ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области рекуперации и сохранения энергии торможения транспортной машины, а также к устройствам для осуществления указанной технологии.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Известен способ и устройство рекуперации энергии торможения «стоп-старт», разработанный фирмой «Фольксваген» (Патент [1] ФРГ №3825179, кл. F03G/08, статья Гулиа Н.В. и др. «Пуск двигателя «ИР», №6, - 1989, с.19). Известный способ рекуперации кинетической энергии торможения автомобиля, заключающийся в накоплении энергии автомобиля перед его остановкой в маховике, размещенном между двигателем и ходовой частью автомобиля, для использования этой энергии при последующем движении автомобиля, отличается тем, что позволяет производить полное отключение двигателя (ДВС) в режиме торможения. Согласно известному способу между двигателем и коробкой передач последовательно располагают маховик и главное и дополнительное сцепления, образующие механизм с числом степеней свободы, равным единице. Известный способ позволяет при торможении машины, производя отключение обоих сцеплений, выключить двигатель (ДВС) и сохранить начальную скорость вращения маховика равной скорости двигателя (ДВС) перед торможением машины и тем самым сохранить в нем не всю кинетическую энергию трансмиссии, а только часть накопленной ранее кинетической энергии, и в дальнейшем использовать ее для запуска двигателя (ДВС) и разгона машины.
К недостаткам известного способа «стоп-старт» относятся следующие:
- рекуперируется только часть кинетической энергии, которая находится в маховике перед торможением, и теряется значительная часть энергии, запасенная в трансмиссии;
- рекуперация энергии производится при остановке ДВС, что не всегда необходимо при остановке машины, тратится дополнительная энергия на запуск остановленного ДВС;
- динамические показатели машины значительно не улучшаются, так как энергия маховика расходуется на запуск ДВС, а не на разгон машины.
Значительное повышение экономичности транспортной машины возможно при снижении потерь кинетической энергии при торможении, в идеале это достижимо путем сохранения постоянного значения кинетической энергии трансмиссии машины и маховика, что в свою очередь возможно только при автоматическом измерении текущей скорости трансмиссии машины и автоматическом воздействии ее на скорость вращения маховика. Для этого в систему управления кинетической энергии должен быть включен вариатор с плавным управляющим воздействием на передаточное отношение между трансмиссией машины и маховиком. Теоретические основы способа сохранения постоянного значения кинетической энергии трансмиссии и маховика изложены в статье [2]. Сохранение постоянного значения кинетической энергии трансмиссии машины и маховика в известном способе и известном устройстве невозможно.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание такого способа и устройства его реализации, которые обеспечили бы повышение эффективности и полной рекуперации энергии торможения путем сохранения постоянного значения кинетической энергии и обеспечения автоматической работы на любых режимах движения машины. Поставленная цель достигается тем, что обмен кинетической энергии между маховиком и трансмиссией машины осуществляют плавным изменением передаточного отношения планетарного дифференциала с двумя степенями свободы, который соединяет трансмиссию и маховик.
Известен способ управления механизма рекуперации энергии торможения, позволяющий в цикле движения транспортной машины обеспечивать частичное сохранение накопленной кинетической энергии в маховике при полном отключении двигателя (ДВС) на холостом ходу и в режиме торможения, заключающийся в том, что непосредственный обмен кинетической энергии между маховиком и трансмиссией машины реализуется механизмом с постоянным передаточным отношением с числом степеней свободы, равным единице, который последовательно соединяет трансмиссию машины, коробку передач, дополнительное сцепление, маховик, главное сцепление и ДВС; причем, при торможении машины производят выключение ДВС с одновременным выключением обоих сцеплений, чем и сохраняют начальную скорость вращения маховика, равную скорости вращения ДВС перед торможением, и, тем самым, сохраняют в маховике часть накопленной кинетической энергии; причем, накопленная кинетическая энергия в маховике обеспечивает запуск и разгон ДВС.
