Область техники
Настоящее изобретение, в общем, относится к системе регулирования шага лопасти (лопастей) воздушного винта в газотурбинном авиационном двигателе.
Изобретение также относится к воздушному винту, снабженному указанной системой регулирования, и к способу управления этой системой.
Изобретение относится к воздушному винту любого типа, применяемому в системе с одним воздушным винтом или в системе с контрвинтом, предпочтительно, авиационного турбореактивного или турбовинтового двигателя.
Известный уровень техники
Турбовинтовой двигатель, как правило, снабжен системой регулирования шага лопасти воздушного винта, обеспечивающей соответствие ориентации указанных лопастей и скорости самолета.
Система разработана таким образом, что лопасти блокируются, сохраняя зафиксированный угол атаки, когда система регулирования не приведена в действие, и обеспечивается сопротивление действию крутящего момента, создаваемого аэродинамической силой, которая действует на лопасти во время вращения воздушного винта. При этом, система, как правило, оснащается, блокирующим механизмом, обычно такого типа, который обеспечивает трение между двумя участками, к примеру, дисковым тормозом. Чтобы произвести регулировку угла атаки лопастей, предварительно необходимо выполнить этап их разблокировки путем устранения контакта между двумя частями блокирующего механизма.
Указанный блокирующий механизм имеет недостатки, сильно усложняющие концепцию системы регулирования, принимая во внимание массу, надежность и ограниченность пространства.
Описание изобретения
Цель изобретения состоит в том, чтобы преодолеть, по меньшей мере, частично недостатки, упомянутые выше, возникающие при реализации систем регулирования согласно известному уровню техники.
Таким образом, задачей изобретения, прежде всего, является система регулирования шага лопасти воздушного винта в авиационном газотурбинном двигателе, содержащая:
- первую, по существу, кольцевую дорожку, которая должна быть соединена, по меньшей мере, с одной лопастью воздушного винта и предназначена при вращении обеспечить установку угла атаки указанной лопасти, причем, указанная первая дорожка, имеет, по меньшей мере, одну V-образную канавку, образованную двумя поверхностями В1, В2;
- вторую по существу, кольцевую дорожку (56), концентрическую с первой дорожкой;
- ведущий элемент для первой дорожкой, по существу, кольцевой, размещенный между первой и второй дорожками концентрично последней, причем, указанный ведущий элемент имеет, по меньшей мере, один участок с угловым углублением, которое образуют две поверхности A1, A2, расположенные на расстоянии друг от друга; и
- по меньшей мере, один блокирующий элемент, предусмотренный между первой и второй дорожками, размещенный на указанном участке с угловым углублением ведущего элемента и в V-образной канавке первой дорожкой, причем,
во время работы газотурбинного двигателя указанный блокирующий элемент, способен занимать:
- нормальное заклиненное положение, при котором, с одной стороны, он контактирует со второй дорожкой, будучи размещенным между указанными двумя поверхностями A1, A2 ведущего элемента на расстоянии от последнего, и, с другой стороны, контактирует с V-образной канавкой, причем, аэродинамическая сила, действующая на лопасть воздушного винта во вращении, создает крутящий, момент заданного направления на указанной первой дорожкой, в результате чего, одна из указанных двух поверхностей B1, B2 V-образной канавки, т.е. поверхность, наиболее отдаленная выше по ходу указанного заданного направления крутящего момента, действует первой контактной силой F1 на блокирующий элемент, и указанная вторая дорожка действует возникающей силой R реакции на указанный блокирующий элемент, причем, первая контактная сила F1 и сила R реакции обеспечивают заклинивание первой и второй дорожек, приводя последние в совместное вращение; и
- положение разблокировки, при котором блокирующий элемент находится в контакте с указанной поверхностью B1 V-образной канавки, т.е. с поверхностью, наиболее отдаленной выше по ходу, и также с одной из двух поверхностей A1, A2 ведущего элемента, причем, положение разблокировки обеспечивается приложением к указанному ведущему элементу крутящего момента, величина которого обеспечивает создание на указанных соответствующих поверхностях A1, A2 второй контактной силы F2, действующей на блокирующий элемент, которая является достаточной, чтобы противодействовать указанной силе R реакции указанной второй дорожкой, приложенной к указанному блокирующему элементу, и также нарушить указанное заклинивание, к тому же, при указанном положении разблокировки допускается смещение во вращении, согласно направлению крутящего момента, блока, содержащего указанную первую дорожку, указанный блокирующий элемент и указанный ведущий элемент, относительно второй дорожки.
Изобретение отличается тем, что позволяет производить автоматическое блокирование лопастей, без приложения какого-либо ведущего вращающего момента к ведущему элементу, посредством блокирующего элемента, занимающего свое нормальное заклиненное положение, благодаря заклиниванию первой и второй дорожек.
Тем не менее, при необходимости корректировки шага лопастей к ведущему элементу прикладывается надлежащий крутящий момент заданного направления, при этом, указанный крутящий момент позволяет разблокировать систему, помещая блокирующий элемент в положение разблокировки, и приводит во вращение первую дорожку, обеспечивая установку угла атаки лопастей. Следует отметить, что разблокировка и вращение первой дорожкой осуществляются одновременно или почти одновременно.
Соответственно, система регулирования шага лопасти согласно изобретению, имея упрощенную конструкцию сравнительно с конструкциями, соответствующими известному уровню техники, дает возможность простым способом обеспечить вышеупомянутую регулировку для разблокировки лопастей и для изменения угла атаки лопастей. В этой связи, не требуется какой-либо отдельный блокирующий механизм, применяющийся ранее, что создает преимущества относительно массы, надежности и занимаемого пространства.
Предпочтительно, система содержит упругое возвратное устройство, соединенное с указанным ведущим элементом и позволяющее, при отсутствии приложения к последнему указанного крутящего момента, сместить во вращении указанный ведущий элемент относительно указанной первой дорожкой и, тем самым, возвратить указанный блокирующий элемент в нормальное заклиненное положение.
Предпочтительно, указанная первая дорожка размещена снаружи, относительно указанной второй дорожкой, хотя может быть рассмотрено обратное техническое решение, при котором указанная вторая дорожка размещена снаружи, относительно указанной первой дорожкой, что не выходит за рамки объема изобретения.
Система, предпочтительно, содержит приводной двигатель, регулирующий указанный ведущий элемент во вращении. Указанный двигатель предназначен для создания крутящего момента, вызывающего смещение блокирующего элемента к его положению разблокировки и также вызывающего вращение первой дорожкой относительно второй дорожкой.
