Изобретение относится к области радиолокации и предназначено для использования на вертолетах и самолетах.
Известны вертолетные радиолокационные станции для ударных вертолетов, предназначенные для обзора земной и водной поверхности и обнаружения расположенных на ней объектов, осуществляющие обзор путем секторного качания луча антенны в азимутальной плоскости. Зона обзора такой РЛС представляет собой сектор с радиусом, соответствующим дальности действия РЛС. Однако их применение для обнаружения отраженных сигналов от малоразмерных целей (σц< 5 м2) в условиях отражений от подстилающей поверхности не дает должного эффекта. Ниже приводится доказательство этого утверждения. Основной характеристикой, определяющей возможность применения РЛС для обнаружения или распознавания наземной и морской цели на фоне подстилающей поверхности, является разрешающая способность.
Обобщенной характеристикой разрешающей способности может служить площадь разрешаемого элемента на местности, в пределах которого цели или элементы не разрушаются.
При этом диаграмма направленности антенны по азимуту определяет линейную разрешающую способность по азимуту dL. А ширина спектра зондирующего сигнала определяет линейную разрешающую способность по дальности dr. При обнаружении наземных и морских объектов на фоне подстилающей поверхности характеристики обнаружения зависит от соотношения сигнал/шум+фон:
где Pс - отраженная мощность сигнала от объекта,
Pш - мощность собственных шумов приемного канала,
Pф - мощность отражений от подстилающей поверхности.
При низком уровне собственных шумов приемника по сравнению с фоновой составляющей сигнала Pш<<Pф отношение сигнал/шум+фон будет определяться:
где σц - эффективная площадь отражений от объекта,
σф - эффективная площадь отражений подстилающей поверхности.
Учитывая, что эффективная площадь отражений подстилающей поверхности определяется
σф= dL•dr•σo, (Ia)
где σo - удельное ЭПР подстилающей поверхности, поэтому и характеристики обнаружения объектов на фоне подстилающей поверхности будут существенно зависеть от разрешающей способности РЛС.
Из формул I и Ia следует, что даже при малом коэффициенте отражений σo обнаружение малоразмерных σц< 10 м2 объектов на фоне поверхности может обеспечиваться только при очень высокой разрешающей способности.
Так для обнаружения объекта с σц= 10 м2 на фоне поверхности с σo= 5•10-3 и вероятностью правильного обнаружения Pпо= 0,7, при вероятности ложной тревоги Pлт= 10-6, разрешаемый элемент поверхности не должен превышать 200 м2, что соответствует линейному разрешению по азимуту и дальности 15 м. Для получения такого линейного разрешения по азимуту на дальности Д≈5 км диаграмма направленности антенной системы в азимутальной плоскости не должна превышать: θ ≤ 0,2°.
В то время как на вертолетах при применении антенны с диаметром раскрыва 0,8 метра и длине волны λ = 8 мм можно получить угловое разрешение не лучше чем θ = 0,6o.
Известны также самолетные и вертолетные радиолокационные станции, в которых высокое угловое разрешение обеспечивается за счет синтезирования апертуры антенны.
Такие РЛС за счет движения самолета или вертолета позволяют получать угловое разрешение, обеспечивающее обнаружение малоразмерных целей.
Однако они не решают задачи самолетов и вертолетов, требующих обнаружение и определение координат малоразмерных объектов в направлении вектора скорости. И не работоспособны в условиях отсутствия скорости движения (например, зависания вертолета).
Как известно ("Радиолокационные станции с цифровым синтезированием апертуры антенны", Москва, Радиосвязь, 1988 г., стр. 124) угловое разрешение РЛС при синтезировании будет:
где λ - длина излучаемой волны,
U - скорость летательного аппарата,
Tс - время синтезирования,
α - угол между вектором скорости и линией визирования на объект.
Из формулы следует, что когда вектор скорости будет направляться на объект, тогда угол α будет стремиться к нулю. В этом случае эффект синтезирования апертуры практически исключается и угловое разрешение будет соответствовать реальной диаграмме антенны.
Из формулы также видно, что при скорости U=0 (режим зависания вертолета) синтезирование также исключается. По существу устройство синтезирования диаграммы направленности антенны представляет собой совокупность РЛС и летательного аппарата, характеристики которой (угловое разрешение, уровень лепестков и др.) определяются как РЛС, так и летательным аппаратом.
В качестве аналога вертолетных РЛС могут быть БРЛС, применяемые в настоящее время на ударных вертолетах. Типичными вертолетными РЛС для обнаружения наземных и надводных целей являются WX-50 фирмы Westinghoyse, РЛС AN/APQ-137 Emerson Elektrik, РЛС Longbow США
Эти РЛС традиционного построения. Для повышения углового разрешения при ограниченной апертуре антенны эти РЛС разрабатываются в диапазоне миллиметровых радиоволн. Однако в технической литературе кроме технических характеристик подробного построения не приводится.
Известны аналоги самолетных и вертолетных РЛС, которые работают в режиме синтезирования апертуры антенны.
В качестве аналога БРЛС с синтезированной апертурой для обнаружения наземных объектов может быть БРЛС фирмы "Hughes" APG-65, размещаемая на самолете истребителе F-16 или БРЛС-APG-70, устанавливаемая на самолете F-15 США. Эти БРЛС за счет движения самолета обеспечивают картографирование земной поверхности с высоким угловым разрешением синтезированной апертурой антенны. Эти станции могли бы быть прототипами для предлагаемого варианта. Однако кроме характеристик и общего вида этих станций, другой информации по детальному их построению в технической литературе не приведено.
В связи с этим в качестве прототипа рассматривается "Бортовая самолетная радиолокационная станция картографирования" земной поверхности" МКИ G 01 S - 13/90.
- решение о выдаче: 61-11326
- номер заявки: 52-158558
- дата подачи заявки: 27/XII-1977 г.
- номер заявки: 53-85192
- дата выдачи: 27/VII-1978 г.
- приоритет: от 3/I-1977 г. США заявка N 756455
- изобретатель: Натан Спосби, г. Кантон шт. Массачусетс, США
- заявитель: фирма "Рейтеон", г. Лексингтон, шт. Массачусетс, США
- патентный поверенный: Кесан Юаса
Перевод выполнен с японского языка описания изобретения к акцептованной заявке Всесоюзным центром переводов научно-технической литературы и документации (ВЦП) МКИ G 01 S 13/90. Перевод NC-54918 от 29.06.89 г.
Блок-схема бортовой радиолокационной станции прототипа представлена на фиг. 1.
