дифференциальных уравнений интегрируется с обратным знаком, что устойчиво ведет к тому же стационарному решению.
Изобретение касается, кроме того, устройства для регулирования температуры пара для паросиловой установки с регулятором состояния для выдачи заданной температуры пара в качестве регулирующего воздействия посредством подачи по обратной связи нескольких состояний пара перегревателя для перегрева пара, с наблюдателем, который вычисляет эти состояния, и с другим регулятором для регулирования температуры на основе заданной температуры пара.
Предложено, что регулятор состояния является линейно-квадратичным регулятором. Может достигаться точное и стабильное регулирование.
Предпочтительным образом устройство выполнено таким образом, чтобы осуществлять один или несколько, или все описанные выше этапы способа.
Изобретение далее поясняется более подробно на примерах выполнения, представленных на чертежах, на которых показано следующее:
Фиг.1 - фрагмент паротурбинной электростанции с перегревателем,
Фиг.2 - схема каскада регулирования,
Фиг.3 - модель перегревателя,
Фиг.4 - линейная модель участка в качестве основы для проекта регулятора,
Фиг.5 - структура наблюдателя,
Фиг.6 - общий вид структуры регулятора.
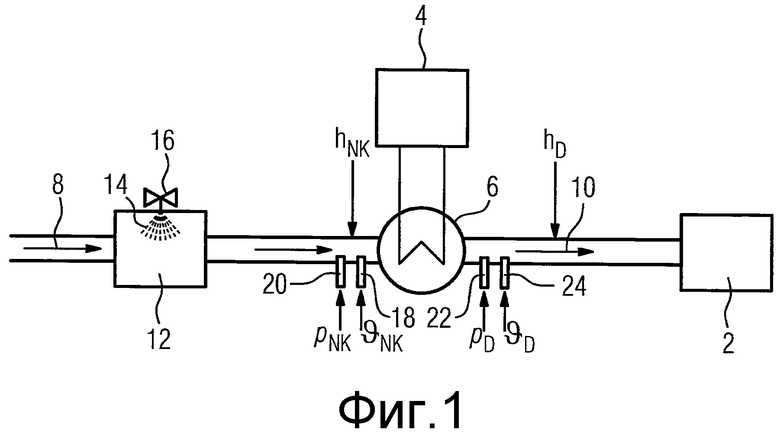
На фиг.1 показано схематичное представление фрагмента паротурбинной электростанции с паровой турбиной в качестве паросиловой установки 2, котлом 4, который выдает тепло на ступень перегревателя, например многоступенчатого перегревателя 6, который обтекается паром 8. За счет приема тепла пар 8 в перегревателе 6 перегревается до состояния свежего (острого) пара 10 и затем подается на паровую турбину. Для регулирования температуры пара 8 предусмотрен впрыскивающий охладитель 12, который впрыскивает воду 14 в пар 8 и его охлаждает таким образом. Количество впрыскиваемой воды 14 устанавливается регулирующим клапаном 16. Датчик 18 температуры и датчик 20 давления измеряют температуру ϑNK или давление pNK пара 8 перед перегревателем 6, и датчик 22 температуры и датчик 22 давления измеряют температуру ϑD свежего пара или давление pD свежего пара для свежего пара 10 после перегревателя 6.
Только для лучшего различения в последующем изложении пар 8 пред перегревателем 6 обозначается как пар 8, а пар 10 после перегревателя - как свежий пар 10, причем следует подчеркнуть, что изобретение в описываемой далее форме выполнения, разумеется, также применимо к пару, который, при обстоятельствах, не обозначался бы как свежий пар.
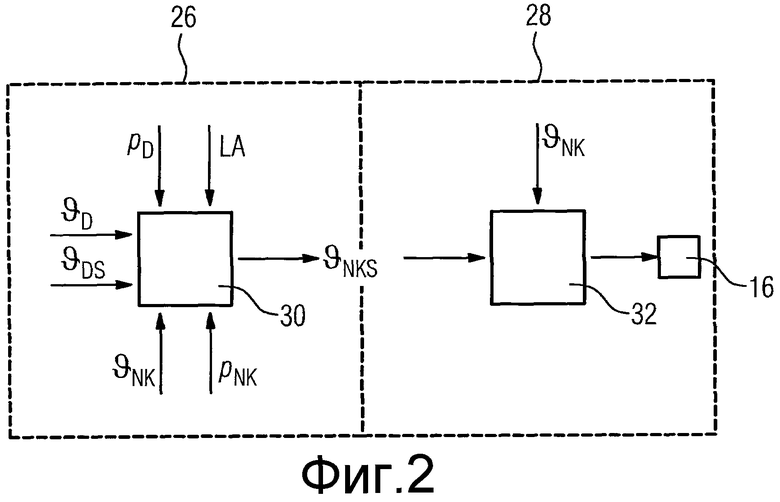
На фиг.2 схематично представлен каскад регулирования с внешним каскадом 26 и внутренним каскадом 28. Внешний каскад 26 включает в себя LQG-регулятор 30, на который в качестве входных параметров подаются температура ϑD свежего пара, а также ее заданное значение ϑDS, давление pD свежего пара и температура ϑNK или давление pNK пара 8. Дополнительным входом является текущий сигнал нагрузки LA, который необходим для зависимого от нагрузки согласования постоянных времени перегревателя. Температура ϑD свежего пара после перегревателя 6 является параметром регулирования LQG-регулятора 30. Заданная температура ϑNKS выдается в качестве управляющего воздействия от LQG-регулятора 30.