Предпочтительно, указанный блокирующий элемент является роликом и указанные поверхности A1, A2, B1, B2, с которыми он взаимодействует, являются, по существу, плоскими поверхностями. Альтернативно, указанный блокирующий элемент может являться шаром, а указанные поверхности A1, A2, B1, B2, с которыми он взаимодействует, могут представлять собой, по существу, сферические поверхности. И в том и в другом случае предусмотрены элементы, которые перекатываются относительно друг друга, позволяя уменьшить трение, что является предпочтительным в сравнении со стопорными механизмами, типа дисковых тормозов, согласно известному уровню техники.
Предпочтительно, система содержит несколько блокирующих элементов, расположенных под углом на расстоянии друг от друга вокруг оси первой и второй дорожек, причем, каждый размещен на соответствующем ему участке с угловым углублением ведущего элемента и в соответствующей ему V-образной канавке первой дорожкой. Это позволяет в периферическом направлении более равномерно распределить силы, прилагаемые для заклинивания первой и второй дорожек. Кроме того, при использовании нескольких блокирующих элементов, на каждый блокирующий элемент в нормальном заклиненном положении действуют силы сжатия, которые меньше сил сжатия, которые действуют на единственный используемый блокирующий элемент, что, в частности, позволяет повысить надежность системы.
Имеется возможность предложить систему регулирования одной лопасти воздушного винта газотурбинного двигателя или одновременно нескольких лопастей.
Предпочтительно, система содержит скользящий элемент, предназначенный для взаимодействия с лопастями таким образом, что при его смещении указанные лопасти приближаются/отдаляются от положения, соответствующего минимальному углу атаки, причем, указанный скользящий элемент регулируется вращающимися средствами регулирования, вращательное движение которых преобразуется в движение скольжения указанного элемента, при этом, указанные вращающиеся средства регулирования вращаются совместно с указанной первой дорожкой.
Задачей изобретения также является воздушный винт для авиационного газотурбинного двигателя, содержащий, по меньшей мере, одну систему регулирования шага лопасти, например, вышеописанную.
Указанный воздушный винт, предпочтительно, содержит ротор воздушного винта, предназначенный вращаться относительно статора вокруг продольной оси воздушного винта, и содержит несущие лопасти, причем, указанный воздушный винт, кроме того, содержит указанную систему регулирования шага лопасти, позволяющую перемещать последнюю между положением, соответствующим минимальному углу атаки, и положением, соответствующим максимальному углу атаки, при этом, указанная система регулирования шага лопасти содержит скользящий соответственно продольной оси элемент, взаимодействующий с указанными лопастями таким образом, что при его смещении указанные лопасти приближаются/отдаляются от положения, соответствующего минимальному углу атаки, причем, указанный скользящий элемент регулируется средством регулирования, вращательное движение которых вокруг продольной оси преобразуется в движение скольжения указанного элемента относительно той же оси, при этом, указанное средство регулирования вращается совместно с указанной первой дорожкой, а вторая дорожка вращается совместно с ведущим валом, несущим указанный ротор воздушного винта, причем, указанная система регулирования шага лопасти, к тому же, содержит приводной двигатель, позволяющий приводить в указанное вращательное движение указанное регулирующее средство, а лопасть, в свою очередь, соединена с указанным скользящим элементом.
Предпочтительно, указанное регулирующее средство содержит шарико-винтовую передачу.
Предпочтительно, указанный скользящий элемент, представляющий собой скользящий конус, взаимодействует со смещенным от центра пальцем каждой из лопастей. Объектом изобретения также является авиационный турбинный двигатель, содержащий, по меньшей мере, один воздушный винт, описанного выше типа.
Турбинный двигатель, предпочтительно, содержит описанную выше систему контрвинта, применяемую для каждого из двух воздушных винтов, причем, указанный турбинный двигатель является, предпочтительно, турбовинтовым двигателем, но, альтернативно, может представлять собой турбореактивный двигатель. Само собой разумеется, что в последнем случае система воздушного винта содержит вентилятор турбореактивного двигателя.
В конечном счете, объектом изобретения также является способ управления системой регулирования шага лопасти воздушного винта в газотурбинном двигателе, описанного выше типа. Согласно этому способу, при необходимости установки угла атаки лопасти, к указанному ведущему элементу прикладывается соответствующий крутящий момент.
Другие преимущества и особенности изобретения будут очевидны из не ограничивающего подробного описания, представленного ниже.
Краткое описание чертежей
Ниже приведено детальное описание предпочтительных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи.
Фиг.1 - вид в сечении участка воздушного винта авиационного газотурбинного двигателя согласно предпочтительному варианту осуществления настоящего изобретения.
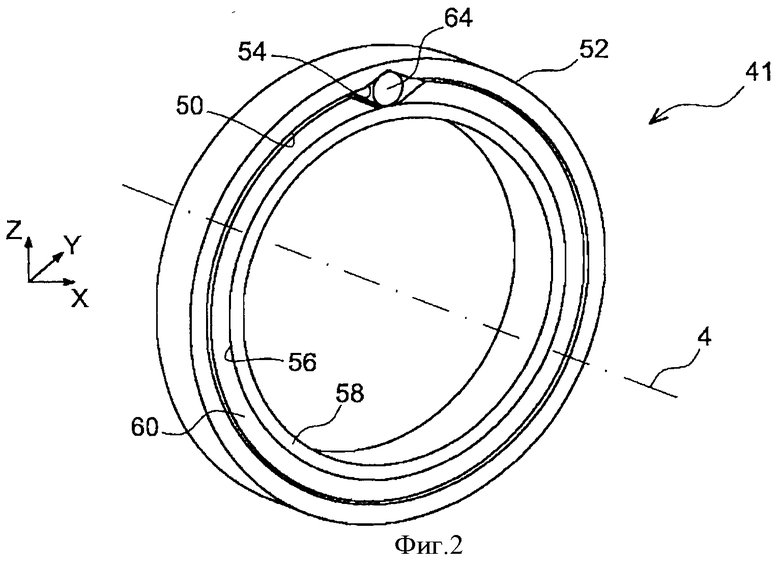
Фиг.2 - вид в перспективе передаточного и блокирующего модуля, установленного в системе регулирования шага лопасти воздушного винта, представленного на фиг.1.