В соответствии с нумерацией блоков в представленной в патенте блок-схеме радиолокационная станция прототипа состоит:
1. блок 41 - антенна
2. блок 43 - циркулятор
3. блок 45 - усилитель мощности
4. блок 47 - импульсный генератор
5. блок 49 - блок синхронизации и управления
6. блок 51 - смеситель
7. блок 53 - гетеродин
8. блок 55 - когерентный генератор
9. блок 57 - смеситель
10. блок 61 - фазовый детектор
11. блок 63 - аналого-цифровой преобразователь (АЦП)
12. блок 65 - вычислитель компенсации движения
13. блок 67 - компьютер управления РЛС
14. блок 69 - инерциальная платформа
15. блок 79 - устройство обработки сигналов
16. блок 81 - устройство формирования и отображения радиолокационной информации
Как следует из описания, РЛС предназначена для картографирования земной поверхности как в режиме бокового, так и переднебокового обзора. Когерентность станции обеспечивается специальными стабильными генераторами. Возможность когерентного суммирования отраженных сигналов в каждом элементе дальности при всех эволюциях самолета обеспечивается путем компенсации фазовых изменений принимаемых сигналов доплеровской частоты на основе измерений параметров движения фазового центра антенны.
При этом с помощью вычислителя компенсации движения (65), и блока синхронизации и управления (49), и компьютера управления РЛС (67) в каждом элементе дальности путем изменения частоты повторения компенсируются изменения доплеровской частоты. Также с помощью вычислителя компенсации движения (65), блока синхронизации и управления (49) и компьютера управления (67) обеспечивается стабилизация зоны приема гребенки стробов АЦП по дальности относительно земли при движении самолета. Кроме того, вычислитель компенсации движения вычисляет фазовый сдвиг для каждого импульса и передает его в устройство обработки сигналов (79), чтобы перед быстрым преобразованием Фурье произвести компенсацию средней доплеровской частоты. В этой РЛС компенсация фазовых изменений сигналов и стабилизация положения гребенки стробов по дальности относительно земли производится на основе измерения параметров движения самолета (скорости и ускорения) с помощью инерциальной платформы.
Все вышесказанное в части возможностей синтезирования апертуры антенны относится как к аналогам, так и к прототипу. Наилучшие результаты по угловому разрешению у этих БРЛС с синтезированной апертурой имеют место при боковом обзоре (угол α = 90o). Ухудшение углового разрешения наблюдается при уменьшении угла α. И при угле α = 0o (т.е. в направлении вектора скорости) угловое разрешение определяется реальной диаграммой направленности антенны. И естественно, что при скорости вертолета U=0 (режим зависания вертолета) режим синтезирования не работает и угловое разрешение также определяется реальной диаграммой направленности антенны.
Однако отмеченная выше совокупность БРЛС и летательного аппарата как средства получения синтезированной диаграммы с заданными характеристиками позволяет устранить указанные недостатки.
Задача предлагаемого изобретения заключается в получении высокого углового разрешения по азимуту в вертолетной РЛС как в направлении вектора скорости полета, так и в режиме зависания вертолета. Поставленная задача достигается тем, что носовой части вертолета и соответственно размещенной в носовой части антенне придается движение в горизонтальной плоскости. При этом электрическая ось антенны устанавливается перпендикулярно к направлению движения, см. фиг. 2. Такое движение осуществляется за счет вращения корпуса вертолета в пределах заданного сектора вокруг винта вращения лопастей. В процессе движения для реализации синтезированной апертуры антенны производится излучение и когерентное суммирование отраженных сигналов.
В БРЛС, состоящей из антенны, передатчика, циркулятора, приемника, процессора сигналов, процессора данных и управления РЛС, датчика углов и двигателя антенны по азимуту, инерциальной платформы, вводятся задающий генератор, синтезатор частот - синхронизатор, измеритель угловой скорости и блок управления антенны. А также вводятся командно-информационные линии связи БРЛС с пилотажно-навигационным комплексом (ПНК), вычислительные устройства ПНК и исполнительное устройство для управления вертолетом в режиме синтезирования аппаратуры.
Во время движения антенна излучает когерентные импульсы передатчика и после отражения от объекта их принимает. За счет движения антенны путем обработки и когерентного суммирования в каждом элементе дальности принимаемых отраженных сигналов от объектов создается искусственная (синтезированная) диаграмма антенны. Возможность когерентного суммирования принятых отраженных сигналов обеспечивается путем компенсации фазовых изменений принимаемых сигналов доплеровской частоты. Компенсация фазовых изменений проводится:
- в режиме зависания вертолета на основе измерения угловой скорости Ωу строительной оси вертолета и трех составляющих ускорения (ax, ay, az) фазового центра антенны;
- в режиме движения вертолета на основе вышеприведенных и дополнительных измерений, трех составляющих скорости движения фазового центра антенны (Vx, Vy, Vz).
В результате когерентного суммирования формируется выходной сигнал, соответствующий сигналу, принятому синтезированной диаграммой направленности, шириной θc существенно меньшей ширины диаграммы направленности реальной антенны θ .
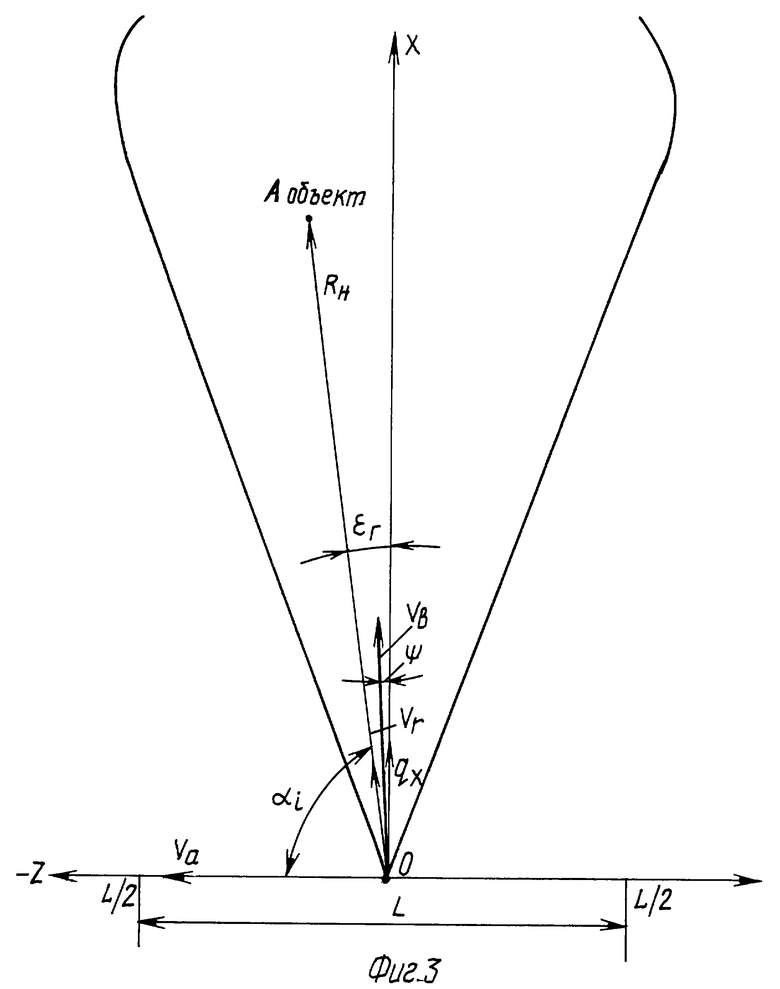
Роль апертуры синтезированной антенны в этом случае играет длина траектории L движения антенны (см. фиг. 3). Время когерентного суммирования сигналов Tс определяется скоростью движения и длиной L траектории движения носовой части вертолета (антенны).