Заданная температура ϑNKS пара 8 задается для контура 32 регулирования внутреннего каскада 28 в качестве заданного значения. Температура ϑNK пара 8 после впрыскивающего охладителя 12 является параметром регулирования контура 32 регулирования. Контур 32 регулирования имеет установку регулирующего клапана 16 впрыскивающего охладителя 12 в качестве управляющего воздействия и регулирует с помощью впрыскиваемой в пар 8 массы 14 воды температуру ϑNK.
LQG-регулятор 30 не непосредственно действует через исполнительный элемент на процесс, а передает заданное значение ϑNKS для температуры после впрыскивающего охладителя 12 на соответствующий контур 32 регулирования, с которым он тем самым образует каскад из внешнего каскада 26 и внутреннего каскада 28. Измеренная температура ϑNK после впрыскивающего охладителя 12 требуется LQG-регулятору 30 как дополнительная информация, как и давление pNK пара после впрыскивающего охладителя 12 и давление pD свежего пара, так как из температур и давлений вычисляются внутренние энтальпии. Ограничение насыщенного пара заданного значения температуры ϑNKS после охладителя 12 осуществляется вне компонента LQG-регулятора 30.
Для параметризации LQG-регулятора 30 требуется постоянная времени T100, которая описывает поведение перегревателя при полной нагрузке. Изменение температуры ϑNK пара на входе перегревателя воздействует при этом примерно подобным образом на температуру ϑD свежего пара, как это описывает задержка посредством трех PT1-звеньев с соответствующей постоянной времени T100. Кроме того, требуется постоянная времени Tmess, которая описывает поведение во времени измерения температуры свежего пара.
Поведение регулятора параметризируется по двум устанавливаемым значениям R и RK, которые описывают чувствительность регулятора состояния и калмановского фильтра.
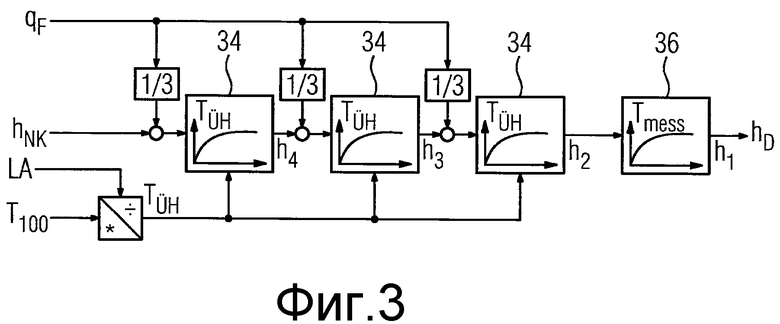
Фиг.3 показывает модель участка перегревателя в перегревателе 6, который состоит из трех РТ1-звеньев 34. Под РТ1-звеном далее понимается линейное передаточное звено, которое имеет временное запаздывание первого порядка. Три РТ1-звена 34 отражают переходную характеристику запаздывания от удельной энтальпии hNK на входе перегревателя 6, таким образом, после охладителя 12, на удельную энтальпию hD свежего пара 10. При этом вычисление производится с энтальпиями вместо температур, так как тем самым обосновывается допущение линейного поведения. В качестве постоянной времени TÜH для РТ1-звеньев 34 служит частное Т100 и сигнала нагрузки LA, благодаря чему аппроксимируется зависимое от нагрузки поведение во времени перегревателя. При незначительной нагрузке уменьшается скорость течения пара 8 через перегреватель, и передаточная характеристика становится соответственно более инерционной.
Подача qF тепла из котла 4 приводит к повышению энтальпии на стороне пара через перегреватель 6. В модели это осуществляется путем суммирования каждой трети удельной подачи тепла на вход каждого РТ1-звена 34. Запаздывание измерительного звена при измерении температуры свежего пара моделируется дополнительным РТ1-звеном 36 с постоянной времени Tmess. Динамика исполнительного звена в модели, которая положена в основу регулятора состояния, то есть части LQG-регулятора 30, осознанно не присутствует.
Подача qF тепла из котла 4 представляет в рассматриваемой модели мешающую (помеховую) величину, которая не измеряется непосредственно. Поэтому в случае регуляторов известно выполнение динамического расширения участка регулирования. Это дополнение I-компонента позволяет избежать остающихся ошибок регулирования. Так как qF в общем случае не является медленно меняющейся величиной, а составляет большую долю воздействующих на перегреватель 6 флуктуирующих помех, то проистекающие из топки помехи отрабатываются прежде всего через этот I-компонент, а не через собственно регулятор состояния.
В случае LQG-регулятора 30 помеховая величина qF реконструируется введенным наблюдателем и соответственно подключается, так что динамическое расширение модели участка на заключительный I-компонент не требуется.
Регулирующим параметром LQG-регулятора 30 является температура ϑD свежего пара. Однако так как рассматриваемый здесь регулятор состояния базируется на модели с энтальпиями, то температура ϑD свежего пара с помощью давления pD свежего пара и таблицы параметров водяного пара пересчитывается в удельную энтальпию hD свежего пара 10. Для линейного регулятора состояния hD является, таким образом, параметром регулирования.
