Настоящее изобретение относится к автомобильной системе рекомендаций для водителя и к способу уведомления водителя при эксплуатации автомобиля. Аспекты изобретения относятся к системе, способу и автомобилю.
В области автотранспорта известно, что в автомобиле предусмотрены различные подсистемы, которые могут функционировать в различных конфигурациях, чтобы приспосабливаться к различным условиям движения. В качестве примера, управление автоматической трансмиссией может осуществляться в различных режимах (например, спортивный, ручной, зимний или экономичный), в которых изменение между передаточными числами и другими управляющими параметрами подсистем изменяют так, чтобы приспособиться к условиям местности или стилю вождения водителя. Также известна, пневматическая подвеска, которая может работать в шоссейном режиме и в режиме бездорожья. Системы курсовой устойчивости могут применяться при сниженной активности, так чтобы предоставить водителю более непосредственное управление, а системы усиления рулевого управления могут применяться в различных режимах, чтобы обеспечить переменный уровень усиления в зависимости от условий движения.
Ранее заявителем было установлено, что богатство выбора является сложным и сбивающим с толку для водителя с точки зрения эффективности, безопасности и приятного вождения. В патенте данного заявителя US 7349776 описана система управления автомобилем, в котором водитель может осуществлять улучшенное управление в широком диапазоне условий вождения, и, в частности, в различных условиях местности, которые можно встретить, передвигаясь по бездорожью. В ответ на введенную водителем команду, касающуюся местности, автомобильную систему управления переключают в один из различных режимов вождения. Для каждого режима вождения различные подсистемы автомобиля функционируют подходящим образом, соответствующим местности.
К настоящему времени было установлено, что дополнительные усовершенствования автомобильной системы управления могли бы обеспечить более эффективное и приятное вождение для диапазона стилей вождения и возможностей водителя. Поэтому, цель настоящего изобретения заключается в том, чтобы предложить усовершенствование систем, в целом, вышеупомянутого типа. Другие цели и преимущества изобретения будут очевидны из последующего описания, формулы изобретения и чертежей.
В качестве существующего уровня техники, в документе WO 2009/066143 описано устройство для предъявления информации для автомобиля, в котором рекомендованное состояние управления для выбранного водителем режима передвижения сравнивают с рекомендованным состоянием управления для действительного режима передвижения. Если имеет место отклонение рекомендованного состояния управления от действительного состояния управления, то водителю предъявляют рекомендацию изменить состояние управления. Поэтому, способ включает в себя сравнение состояния управления, подходящего для заданного водителем режима передвижения, и действительного состояния управления при выработке рекомендации для водителя.
В аспектах изобретения предложена система, способ и автомобиль в соответствии с прилагаемой формулой изобретения.
В соответствии с другим аспектом изобретения, предложена система рекомендаций для водителя для автомобиля, имеющего, по меньшей мере, одну подсистему автомобиля; причем система рекомендаций для водителя содержит средство выбора, предназначенное для того, чтобы принимать, по меньшей мере, один индикатор условий вождения, и чтобы выбирать из множества установок предпочтительные установки, по меньшей мере, для одной подсистемы автомобиля. Предпочтительные установки могут быть выбраны в ответ на, по меньшей мере, один индикатор условий вождения. Система рекомендаций для водителя может дополнительно включать в себя средство индикации, предназначенное для предоставления водителю индикации предпочтительных установок, по меньшей мере, для одной подсистемы автомобиля. В ответ на получение индикации предпочтительных установок, водитель может действовать в соответствии с рекомендацией, чтобы выбрать предпочтительные установки, по меньшей мере, для одной подсистемы автомобиля.
Поэтому, в одном варианте осуществления система рекомендаций для водителя дополнительно включает в себя средство для получения от водителя, действующего в ответ на индикацию, входного сигнала, указывающего на предпочтительные установки.
Система рекомендаций для водителя дополнительно включает в себя средство управления, реагирующее на ввод водителя, и устроенное так, чтобы выбирать предпочтительные установки, по меньшей мере, для одной подсистемы автомобиля.