Заявляемый способ отличается тем, что в транспортной машине обеспечивается постоянное суммарное значение кинетической энергии маховика и трансмиссии и тем, что обмен кинетической энергии между маховиком и трансмиссией машины реализуется механическим путем автоматического изменения скорости вращения маховика таким образом, что увеличение модуля скорости вращения вала трансмиссии сопровождается снижением модуля скорости вращения вала маховика и наоборот снижение модуля скорости вращения вала трансмиссии сопровождается увеличением модуля скорости вращения вала маховика за счет изменения передаточного отношения планетарного дифференциала, который имеет две степени подвижности и который механически соединен с трансмиссией машины и с маховиком, а через дополнительное сцепление соединен с двигателем параллельно коробке передач, которая непосредственно соединена как с трансмиссией, так и через главное сцепление с двигателем.
Существенные признаки заявляемого способа, которые совпадают с признаками аналога, заключаются в том, что при торможении транспортной машины запасается кинетическая энергия в маховике, но заявляемый способ позволяет рекуперировать всю кинетическую энергию транспортной машины, а известный способ позволяет сохранить только часть энергии, заключенной в трансмиссии между двумя сцеплениями, что на порядок ниже накопленной кинетической энергии машины.
Существенные отличия заявляемого способа состоят в том, что предлагаемый способ не требует остановки двигателя (ДВС) при торможении и его нового запуска, а осуществляется непрерывно автоматически за счет соответствующего расчета параметров зубчатых механизмов при проектировании.
Предлагаемый способ дополнительно отличен тем, что изменение передаточного отношения планетарного дифференциала между трансмиссией машины и маховиком осуществляется автоматически при изменении скорости вращения трансмиссии и двигателя таким образом, что увеличение модуля скорости вращения трансмиссии и двигателя приводит к снижению модуля скорости вращения маховика за счет того, что число степеней свободы планетарного дифференциала равно двум, а скорости вращения вала планетарного дифференциала, соединенного с маховиком, обеспечивается направление, противоположное скорости вращения вала планетарного дифференциала, соединенного с трансмиссией и двигателем, которым обеспечиваются расчетом чисел зубьев колес одинаковые направления вращения. Теоретические основы предлагаемого способа и результаты экспериментального исследования приведены в работе [2].
Отличие предлагаемого способа управления механизма рекуперации энергии торможения транспортной машины заключается в том, что изменение передаточного отношения планетарного дифференциала между трансмиссией машины и маховиком осуществляется автоматически при изменении скорости вращения трансмиссии таким образом, что снижение модуля скорости вращения маховика приводит к увеличению модуля скорости вращения трансмиссии, за счет того, что число степеней свободы планетарного дифференциала равно двум, а скорости вращения вала планетарного дифференциала, соединенного с маховиком, обеспечивается направление, противоположное скорости вращения вала планетарного дифференциала, соединенного с трансмиссией; причем, валам планетарного дифференциала, соединенного с трансмиссией и с двигателем, обеспечиваются расчетом чисел зубьев колес одинаковые направления скорости вращения.
Основное отличие предлагаемого способа заключается в том, что в транспортной машине обеспечивается постоянное суммарное значение кинетической энергии маховика и трансмиссии тем, что обмен кинетической энергии между маховиком и трансмиссией машины реализуется механическим путем автоматического изменения скорости вращения маховика таким образом, что увеличение модуля скорости вращения вала трансмиссии сопровождается снижением модуля скорости вращения вала маховика и, наоборот, снижение модуля скорости вращения вала трансмиссии сопровождается увеличением модуля скорости вращения вала маховика за счет изменения передаточного отношения планетарного дифференциала, который имеет две степени подвижности и который механически соединен с трансмиссией машины и с маховиком, а через дополнительное сцепление соединен с двигателем параллельно коробке передач, которая непосредственно соединена как с трансмиссией, так и через главное сцепление соединена с двигателем. Предлагаемый способ отличается тем, что в качестве двигателя может быть использован электрический двигатель или ДВС.
Дополнительное отличие предлагаемого способа заключается в том, что изменение передаточного отношения планетарного дифференциала между трансмиссией машины и маховиком осуществляется при изменении скорости вращения трансмиссии таким образом, что снижение модуля скорости вращения маховика приводит к увеличению модуля скорости вращения трансмиссии, за счет того, что степень подвижности планетарного дифференциала равна двум, а скорости вращения вала планетарного дифференциала, соединенного с маховиком, обеспечивается направление, противоположное скорости вращения вала планетарного дифференциала, соединенного с трансмиссией; причем, валам планетарного дифференциала, соединенного с трансмиссией и с двигателем, расчетом чисел зубьев колес обеспечиваются одинаковые направления скорости вращения.