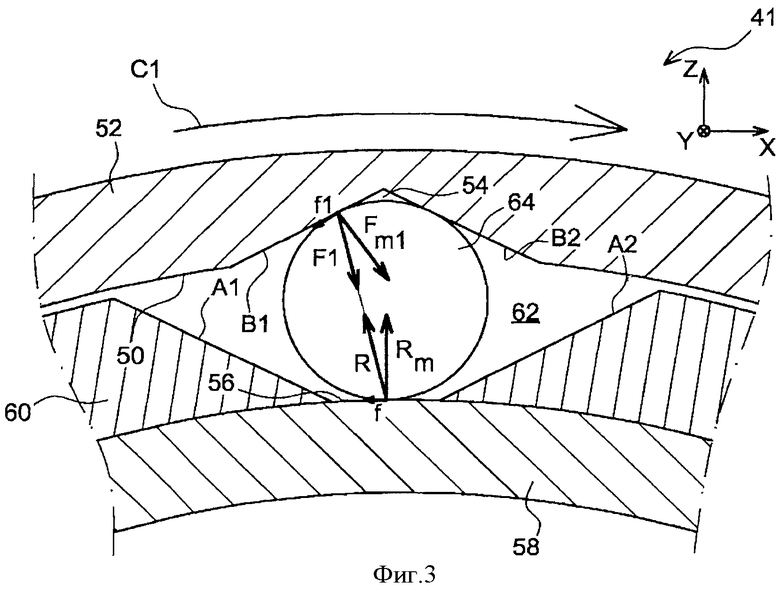
Фиг.3 - передаточный и блокирующий модуль в сечении по линии III-III, показанной на фиг.1, с блокирующим элементом модуля, занимающим свое нормальное заклиненное положение.
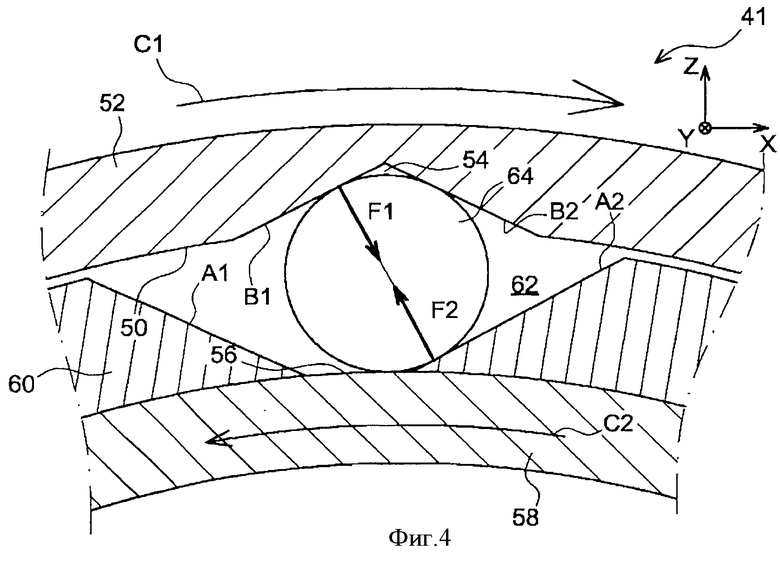
Фиг.4 - вид, аналогичный виду, представленному на фиг.3, но отличающийся тем, что блокирующий элемент модуля занимает положение разблокировки при установке шага лопастей с целью уменьшения угла атаки последних.
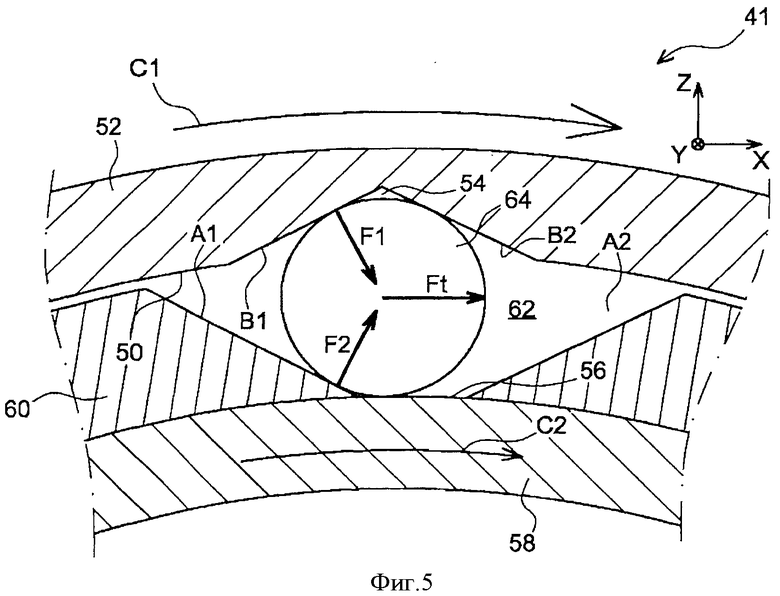
Фиг.5 - вид, аналогичный виду, представленному на фиг.4, но отличающийся тем, что блокирующий элемент модуля занимает положение разблокировки при установке шага лопастей с целью увеличения угла атаки последних.
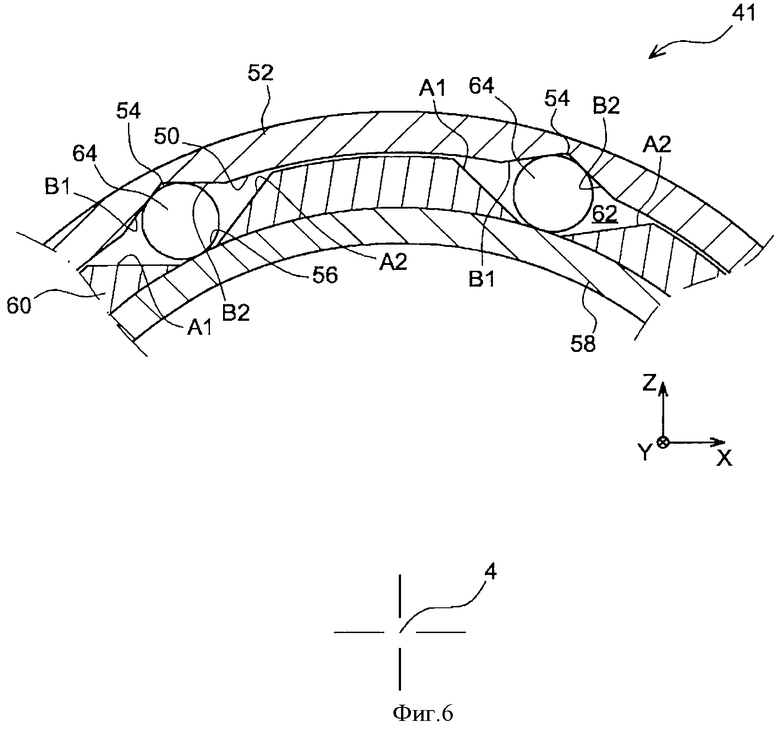
Фиг.6 - передаточный и блокирующий модуль согласно другому предпочтительному варианту осуществления изобретения.