Рассматриваемый регулятор состояния не должен непосредственно воздействовать на впрыскивающий охладитель-регулирующий клапан 16. Должна сохраняться испытанная каскадная структура, при которой основной контур 32 регулирования, например PI-регулятор посредством регулирующего клапана 16 регулирует температуру ϑNK после впрыскивающего охладителя 12 до заданного значения ϑNKS. Это заданное значение ϑNKS является, таким образом, управляющим воздействием для внешнего каскада, который образован регулятором состояния. Заданное значение ϑNKS при этом вновь формируется с помощью давления и таблицы параметров водяного пара из энтальпии hNKS. Тем самым линейный регулятор состояния имеет управляющее воздействие hNKS.
Регулятор состояния формирует свой регулирующий выход как взвешенную сумму состояний модели участка. В моделируемом здесь случае это выходы четырех РТ1-звеньев 34, 36, обозначенные на фиг.3 как h1-h4.
Однако для регулирования применяются не непосредственно четыре состояния h1-h4, а отклонение состояний от их рабочей точки. Для h1 и h2 эта рабочая точка задается через заданное значение hDS энтальпии, для h3 и h4 оно лежит на 1/3 qF или 2/3 qF ниже. Сумма, взвешенная с помощью коэффициентов от k1 до k4, имеет следующий вид:
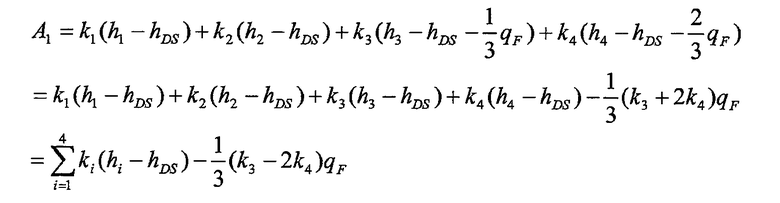
Отклонение каждого состояния от его рабочей точки и, тем самым, взвешенная сумма А1 в рабочей точке становится нулем, то есть не происходит никакого регулирующего вмешательства. Управляющее воздействие hNKS не должно, однако, быть равен нулю, а должно лежать на величину теплопоглощения qF ниже заданного значения энтальпии hDS свежего пара. При этом сдвиге в итоге получается закон регулятора:

Теплопоглощение qF может рассматриваться при этом как помеховая величина, которая включается во взвешенном виде с коэффициентом:

За счет включения помеховой величины k5qF к тому же компенсируется то, что заданные значения для h3 и h4 отличаются от hDS. Выражение hDS-k5qF может восприниматься как управляющая ветвь, и в качестве обратной связи остается:

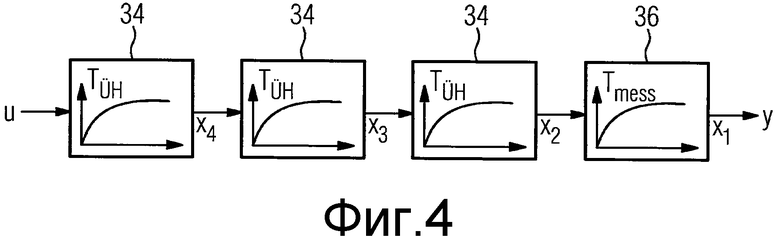
Собственное поведение участка регулирования теперь повергается влиянию обратной связи. Поэтому далее рассматривается модель участка, из которой исключаются управляющая ветвь и помеховая величина. Получается цепочка РТ1-звеньев 34, 36, как представлено на фиг.4.
В матричной записи цепочка РТ1-звеньев 34, 36 может быть представлена с помощью представления пространства состояний в форме:
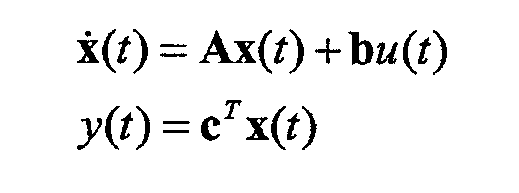
с вектором состояний:
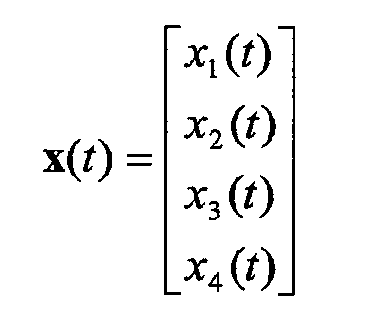
и с системными матрицами:
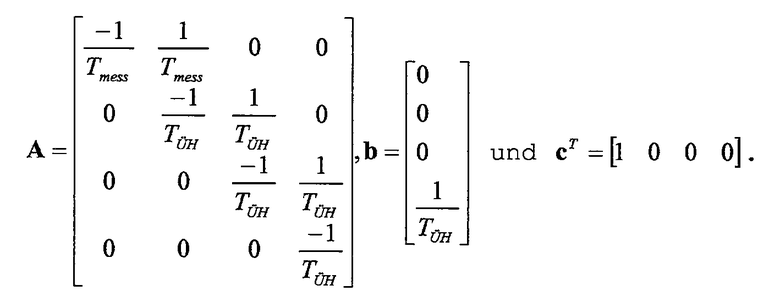
Собственное поведение участка представляется собственными значениями А-матрицы, одинаковыми по значению с полюсами передаточной функции. Получается полюс при -1/Tmess и трехкратный полюс при -1/ТÜН. Так как все полюса имеют отрицательную действительную часть, участок является устойчивым. Так как мнимые части всех полюсов равны нулю, то не существует комплексно-сопряженной пары полюсов, то есть не могут возникать перерегулирования. Скорость нарастания колебаний или затухания, наконец, описывается посредством величин действительных частей полюсов.