Известное устройство для осуществления способа управления механизма рекуперации энергии торможения включает неподвижный корпус, маховик, двигатель (ДВС), коробку передач с механизмами управления; причем, коробка передач и двигатель (ДВС) соединены главным и вспомогательным сцеплениями; трансмиссия механически соединена с коробкой передач, имеющей в своем составе зубчатые передачи с неподвижными осями и планетарную передачу, в состав которых входят центральные колеса с внешними и внутренними зубьями и водило с сателлитами.
Предлагаемое устройство для осуществления способа управления механизма рекуперации энергии торможения отличается тем, что оно дополнительно снабжено дополнительным сцеплением и планетарным дифференциалом с двумя степенями свободы, состоящим из звеньев: центральных колес с внешними и внутренними зубьями, расположенного на водиле с возможностью вращения сателлита, которые зацепляются между собой; причем, планетарный дифференциал соединен с трансмиссией и с двигателем параллельно с механизмами коробки передач. Теоретические основы принципов работы планетарных дифференциалов с двумя степенями свободы приведены в работе [3], в предлагаемом устройстве используется ранее не описанное свойство планетарных дифференциалов при некоторых расчетных параметрах, когда при увеличении скоростей вращения одних его звеньев происходит снижение модуля скорости звена, имеющего противоположное направление вращения.
Существенные признаки заявляемого устройства, которые совпадают с признаками аналога, заключаются в том, что оно соединено с коробкой передач, а также в том, что оба имеют маховик, но способ и места соединения с трансмиссией различны.
Существенные отличия заявляемого устройства состоят в том, что оно снабжено дополнительным сцеплением и планетарным дифференциалом с двумя степенями свободы, состоящим из звеньев: центральных колес с внешними и внутренними зубьями, расположенного на водиле с возможностью вращения сателлита, которые зацепляются между собой; причем, планетарный дифференциал соединен с трансмиссией и с двигателем параллельно с механизмами коробки передач, а также тем, что места соединения маховика с трансмиссией различны.
Заявляемое устройство дополнительно отличается тем, что дополнительно снабжено зубчатой передачей с неподвижными осями и с муфтой свободного хода с самотормозящими элементами, допускающими вращение маховика в одну сторону, расположенной между маховиком и планетарным дифференциалом, а также тем, что образует в неподвижном корпусе отдельный дополнительный блок рекуперации, состоящий из маховика, зубчатой передачи с неподвижными осями, планетарного дифференциала, муфты свободного хода и дополнительного сцепления.
Заявляемое устройство отличается еще и тем, что входит в состав автоматической коробки передач, маховик механически соединен зубчатой передачей с неподвижными осями с одним из центральных колес планетарного дифференциала, другое центральное колесо дополнительным сцеплением механически соединено с валом двигателя (ДВС), а водило механически соединено с трансмиссией, а также тем, что маховик механически соединен с одним из центральных колес планетарного дифференциала, другое центральное колесо механически соединено с трансмиссией, а водило дополнительным сцеплением соединено с валом двигателя (ДВС).
Отличие заявляемого устройства от известного заключается в подсоединении маховика к дифференциалу и в подсоединении маховика не последовательно, а параллельно коробке передач с помощью главного и дополнительного сцеплений, что позволяет использовать его как регулятор прямого действия для измерения текущей скорости вращения трансмиссии и скорости двигателя (ДВС), так и для прямого воздействия на скорость вращения маховика.
Предлагаемое устройство существенно отличается от известного тем, что снабжено дополнительным маховиком, дополнительным сцеплением, зубчатой передачей с неподвижными осями и планетарным дифференциалом с двумя степенями свободы W=2, состоящим из центральных колес с внешними и внутренними зубьями, расположенного на водиле с возможностью вращения сателлита, которые зацепляются между собой. Предлагаемый планетарный дифференциал с двумя степенями свободы W=2 образует механический регулятор прямого действия, работающий по принципу Понселе [4].