Водителю могут быть рекомендованы наиболее оптимальные установки для любой из подсистем автомобиля, например, для системы раздаточной коробки, тормозной системы, системы рулевого управления или системы акселератора, либо ему могут быть даны рекомендации для двух или более подсистем автомобиля, в зависимости от требуемого уровня сложности автомобиля.
Поэтому, в вариантах осуществления изобретения предложена система рекомендаций для водителя, которую можно использовать в ответ на один или несколько индикаторов условий вождения, чтобы предоставить водителю рекомендацию, касающуюся, по меньшей мере, одного набора установок для автомобиля. По меньшей мере, один набор установок для автомобиля может включать в себя, например, состояние раздаточной коробки и/или состояние дорожного просвета. По получении рекомендации водитель может осуществить выбор тех установок автомобиля, которые были определены как наиболее подходящие для конкретных условий вождения.
Система может дополнительно содержать средство выработки сигнала, из которого получают, по меньшей мере, один индикатор условий вождения. Например, средство выработки может включать в себя одну или несколько автомобильных систем детектирования и автомобильных систем датчиков.
По меньшей мере, один из индикаторов условий вождения можно получить из сигнала, являющегося признаком рельефа в непосредственной близости от автомобиля, над которой он передвигается (например, местность, непосредственно под колесами автомобиля). Как вариант, по меньшей мере, один из индикаторов условий вождения может быть получен из сигнала, являющегося признаком местности, окружающей окрестность автомобиля, над которой он собирается проехать. В другом варианте осуществления, по меньшей мере, один из индикаторов условий вождения получают из сигнала, показывающего стиль вождения транспортного средства (например, спортивный режим, экономичный режим).
Например, упомянутое средство выработки может включать в себя одну или несколько автомобильных систем детектирования и автомобильных систем датчиков. Автомобильная система детектирования может включать в себя одну или несколько камер, систему RADAR и систему LIDAR. Автомобильная система датчиков может включать в себя один или несколько датчиков скорости вращения колес, датчик температуры, датчик давления, гиродатчик для измерения отклонения, крена или наклона автомобиля, датчик скорости автомобиля, датчик крутящего момента двигателя, датчик продольного ускорения, датчик угла поворота рулевого колеса, датчик скорости поворота рулевого колеса, датчик уклона, датчик бокового ускорения, датчик положения педали тормоза, датчик положения педали газа и датчики продольного, бокового и/или вертикального движения.
Существенным является то, что в некоторых вариантах осуществления индикаторы условий вождения получают от системы или систем, предусмотренных в автомобиле. Это отличается от вышеупомянутых систем существующего уровня техники, в которых заданный пользователем ввод используют в качестве основы для сравнения, на основании которого водителю предоставляют рекомендацию.
В других вариантах осуществления изобретения индикаторы условий вождения могут соответствовать состоянию автомобильной системы управления, которое может представлять собой состояние, выбранное пользователем автомобиля.
Индикаторы условий вождения могут включать в себя один или несколько из следующих показателей: скорость автомобиля, неровность дороги, расстояние, пройденное по дороге с неровностью, поверхностное трение на колесах автомобиля, отклонение или положение автомобиля, крутящий момент двигателя автомобиля и температура окружающей среды.
В качестве примера, одна из подсистем автомобиля может представлять собой раздаточную коробку, и при этом установки для раздаточной коробки, из которых выбирают предпочтительные установки, включают в себя установки повышенной и пониженной передачи. В другом примере подсистема автомобиля может представлять собой селектор выбора режима стиля вождения, который позволяет осуществить выбор, например, из спортивного режима, стандартного режима или экономичного режима. Установки для селектора выбора режима стиля вождения, из которых выбирают предпочтительные установки, таким образом, могут включать в себя, по меньшей мере, один или несколько из следующих режимов: спортивный режим, экономичный режим и стандартный режим.
Система рекомендаций для водителя может дополнительно включать в себя средство получения сигнала, показывающего скорость автомобиля; средство сравнения сигнала, показывающего скорость автомобиля, с заданной пороговой скоростью автомобиля, выше которой установка пониженной передачи неуместна; и средство подавления средства индикации в случае, когда предпочтительные установки представляют собой установку пониженной передачи, а скорость автомобиля превышает заданную пороговую скорость автомобиля.