Если контур регулирования замыкается посредством обратной связи по состоянию

с усилением регулирования
то получается
Собственное поведение замкнутого контура регулирования представляется посредством собственных значений матрицы (А-bk T). Посредством соответствующего выбора усиления k T регулятора эти собственные значения изменяются и, таким образом, полюса замкнутого контура регулирования и, тем самым, также поведение участка регулирования. Например, сдвиг полюсов «влево», то есть более сильная отрицательная действительная часть, делает участок регулирования более скоростным.
Для выбора усиления k T регулятора необходима приемлемая методика. Проблема LQ-регулирования формулирует компромисс из затрат на регулирование и качества регулирования, отказывается в общем от вынуждения апериодического режима и достигает за счет этого заметно более высокой устойчивости.
Оценка качества регулирования и затрат на регулирование осуществляется посредством функционала затрат:
При этом отклонения состояний взвешиваются матрицей Q, квадратичные затраты на регулирование взвешиваются посредством r и интегрируются по времени. Если рассматривается, например, нерегулируемый устойчивый участок регулирования, такой как участок перегревателя из фиг.4, то начальная помеха состояний затухает со временем полностью. Функционал принимает известное бесконечное значение. Если теперь контур регулирования замыкается и тем самым обуславливает более быстрый режим затухания, то, как правило, вклад состояний в значение функционала становится меньше, и качество регулирования становится лучше. В общем случае, сюда добавляются еще затраты на регулирование для компенсации начальной помехи. При очень агрессивном регуляторе функционал затрат может тем самым принимать даже большее значение, чем при нерегулируемом участке. Минимизация функционала затрат представляет, таким образом, компромисс между качеством регулирования и затратами регулирования.
Так как качество регулирования осуществляется посредством взвешенной квадратичной суммы состояний, можно посредством выбора матрицы Q оказывать влияние на то, что определяется как «хороший режим регулирования». Как правило, только главная диагональ матрицы Q заполнена, чем оцениваются квадраты отдельных состояний, но не произведения двух состояний. Взвешивание затрат на регулирование осуществляется посредством коэффициента r. Чтобы оказать влияние на отношение между качеством регулирования и затратами на регулирование, достаточно изменить r, а Q оставить неизменной. Например, можно было бы удвоение каждого вклада в Q вынести за скобки и эквивалентно выразить путем уменьшения наполовину значения r, что тогда соответствует минимизации 0,5-кратного функционала затрат и приводит к тому же результату.
Проблема минимизации, при которой устанавливается закон регулятора
и отыскивается усиление k T регулятора, для которого функционал стоимости становится минимальным, приводит к матричному дифференциальному уравнению Riccati (MRDGL) для матрицы P(t), как описано во множестве источников:

С помощью стационарного решения Р этого MRDGL получается в итоге усиление k T регулятора в виде:

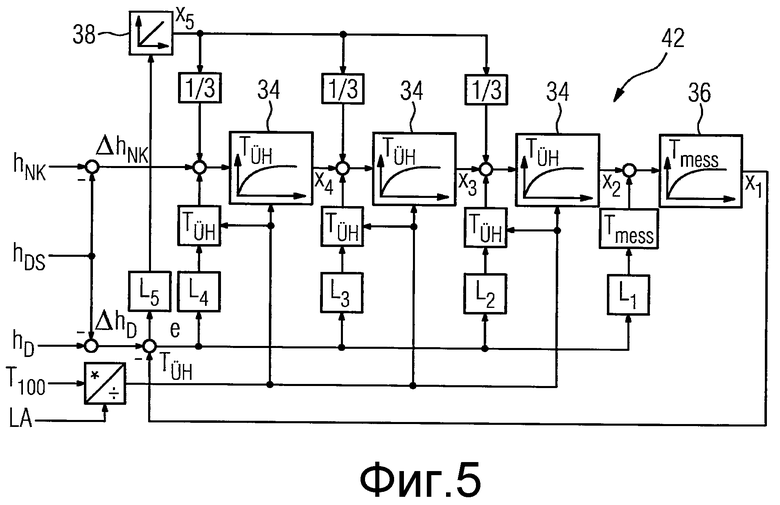
Далее описывается наблюдатель, обозначаемый также как наблюдатель помехи или наблюдатель помеховой величины, так как он наблюдает помеху. Фиг.5 показывает структуру наблюдателя помеховой величины.
Регулятор состояния формирует свой выход как взвешенную сумму состояний участка регулирования. В моделируемом здесь случае это выходы четырех РТ1-звеньев 34, 36. Однако так как не имеется никаких измерений энтальпий вдоль перегревателя 6, они должны реконструироваться с помощью наблюдателя.
Реконструкция состояний участка регулирования осуществляется путем вычисления динамической модели участка параллельно истинному процессу. Отклонение между измеренными параметрами из процесса и соответствующими значениями, которые определяются с помощью модели участка, обозначается как ошибка е наблюдателя. Отдельные состояния модели участка корректируются соответственно посредством взвешенной ошибки наблюдателя, посредством чего она стабилизируется. Взвешивания обозначаются как усиление L1-L5 наблюдателя.