Дополнительное отличие заключается в том, что предлагаемое устройство дополнительно снабжено муфтой свободного хода [3] с самотормозящими элементами, допускающими вращение маховика в одну сторону, расположенной между маховиком и центральным колесом планетарного дифференциала; причем, устройство образует в неподвижном корпусе отдельный дополнительный блок рекуперации, состоящий из маховика, зубчатой передачи с неподвижными осями, планетарного дифференциала, муфты свободного хода и дополнительного сцепления; причем, блок рекуперации подсоединен параллельно автоматической коробке передач, маховик механически соединен зубчатой передачей с неподвижными осями с одним из центральных колес планетарного дифференциала, другое центральное колесо дополнительным сцеплением механически соединено с валом двигателя (ДВС), а водило механически соединено с трансмиссией. Причем, в качестве двигателя может быть использован ДВС или электрический двигатель.
При сравнении свойств заявляемого и известного решений было установлено, что у заявляемого решения появляются свойства, не совпадающие со свойствами известных решений, и что заявляемое решение обладает существенными отличиями.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Техническая возможность реализации предлагаемого способа иллюстрируется с помощью фиг.1 и фиг.2.
На фиг.1 показана структурная схема однорядного планетарного дифференциала, который используется в предлагаемом устройстве, с двумя степенями подвижности, состоящего из двух центральных зубчатых колес 1 и 3, зацепляющихся с сателлитом 2, который расположен на водиле 4. Схема общеизвестна [3], но обладает при некоторых условиях ранее не описанным свойством увеличения модуля скорости вращения зубчатого колеса 3 при снижении скоростей водила и зубчатого колеса 1. На фиг.1 также показан план скоростей водила 4 и колес 1 и 3, подтверждающий свойство автоматического увеличения модуля скорости колеса 3 при снижении скоростей водила 4 и зубчатого колеса 1.
На фиг.2 показана структурная схема двухрядного планетарного дифференциала с двумя степенями подвижности, состоящего из двух центральных зубчатых колес 1 и 3, зацепляющихся с блоком сателлитов 2, который расположен на водиле 4. Схема общеизвестна [3], но также обладает ранее не описанным свойством увеличения модуля скорости вращения зубчатого колеса 3 при снижении скоростей водила 4 и зубчатого колеса 1. На фиг.2 также показан план скоростей водила 4 и колес 1 и 3, подтверждающий свойство автоматического увеличения модуля скорости колеса 3 при снижении скоростей водила 4 и зубчатого колеса 1.
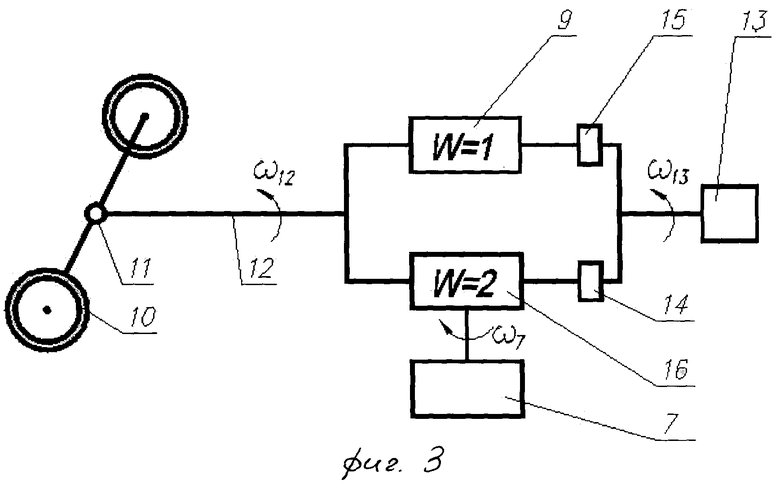
На фиг.3 представлена схема устройства рекуперации энергии торможения для осуществления предлагаемого способа (управления механизма рекуперации энергии торможения) с помощью планетарного дифференциала, где: 1, 3 - центральные зубчатые колеса; 2 - сателлит; 4 - водило; 5 - корпус; 6 - коробка передач; 7 - маховик; 8, 9 - зубчатые колеса (с неподвижной осью); 10 - ведущие колеса; 11 - главная передача; 12 - трансмиссия; 13 - двигатель (ДВС); 14 - дополнительное сцепление; 15 - главное сцепление; 16 - планетарный дифференциал.