На фиг. 2 представлено вращение носовой части вертолета с антенной в пределах заданного сектора. Особенностью такого вращения является стабилизация углового положения электрической оси антенны перпендикулярно траектории движения (хорда L), обеспечивающая облучение поверхности и прием отраженных сигналов в заданной зоне обнаружения.
Из фиг. 2 следует, что линейная скорость антенны:
где Ωу - угловая скорость вращения строительной оси вертолета (антенны);
l - расстояние между осью вращения до антенны;
β - угол сектора вращения строительной оси.
Длина траектории движения L, которая определяет угловое разрешение при синтезировании, равна хорде 
На фиг. 3 представлено движение антенны в пределах интервала синтезирования ± L/2 для режима зависания вертолета.
В связи с тем, что высота полета вертолета h практически меньше дальности обнаружения h << Rн, рассматривается движение в горизонтальной плоскости в координатах инерционной системы OX; Z. На фиг. 3 показан момент прохождения антенной середины интервала синтезирования. В точке A расположен объект.
Если ограничиться квадратичным членом разложения в ряд Тейлора текущее расстояние до объекта будет:
Фаза траекторного сигнала при такой аппроксимации изменяется по закону
Доплеровская частота траекторного сигнала
Второй член определяет ширину спектра Δfд доплеровских частот траекторного сигнала. Средняя частота сигнала равна нулю, когда линия визирования на объект перпендикулярна направлению движения.
Время синтезирования "Tс" выбирается исходя из требуемой угловой разрешающей способности по азимуту Δα
При этом ширина спектра доплеровских частот обрабатываемой части траекторного сигнала будет составлять
Из формулы [5] следует, что угловая разрешающая способность Δα соответствует
При движении антенны перпендикулярно линии визирования на объект разрешающая способность Δα будет
Из формулы по аналогии с антенной техникой размер синтезированной апертуры L = Uа • Tс.
Таким образом, разрешающая способность РЛС будет определяться физической длиной L участка движения антенны. Однако следует отметить (см. формулу 6), что разрешающая способность при синтезированной апертуре (при одной и той же апертуре) в два раза лучше, чем в реальной антенне.
Как следует из формулы [3], для реализации когерентного накопления необходимо при движении компенсировать изменения фазы траекторного сигнала в зависимости от скорости, угла и дальности, обеспечивая когерентность при суммировании.
Получение высокого азимутального разрешения в предлагаемой радиолокационной системе обеспечивается с помощью следующей процедуры обработки. Излученный движущейся антенной импульсной зондирующий сигнал отражается от объектов и поверхности и с некоторой задержкой, определяемой расстоянием, принимается этой же антенной и поступает на вход приемника. После преобразования на промежуточную частоту радиосигнал поступает на два синхронных фазовых детектора, опорные сигналы которых сдвинуты относительно друг друга на π/2 . С выхода фазовых детекторов поступают мнимая и действительная составляющие комплексной огибающей сигнала. Так как обработка сигнала производится цифровым процессором с помощью аналогоцифрового преобразователя, огибающая сигнала стробируется по времени (дальности) и амплитуда преобразовывается в цифровой вид.
Обработка сигнала проводится методом гармонического спектрального анализа. В этом случае сигналы радиолокационного изображения одной стрбированной полоски дальности на выходе системы обработки в аналоговой форме могут быть описаны
где sвх(τ;αi) - комплексный сигнал на входе системы обработки, отраженный от объекта, расположенного под углом αi относительно вектора скорости;
τ - текущее время на интервале накопления на интервале движения антенны;
T - время синтезирования;
A(τ;αi) - - амплитуда сигнала;
ϕ(τ;αi) - - фаза сигнала;
h·(τ) - - опорная функция, комплексно сопряженная с сигналом отражения от объекта;
H(τ) - весовая функция, определяющая заданный уровень боковых лепестков;
Var - составляющая скорости движения антенны в направлении на объект Uar= Ua•cosαi;
aar - составляющая ускорения движения антенны в направлении на объект 
λ - длина излучаемой волны;
ar - составляющая ускорения, связанная с вращением и рысканьем носовой части вертолета (антенны).
В частном случае, когда вертолет находится в режиме зависания на малой высоте и происходит вращение корпуса в заданном угловом секторе, опорная функция, комплексно сопряженная с сигналом, отраженным от объекта, будет (см. фиг. 3 угол αi= (90-εr))
где Ωу - угловая скорость движения антенны;
l - расстояние между осью вращения и антенной;
β - угол сектора вращения;
εr/- угол между направлением и осью X на объект;
ax - составляющая ускорения по оси X;
az - составляющая ускорения по оси Z.
Первый член этой формулы: линейный член Δϕл , второй и третий член квадратичный Δϕкв .
В общем случае, когда вертолет движется на высоте и углом наклона εв пренебречь нельзя, в опорную функцию дополнительно вводят значения радиальной скорости Vr2 и тангенциальной составляющей Vt2 связанных с движением вертолета в координатах X, Y, Z а также радиального ускорения ar2, связанного с движением вертолета по координате Y.
При этом радиальная составляющая скорости Vr2 , тангенциальная составляющая Vt2 и ускорения ar2 вычисляются:
где Vx, Vy, Vz - составляющие скорости по осям X, Y, Z
ay - составляющая ускорения по оси Y;
ψ - угол между вектором скорости и осью X;
εв - угол между направлением на объект и плоскостью OXZ.
Радиальная составляющая ускорения за счет ускорения Oy будет:
При цифровой обработке во время движения антенны вычисляются действительная и мнимая составляющие опорной функции для каждого элемента дальности в каждом периоде повторения излучаемых импульсов в течение всего времени синтезирования "Tс".
В соответствии с вышеизложенным признаки и преимущества предлагаемой радиолокационной системы приводятся ниже.
На фигурах 1-6 представлены чертежи, поясняющие описание предложенной БРЛС.
На фиг. 1 приведена блок-схема радиолокационной системы прототипа.
На фиг. 2 приведен чертеж, поясняющий движение антенны за счет вращения корпуса вертолета.
На фиг. 3 приведен чертеж, поясняющий наличие доплеровских и фазовых изменений при движении антенны.
На фиг. 4 представлена блок-схема предложенной БРЛС, отвечающая формуле изобретения.