В качестве «измеренного параметра» в этом случае служит удельная энтальпия hD свежего пара, которая вычисляется из температуры ϑD свежего пара и давления pD свежего пара.
В качестве модели участка используется несколько модифицированная по сравнению с фиг.3 модель наблюдателя. В качестве параметров состояния выбираются не абсолютные удельные энтальпии, а их отклонение от заданного значения hDS энтальпии для свежего пара 10, таким образом, как состояния ранее были определены при описании регулятора состояния.
Одним входом в модель участка является удельная энтальпия hNK после охладителя 12. Она образуется непосредственно из измеренного значения температуры ϑNK после охладителя 12 и соответствующего давления p NK.
Вторым входом в модель участка является помеховая величина qF, которая не может быть измерена, а должна реконструироваться. При этом модель наблюдателя в этом месте расширяется на состояние х5. Интегратор 38 подает оцененный тепловой поток в модель участка. Единственной проводкой входа интегратора является взвешенная посредством L5 ошибка наблюдателя для коррекции.
Системные матрицы модели наблюдателя без обратной связи посредством усилений наблюдателя определяются следующим образом:
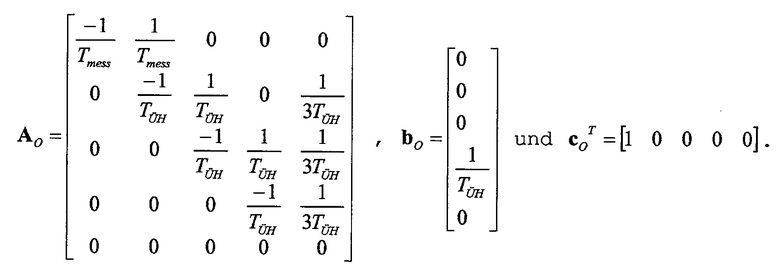
Нижний индекс о при этом соответствует наблюдателю. Бросается в глаза, что состояние х5, которое представляет тепловой поток qF, является неуправляемым, однако является хорошо наблюдаемым.
Представленный здесь наблюдатель помеховой величины требует для реконструкции состояний участка (от х1 до х4) и помеховой величины (х5) только измеренных значений или выведенных из измеренных значений величин - удельную энтальпию hNK перед и hD после перегревателя 6. Не требуются никакие регулирующие сигналы регулятора, так как он не содержит никакой модели динамики исполнительного звена. Тем самым реализованный в управляющей технической системе наблюдатель может в любой момент совместно действовать независимо от того, какая структура регулирования задействована, то есть отключение регулятора состояния или временная замена другой структурой регулирования не оказывает влияния на наблюдателя.
Усиление наблюдателя, обозначенное на фиг.5 через весовые коэффициенты L1-L5, выбирается таким образом, что ошибка е наблюдателя стабилизируется и соответственно быстро ослабляется. Это соответствует регулированию дуальной системы (с системными матрицами A D=A O T, b D=c O и c D T=b O T, индекс D соответствует дуальной системе) посредством регулятора состояния.
Если расчет усилений наблюдателя осуществляется не посредством жесткого задания полюсов наблюдателя, а за счет проектирования LQR для дуальной системы, то получают калмановский фильтр. Взвешивания Q O и rO соответствуют тогда ковариациям шума системы и шума измерений.
Соответствующее матричное дифференциальное уравнение Riccati имеет вид аналогично LQR-проектированию:

и усиление наблюдателя получается для стационарного решения P O в следующем виде:
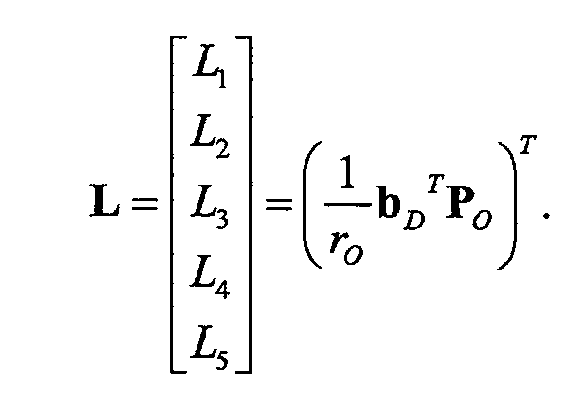
Это уравнение вектора L обратной связи с постоянным параметром b D T служит для вычисления усиления L1-L5 наблюдателя.
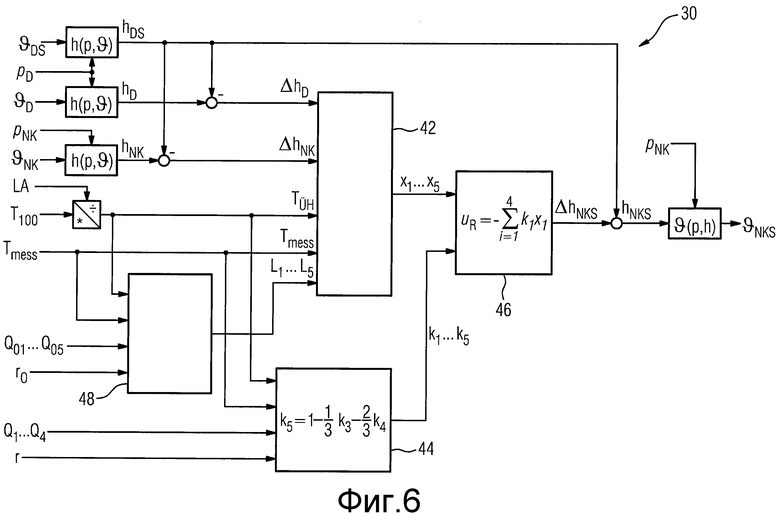
Обзор структуры LQG-регулятора 30 в качестве регулятора состояния показан на фиг.6. Сначала осуществляется пересчет от температур к энтальпиям с помощью таблицы параметров водяного пара. Усиление k1-k5 регулятора и усиление L1-L5 наблюдателя вычисляются в зависимости от постоянных времени, параметров регулирования и нагрузки паросиловой установки 2.