На фиг.4 показана кинематическая схема устройства рекуперации энергии торможения с двухрядным планетарным дифференциалом;
на фиг.5 - диграмма отношений мощности и скоростей вращения управления планетарным дифференциалом.
Соединяя маховик 7 с помощью дополнительного сцепления 14 с одним из центральных колес 1, 3 или с водилом 4 и соединяя остальные звенья планетарного дифференциала 16 двумя степенями подвижности W=2 с трансмиссией 12 транспортной машины и двигателем 13 любого типа, например с электрическим двигателем или ДВС, т.е. подсоединяя два звена дополнительного планетарного дифференциала 16 к входному и выходному валам коробки передач 6 с одной степенью подвижности W=1, получается автоматическое механическое устройство, работающее по предлагаемому способу управления механизма рекуперации энергии торможения по принципу Понселе [4].
Структурная схема, представленная на фиг.3, может быть реализована с дифференциалом любого типа, т.е. она может быть оснащена маховиком 7 с приводом от однорядного планетарного дифференциала 16 с двумя степенями подвижности, показанного на фиг.1. Схема общеизвестна и состоит из двух центральных зубчатых колес 1 и 3, зацепляющихся с сателлитом 2, который расположен на водиле 4. Маховик 7 соединен с центральным колесом 3 зубчатой передачей с неподвижными осями, водило 4 планетарного дифференциала 16 соединено с трансмиссией 12 транспортной машины, центральное колесо 1 соединено дополнительным сцеплением 14 с двигателем любого типа, например с ДВС 13, т.е. подсоединяя два звена дополнительного дифференциала 16 к входному и выходному валам коробки передач 6 с одной степенью подвижности, получается автоматическое механическое устройство (фиг.3), работающее по предлагаемому способу управления механизма рекуперации энергии торможения.
Структурная схема, представленная на фиг.3, может быть реализована с двухрядным планетарным дифференциалом [3] и показана на фиг.4. Маховик 7 с приводом имеет привод от двухрядного планетарного дифференциала 16 с двумя степенями подвижности. Схема общеизвестна и состоит из двух центральных зубчатых колес 1 и 3, зацепляющихся с сателлитом 2, который расположен на водиле 4. Маховик 7 соединен с центральным колесом 3, водило 4 планетарного дифференциала 16 соединено дополнительным сцеплением 14 с двигателем любого типа, например с ДВС 13, центральное колесо 1 соединено с трансмиссией 12 транспортной машины, т.е. подсоединяя два звена дополнительного дифференциала 16 к входному и выходному валам коробки передач 6 с одной степенью подвижности, получается автоматическое механическое устройство (фиг.3), работающее по предлагаемому способу управления механизма рекуперации энергии торможения.
Работа устройства
Изменение передаточного отношения планетарного (фиг.3 и фиг.4) дифференциала 16 между маховиком 7 и трансмиссией 12 происходит автоматически, если меняется скорость вращения трансмиссии или двигателя согласно планам скоростей на фиг.1 и фиг.2. Скорости звеньев планетарного дифференциала на фиг.1 и фиг.2 пропорциональны тангенсам угла наклона лучей законов распределения скоростей звеньев планетарного дифференциала, которые исходят из начала координат и пересекаются между собой в полюсах зацепления P1 и P2. Например, если скорость VO2 точки О2 водила 4, соединенного с двигателем (фиг.4), увеличивается при неизменной скорости трансмиссии 12, связанной с зубчатым колесом 1 планетарного дифференциала, то снижается тангенс наклона луча 2 (сателлита 2 фиг.2), что вызывает снижение тангенса и скорости луча 3, изображающего скорость зубчатого колеса 3. Аналогичное явление происходит при увеличении скорости трансмиссии, связанной с колесом 1 планетарного дифференциала при увеличивающейся или при неизменной скорости двигателя.
