Изобретение относится к энергонакопительной технике и предназначено для управляемых тормозных систем транспортных средств (ТС) на электрической тяге.
Известный способ энергонакопительного торможения, примененный в рекуперативном тормозе Гиректа [Гулиа Н.В., Инерционные аккумуляторы энергии. Изд-во ВГУ, Воронеж, 1973, стр.104-106], включающем четырехскоростную планетарную коробку передач, соединенную малым солнечным колесом с двигателем, водилом - с карданным валом, а большим солнечным колесом - с маховиком; заключается в том, что при торможении передают кинетическую энергию ТС и энергию двигателя маховику, для чего уменьшают подачу топлива к двигателю, создавая на его валу тормозной момент, и изменяют передаточное отношение коробки передач для согласования скоростей элементов дифференциального механизма; при разгоне увеличивают подачу топлива, изменяют передаточное отношение коробки передач для согласования скоростей элементов дифференциального механизма и передают энергию от маховика и двигателя на разгон ТС.
Недостатком способа является ступенчатое изменение передаточного отношения, которое вызывает возникновение динамических нагрузок, и работа двигателя в переходных режимах.
Известный способ энергонакопительного торможения транспортного средства, взятый за прототип [заявка ФРГ OS 3031232, 1982 г., МКИ F 16 H 33/00], заключается в том, что подлежащая передаче или накоплению энергия вращения подводится через вал к зубчатому колесу дифференциального редуктора, в то время как другое зубчатое колесо соединено через второй вал с вращающейся массой, а водило соединено с гидравлическим мотором, который отдает гидроаккумулятору накапливаемую энергию в форме давления масла или извлекает из гидроаккумулятора потребляемую энергию, причем электрическое и гидравлическое управление определяет, какое количество энергии вращения передается, сохраняется или отдается.
Недостатками такого способа являются: сравнительно низкий КПД и возможность применения только на машинах, оборудованных гидроприводом.
Изобретение направлено на максимальное использование кинетической энергии ТС в управляемом торможении, что достигается за счет того, что при торможении транспортного средства разгоняют маховик, присоединенный к электродвигателю и исполнительному механизму транспортного средства посредством дифференциального редуктора, регулируют крутящий момент, создаваемый электродвигателем; отличающееся тем, что процесс торможения транспортного средства осуществляют в два этапа: на первом этапе растормаживают маховик и передают ему часть кинетической энергии транспортного средства, другую часть энергии рекуперируют в сеть, для чего переводят электродвигатель в генераторный режим; на втором этапе после остановки электродвигателя его реверсируют, сообщая скорость в направлении вращения маховика, и передают энергию от электродвигателя и транспортного средства к маховику до полной остановки транспортного средства.
На фиг.1 представлен план скоростей элементов дифференциального механизма электромеханической трансмиссии на первом этапе торможения, на фиг.2 - план скоростей элементов дифференциального механизма электромеханической трансмиссии на втором этапе торможения.
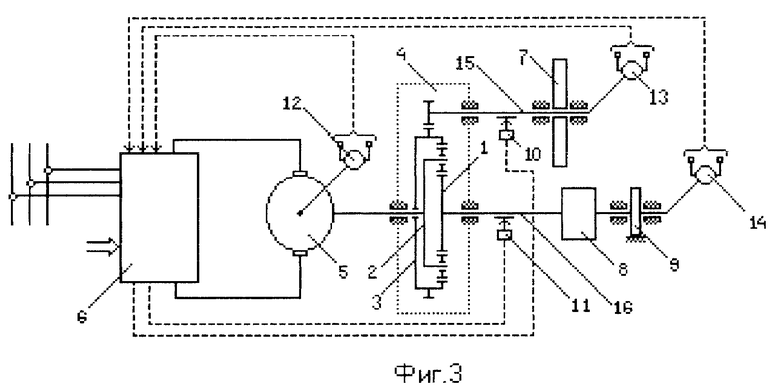
Предлагаемый способ энергонакопительного торможения возможно осуществить с помощью устройства, представленного на фиг.3.
Устройство представляет собой систему управляемого электромеханического привода, которая состоит из: четырехквадрантной системы управления 6, соединенной с сетью; электродвигателя 5; дифференциального редуктора 4, содержащего водило 2, малое солнечное колесо 1, большое солнечное колесо 3; маховика 7; реверсора 8; ведущих колес 9; тормозных элементов 10, 11; тахогенераторов 12, 13, 14.
Для осуществления предлагаемого способа энергонакопительного торможения электродвигатель 5 соединяют с водилом 2 дифференциального редуктора 4, маховик 7 с большим солнечным колесом 3, а малое солнечное колесо 1 с ведущими колесами 9 ТС.
