Изобретение относится к радиолокации, в частности к радиолокационным измерениям, и может быть использовано при создании новых радиолокационных измерительных комплексов и модернизации существующих.
Известна система непрерывного излучения для измерения радиолокационного поперечного сечения (эффективной поверхности рассеяния (ЭПР)) целей, содержащая приемопередатчик, опорно-поворотное устройство с приводом и самописцем [1, с.1046].
В данном устройстве информация об угле поворота объекта поступает от опорно-поворотного устройства с дискретностью, не превышающей одного углового градуса.
Недостатком известной системы непрерывного излучения для измерения радиолокационного поперечного сечения (ЭПР) является малая (360 точек) дискретизация круговых диаграмм ЭПР, что приводит к большим погрешностям расчетов статистических характеристик ЭПР (среднего значения, дисперсии и др.).
Известен также комплекс RAT SCAT для измерения радиолокационного поперечного сечения целей (ЭПР) [1, с.1085], содержащий приемопередатчик, опорно-поворотное устройство с платформой и приводом. На опорно-поворотном устройстве размещается объект измерения. Данный комплекс выбран за прототип.
Недостатком данного комплекса является недостаточная дискретизация азимутального угла (через 0,1°), что приводит к ошибкам расчета статистических характеристик ЭПР, превышающих 3-4 дБ.
Техническим результатом данного изобретения является повышение точности расчета статистических характеристик ЭПР (среднего значения, дисперсии и др.) за счет уменьшения интервалов дискретизации, обозначаемых метками, круговых и секторных диаграмм ЭПР.
Для достижения технического результата в радиолокационный измерительный комплекс, содержащий приемопередатчик, опорно-поворотное устройство с платформой, малоотражающей опорой и приводом вращения, объект измерения, установленный на малоотражающей опоре, введены последовательно соединенные электронная цифровая вычислительная машина (ЭЦВМ), предназначенная для формирования массива результатов измерений, блок сопряжения и индикации, блок управления приводом платформы, а также введены два датчика угла поворота платформы по азимуту, закрепляемые на платформе и соединенные с блоком формирования меток дискретизации углов азимута, который соединен с блоком сопряжения и индикации прямой и обратной связью, а ЭЦВМ соединена с приемопередатчиком прямой и обратной связью.
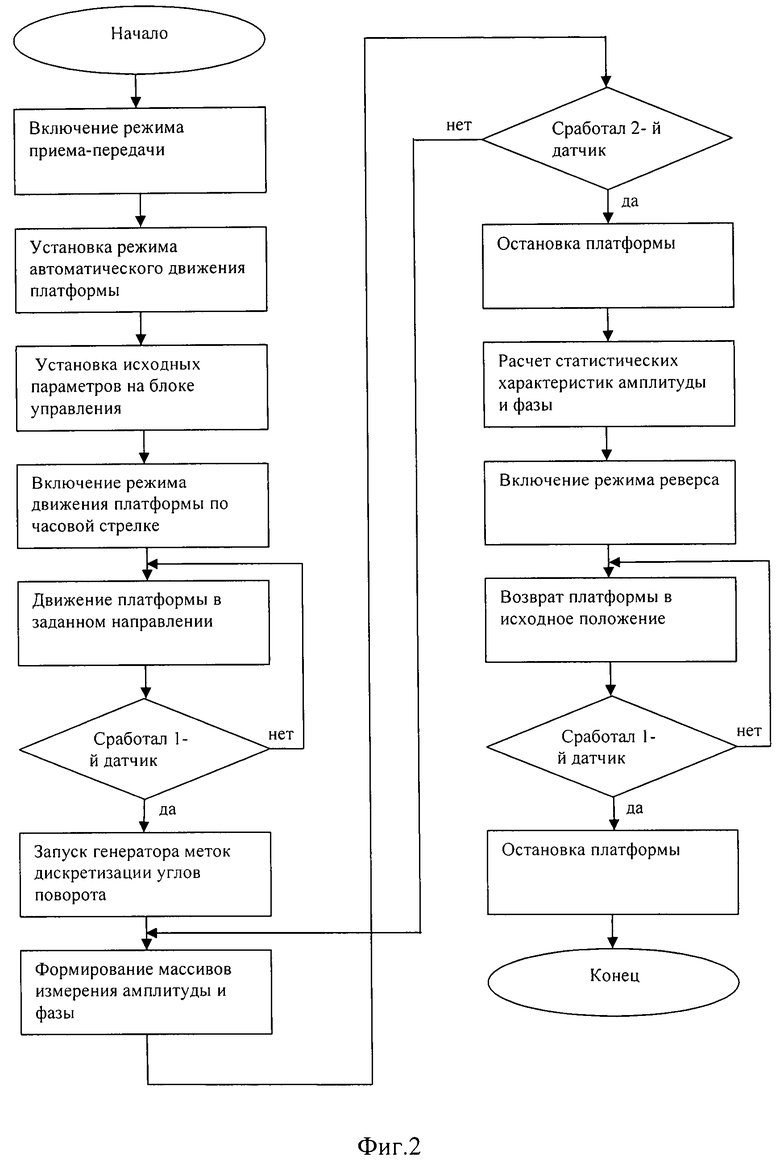
На фиг.1 представлена блок-схема радиолокационного измерительного комплекса. На фиг.2 представлен алгоритм функционирования радиолокационного измерительного комплекса.