Необходимый аналитический расчет чисел зубьев колес планетарного дифференциала приведен в технической литературе [3]. Это свойство связано с двумя степенями подвижности планетарного дифференциала, одна из которых реализуется механической связью с трансмиссией, другая - с двигателем (ДВС). Расчетная зависимость отношения мощностей и скоростей вращения звеньев 1 и 3 планетарного дифференциала от отношения скоростей вращения звеньев 1 и 4 при нулевой потребной мощности W3=0 на управление рекуперацией энергии показана на фиг.5. Эта зависимость проходит через характерную точку U3 14 передаточного отношения редуктора, получаемого остановкой зубчатого колеса 3 планетарного дифференциала 16. Эта расчетная зависимость практически совпадает с теоретической зависимостью изменения оптимального передаточного отношения при рекуперации энергии торможения транспортной машины и экспериментальными исследованиями передаточного механизма с маховичным аккумулятором энергии планетарного дифференциала [3]. Таким образом, предлагаемый способ и его техническое решение имеют теоретическое и экспериментальное подтверждение.
Лучший вариант устройства
Лучший вариант устройства имеет в качестве двигателя ДВС. Обе схемы планетарного дифференциала, как однорядная, так и двухрядная, обладают свойством увеличения модуля скорости вращения маховика при снижении скоростей водила трансмиссии и дополнительным свойством увеличения скорости вращения маховика при возрастании скорости двигателя, что особенно эффективно при соединении дифференциала параллельно автоматической коробке передач, в которой управление скоростью транспортной машины осуществляется одним органом, воздействующим одновременно как на орган изменения передаточного отношения коробки передач, так и на орган управления ДВС. Поэтому для обеспечения полной рекуперации энергии торможения и автоматизации процесса обмена кинетической энергии между маховиком и трансмиссией в транспортной машине следует использовать коробку передач плавного бесступенчатого изменения передаточного отношения.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Заявляемые способ и устройство позволяют повысить экономичность транспортных машин. Моделирование и опытные испытания [2] показали, что технически процесс изменения передаточного отношения механизма в соответствии с заявленным изобретением может быть реализован.
Литература
1. Патент ФРГ №3825179, кл. F03G/08, статья Гулиа Н.В. и др. «Пуск двигателя «ИР», №6, 1989, с.19.
2. Н.Н.Барбашов, И.В.Леонов. «Энергетическая модель передаточного механизма с маховичным аккумулятором энергии». Вестник МГТУ им. Н.Э.Баумана, №4, 2010 г.
3. И.И.Артоболевский. Теория механизмов и машин. М.: Наука, 1975, 640 с.
4. Кругов В.И. Автоматическое регулирование ДВС. М.: Машгиз, 1963, с.11.



Изобретение относится к области рекуперации энергии торможения транспортного средства. Согласно способу управления механизмом рекуперации энергии торможения непосредственный обмен кинетической энергии между маховиком и трансмиссией машины реализуется механическим путем автоматического изменения скорости вращения маховика. За счет изменения передаточного отношения планетарного дифференциала происходит увеличение модуля скорости вращения вала трансмиссии при снижении модуля скорости вала маховика и наоборот. Планетарный дифференциал имеет две степени подвижности, механически соединен с трансмиссией машины и с маховиком, а через дополнительное сцепление соединен с двигателем параллельно коробке передач. Коробка передач соединена как с трансмиссией, так и через главное сцепление с двигателем. Техническим результатом является повышение эффективности и полной рекуперации энергии торможения транспортной машины. 2 н. и 6 з.п. ф-лы, 5 ил.