В другом примере одна из подсистем автомобиля может представлять собой систему пневматической подвески, и при этом установки для системы пневматической подвески, из которых выбирают предпочтительные установки, включают в себя установки дорожного просвета для бездорожья, промежуточные и шоссейные. Система рекомендаций для водителя может дополнительно включать в себя средство получения сигнала, показывающего скорость автомобиля; средство сравнения сигнала, показывающего скорость автомобиля, с заданной пороговой скоростью автомобиля, выше которой установка дорожного просвета повышенной проходимости неуместна; и средство подавления средства индикации в случае, когда предпочтительные установки представляют собой установку дорожного просвета для бездорожья, а скорость автомобиля превышает заданную пороговую скорость автомобиля.
В одном варианте осуществления средство выбора также принимает сигнал состояния прицепа, при этом предпочтительные установки для каждой из подсистем автомобиля также определяют в ответ на сигнал состояния прицепа.
Средство индикации может включать в себя устройство визуального отображения (например, ЖК-экран или прибор для проекции на лобовое стекло) и/или звуковое устройство и/или кинестетическое устройство, посредством которого водителю транспортного средства сообщают информацию, относящуюся к предпочтительным установкам.
В соответствии с еще одним аспектом изобретения, предложена автомобильная система управления, по меньшей мере, для одной подсистемы автомобиля, причем автомобильная система управления содержит систему рекомендаций для водителя в соответствии с предыдущим аспектом изобретения. Автомобильная система управления может дополнительно включать в себя контроллер подсистемы, предназначенный для управления, по меньшей мере, одной подсистемой автомобиля в нескольких режимах управления подсистемами, каждый из которых соответствует одному или нескольким различным условиям вождения автомобиля, и вычислительное средство для вычисления, по меньшей мере, одного из индикаторов условий вождения, чтобы определить, насколько подходит каждый из режимов управления подсистемами, и чтобы предоставить вывод, показывающий наиболее предпочтительный режим управления подсистемами.
Автомобильная система управления может дополнительно содержать автоматическое средство управления, функционирующее в режиме автоматического отклика, чтобы выбирать режим управления подсистемами в зависимости от выхода.
Вычислительное средство может, предпочтительно, принимать форму программно реализованного вычислительного средства в виде процессора, расположенного в автомобильном блоке управления автомобильной системы управления.
В одном варианте осуществления вычислительное средство устроено так, чтобы определять вероятность того, что каждый из режимов управления подсистемами является подходящим, и при этом вычислительное средство предоставляет вывод, показывающий режим управления подсистемами, имеющий наибольшую вероятность.
Каждая из подсистем автомобиля, для которой система рекомендаций для водителя предоставляет рекомендацию, может быть, но не обязательно, такой же, как и каждая из подсистем автомобиля, которую выбирают в режиме автоматического отклика.
Каждые из условий вождения, которым соответствуют режимы управления подсистемами, характерны, по меньшей мере, для одного из следующего: типа местности или стиля вождения транспортного средства (например, спортивный режим, экономичный режим).
В одном варианте осуществления этого аспекта изобретения система рекомендаций для водителя может также использоваться в ответ на выходной сигнал, показывающий режим управления подсистемами, который является наиболее подходящим, например, имеющий наибольшую вероятность быть подходящим.
Автомобильная система управления может дополнительно включать в себя средство переключения, предназначенное для того, чтобы сделать возможным переключение между режимом автоматического отклика, в котором автоматическое средство управления автоматически управляет подсистемами автомобиля в зависимости от выходного сигнала, и ручным режимом, в котором режим управления соответствующей подсистемой водитель выбирает вручную.
Система рекомендаций для водителя может также использоваться для того, чтобы обеспечить индикацию для водителя, чтобы он переключился в режим автоматического отклика, если в ручном режиме водителем был выбран режим управления подсистемами, несовместимый с режимом управления подсистемами, выбранным в зависимости от выходного сигнала.
По меньшей мере, одна подсистема автомобиля может включать в себя один или несколько из следующих элементов: систему управления двигателем, контроллер рулевого управления, контроллер тормоза, контроллер трансмиссии и контроллер подвески.