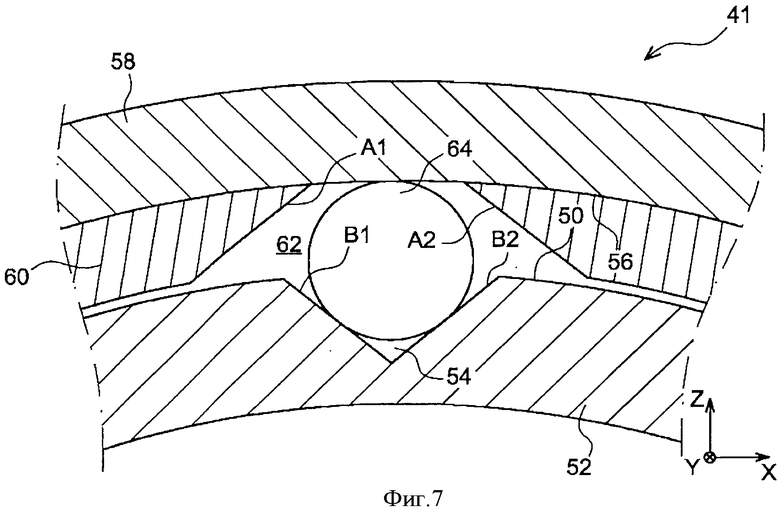
Фиг.7 - передаточный и блокирующий модуль согласно еще одному предпочтительному варианту осуществления изобретения.
Подробное описание предпочтительных вариантов осуществления изобретения
На фиг.1 показана часть воздушного винта 1 турбовинтового двигателя согласно предпочтительному варианту осуществления настоящего изобретения, входящего, например, в систему контрвинта.
Ось Х на чертеже соответствует продольному направлению воздушного винта 1, которое, в свою очередь, соответствует продольному направлению турбовинтового двигателя, в состав которого входит воздушный винт 1. Ось Y соответствует боковому направлению воздушного винта 1 и ось Z обозначает вертикальное направление или высоту, причем, указанные три оси являются ортогональными.
Воздушный винт 1 содержит статор или кожух 2, центрированный по продольной оси 4, параллельной оси X. Указанный статор 2 составляет единое целое с другими кожухами турбинного двигателя. В этой связи, воздушный винт 1 выполнен так, что не содержит наружного радиального обтекателя, охватывающего лопасти, т.е. относится к типу «открытого ротора», как показано на фиг.1.
Кроме того, на чертеже стрелкой 10, параллельной оси X, показано основное направление потока воздуха, проходящего через воздушный винт 1, которое является базовым для используемых здесь терминов «выше по ходу» и «ниже по ходу».
Следует отметить, что при использовании системы с контрвинтом оба воздушных винта (показан один) вращаются в противоположных направлениях вокруг оси 4, по которой они центрированы, и их вращение происходит относительно статора 2, остающегося неподвижным.
Во всем описании отмечается, что понятие «скорость вращения» данного элемента соответствует его скорости вращения, относительно неподвижного статора 2, вокруг продольной оси 4, если только не предусмотрено иное.
Воздушный винт 1 содержит ведущий вал 16, центрированный по оси 4, который приводится во вращение устройством, обеспечивающим передачу вращения (не показано), например, представляющим собой планетарный зубчатый редуктор, который приводится в движение турбиной турбинного двигателя.
На конце полого вала 16, ниже по ходу, смонтирован ротор 18, на наружном конце которого, т.е. на кольцевом венце, радиально размещены лопасти 6 воздушного винта. Для размещения хвостовиков 21 лопастей 6 в роторе 18 выполнены отверстия 20, причем, в каждой из лопастей имеется смещенный от главной оси 24 лопасти палец 22.
Следует отметить, что ротор 18 имеет, приблизительно, конусную форму и его конусность направлена от конца ведущего вала 16 ниже по ходу, и выше по ходу имеется отверстие.
Смещенные от центра пальцы 22, которые выступают радиально внутрь, являются частью системы регулирования шага 26 лопастей, позволяющей перемещать лопасти между положением, соответствующим минимальному углу атаки, и положением, соответствующим максимальному углу атаки, относительно оси 4. Смещение каждой лопасти 6 между этими двумя положениями происходит при повороте последней вокруг своей оси, т.е. вокруг главной оси 24, которая также совпадает с осью сопряженного отверстия 20.
При этом система регулирования шага 26 лопастей содержит первый скользящий элемент, к примеру, регулировочный конус 28, центрированный по оси 4 и перемещающийся относительно статора вдоль указанной оси.
Указанный регулировочный конус 28 имеет на своем конце выше по ходу от торца большего диаметра ряд отверстий 30 для установки смещенных от центра пальцев 22 лопастей, как показано на чертеже. Смещение конуса 28 в первом направлении 32а, т.е. выше по ходу оси 4, обеспечивает приближение лопастей 6 к их положению, соответствующему минимальному углу атаки, также называемому минимальным или нейтральным угловым положением, в частности, требуемым при флюгировании воздушного винта 1. Как упоминалось ранее, поворот лопастей 6 в отверстиях 20 вокруг своих осей 24 к нейтральному положению, противоположному показанному на фиг.1, вызывается смещением конуса 28, который воздействует на смещенные от центра пальцы 22 лопастей. Конус 28, смещающийся во втором направлении 32b, на фиг.1, фактически, показан в своем конечном положении смещения, позволяющем лопастям 6 занимать положение, соответствующее максимальному углу атаки, противоположно нейтральному положению, при котором предусматривается флюгирование воздушного винта. Однако, альтернативно, система воздушного винта 1 может быть разработана таким образом, чтобы лопасти 6а занимали нейтральное положение, когда конус 28, смещающийся в указанном втором направлении 32b, противоположном первому направлению 32а, находится в своем конечном положении, что не выходит за рамки объема изобретения.
Подобно тому, как описывалось выше, смещение конуса 28 во втором направлении 32b, т.е. вниз по ходу оси 4, вызывает приближение лопастей 6 к их положению, соответствующему максимальному углу атаки. Таким образом, вращение лопастей 6 вокруг их осей 24 вызывается смещением конуса 28, который воздействует на смещенные от центра пальцы 22 лопастей.
Следует отметить, что благодаря размещению смещенных от центра пальцев 22 в отверстиях 30 конуса, посредством шаровых соединений, можно сформировать блок, включающий вал 16, ротор 18 и лопасти 6, которые вращаются вместе относительно оси 4. Следует отметить, что смещение пальцев 22 и конуса 28 может являться комбинацией смещения по оси 4 и поворота вокруг нее. При этом, вводя кольцо между смещенными от центра пальцами хвостовика лопасти и конусом, можно избежать двойного движения. В этом случае, вышеупомянутое вращательное движение будет происходить между, кольцом и конусом и, таким образом, будет обеспечиваться только осевое смещение конуса.