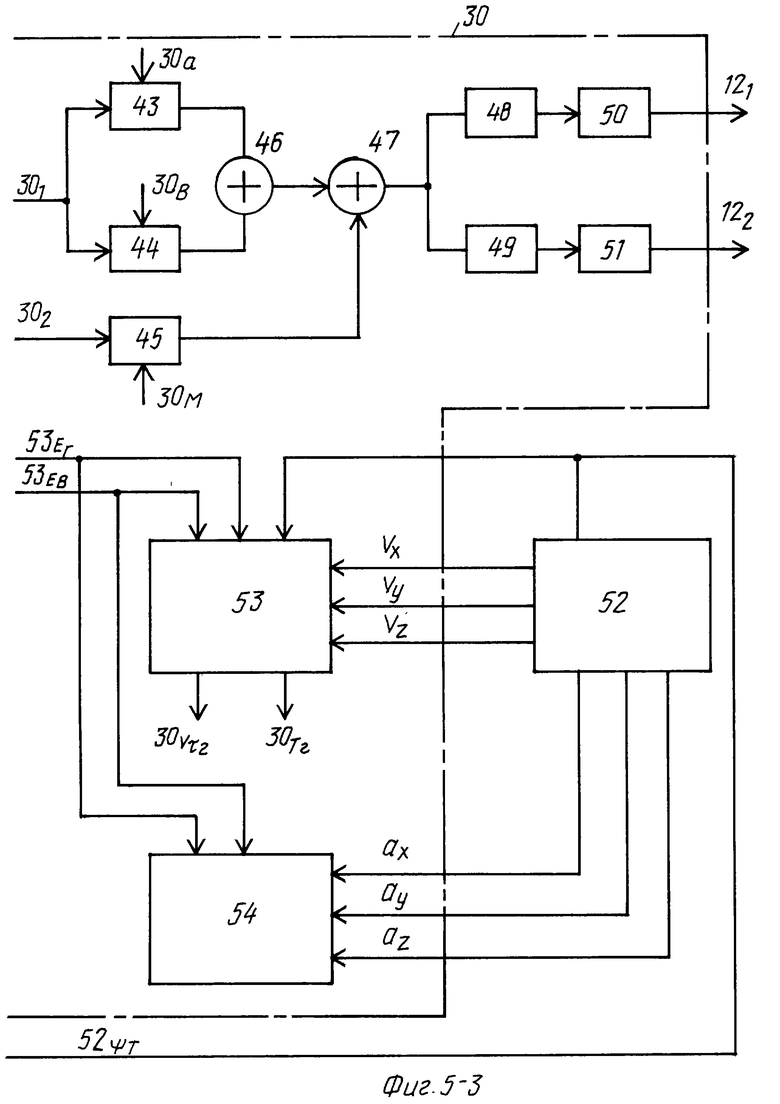
На фиг. 5 на трех листах (5-1, 5-2 и 5-3) представлена развернутая блок-схема предложенной на фиг. 4 БРЛС, в которой подробно изложен процесс формирования и обработки сигналов для получения синтезированной апертуры антенны.
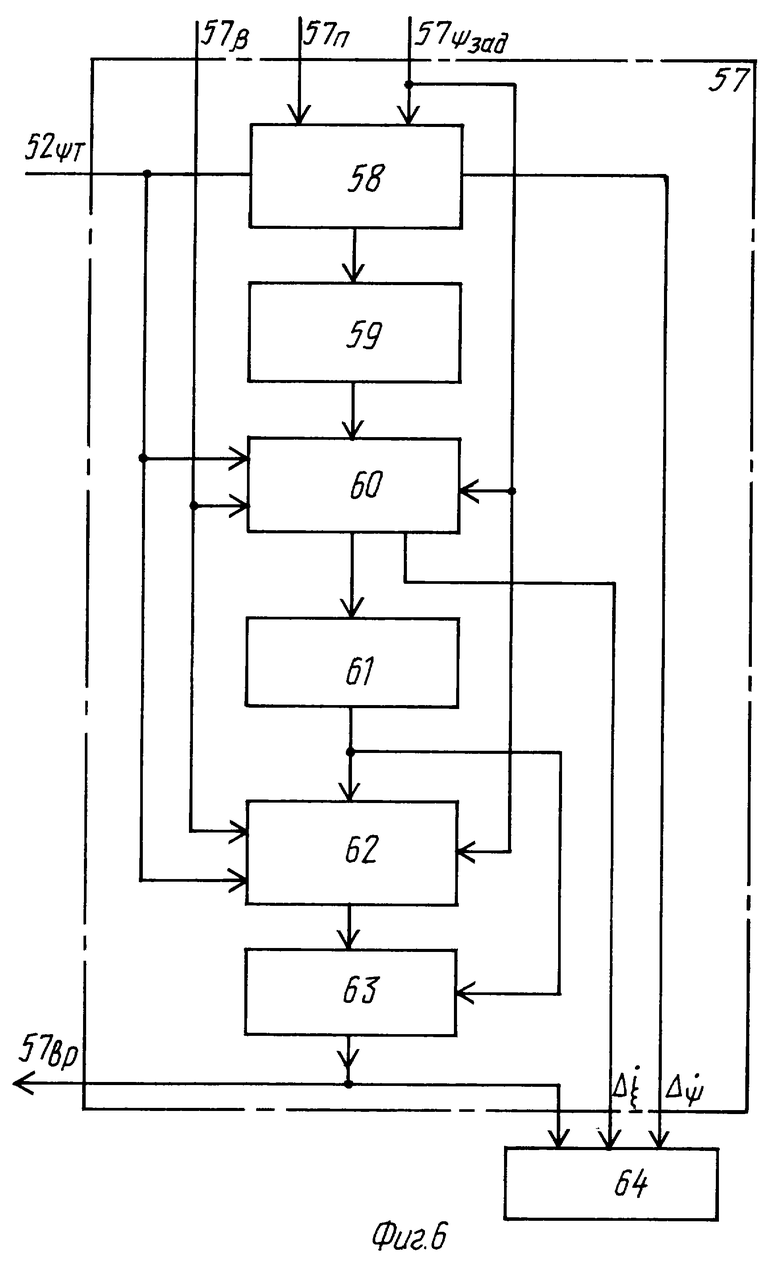
На фиг. 6 представлена блок-схема устройства пилотажно-навигационного комплекса (ПНК) для управления вертолетом в режиме синтезирования апертуры.