Представленный на фиг.5 наблюдатель 42 подает состояния х1-х4, а также наблюдаемую помеховую величину х5=qF. Усиление k T или k1-k5 регулятора (уравнение 6), а также взвешивание k5 включения помеховой величины (уравнение 2) дает MRDGL (уравнение 5). Усиление L наблюдателя дает MRDGL-наблюдателя 48 из уравнения (7). Регулятор 46 состояния обуславливает обратную связь согласно уравнениям 1-4, причем включение помеховой величины - k5x5 интегрировано уже в представление суммы i=1-5 регулятора 46 состояния. В заключение осуществляется вновь пересчет с помощью таблицы параметров водяного пара, чтобы перевести заданное значение hNKS энтальпии после впрыскивающего охладителя 6 в заданное значение температуры. Оно может затем применяться для регулирования впрыскивающего охладителя.
Представленный на фиг.6 регулятор 30 состояния должен параметризироваться не посредством постоянных коэффициентов усиления k1-k5 и L1-L5, а посредством постоянных времени участка регулирования и установки весовых коэффициентов. К тому же, оптимальные коэффициенты усиления не являются постоянными, так как постоянные времени модели участка зависят от нагрузки. Решение матричных уравнений Riccati должно поэтому осуществляться в рамках метода управления, который в любой момент времени располагает соответствующими параметрами. Поэтому предварительное интегрирование матричных дифференциальных уравнений Riccati (MRDGL) не является целесообразным.
Из вышеприведенных MRDGL для каждой рабочей точки отыскивается собственно только стационарное решение, то есть правая сторона MRDGL устанавливается в нуль и получается алгебраическое уравнение Riccati (ARE). Для решения этого квадратичного матричного уравнения имеются эффективные алгоритмы, которые могут быть без проблем реализованы в методе управления.
Поэтому здесь был выбран другой путь, который в особенности соответствует переменному во времени характеру уравнений системы за счет зависимых от нагрузки постоянных времени: MRDGL решается путем интегрирования по времени. Однако оно при прямом интегрировании является нестабильным и поэтому целесообразным способом интегрируется обратно по времени. За счет простого обращения знака получается DGL, которое является стабильным при прямом интегрировании и имеет такое же стационарное решение. Только при переменных по времени процессах, то есть во время изменений нагрузки и при изменении параметров установки, найденное путем прямого интегрирования решение отклоняется от теоретически оптимального хода решения, которое может определяться только обратным интегрированием.
Реализация предложенного выше принципа регулирования в методе управления осуществляется путем соединения стандартных компонентов, то есть четырех основных типов вычислений и интеграторов. Эти компоненты работают в методе управления исключительно со скалярными величинами. Не существует никаких имеющих векторные значения или даже матричные значения сигналов и, тем самым, также, например, никаких компонентов для произведения двух матриц.
Поэтому матричные дифференциальные уравнения Riccati, которые необходимы для вычисления усиления k регулятора и усиления L наблюдателя, переводятся в систему скалярных дифференциальных уравнений. Для этого системные матрицы для конкретной задачи вводятся в MRDGL и перемножаются. Получаются скалярные уравнения для отдельных матричных записей 
MRDGL построено симметрично. Если в матрице Q взвешивания, как описано выше, заполнена только главная диагональ, то отсюда следует, что матричные элементы Pi,j и Pj,i сходятся к тому же самому значению, и от него всегда накладываются друг на друга. Дифференциальные уравнения для этих матричных элементов соответственно идентичны, если устанавливается, что Pi,j=Pj,i. Если это свойство симметрии используется, то удовлетворяет рассмотрение треугольной матрицы.
Для вычисления 4×4-матрицы Р регулятора достаточны тем самым 10 скалярных дифференциальных уравнений вместо 16. Для 5×5-матрицы Р О наблюдателя соответственно достаточны 15 вместо 25 дифференциальных уравнений.
Усиления наблюдателя могут быть совместно вычислены в макрокомпоненте 48 метода управления. Макрокомпонент требует тем самым установочных параметров rO и QO1-QO5, постоянной времени Tmess измерительного звена, постоянной времени TÜH перегревателя, которая вычисляется из Т100 и сигнала нагрузки LA. Для каждого из 15 дифференциальных уравнений существует собственный под-макро, который реализует правую сторону DGL и содержит интегратор для соответствующего состояния POi,j.
Модель участка регулирования для наблюдателя 42 строится согласно фиг.5 в макроблоке. Только формирование отклонений энтальпии осуществляется вне макроблока. РТ1-звенья 34, 36 строятся из интеграторов с обратной связью с постоянной времени 1 секунда. Корректирующий член (Lj e) действует непосредственно на входе каждого интегратора, благодаря чему отсутствует умножение на соответствующую постоянную времени.