Чтобы обеспечить смещение регулировочного конуса 28 в направлениях 32а и 32b, система регулирования шага 26 лопастей снабжена передаточным механизмом, например, шариково-винтовой передачей 38, центрированной по оси 4. Указанная передача 38 имеет известную конструкцию и позволяет преобразовать вращательное движение вокруг оси 4 в смещение конуса 28 относительно нее.
Шарико-винтовая передача 38 расположена на валу 16 и окружена регулировочным: конусом 28, внутренний цилиндрический участок 43 которого взаимодействует с внешней резьбой шариково-винтовой передачи 38, зафиксированной от осевого перемещения относительно ротора 18 и статора 2. Следует отметить, что конус 28 является единственным из элементов вышеупомянутого воздушного винта 1, который смещается по оси 4 относительно статора 2, а другие элементы остаются в зафиксированном от смещения положении относительно друг друга и относительно статора 2.
Нижний по ходу конец шариково-винтовой передачи 38 взаимодействует с двигателем 40, при этом, вращательное движение посредством передаточного и блокирующего модуля 41 передается указанной шариково-винтовой передаче для смещения конуса 28, Двигатель 40 имеет фиксированный статор на роторе 18 воздушного винта 1, например, в кольцевой опоре указанного ротора 18, к тому же, ротор закреплен на передаточном и блокирующем модуле 41, который далее будет описываться со ссылкой на фиг.2 и 3.
Модуль 41 содержит первую кольцевую дорожку 50, принадлежащую первому кольцевому участку 52 или кольцу, центрированному по оси 4. Этот участок 52, который является внешним участком модуля, предназначен для соединения с винтом шариково-винтовой передачи 38 на нижнем по ходу конце винта. Альтернативно, и как показано на фиг.1, указанный кольцевой участок 52 может составлять единое целое с винтом шариково-винтовой передачи 38, образуя нижний по ходу конец винта. Вращение этого участка 52 обеспечивает регулировку угла установки лопастей посредством конуса 28, описанного выше.
В связи с вышеизложенным, первая дорожка 50 сформирована на внутренней поверхности кольца 52 и имеет V-образную канавку 54, образованную двумя поверхностями В1 и В2. В сечении, например, как показано на фиг.3, поверхности В1 и В2, каждая из которых является, предпочтительно, плоской, совместно формируют V-образную канавку, направленную к оси воздушного винта, т.е. направленную радиально внутрь. Величина угла V строго не определена, например, эта величина может составлять от 100 до 170° и, в частности, выбирается с учетом коэффициентов трения используемых материалов, для обеспечения заклинивания. V-образная канавка является симметричной относительно радиуса, проходящего через вершину V; угол, образованный каждой ветвью V и тангенциальным направлением, предпочтительно, составляет от 5 до 85° и выбирается, предпочтительно, с учетом коэффициентов трения используемых материалов.
Модуль 41 содержит вторую кольцевую дорожку 56, концентричную первой дорожке и принадлежащую второму кольцевому участку 58 или кольцу, центрированному по оси 4. Указанный участок 58, который, предпочтительно, является внутренним участком модуля и закреплен на валу 16. Альтернативно, и как показано на фиг.1, указанный кольцевой участок 58 может составлять единое целое с ведущим валом 16, образуя продольную секцию последнего. Поэтому вторая дорожка 56 сформирована на наружной поверхности кольца 58.
Модуль 41, с другой стороны, снабжен кольцевым ведущим элементом 60, расположенным концентрично между первой и второй дорожками. Указанный элемент 60 находится, предпочтительно, в контакте со второй дорожкой 56 и также может находиться в кольцевом контакте с первой дорожкой 50. Предпочтительно, он соединен непосредственно с ротором двигателя 40 для привода во вращение.
Модуль имеет участок 62 с угловым углублением, образованным двумя поверхностями A1, A2, расположенными на расстоянии друг от друга в тангенциальном направлении. В сечении, как показано на фиг.3, эти две поверхности A1 и A2, каждая из которых, предпочтительно, является плоской ориентированы наружу, т.е. к первой дорожке 50 и, конкретнее, к ее V-образной канавке 54. Угол, образованный каждой из поверхностей A1, A2 и тангенциальным направлением, составляет, предпочтительно, от 5 до 85° и, предпочтительнее, идентичен описанному выше углу, образованному поверхностями В1 или В2. Эти две поверхности A1, A2 ориентированы друг к другу так, что формируют верхний участок V-образного углубления, расширяющийся радиально наружу, и область, в которой расположена вторая дорожка 56.
Предпочтительно, в нормальном положении, показанном на фиг.3, которое будет поясняться далее, поверхность A1 расположена, по существу, противоположно и параллельно поверхности В2 V-образной канавки, а поверхность A2 расположена, по существу, противоположно и параллельно поверхности В1 V-образной канавки.
Кроме того, два конца вращающегося ведущего элемента 60 расположены на расстоянии друг от друга в тангенциальном направлении для обеспечения контакта блокирующего элемента 64 модуля со второй дорожкой 56. Фактически, блокирующий элемент 64, предпочтительно, в виде ролика, ось которого параллельна оси X, установлен между первой и второй дорожками 50, 56 на участке 62 с угловым углублением и в V-образной канавке 54 первой дорожки.
На фиг.3 показан модуль 41 с блокирующим элементом 64, занимающим во время работы газотурбинного двигателя нормальное центрированное положение.
В нормальном положении блокирующий элемент, при размещении между двумя поверхностями A1, A2, на расстоянии от последней, с одной стороны, контактирует со второй дорожкой 56 и, с другой стороны, контактирует с V-образной канавкой 54. При вращении воздушного винта во время работы газотурбинного двигателя аэродинамическая сила действует на лопасти и создает крутящий момент С1 заданного направления на кольцевом участке 52, благодаря его механическому соединению с лопастями посредством конуса 28 и шариково-винтовой передачей 38.
Этот крутящий момент С1, показанный схематично стрелкой на фиг.3, создает первую контактную силу Р1 между поверхностью В1 и блокирующим элементом 64, причем, поверхность В1 соответствует, фактически, той из двух поверхностей В1, В2 V-образной канавки, которая наиболее отдалена выше по ходу в данном направлении крутящего момента С1, в данном случае, по направлению часовой стрелки. Следует отметить, что контактная сила F1 может быть разложена на нормальную силу Fm1, ортогональную поверхностности В1, и силу f1 трения.