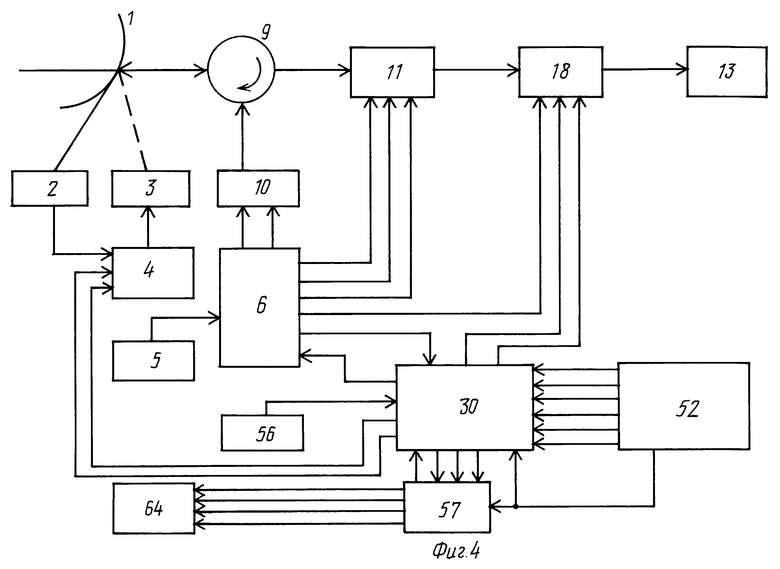
На фиг. 4 представлена укрепленная блок-схема предлагаемой вертолетной радиолокационной станции, где
антенна - 1
датчик углов антенны - 2
двигатель антенны по азимуту - 3
блок управления антенной - 4
задающий генератор - 5
синтезатор частот - синхронизатор - 6
модулятор - 7 входят в передатчик (10)
усилитель - 8
циркулятор - 9
передатчик - 10
приемник - 11
процессор сигналов - 12
индикатор - 13
процессор данных и управления РЛС - 30
инерциональная платформа - 52
измеритель угловой скорости - 56
вычислитель ПНК - 57
исполнительное устройство управления вертолетом - 64
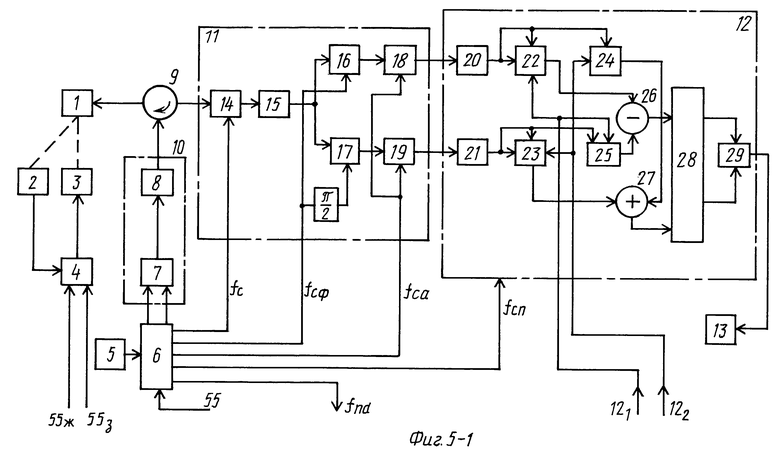
На фиг. 5-1, 5-2 и 5-3 представлена развернутая блок-схема радиолокационной системы в соответствии с настоящим предложением.
антенна - 1
датчик углов - 2
двигатель антенны - 3
блок управления двигателем - 4
задающий генератор - 5
синтезатор частот - синхронизатор - 6
модулятор - 7
усилитель мощности - 8
циркулятор - 9
передатчик - 10
приемник - 11
процессор сигналов - 12
индикатор - 13
СВЧ-приемник - 14
УПЧ - 15
синхронный фазовый детектор - 16, 17
аналого-цифровой преобразователь АЦП - 18, 19
узел памяти - 20, 21
умножитель 22, 23, 24 и 25
узел разности - 26
узел суммы - 27
процессор БПФ - 28
узел модуля - 29
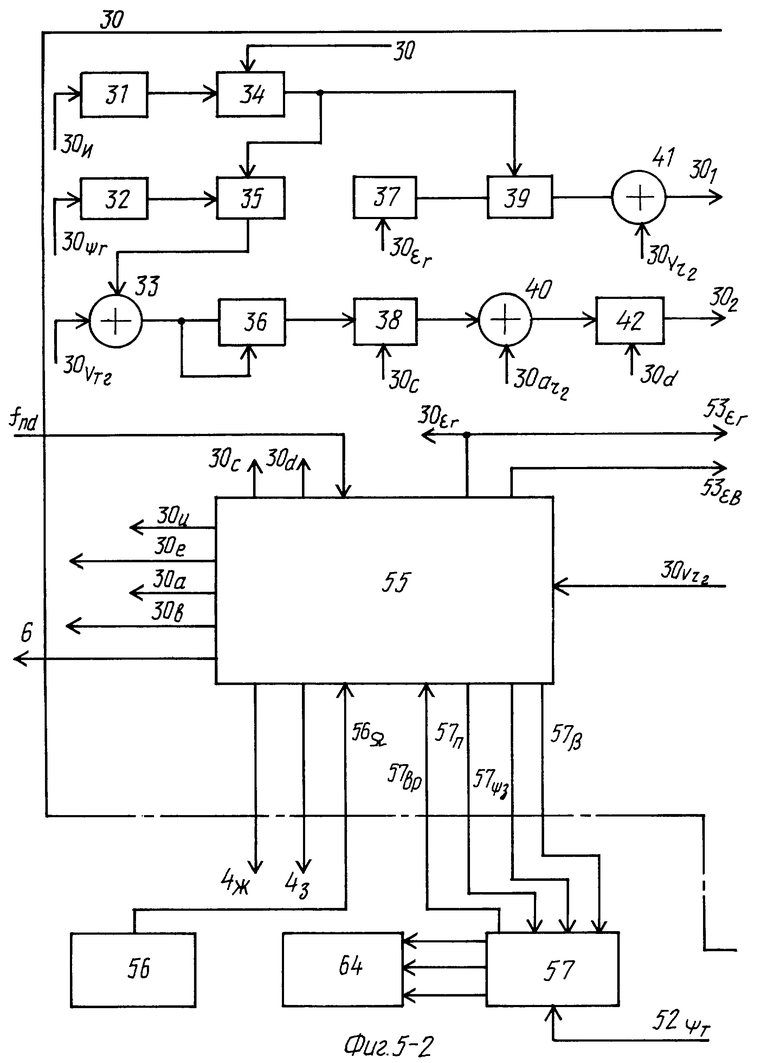
процессор данных и управления РЛС - 30
узел Cos - 31
узел Cos - 32
узел суммы - 33
умножитель - 34, 35 и 36
узел Sin - 37
умножитель - 38, 39
узел суммы - 40
узел суммы - 41
умножитель - 42, 43, 44, 45
узел суммы - 46, 47
узел Cos - 48
узел Sin - 49
узел памяти - 50, 51
инерциальная платформа - 52
вычислитель радиальной и тангенциальной скорости - 53
вычислитель радиального ускорения - 54
вычислитель исходных данных и управления - 55
измеритель угловой скорости - 56
вычислитель (ПНК) - 57
вычислитель - 58
вычислитель - 59
вычислитель - 60
вычислитель - 61
вычислитель - 62
вычислитель - 63
исполнительное устройство - 64
Как было отмечено выше, режим синтезирования апертуры антенны определяется наличием движения летательного аппарата. Поэтому работа БРЛМ в этом режиме должна быть в тесном информационном и временное взаимодействии БРЛС с вертолетом. С этой целью введена линия командно-информационой связи между процессором данных (30) и ПНК (57). При таком взаимодействии предлагаемая БРЛС в режиме синтезирования работает следующим образом. Подготовка к началу работы определяется разовой командой "подготовка", заданным курсом ψзад и углом сектора β вращения вертолета, выдаваемых по линии связи из вычислителя исходных данных и управления (55) БРЛС (линия связи 57п, 57 β , 57 ψзад ) в вычислитель пилотажно-навигационного комплекса (ПНК) вертолета. Одновременно из инерционной платформы в ПНК поступает текущий курс ψтек вертолета (линия связи 52 ψтек ).