Пересчет от температурных значений на значения энтальпии может осуществляться на самом внешнем уровне макроблока компонента регулирования. Обращение к таблице параметров водяного пара требует, наряду с температурой, еще и соответствующего давления. Для температуры свежего пара это является давлением свежего пара, а для температуры после впрыскивающего охладителя соответствующим давлением перед перегревателем. Последнее часто отсутствует, однако может быть заменено давлением свежего пара, так как потеря давления на перегревателе не имеет значимого влияния. Хотя абсолютное значение энтальпии слегка изменяется из-за этого на входе перегревателя, однако основное увеличение энтальпии за счет перегревателя определяется посредством теплопоглощения. Целью пересчета в энтальпии является перевод в линейную систему. Незначительные ошибки энтальпии приводят, таким образом, к незначительным нелинейностям. Однако за счет вычисления в прямом и обратном направлении с одинаковым значением давления не возникают никакие погрешности равновесия.
Давление при пересчете между температурами и энтальпиями дает некоторого рода рабочую точку для линеаризации. Оно представляет, таким образом, зависимость от нагрузки пересчета. Поэтому не является важным подводить к компоненту регулирования каждое малое колебание давления; напротив, ему требуется относящееся к нагрузке «номинальное» давление. Часто возникающие быстрые колебания в измерении давления, поэтому, достаточно сгладить, например, с помощью РТ1-звена с постоянной времени 10 минут. При применении различных сигналов давления для давления свежего пара и давления после впрыскивающего охладителя следует обращать внимание на подобное сглаживание обоих сигналов.
Как изложено, реализованный регулятор является оптимальным относительно критерия качества, который учитывает качество регулирования и затраты на регулирование. Качество регулирования определяется матрицей Q взвешивания или в реализованном здесь случае диагональными элементами Q1-Q4.
Параметр r регулирования взвешивает затраты на регулирование в критерии качества по отношению к качеству регулирования. Большее значение имеет при этом более плавную характеристику регулирования при одновременной потере в качестве регулирования, меньшее значение приводит к более четкой характеристике регулирования.
Выбор критерия качества не зависит от реальных установок с их различными постоянными времени участков. Теоретически, при применении компонента регулирования на другой установке, достаточно согласование постоянных времени. В общем случае, для конкретных установок могла бы потребоваться совершенно отличающаяся четкая характеристика регулирования. Основным параметром для этого является r.
Матрица Q O ковариации калмановского фильтра задает ковариацию шума состояния модели наблюдателя. И здесь вновь заполнены только диагональные элементы. Меньшее значение ковариации означает, что соответствующее состояние очень хорошо описывается посредством уравнения модели. Напротив, большее значение означает, что имеется большое стохастическое отклонение. В случае реализованной модели наблюдателя три РТ1-звена 34, 36 относительно хорошо отображают передаточную характеристику перегревателя. Наблюдаемая помеховая величина, а именно удельный тепловой поток qF, напротив, вообще не моделируется. Это состояние изменяется чисто за счет помеховых влияний. Шум этого состояния имеет, таким образом, большую ковариацию.
Остающийся параметр rO регулирования дает ковариацию шумов измерения. Ее вновь можно видеть в соотношении с ковариацией шума состояния. Большее значение означает, что измерение является сильно зашумленным и следует больше полагаться на прогнозирование модели наблюдателя. Меньшее значение rO, напротив, указывает, что измерение является хорошим и что возможно возникающая ошибка наблюдателя должна соответственно четко корректироваться. Через rO также может устанавливаться скорость наблюдателя или калмановского фильтра. Ускорение наблюдателя возможно через уменьшение rO.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ПАРОСИЛОВОЙ УСТАНОВКИ, А ТАКЖЕ ПАРОСИЛОВАЯ УСТАНОВКА | 1998 |
|
RU2209320C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ С СИСТЕМОЙ ВПУСКА ВОЗДУХА | 2000 |
|
RU2264550C2 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ УРОВНЯ ЗАПОЛНЕНИЯ МЕЛЬНИЦЫ | 2007 |
|
RU2440849C2 |
| СПОСОБ ВОДОРОДНОГО ПЕРЕГРЕВА ПАРА НА АЭС | 2017 |
|
RU2661231C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПЕРЕГРЕТОГО ПАРА В ПАРОГЕНЕРАТОРЕ | 1991 |
|
RU2044216C1 |
| СПОСОБ РЕГУЛИРОВКИ КЛАПАНА | 2011 |
|
RU2516627C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ПРЯМОТОЧНОГО ПАРОГЕНЕРАТОРА | 2005 |
|
RU2372554C2 |
| РЕГУЛИРОВАНИЕ ТЕПЛОВОГО ЦИКЛИЧЕСКОГО ПРОЦЕССА | 2011 |
|
RU2545255C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ | 2012 |
|
RU2585377C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ШУМОВ В ПАССАЖИРСКОМ САЛОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2504025C2 |
Изобретение относится к энергетике. Способ для регулирования температуры пара для паросиловой установки, при котором регулятор состояния для выдачи заданной температуры пара подает по обратной связи в качестве регулирующего воздействия несколько состояний пара в перегревателе для перегрева пара с помощью наблюдателя, который рассчитывает эти состояния, и заданная температура пара передается на другой регулятор для регулирования температуры. Регулятор состояния является линейно-квадратичным регулятором. Также представлено устройство для осуществления способа. Изобретение позволяет достичь стабильного и точного регулирования температуры пара. 2 н. и 21 з.п. ф-лы, 6 ил.