Сила F1 вызывает силу R реакции второй дорожки 56, действующую на блокирующий элемент 64, которая раскладывается на нормальную ортогональную силу Rm, действующую на дорожку 56, и силу f1 трения.
В рассматриваемом случае ролик 64, предпочтительно, находится в контакте только с двумя вышеупомянутыми элементами В1, В2. Первая контактная сила F1 и сила R реакции, которые располагаются внутри конуса трения, обеспечивают заклинивание первой и второй дорожках 50, 56, заставляя последние вращаться вместе.
В этом нормальном заклиненном положении, когда двигатель 40, представляющий собой флюгерный двигатель воздушного винта, не работает, вторая дорожка 56.приводится во вращение валом 16, это вращение передается первой дорожке 50 и далее винту шариково-винтовой передачи 38, связанному с первой дорожкой 50. Соответственно, элементы 16, 18, 41, 38, 28, 6, образующие блок, вращаются совместно в направлении и со скорость, вращения вала 16, в результате чего, шаг лопастей остается неизменным. Роликом 64 автоматически обеспечивается парирование аэродинамической силы, прикладываемой к лопастям, не оказывая влияния на их угол атаки, который сохраняет первоначально установленную величину.
Чтобы обеспечить изменение угла атаки лопастей, система 26 должна быть регулируемой и должна позволять смещать ролик 64 в другое положение, именуемое положением разблокировки.
На фиг.4 представлена ситуация, когда положение лопастей нужно изменить, а именно, привести их в положение, соответствующее минимальному углу атаки.
В данной ситуации элемент 64 в положении разблокировки находится в контакте с поверхностью В1 V-образной канавки, т.е. с поверхностью, наиболее отдаленной выше по ходу, и также с поверхностью А2 ведущего элемента 60. Это положение разблокировки обеспечивается приложением крутящего момента С2, создаваемого двигателем 40, к ведущему элементу 60, приводя его в контакт с роликом 64. Величина крутящего момента С2, направленного, в данном случае, против часовой стрелки, обеспечивает создание на соответствующей поверхности А2 второй контактной силы F2, действующей на ролик 64, которая является достаточной, чтобы противодействовать силе R реакции второй дорожки 56, приложенной к этому ролику. При приложении крутящего момента С2 ролик 64 уже не находится только в контакте с поверхностью В1 и с поверхностью А2, а также, возможно, с поверхностью В2, но больше контактирует со второй дорожкой 56. Предпочтительно, эти две силы F1, F2 равны по величине, лежат на одном диаметре ролика 64, и противоположны по направлению, что обусловлено, по существу, параллельности поверхностей А2, В1.
В связи с этим, нарушается нормальное заклиненное положение.
В этом положении разблокировки, под действием момента С2, приложенного двигателем, допускается поворот первой дорожки 50, ролика 64 и ведущего элемента 60, относительно второй дорожки 56.
Соответственно, крутящий момент С2 позволяет одновременно разблокировать модуль 41 и привести кольцо 52 во вращение относительно кольца 58 вала 16.
Когда двигатель 40 приводится в действие для создания крутящего момента С2, скорость, с которой винт шариково-винтовой передачи 38 вращается относительно статора 2, будет отличаться от скорости, с которой конус 28 вращается относительно статора 2, при этом, конус 28 составляет единое целое с ротором 18; в результате возникновения относительной скорости вращения этих двух элементов обеспечивается требуемое перемещение конуса 28 в направлении 32а вдоль винта шариково-винтовой передачи 38, положение которого относительно статора 2 сохраняется фиксированным. Таким образом, за счет регулировки двигателя 40, позволяющей прикладывать к элементу 60 крутящий момент С2 соответствующей величины, имеется возможность регулировать шаг лопастей 6 из положения, соответствующего максимальному углу атаки, в положение, соответствующее минимальному углу атаки.
При остановке двигателя 40 модуль 41 автоматически восстанавливает свою конфигурацию, устанавливая блокирующий ролик 64 в нормальное положение посредством упругого возвратного устройства, соединенного с ведущим элементом 60 такого, как пружина (не показано). Пружина, фактически, позволяет повернуть указанный: ведущий элемент 60 относительно первой дорожки 50, нарушая, при этом, контакт между роликом 64 и поверхностью А2 и способствуя созданию нового контакта между роликом 64 и второй дорожкой 56, в результате чего, обеспечивается заклинивание.
В другой ситуации, когда положение лопастей 6 нужно изменить, а именно, привести их в положение, соответствующее максимальному углу атаки, элемент 64 находится в положении разблокировки, показанном на фиг.5, обеспечивающем контакт с поверхностью В1 V-образной канавки, т.е. с поверхностью, наиболее отдаленной выше по ходу, и также с поверхностью А1 ведущего элемента 60. Положение разблокировки обеспечивается приложением крутящего момента С2, создаваемого двигателем 40, к ведущему элементу 60, приводя его в контакт с роликом 64. Величина крутящего момента С2, направленного, в данном случае, по часовой стрелке, обеспечивает создание на соответствующей поверхности А2 второй контактной силы F2, действующей на ролик 64, которая является достаточной, чтобы противодействовать силе R реакции второй дорожки 56, приложенной к этому ролику. При приложении крутящего момента С2 ролик 64 уже не находится только в контакте с поверхностью В1 и с поверхностью А1, а также, возможно, с поверхностью В2, но больше контактирует со второй дорожкой 56. Предпочтительно, эти две силы F1, F2 равны по величине, результирующая сила Ft которых имеет тангенциальное направление, что обеспечивается благодаря одинаковому углу наклона между, с одной стороны, тангенциальным направлением и поверхностью А1 и, с другой стороны, тангенциальным направлением и поверхностью В1.
Поскольку результирующая сила Ft является тангенциальной, реакция R дорожки 56, действующей на ролик 64, будет нулевой. Соответственно, нарушается нормальное заклиненное положение.
В этом положении разблокировки под действием крутящего момента С2, создаваемого двигателем, обеспечивается поворот первой дорожки 50, ролика 64 и ведущего элемента 60, относительно второй дорожки 56.
Соответственно, крутящий момент С2 позволяет одновременно разблокировать модуль 41 и привести во вращение кольцо 52 относительно кольца 58 вала 16 в направлении крутящего момента С2.