1. Способ управления механизмом рекуперации энергии торможения, позволяющий в цикле движения транспортной машины обеспечивать частичное сохранение накопленной кинетической энергии в маховике при полном отключении двигателя на холостом ходу и в режиме торможения, заключающийся в том, что непосредственный обмен кинетической энергии между маховиком и трансмиссией машины реализуется механизмом, который последовательно соединяет трансмиссию машины, коробку передач, дополнительное сцепление, маховик, главное сцепление и двигатель; причем при торможении машины производят выключение двигателя с одновременным выключением обоих сцеплений, чем и сохраняют начальную скорость вращения маховика, равную скорости вращения двигателя перед торможением, и тем самым сохраняют в маховике часть накопленной кинетической энергии; причем накопленная кинетическая энергия в маховике обеспечивает запуск и разгон двигателя, отличающийся тем, что в транспортной машине обеспечивается постоянное суммарное значение кинетической энергии маховика и трансмиссии тем, что обмен кинетической энергии между маховиком и трансмиссией машины реализуется механическим путем автоматического изменения скорости вращения маховика таким образом, что увеличение модуля скорости вращения вала трансмиссии сопровождается снижением модуля скорости вращения вала маховика, и наоборот снижение модуля скорости вращения вала трансмиссии сопровождается увеличением модуля скорости вращения вала маховика за счет изменения передаточного отношения планетарного дифференциала, который механически соединен с трансмиссией машины и с маховиком, а через дополнительное сцепление соединен с двигателем параллельно коробке передач, которая непосредственно соединена как с трансмиссией, так и через главное сцепление соединена с двигателем.
2. Способ по п.1, отличающийся тем, что изменение передаточного отношения планетарного дифференциала между трансмиссией машины и маховиком осуществляется автоматически при изменении скорости вращения трансмиссии и двигателя таким образом, что увеличение модуля скорости вращения трансмиссии и двигателя приводит к снижению модуля скорости вращения маховика за счет того, что число степеней свободы планетарного дифференциала равно двум, а скорости вращения вала планетарного дифференциала, соединенного с маховиком, обеспечивается направление, противоположное скорости вращения вала планетарного дифференциала, соединенного с трансмиссией и двигателем, которым обеспечиваются расчетом чисел зубьев колес одинаковые направления вращения.
3. Способ по п.2, отличающийся тем, что в качества двигателя может быть использован электродвигатель или ДВС.
4. Устройство для осуществления способа управления механизмом рекуперации энергии торможения, включающее неподвижный корпус, маховик, двигатель, коробку передач с механизмами управления; причем коробка передач и двигатель соединены главным и вспомогательным сцеплениями; трансмиссия механически соединена с коробкой передач, имеющей в своем составе зубчатые передачи с неподвижными осями и планетарную передачу, в состав которых входят центральные колеса с внешними и внутренними зубьями и водило с сателлитами, отличающееся тем, что снабжено дополнительным сцеплением и планетарным дифференциалом с двумя степенями свободы, состоящим из звеньев: центральных колес с внешними и внутренними зубьями, расположенного на водиле с возможностью вращения сателлита, которые зацепляются между собой; причем планетарный дифференциал соединен с трансмиссией и с двигателем параллельно с механизмами коробки передач.
5. Устройство по п.4, отличающееся тем, что дополнительно снабжено зубчатой передачей с неподвижными осями и муфтой свободного хода с самотормозящими элементами, допускающими вращение маховика в одну сторону, расположенной между маховиком и планетарным дифференциалом.
6. Устройство по п.5, отличающееся тем, что образует в неподвижном корпусе отдельный дополнительный блок рекуперации, состоящий из маховика, зубчатой передачи с неподвижными осями, планетарного дифференциала, муфты свободного хода и дополнительного сцепления.
7. Устройство по п.4, отличающееся тем, что входит в состав автоматической коробки передач, маховик механически соединен зубчатой передачей с неподвижными осями с одним из центральных колес планетарного дифференциала, другое центральное колесо дополнительным сцеплением механически соединено с валом двигателя, а водило механически соединено с трансмиссией.
8. Устройство по п.4, отличающееся тем, что маховик механически соединен с одним из центральных колес планетарного дифференциала, другое центральное колесо механически соединено с трансмиссией, а водило дополнительным сцеплением соединено с валом двигателя.
| JP 61175364 A, 07.08.1986 | |||
| Способ получения титановых пигментов | 1940 |
|
SU61276A1 |
| WO 2009141646 A1, 26.11.2009 | |||
| Способ торможения и разгона транспортного средства с рекуперативным приводом | 1986 |
|
SU1431972A1 |
| СПОСОБ ЭНЕРГОНАКОПИТЕЛЬНОГО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2193706C2 |