1. Способ регулирования температуры (ϑD) пара (8) для паросиловой установки (2), при котором регулятор (46) состояния для выдачи заданной температуры (ϑNKS) пара подает по обратной связи в качестве регулирующего воздействия несколько состояний пара в перегревателе (6) для перегрева пара (8) с помощью наблюдателя (42), который рассчитывает эти состояния, и заданная температура (ϑNKS) пара передается на другой регулятор (32) для регулирования температуры, отличающийся тем, что регулятор (46) состояния является линейно-квадратичным регулятором.
2. Способ по п.1, отличающийся тем, что наблюдатель (42) является калмановским фильтром, который рассчитан на линейно-квадратичную обратную связь по состоянию.
3. Способ по п.1 или 2, отличающийся тем, что помеховая величина тепла (qF), вводимого посредством перегревателя (6) в пар (8), определяется как состояние (x5) и применяется в алгоритме регулирования.
4. Способ по п.1 или 2, отличающийся тем, что наблюдатель определяет тепло, вводимое в пар в перегревателе.
5. Способ по п.3, отличающийся тем, что наблюдатель определяет тепло, вводимое в пар в перегревателе.
6. Способ по п.4, отличающийся тем, что тепло (qF), вводимое в пар (8) в перегревателе (6), определяется посредством интегратора (38).
7. Способ по п.5, отличающийся тем, что тепло (qF), вводимое в пар (8) в перегревателе (6), определяется посредством интегратора (38).
8. Способ по п.1 или 2, отличающийся тем, что в качестве параметров состояния применяются энтальпии пара (8).
9. Способ по п.8, отличающийся тем, что в качестве параметров состояния применяются отклонения абсолютных энтальпий от заданных значений энтальпии.
10. Способ по п.9, отличающийся тем, что посредством пересчета измеренных значений температуры и заданных значений температуры в энтальпии осуществляется линеаризация математической задачи регулирования.
11. Способ по любому из пп.1, 2, 5-7, 9 или 10, отличающийся тем, что обратная связь по состоянию осуществляется через матричное уравнение, параметры которого определяются по меньшей мере частично с применением текущих измеренных значений.
12. Способ по п.3, отличающийся тем, что обратная связь по состоянию осуществляется через матричное уравнение, параметры которого определяются по меньшей мере частично с применением текущих измеренных значений.
13. Способ по п.4, отличающийся тем, что обратная связь по состоянию осуществляется через матричное уравнение, параметры которого определяются по меньшей мере частично с применением текущих измеренных значений.
14. Способ по п.8, отличающийся тем, что обратная связь по состоянию осуществляется через матричное уравнение, параметры которого определяются по меньшей мере частично с применением текущих измеренных значений.
15. Способ по любому из пп.12-14, отличающийся тем, что матричное уравнение вычисляется с помощью метода управления паросиловой установки.
16. Способ по п.11, отличающийся тем, что матричное уравнение вычисляется с помощью метода управления паросиловой установки.
17. Способ по любому из пп.12-14, отличающийся тем, что матричное уравнение переводится в систему скалярных дифференциальных уравнений.
18. Способ по п.11, отличающийся тем, что матричное уравнение переводится в систему скалярных дифференциальных уравнений.
19. Способ по п.17, отличающийся тем, что система скалярных дифференциальных уравнений решается интегрированием с обратным знаком.
20. Способ по п.18, отличающийся тем, что система скалярных дифференциальных уравнений решается интегрированием с обратным знаком.
21. Способ по п.1, отличающийся тем, что наблюдатель (42) работает независимо от регулятора (46) состояния.
22. Способ по п.1, отличающийся тем, что для расчета состояния применяется модель участка регулирования перегревателя (6), временное запаздывание которого определяется частным постоянной времени и сигнала нагрузки (LA) паросиловой установки (2).
23. Устройство для регулирования температуры (ϑD) пара (8) для паросиловой установки (2) с регулятором (46) состояния для выдачи заданной температуры (ϑNKS) пара в качестве регулирующего воздействия посредством подачи по обратной связи нескольких состояний пара перегревателя (6) для перегрева пара (8), и с наблюдателем (42), который вычисляет эти состояния, и с другим регулятором (32) для регулирования температуры (ϑNK) на основе заданной температуры (ϑNKS) пара, отличающееся тем, что регулятор (46) состояния является линейно-квадратичным регулятором.
| ИНГИБИТОРЫ GSK-3 | 2006 |
|
RU2449998C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ПАРОВОЗДУШНОЙ СМЕСИ В КАМЕРЕ ОШПАРИВАНИЯ ПРИ ПРОИЗВОДСТВЕ БАРАНОЧНО-СУШЕЧНЫХ ИЗДЕЛИЙ | 2010 |
|
RU2449215C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПЕРЕГРЕТОГО ПАРА В ПАРОГЕНЕРАТОРЕ | 1991 |
|
RU2044216C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ПЕРЕГРЕТОГО ПАРА ЭНЕРГЕТИЧЕСКОГО КОТЛА И КОТЕЛЬНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2069291C1 |
| ОХЛАДИТЕЛЬНАЯ УСТАНОВКА | 2000 |
|
RU2160867C1 |
| US 4241701 A, 30.12.1980 | |||
| СПОСОБ ИСПЫТАНИЯ ШИНЫ | 0 |
|
SU285297A1 |