Радиолокационный измерительный комплекс (фиг.1) состоит из: приемопередатчика 1; ЭЦВМ 2; блока сопряжения и индикации 3; блока формирования управляющих сигналов 4; блока управления приводом вращения платформы 5; привода опорно-поворотного устройства 6; платформы 7; малоотражающей опоры 8; объекта измерения 9; двух датчиков угла поворота платформы 10-1, 10-2; блока формирования меток дискретизации углов поворота 11.
Радиолокационный измерительный комплекс работает следующим образом (Фиг.2).
Приемопередатчик 1 обеспечивает зондирование объекта измерений 9, установленного на малоотражающей опоре 8, и прием отраженных сигналов. При вращении платформы 7 записываются круговые или секторные диаграммы обратного излучения сигнала, который в виде амплитуды и фазы регистрируется в ЭЦВМ 2. В ЭЦВМ 2 устанавливают режим автоматического движения платформы 7. Блок сопряжения и индикации 3 обеспечивает индикацию прохождения команд и сопряжение ЭЦВМ 2 с аналоговыми устройствами блока 4. Блок 4 формирует аналоговые управляющие сигналы и передает их в блок управления приводом 5, который включает привод движения 6 платформы 7. Включают выбранный режим движения платформы 7, например, по часовой стрелке. При срабатывании первого датчика 10-1 запускается генератор меток дискретизации угла поворота платформы 7 в блоке 11. Блок дискретизации 11 обеспечивает выдачу 18640 меток при круговом и секторном угле диаграммы ЭПР. При этом при подходе очередной метки дискретизации угла поворота платформы 7 в ЭЦВМ 2 производится отсчет значений амплитуды и фазы отраженного сигнала от объекта 9. Таким образом формируется массив результатов измерений в ЭЦВМ 2.
При срабатывании второго датчика 10-2 происходит остановка платформы 7. Производится расчет статистических характеристик амплитуды и фазы (среднее значение, дисперсия и др.). После чего включается режим реверса и происходит движение платформы 7 в исходное положение. При проходе первого датчика 10-1 происходит останов платформы.
Элементная база блоков.
ЭЦВМ 2 типа IBM PC Pentium 4.
Блок приемопередатчика 1 - типовой.
Блок сопряжения и индикации 3 собран на микросхемах серии 155ЛАЗ и светодиодах.
Блок формирования управляющих сигналов 4 состоит из оптронов типа ТО 125-125 и АОУ 103Д.
Блок управления приводом 5 состоит из выпускаемых серийно пускателей электродвигателей.
Привод вращения платформы 6 состоит из электродвигателя 4ААМ 561 РЛ6 с редуктором.
Датчики угла поворота платформы 10-1, 10-2 собраны на базе герконов.
Блок формирования меток дискретизации углов поворота платформы 11 состоит из инкриментного энкодера (покупное изделие), логических микросхем 5-й серии и транзисторов.
Наличие элементной базы и ее широкая известность показывают, что изобретение может удовлетворять условию патентоспособности «промышленная применимость».
Проведенный анализ уровня техники позволяет установить, что технические решения, характеризующиеся совокупностью признаков, идентичных всем признакам, содержащимся в предложенной заявителем формуле изобретения, отсутствуют, что указывает на соответствие заявляемого изобретения критерию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными признаками заявленного устройства, показали, что в общедоступных источниках информации не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками. Из уровня техники также не подтверждена известность влияния отличительных признаков заявленного изобретения на указанный заявителем технический результат, следовательно, заявленное изобретение соответствует условию «изобретательский уровень»
Литература.