В соответствии еще с одним аспектом изобретения, предложен способ предоставления рекомендаций водителю транспортного средства, содержащего одну или несколько подсистем, причем способ содержит следующее: получают, по меньшей мере, один индикатор условий вождения для автомобиля; из множества наборов установок выбирают предпочтительные установки для одной или нескольких подсистем автомобиля в ответ на, по меньшей мере, один индикатор условий вождения; и предоставляют водителю индикацию предпочтительных установок для одной или нескольких подсистем автомобиля.
В соответствии с еще одним аспектом изобретения, предложен автомобиль, у которого имеется система рекомендаций для водителя в соответствии с предыдущим аспектом изобретения.
В рамках объема этого изобретения предусматривается, что различные аспекты, варианты осуществления, примеры и альтернативы и, в частности, их признаки, изложенные в предыдущих абзацах, в формуле изобретения и/или в последующем описании и на чертежах, могут быть приняты независимо или в любом их сочетании. Например, признаки, описанные применительно к одному варианту осуществления, применимы ко всем вариантам осуществления, если только такие признаки не являются несовместимыми.
Изобретение поясняется чертежами, на которых представлено следующее:
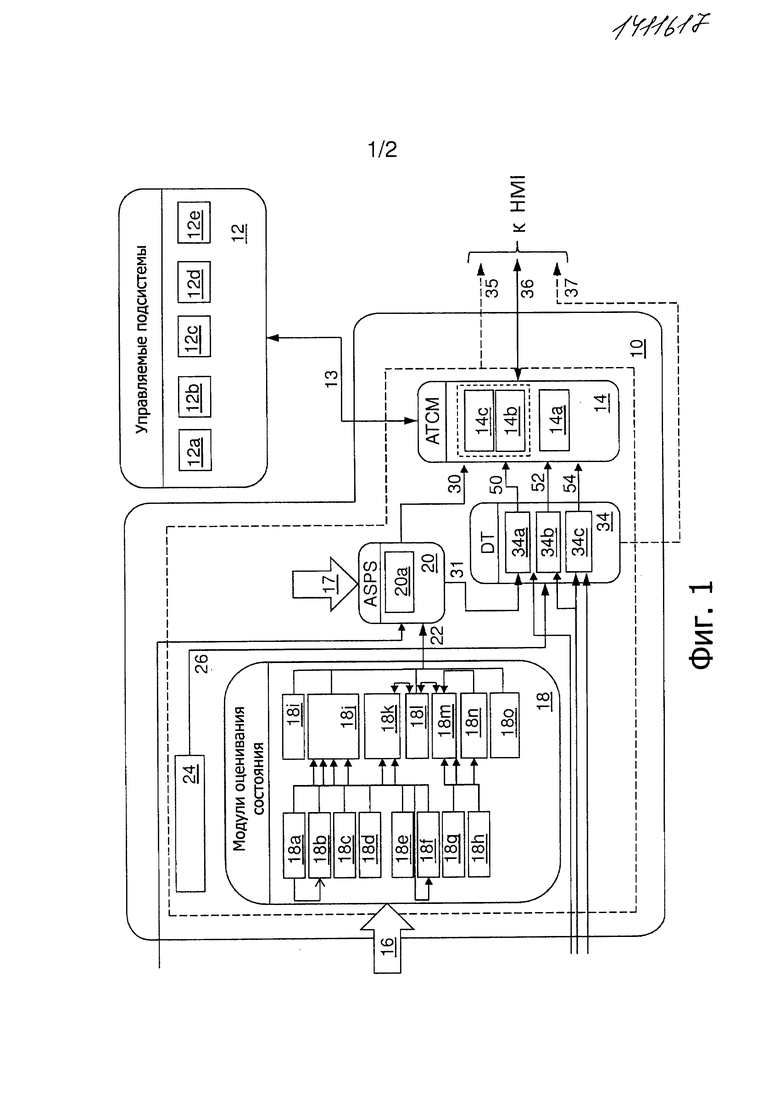
фиг. 1 - блок-схема, изображающая автомобильную систему управления, включающую в себя различные подсистемы автомобиля, управляемые автомобильной системой управления;