Соответственно, когда двигатель 40 приводится в действие для создания указанного крутящего момента С2, скорость вращения винта шарико-винтовой передачи 38 будет отличаться от скорости конуса 28, который является неотъемлемой частью ротора 18; в результате возникновения относительной скорости вращения этих двух элементов обеспечивается требуемое перемещение конуса 28 в направлении 32b вдоль винта шарико-винтовой передачи 38, положение которого относительно статора 2 сохраняется фиксированным. Таким образом, за счет регулировки двигателя 40, позволяющей прикладывать к элементу 60 крутящий момент С2 необходимой величины, имеется возможность регулировать шаг лопастей 6 от положения, соответствующего минимальному углу атаки, к положению, соответствующему максимальному углу атаки.
При остановке двигателя 40 модуль 41 автоматически восстанавливает свою конфигурацию, устанавливая нормальное положение блокирующего ролика 64 посредством вышеупомянутого упругого возвратного устройства, соединенного с ведущим элементом 60 в виде разрезного кольца.
Согласно другому предпочтительному варианту осуществления настоящего изобретения, предусмотрено несколько блокирующих элементов 64, расположенных с угловым смещением друг от друга, как показано на фиг.6. Каждый элемент размещен на соответствующем ему участке 62 в ведущем элементе 60 и в соответствующей ему V-образной канавке 54 первой дорожки 50. В данном случае, двигатель 40 также предназначен для приложения крутящего момента С2 к элементу 60 и обеспечивает нарушение заклинивания, созданного роликами 64. Эта конфигурация, в целом, позволяет распределить более равномерно в тангенциальном направлении силы, обеспечивающие заклинивание первой и второй дорожек.
Кроме того, наряду с тем, что блокирующий элемент 64, предпочтительно, является роликом, а поверхности A1, A2, B1, B2, с которыми он взаимодействует, по существу, являются плоскими поверхностями, в альтернативных вариантах осуществления изобретения блокирующий элемент может представлять собой шар, а поверхности A1, A2, B1, B2 могут быть сферическими.
Обращаясь к фиг.7 следует отметить, что может быть использована конструкция, в которой первая дорожка 50 принадлежит внутреннему кольцу 52, а вторая дорожка 56 принадлежит внешнему кольцу 58, в частности, когда система регулирования применяется для установки шага каждой отдельной лопасти воздушного винта. В таком случае, система 26 регулирования будет связана с каждой лопастью указанного воздушного винта.
В изобретении, которое описано, исключительно посредством не ограничивающих примеров, специалисты в данной области техники могут выполнить разнообразные модификации.
Настоящая группа изобретений относится к системе регулирования шага лопасти воздушного винта в авиационном газотурбинном двигателе. Система содержит: первую дорожку, соединенную с лопастью воздушного винта и обеспечивающую при вращении установку угла атаки указанной лопасти; вторую дорожку; ведущий элемент (60) для первой дорожки, размещенный между первой и второй дорожками и имеющий участок с угловым углублением; и по меньшей мере, один блокирующий элемент (64), предусмотренный между первой и второй дорожками, размещенный на указанном участке с угловым углублением ведущего элемента и в V-образной канавке первой дорожки. Элемент (64) может занимать нормальное центрированное положение, приводя первую и вторую дорожку в совместное вращение, и может занимать положение разблокировки, допуская смещение во вращении блока, содержащего первую дорожку, элемент (64) и элемент (60). Достигается упрощение конструкции при обеспечении регулировки для разблокировки лопастей и для изменения угла атаки лопастей, причем не требуется какой-либо отдельный блокирующий механизм, что создает преимущества относительно массы, надежности и занимаемого пространства. 4 н. и 13 з.п. ф-лы, 7 ил.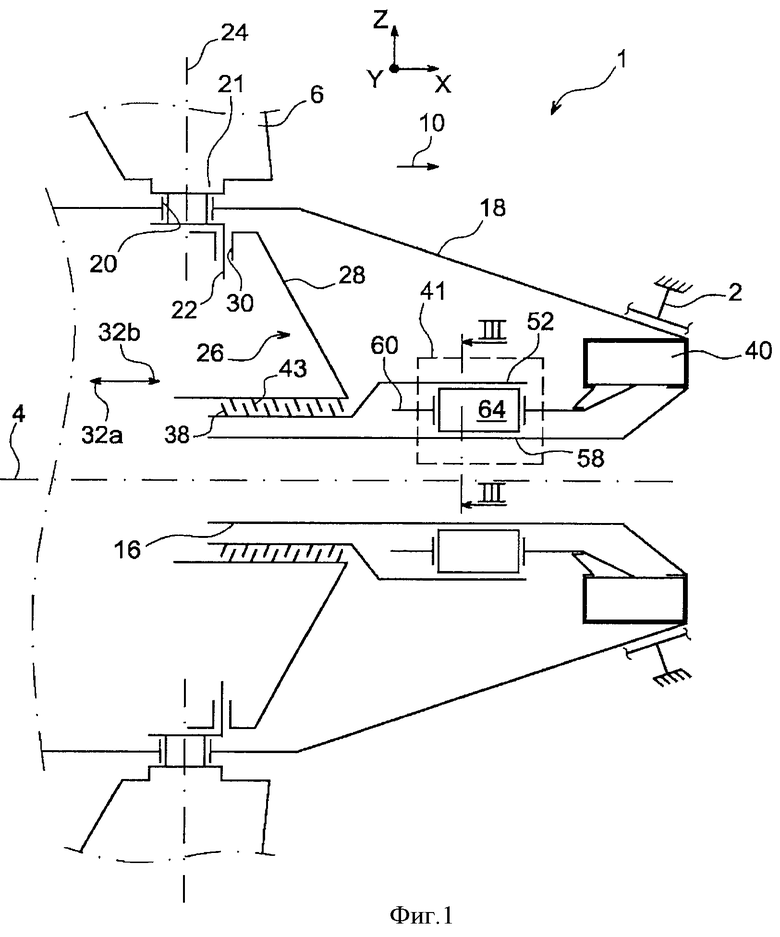
1. Система (26) регулирования шага лопасти воздушного винта авиационного газотурбинного двигателя, содержащая:
- первую кольцевую дорожку (50), предназначенную для связи с, по меньшей мере, с одной лопастью (6) воздушного винта, и обеспечивающую установку заданного угла атаки указанной лопасти, причем указанная первая дорожка, имеет, по меньшей мере, одну V-образную канавку (54), образованную двумя поверхностями (B1, B2);
- вторую кольцевую дорожку (56), концентричную первой дорожке;
- кольцевой ведущий элемент (60), расположенный между первой и второй дорожками концентрично последней, и имеющий, по меньшей мере, один участок (62) с угловым углублением, образованным двумя поверхностями (A1, A2), расположенными на расстоянии друг от друга; и
- по меньшей мере, один блокирующий элемент (64), установленный между первой и второй дорожками на указанном участке (62) с угловым углублением ведущего элемента и в V-образной канавке первой дорожки, характеризующаяся тем, что
указанный блокирующий элемент установлен с возможностью занимать:
- нормальное заклиненное положение, при котором с одной стороны он контактирует со второй дорожкой (56), будучи размещен между указанными двумя поверхностями (A1, A2) ведущего элемента на расстоянии от последнего, и с другой стороны контактирует с V-образной канавкой (54), причем аэродинамическая сила, действующая на лопасть воздушного винта при вращении, создает крутящий момент (С1) заданного направления на указанной первой дорожке, в результате чего, одна из указанных двух поверхностей (B1, B2) V-образной канавки, т.е. поверхность, наиболее отдаленная выше по ходу указанного заданного направления крутящего момента (С1), действует первой контактной силой (F1) на блокирующий элемент (64), и указанная вторая дорожка (56) действует возникающей силой (R) реакции на указанный блокирующий элемент (64), причем первая контактная сила (F1) и сила (R) реакции обеспечивают заклиненное положение первой и второй дорожек, обеспечивающее их совместное вращение; и
- положение разблокировки, при котором блокирующий элемент (64) находится в контакте с указанной поверхностью (B1) V-образной канавки, т.е. с поверхностью, наиболее отдаленной выше по ходу, а также с одной из двух поверхностей (A1, A2) ведущего элемента (60), причем положение разблокировки обеспечивается приложением к указанному ведущему элементу ведущего крутящего момента (С2), величина которого обеспечивает создание на указанных соответствующих поверхностях (A1, A2) второй контактной силы (F2), действующей на блокирующий элемент (64), которая является достаточной, чтобы противодействовать указанной силе (R) реакции указанной второй дорожки (56), приложенной к указанному блокирующему элементу (64), и также нарушить указанное заклиненное положение, при этом в указанном положении разблокировки обеспечивается поворот в направлении крутящего момента (С2) указанной первой дорожки (50), указанного блокирующего элемента (64) и указанного ведущего элемента (60), относительно второй дорожки.