По получению команды "Подготовка" из процессора данных (55) начинают работать вычислители "ПНК" (см. фиг. 6).
На основе заданного курса ψзад и текущего курса ψтек в вычислителе сигнала управления (58) вычисляется сигнал рассогласования Δψ между заданным и текущим курсом, формируется директорный сигнал, поступает в исполнительное устройство управления вертолетом (64).
Исполнительное устройство обеспечивает отработку вертолета на заданный курс. Вычислитель признака отработки заданного курса (59) вырабатывает признак отработки по сигналу Δψ = 0. По признаку отработки заданного курса в вычислителе (60) на основе поступающих сигналов ψтек, ψзад и заданного курса сектора вращения β вычисляется сигнал управления Δξ = ψзад+β-ψтек и формируется директорный сигнал, который поступает в исполнительное устройство управления вертолетом (64). По признаку вычисления сигнала управления в вычислителе (61) формируется команда "вращение", которая через вычислитель (63) снятия команды "вращение" поступает на исполнительное устройство (64) и в БРЛС. Исполнительное устройство управления вертолетом по команде "вращение" и директорному сигналу управления из вычислителя (60) задает вращение вертолету в заданном секторе β . По окончании вращения вертолета в заданном секторе β вычислитель (62) вырабатывает признак отработки заданного угла сектора по условию ψзад+β-ψтек= 0. По признаку отработки вычислитель (63) снимает команду "вращение" и этим самым заканчивает цикл режима синтезирования. Таким образом, началом отсчета времени излучения БРЛС и приема отраженных сигналов является момент прихода в БРЛС разовой команды "вращение" из ПНК (57). После снятия в ПНК (57) команды "вращение" излучение и прием отраженных сигналов БРЛС прекращается. Одновременно снимается команда "подготовка" из БРЛС. По окончании вращения формируется радиолокационное изображение на индикаторе (13). Во время вращения вертолета БРЛС работает следующим образом. В процессе движения носовой части вертолета (антенны (1)) усилитель мощности (8) усиливает поступающие на него из модулятора (7) высокочастотные импульсы и через циркулятор (9) передает в антенну (1). Антенной (1) эти импульсы излучают в пространство и распространяются в направлении выбранной области.
При движении носовой части антенны вертолета по дуге с радиусом l для стабилизации положения электрической оси антенны в заданном направлении (перпендикулярной к направлению движения по хорде L) и для управления положением антенны вводится блок управления движением антенны по азимуту (4), на который поступает сигнал с датчика угла (2) азимута αa антенны, сигнал заданного угла αзад положения антенны из процессора данных и управления РЛС (55) (линия 4ж), а также сигнал изменения углового положения строительной оси вертолета при движении носовой части Δβ = Ωt (линия 4з). Изменение угла Δβ″ суммируется со значением заданного угла αзад+Ωt и подается на схему сравнения в блоке (4). В схеме сравнения вырабатывается сигнал ошибки, усиливается в усилителе и подается на двигатель поворота антенны по азимуту. При этом поворот строительной оси в одном направлении вызывает поворот антенны по азимуту в другом, обеспечивая таким образом стабилизацию положения электрической оси в заданном до движения антенны направления (см. фиг. 2).
Когерентность сигнала определяется задающим высокостабильным по частоте кварцевым генератором (5). Модулятор (7) осуществляет модуляцию высокочастотного сигнала f и формирует импульсы, подаваемые в усилитель мощности, имеющие заданную длительность (τи) и период повторения (Tп), определяемый однозначной дальностью.
Высокочастотный сигнал (f) и синхронизирующие импульсы формируются синтезатором частоты - синхронизатором (6), разработанным известными методами проектирования и изготовленным с использованием известной элементной базы.
От задающего генератора (5) входная частота fг поступает в синтезатор частот - синхронизатор (4), умножается до более высокой частоты f и используется в качестве несущей частоты радиолокационного сигнала, излучаемого антенной. Кроме того, путем деления частоты fг формируются синхронизирующий и запускающие импульсы. Также в процессе движения отраженные сигналы от поверхности объектов принимаются антенной и через циркулятор (9) поступают в приемник (11). В СВЧ-приемнике (14) этот сигнал в смесителе приемника смешивается с сигналом синтезатора fс, в результате чего образуется сигнал промежуточной частоты fпр. Сигнал промежуточной частоты в усилителе промежуточной частоты УПЧ (15) усиливается и поступает на синхронные фазовые детекторы (16) и (17), на которые от синтезатора поступает сигнал с частотой fсф, равной промежуточной частоте fпр. Причем на один из фазовых детекторов сигнала синтезатора fсф поступает со сдвигом на π/2.
За счет движения антенны (1) на выходах фазовых детекторов образуются синфазный "I" и квадратный "Q" сигналы доплеровской частоты. Далее, оба сигнала "I" и "Q" с помощью аналого-цифрового преобразователя (18) и (19), управляемого с помощью синхросигнала fсс, преобразуются в цифровую форму. С выходов АЦП (18) и (19) массив сигналов двух квадратур, поступающих в процессор сигналов (12), синхронизируемый сигналом fсп из блока (6), накапливается в памяти (20) и (21) для каждого элемента дальности и каждого периода повторения.
Одновременно в процессоре данных и управления БРЛС (30) синхронизируемым сигналом fпd из блока (6) формируется опорная функция, комплексно сопряженная с сигналом, отраженным от объекта (весовая функция H(t) = 1) в соответствии с формулой [8].
Для этого формируется линейный член изменения фазы Δϕл опорной функции и ее квадратичный член Δϕкв (см. формулу 8).