1. Блексмит П., Хайатт Р.Е., Мак Р.В. Введение в методы измерения радиолокационного сечения цели. ТИИЭР, т.53. №8.
2. Марлоу, Ватсон и Ван-Хозер. Комплекс RAT SKAT для измерения радиолокационного поперечного сечения целей. ТИИЭР. 1965, т.53, №8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2371730C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ УЧАСТКОВ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2014 |
|
RU2560935C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И МНОГОПОЗИЦИОННЫЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516221C2 |
| УСТРОЙСТВО ПОДВЕСА ОБЪЕКТА ПРИ ИЗМЕРЕНИИ ЕГО ЭПР | 1993 |
|
RU2094813C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| ПЕРЕНОСНАЯ МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СЕКТОРНОГО ОБЗОРА ПРОСТРАНСТВА | 2024 |
|
RU2832851C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| УСТРОЙСТВО ДЛЯ ДВУХПОЗИЦИОННЫХ ИЗМЕРЕНИЙ РАДИОЛОКАЦИОННЫХ ХАРАКТЕРИСТИК РАДИОПОГЛОЩАЮЩИХ ПОКРЫТИЙ | 2007 |
|
RU2353948C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |

Изобретение относится к радиолокации, в частности к радиолокационным измерениям, и может быть использовано при создании новых радиолокационных измерительных комплексов и модернизации существующих. Достигаемый технический результат изобретения - повышение точности расчета статистических характеристик круговых и секторных диаграмм ЭПР за счет уменьшения интервалов дискретизации, обозначаемых метками. Для достижения технического результата в радиолокационный измерительный комплекс, содержащий приемопередатчик, опорно-поворотное устройство с платформой, малоотражающей опорой и приводом вращения, объект измерения, установленный на малоотражающей опоре, введены последовательно соединенные электронная цифровая вычислительная машина (ЭЦВМ), предназначенная для формирования массивов результатов измерений, блок сопряжения и индикации, блок управления приводом платформы, а также введены два датчика угла поворота платформы по азимуту, закрепляемые на платформе и соединенные с блоком формирования меток дискретизации углов азимута, который соединен с блоком сопряжения и индикации прямой и обратной связью, а ЭЦВМ соединена с приемопередатчиком прямой и обратной связью. 2 ил.
Радиолокационный измерительный комплекс, содержащий приемопередатчик, опорно-поворотное устройство с платформой, малоотражающей опорой и приводом вращения, объект измерения, установленный на малоотражающей опоре, отличающийся тем, что в него введены последовательно соединенные электронная цифровая вычислительная машина (ЭЦВМ), предназначенная для формирования массива результатов измерений, блок сопряжения и индикации, блок формирования управляющих сигналов, блок управления приводом вращения, а также введены два датчика угла поворота платформы по азимуту, закрепляемые на платформе и соединенные с блоком формирования меток дискретизации углов азимута, который соединен с блоком сопряжения и индикации прямой и обратной связью, а ЭЦВМ соединена с приемопередатчиком прямой и обратной связью.
| БЛЕКСМИТ П | |||
| и др | |||
| Введение в методы измерения радиолокационного сечения цели | |||
| ТИИЭР, т.53, №8, с.1085 | |||
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2371730C1 |
| Способ приготовления водной суспензии инсектофунгисидов | 1948 |
|
SU74217A1 |
| СПОСОБ ПРОГНОЗА ПЕРЕХОДА СЕНИЛЬНОЙ МАКУЛЯРНОЙ ДЕГЕНЕРАЦИИ ИЗ ПРЕДИСЦИФОРМНОЙ СТАДИИ В ДИСЦИФОРМНУЮ У ПАЦИЕНТОВ С ГИПЕРТОНИЧЕСКОЙ БОЛЕЗНЬЮ | 2007 |
|
RU2348043C1 |
| US 5379110 А, 03.01.1995 | |||
| ГЕНЕРАТОР ОПОРНОГО НАПРЯЖЕНИЯ С НИЗКИМ ИМПЕДАНСОМ | 2012 |
|
RU2592719C2 |
| US 5969664 А, 19.10.1999. | |||