Перед началом первого этапа торможения электродвигатель 5 работает в двигательном режиме (на линии 1-2 фиг.4) и передает крутящий момент через дифференциал 4, реверсор 8 к ведущим колесам 9 ТС. При этом вал 15 маховика 7 заторможен тормозом 10 и маховик 7 не вращается VМ=0. Система управления 6 устанавливает режим питания электродвигателя 5, необходимый для перехода рабочей точки А из положения 1 в положение 2 в двигательном и из положения 2 в положение 3 в генераторном режиме (фиг.4). Таким образом, на первом этапе торможения система управления 6 после получения команды на торможение снимает питание с электродвигателя 5 (точка 2 на фиг.4), а затем переводит его в генераторный режим, создавая на его валу тормозной момент МТ (точка 3 на фиг. 4). Одновременно с этим система управления 6 подает сигнал на тормозной элемент 10, который растормаживает вал 15 маховика 7.
В начальный момент торможения (фиг.1) угловая скорость электродвигателя соответствует линейной скорости водила Vд; угловая скорость маховика соответствует линейной скорости большого солнечного колеса Vм, которая в этот начальный момент равна нулю; угловая скорость колес ТС соответствует начальной линейной скорости малого солнечного колеса Vо.
При этом энергия ТС поступает с ведущих колес 9 через реверсор 8 на маховик 7 посредством большого солнечного колеса 3 и накапливается там, а с помощью водила 2 передается на вал электродвигателя 5, который преобразует ее в электрическую и через систему управления 6 передает в сеть. На первом этапе торможения скорость электродвигателя 5 уменьшается до нуля.
Первый этап торможения продолжается до полной остановки электродвигателя 5 Vд=0 фиг.1 (что соответствует точке 4 на фиг.4). К этому моменту маховик 7 разгоняется до скорости Vм п (фиг.1), а скорость малого солнечного колеса 1 уменьшается до Vo п.
Второй этап торможения начинается автоматически, когда в систему управления 6 поступает от тахогенератора 12 сигнал об остановке двигателя ωд = 0. В этот момент система управления переводит электродвигатель 5 в двигательный режим и изменяет направление его вращения на противоположное. Кинетическая энергия Ео ТС и электродвигателя Ед передаются маховику так, что Ем= Ео+Ед. Таким образом, на втором этапе торможения электродвигатель 5 работает на участке между точками 4-5 на фиг.4 в двигательном режиме. Второй этап торможения продолжается до полной остановки ТС Vo=0 (фиг 2). При этом маховик 7 разгоняется до скорости Vм к, а электродвигатель 5 до скорости Vд (точка 5 на фиг.4). Когда система управления 6 получает от тахогенератора 14 сигнал об остановке ТС ωo = 0, она подает сигнал на тормозной элемент 11, который затормаживает вал 16 малого солнечного колеса 1. Система управления 6 снимает питание с электродвигателя 5, и он в течение всего периода стоянки работает в режиме выбега (точка 6 на фиг.4) совместно с маховиком 7.
В зависимости от направления последующего движения переключают реверсор 8.
Разгон ТС может осуществляться по аналогичной схеме в обратном порядке.


Изобретение относится к управляемым тормозным системам транспортных средств на электрической тяге. К электродвигателю и исполнительному механизму транспортного средства присоединяют маховик посредством дифференциального редуктора. Процесс торможения осуществляют в два этапа. На первом этапе растормаживают маховик и передают ему часть кинетической энергии транспортного средства, другую часть энергии рекуперируют в сеть, для чего переводят электродвигатель в генераторный режим. На втором этапе после остановки электродвигателя его реверсируют, сообщая скорость в направлении вращения маховика, и передают энергию от электродвигателя и транспортного средства к маховику до полной остановки транспортного средства. Данный способ характеризуется максимальным использованием кинетической энергии транспортного средства в управляемом торможении. 4 ил.
Способ энергонакопительного торможения транспортного средства, заключающийся в том, что при торможении транспортного средства разгоняют маховик, присоединенный к электродвигателю и исполнительному механизму транспортного средства посредством дифференциального редуктора, регулируют крутящий момент, создаваемый электродвигателем, отличающийся тем, что процесс торможения транспортного средства осуществляют в два этапа: на первом этапе растормаживают маховик и передают ему часть кинетической энергии транспортного средства, другую часть энергии рекуперируют в сеть, для чего переводят электродвигатель в генераторный режим; на втором этапе после остановки электродвигателя его реверсируют, сообщая скорость в направлении вращения маховика, и передают энергию от электродвигателя и транспортного средства к маховику до полной остановки транспортного средства.
| DE 3031232 А1, 25.03.1982 | |||
| DE 4305055 A1, 25.08.1994 | |||
| US 4433744 A, 28.02.1984 | |||
| ТРАНСМИССИЯ ЭЛЕКТРОМОБИЛЯ | 1997 |
|
RU2123944C1 |