Для формирования линейного члена из вычислителя данных и управления (55) на узел Cos (31) поступает значение угла  (линия 30и). В вычислителе данных (55) значение угла
(линия 30и). В вычислителе данных (55) значение угла  формируется на основе измеренного значения угловой скорости Ωу измерителем угловой скорости (56) (линия 56 Ω ) заданного угла сектора β и времени t, вычисляемого таймером вычислителя с момента прихода команды "вращение" из ПНК (57) (линия 57вр). Вычисленное значение
формируется на основе измеренного значения угловой скорости Ωу измерителем угловой скорости (56) (линия 56 Ω ) заданного угла сектора β и времени t, вычисляемого таймером вычислителя с момента прихода команды "вращение" из ПНК (57) (линия 57вр). Вычисленное значение  в узле (31) поступает на умножитель (34). На этот же умножитель поступает значение линейной скорости Ωу•l (линия 30е) (см. фиг. 2). Произведение
в узле (31) поступает на умножитель (34). На этот же умножитель поступает значение линейной скорости Ωу•l (линия 30е) (см. фиг. 2). Произведение  поступает на умножитель (39), где умножается на значение sinεr, поступающее из узла (37) и формируемое на основе значения заданного угла направления на объект εr выдаваемого из вычислителя данных 55 (линия 30
поступает на умножитель (39), где умножается на значение sinεr, поступающее из узла (37) и формируемое на основе значения заданного угла направления на объект εr выдаваемого из вычислителя данных 55 (линия 30  ). Произведение
). Произведение  (радиальная составляющая скорости Vr1 на объект) поступает на сумматор (41), где суммируется с радиальной составляющей Vr2 , поступающей из вычислителя (53) при движении вертолета. С сумматора (41) скорость Vr поступает на умножитель (43), где умножается на величину
(радиальная составляющая скорости Vr1 на объект) поступает на сумматор (41), где суммируется с радиальной составляющей Vr2 , поступающей из вычислителя (53) при движении вертолета. С сумматора (41) скорость Vr поступает на умножитель (43), где умножается на величину  поступающую из вычислителя данных (55) (линия 30a). В результате на выходе умножителя (43) формируется конкретное значение изменения фазы для каждого элемента n дальности в периоде повторения
поступающую из вычислителя данных (55) (линия 30a). В результате на выходе умножителя (43) формируется конкретное значение изменения фазы для каждого элемента n дальности в периоде повторения  В умножителе (44) формируется изменение фазы от периода к периоду Tп для всех элементов дальности. Для этого из сумматора (41) значение V2 поступает в умножитель (44) и умножается на коэффициент
В умножителе (44) формируется изменение фазы от периода к периоду Tп для всех элементов дальности. Для этого из сумматора (41) значение V2 поступает в умножитель (44) и умножается на коэффициент  (где "K" - номер периода повторения "Tп") (линия 30b). В результате на выходе умножителя (44) будет
(где "K" - номер периода повторения "Tп") (линия 30b). В результате на выходе умножителя (44) будет 
В узле суммы (46) формируется линейный член изменения фазы  . Для каждого элемента дальности n и K-ого периода повторения
. Для каждого элемента дальности n и K-ого периода повторения
Для формирования квадратичного члена изменения фазы  опорной функции используются умножители 34, 35 и 36. Линейная скорость Ωу•l поступает из вычислителя данных (55) на умножитель (34), где умножается на значение
опорной функции используются умножители 34, 35 и 36. Линейная скорость Ωу•l поступает из вычислителя данных (55) на умножитель (34), где умножается на значение  формируемое в узле (31) на основе поступающего из вычислителя данных (55) значения узла
формируемое в узле (31) на основе поступающего из вычислителя данных (55) значения узла  Полученное произведение
Полученное произведение  поступает на умножитель (35), где умножается на cosεr, величина которого формируется в узле (32), на вход которого поступает значение εr из вычислителя данных (55). В результате формируется значение тангенциальной составляющей
поступает на умножитель (35), где умножается на cosεr, величина которого формируется в узле (32), на вход которого поступает значение εr из вычислителя данных (55). В результате формируется значение тангенциальной составляющей  Вычисленное значение тангенциальной составляющей скорости Vт поступает на сумматор (33), где суммируется с тангенциальной составляющей скорости Vt2 , приходящей из вычислителя (53) (линия 30 Vt2 ) при поступательном движении вертолета. С выхода сумматора тангенциальная составляющая Vт в умножителе (36) умножается сама на себя. Значение Vт 2 в умножителе (38) умножается на величину C = 1/Rн, выдаваемую из вычислителя исходных данных (линия 30c). Величина ar1 = V2/Rн поступает на сумматор (48), где суммируется с величиной ускорения ar2 , поступающей из (линия 30ar2 ) вычислителя радиального ускорения (54). Суммарное радиальное ускорение ar поступает на умножитель (42), где умножается на значение (k • Tп)2, поступающее из вычислителя исходных данных (линия 30d). Затем величина ar • (k • T'п)2 поступает на умножитель (45), где умножается на величину
Вычисленное значение тангенциальной составляющей скорости Vт поступает на сумматор (33), где суммируется с тангенциальной составляющей скорости Vt2 , приходящей из вычислителя (53) (линия 30 Vt2 ) при поступательном движении вертолета. С выхода сумматора тангенциальная составляющая Vт в умножителе (36) умножается сама на себя. Значение Vт 2 в умножителе (38) умножается на величину C = 1/Rн, выдаваемую из вычислителя исходных данных (линия 30c). Величина ar1 = V2/Rн поступает на сумматор (48), где суммируется с величиной ускорения ar2 , поступающей из (линия 30ar2 ) вычислителя радиального ускорения (54). Суммарное радиальное ускорение ar поступает на умножитель (42), где умножается на значение (k • Tп)2, поступающее из вычислителя исходных данных (линия 30d). Затем величина ar • (k • T'п)2 поступает на умножитель (45), где умножается на величину  поступающую из вычислителя исходных данных (линия 30m). Результатом умножения является квадратичный член опорной функции
поступающую из вычислителя исходных данных (линия 30m). Результатом умножения является квадратичный член опорной функции  который поступает на узел суммы (47), где суммируется с линейным членом для каждого элемента дальности n в каждом периоде повторения Tп.
который поступает на узел суммы (47), где суммируется с линейным членом для каждого элемента дальности n в каждом периоде повторения Tп.
С выхода узла суммы изменения фазы опорной функции Δϕ = Δϕл≠ Δϕкв для каждого элемента дальности в каждом периоде повторения Tп поступают в узлы sinΔϕ и cosΔϕ (48 и 49), а затем накапливаются в памяти (50, 51) для каждого элемента дальности и каждого периода повторения. По окончании движения вертолета (антенны) в заданном секторе β поступающие из памяти (20 и 21) отсчеты сигнала каждого элемента дальности каждого периода повторения в умножителях (22, 23, 24 и 25) перемножаются с одноименными отсчетами каждого элемента дальности и периода повторения опорной функции, поступающие из памяти (50) и (51) (линия 12, и 12r). С выходов узлов разности (26) и суммы (27) сигналы двух квадратур подаются в процессор БПФ (28), где подвергаются гармоническому анализу по алгоритму быстрого преобразования Фурье.
Результатом преобразования сигналов из временной области в частотную являются частотные (азимутальные) отсчеты двух квадратур радиолокационной информации в каждом элементе дальности. Затем отсчеты двух квадратур поступают на узел 29, где из них формируется модуль. Далее сигналы поступают в систему индикации 13.
Работая БРЛС в общем случае (когда вертолет движется) аналогично описанному за исключением того, что для компенсации фазовых изменений, связанных с движением вертолета, используются вычисленные значения радиальной Vr2 и тангенциальной Vt2 составляющих скоростей, а также ускорений ar2 на основе измерения параметров движения антенны.
С этой целью применяются инерциальная платформа, а также вычислитель радиальной и тангенциальной скорости (53) и вычислитель радиального ускорения (54). Вычисление составляющих скоростей и ускорения проводятся на основе измеренных инерциальной платформой в координатах X, Y, Z составляющих скорости Vx, Vy, Vz, составляющих ускорений ax, ay, az, текущего курса ψтек, а также углов направления на объект относительно оси X и плоскости OXZ εr и εв соответственно.
Вычисления составляющих скорости в вычислителе (53) проводятся по приведенным выше формулам (9 и 10).
Вычисления составляющей ускорения в вычислителе (54) проводятся по формулам (8 и 11).