2. Система регулирования по п.1, отличающаяся тем, что содержит упругое возвратное устройство, соединенное с указанным ведущим элементом, и обеспечивающее, при отсутствии приложения к нему крутящего момента (С2), поворот указанного ведущего элемента относительно указанной первой дорожки (50) и возврат его в нормальное заклиненное положение.
3. Система регулирования по п.1 или 2, отличающаяся тем, что указанная первая дорожка размещена снаружи, относительно указанной второй дорожкой.
4. Система регулирования по п.1 или 2, отличающаяся тем, что указанная вторая дорожка размещена снаружи, относительно указанной первой дорожкой.
5. Система регулирования по п.1, отличающаяся тем, что содержит приводной двигатель (40), управляющий вращением указанного ведущего элемента (60).
6. Система регулирования по п.1, отличающаяся тем, что указанный блокирующий элемент (64) является роликом, а взаимодействующие с ним указанные поверхности (A1, A2, B1, B2) являются, по существу, плоскими поверхностями.
7. Система регулирования по п.1, отличающаяся тем, что указанный блокирующий элемент (64) является шаром, а взаимодействующие с ним указанные поверхности (A1, A2, B1, B2), являются, по существу, сферическими поверхностями.
8. Система регулирования по п.1, отличающаяся тем, что она содержит несколько блокирующих элементов (64), расположенных на расстоянии друг от друга в окружном направлении, каждый из которых расположен на соответствующем участке с угловым углублением ведущего элемента и в соответствующей ему V-образной канавке первой дорожки.
9. Система регулирования по п.1, отличающаяся тем, что она предназначена для регулировки одной лопасти воздушного винта газотурбинного двигателя.
10. Система регулирования по п.1, отличающаяся тем, что она предназначена для регулировки одновременно нескольких лопастей воздушного винта газотурбинного двигателя.
11. Система регулирования по п.10, отличающаяся тем, что содержит скользящий элемент (28), предназначенный для взаимодействия с лопастями (6) таким образом, что при его смещении указанные лопасти приближаются или отдаляются от положения, соответствующего минимальному углу атаки, причем указанный скользящий элемент управляется средством регулирования (38), преобразующим вращательное движение в поступательное указанного элемента (28), при этом указанные средства регулирования (38) установлены с возможностью вращения совместно с указанной первой дорожкой (50).
12. Воздушный винт для авиационного газотурбинного двигателя, содержащий, по меньшей мере, одну систему (26) регулирования шага лопасти по любому из предшествующих пунктов.
13. Воздушный винт по п.12, отличающийся тем, что содержит
ротор (18) воздушного винта, предназначенный для вращения относительно статора вокруг продольной оси воздушного винта,
несущие лопасти (6),
указанную систему (26) регулирования шага лопастей, обеспечивающую их перемещение между положением, соответствующим минимальному углу атаки, и положением, соответствующим максимальному углу атаки, причем указанная система регулирования шага лопастей содержит перемещающийся вдоль продольной оси элемент (28), взаимодействующий с указанными лопастями таким образом, что при его смещении указанные лопасти приближаются или отдаляются от положения, соответствующего минимальному углу атаки, причем указанный скользящий элемент управляется средством регулирования (38), преобразующим вращательное движение в поступательное перемещение указанного элемента (28), относительно той же оси, при этом указанные средства регулирования (38) установлены с возможностью вращения совместно с указанной первой дорожкой (50), а вторая дорожка (56) вращается совместно с ведущим валом (16), несущим указанный ротор (18) воздушного винта, причем указанная система регулирования шага лопастей содержит приводной двигатель (40), обеспечивающий вращение указанного средства регулирования (38), связанное с указанным ведущим элементом (60).
14. Воздушный винт по п.13, отличающийся тем, что указанное средством регулирования (38) содержат шарико-винтовую передачу.
15. Воздушный винт по п.13 или 14, отличающийся тем, что указанный перемещающийся элемент (28) представляет собой конус, взаимодействующий со смещенным от центра пальцем (22) каждой из лопастей.
16. Авиационный турбинный двигатель, содержащий, по меньшей мере, один воздушный винт по любому из пп.12-15.
17. Способ управления системой регулирования шага лопасти воздушного винта в газотурбинном двигателе но любому из пп.1-11, отличающийся тем, что для изменения угла атаки лопасти, к указанному ведущему элементу прикладывают соответствующий крутящий момент.
| US 5779446 А, 14.07.1998 | |||
| US 5186608 A, 16.02.1993 | |||
| Устройство для реверсирования винта с автоматическим изменением шага | 1942 |
|
SU67587A1 |
| РЕВЕРСИВНЫЙ ВОЗДУШНЫЙ ВИНТ | 1998 |
|
RU2129075C1 |