Вычисленные значения скоростей Vr2 и Vt2 поступают на сумматоры 41 и 33 соответственно. Составляющая радиального ускорения ar2 поступает на сумматор 48.
Для исключения влияния движения вертолета на процесс суммирования сигналов в вычислитель исходных данных и управления РЛС (55) вводится режим компенсации положения гребенки стробов АЦП (18 и 19) по дальности во время приема отраженных сигналов за все время синтезирования. С этой целью в вычислителе данных (55) вычисляется изменение дальности "ΔR″", связанное с движением вертолета. Для этого из вычислителя радиальной составляющей скорости (53) в вычислитель исходных данных (55) поступает радиальная составляющая скорости Vr2 (линия 30 Vr2 ), где вычисляется изменение дальности 
Величина ΔR поступает из вычислителя (55) в синтезатор частот - синхронизатор (6) (линия 6), где формируется изменение задержки (опережения) ΔT синхронизирующих импульсов fса, выдаваемых в узле АЦП (18 и 19).
Техническая эффективность
Технический эффект предлагаемого изобретения заключается в повышении углового азимутального разрешения радиолокационной системы.
Повышение углового разрешения предлагаемой РЛС по сравнению с прототипом будет определяться тем, настолько размер траектории движения антенны будет больше апертуры реальной антенны и может оцениваться коэффициентом обужения углового размера диаграммы реальной антенны
где θ и θc - угловое разрешение БРЛС;
L - линейный размер апертуры.
Если ориентироваться на определенный тип вертолета, в котором размер радиуса вращения l равен 4,5 метра, то при вращении в секторе 70o траектория движения антенны будет составлять L = 5 метров.
Для этого варианта, при апертуре реальной антенны Lпр = 0,8 метра т
т
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
| СПОСОБ УГЛОВОГО РАЗРЕШЕНИЯ ЦЕЛИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ ПРИ ОБЗОРЕ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ БОКОВОГО ОБЗОРА | 2000 |
|
RU2182714C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2012 |
|
RU2510685C2 |
| ВЕРТОЛЕТНАЯ ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2191401C1 |
| СПОСОБ РАЗРЕШЕНИЯ ЦЕЛЕЙ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СЖАТИЕМ ИМПУЛЬСОВ И ВОССТАНОВЛЕНИЕМ СИГНАЛОВ | 2004 |
|
RU2296345C2 |
Изобретение относится к радиолокационных системам, предназначенным для использования в качестве вертолетной или самолетной РЛС для обзора земной и водной поверхности и обнаружения на ней объектов, в том числе и малоразмерных. Технический результат заключается в получении высокого углового разрешения РЛС в азимутальной плоскости путем синтезирования апертуры антенны как в режиме зависания вертолета, так и при движении в направлении его вектора скорости и достигается тем, что установленной в носовой части вертолета антенне PЛC за счет вращения корпуса вертолета вокруг оси в заданном угловом секторе придается движение в горизонтальной плоскости, при этом ее электрическая ось устанавливается перпендикулярно (или под углом) к направлению движения. При движении антенны проводятся излучение, прием и когерентное суммирование отраженных сигналов в каждом элементе дальности. В результате когерентного суммирования создается искусственный (синтезированный) раскрыв антенны, существенно превышающий раскрыв реальной антенны, обеспечивающий высокое угловое разрешение в азимутальной плоскости. Возможность когерентного суммирования принятых сигналов обеспечивается путем компенсации фазовых изменений принимаемого сигнала. 8 ил.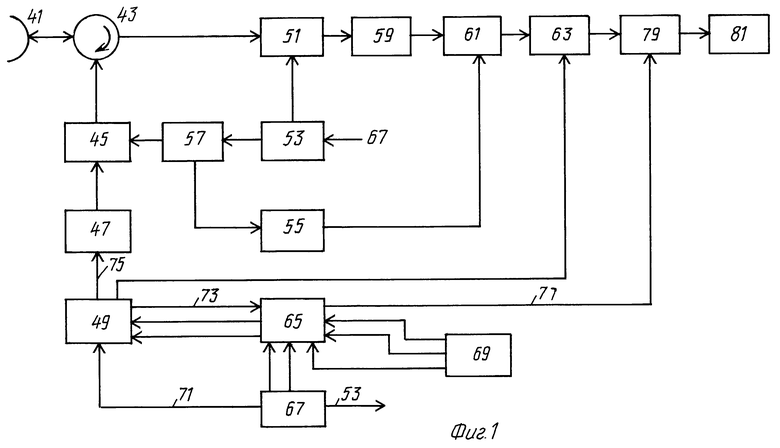
Вертолетная радиолокационная система, состоящая из антенны, передатчика, циркулятора, приемника, процессора сигналов, процессора данных и управления, инерциальной платформы, при этом вход-выход антенны через циркулятор соединен со входом приемника и выходом передатчика, выход приемника соединен со входом процессора сигналов, выход процессора сигналов соединен со входом индикатора, второй и третий выходы процессора данных и управления соединены со вторым и третьим входами процессора сигналов, второй, третий, четвертый, пятый, шестой и седьмой и восьмой входы соединены с первым, вторым, третьим, четвертым, пятым, шестым и седьмым выходами инерциальной платформы, отличающаяся тем, что в нее введены вычислитель пилотажно-навигационного комплекса (ВПНК), командно-информационная линия связи между БРЛС и ВПНК и исполнительное устройство управления вертолетом, а также тем, что введены измеритель угловой скорости, датчик углов антенны, двигатель и блок управления антенной, задающий генератор и синтезатор частот - синхронизатор, при этом первый, второй и третий входы ВПНК соединены с третьим, четвертым и пятым выходами процессора данных и управления, четвертый вход ВПНК соединен с седьмым выходом инерциальной платформы, первый выход ВПНК соединен с девятым входом процессора данных, второй, третий и четвертый выходы ВПНК соединены с первым, вторым и третьим входами исполнительного устройства управления вертолетом, шестой и седьмой выходы процессора данных соединены с первым и вторым входами блока управления антенной, десятый вход процессора данных соединен с выходом измерителя угловой скорости, восьмой выход процессора соединен со вторым входом синтезатора частот - дискриминатора, а первый вход процессора данных соединен с седьмым выходом синтезатора частот, первый и второй выходы синтезатора частот соединены с первым и вторым входами передатчика, третий, четвертый и пятый выходы соединены с первым, вторым и третьим входами приемника, шестой выход соединен с первым входом процессора сигналов, первый вход соединен с выходом задающего генератора, третий вход блока управления соединен с выходом датчика углов, а выход соединен со входом двигателя.
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1992 |
|
RU2012014C1 |
| US 3896439 A1, 22.07.1975 | |||
| ГЕРБИЦИДНАЯ КОМПОЗИЦИЯ И СПОСОБ БОРЬБЫ С СОРНЫМИ РАСТЕНИЯМИ В ПОСЕВАХ КУЛЬТУРНЫХ РАСТЕНИЙ | 2011 |
|
RU2488999C2 |
| DE 3346155 A1, 18.12.1985. | |||