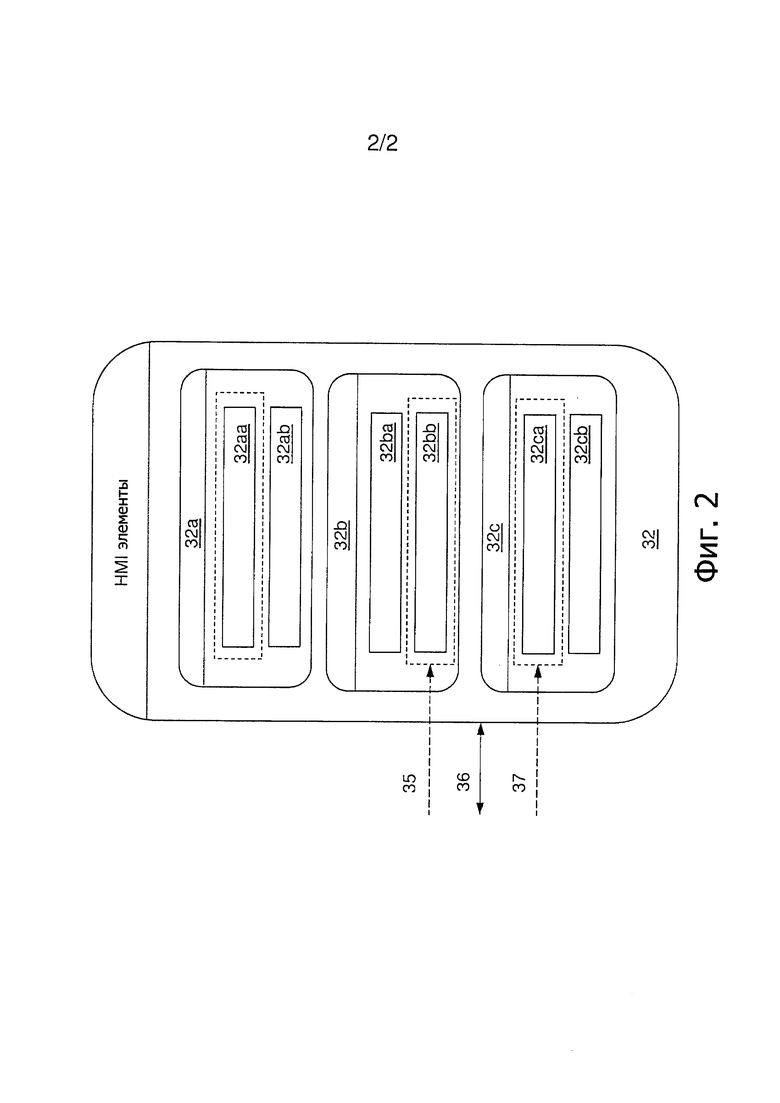
фиг. 2 - детально представлена блок-схема элементов человеко-машинного интерфейса (HMI), образующих часть автомобильной системы управления, показанной на фиг. 1.
На фиг. 1 и 2 показан автомобильный блок 10 управления (VCU) для автомобиля, относительно которого предполагают, что он пригоден для бездорожья, то есть для использования вне шоссе. VCU 10 управляет множеством подсистем 12 автомобиля, включая, но, не ограничиваясь, систему 12а управления двигателем, системой 12b трансмиссии, систему 12c рулевого управления, тормозную систему 12d и систему 12е подвески. Хотя показано, что под управлением VCU 10 находится пять подсистем, на практике в автомобиле может иметься большее число подсистем, которые могут находиться под управлением VCU 10. VCU 10 включает в себя модуль 14 управления подсистемами (АТСМ), который передает управляющие сигналы через линию 13 к каждой из подсистем автомобиля, чтобы осуществлять управление подсистемами соответствующим условиям вождения, таким как поверхность, по которой перемещается автомобиль (называемыми рельефными условиями) образом. Подсистемы 12 также поддерживают связь с модулем 14 управления подсистемами через сигнальную линию 13, для передачи информации обратной связи о состоянии подсистемы.
VCU 10 принимает множество сигналов, в общем, показанных ссылочными позициями 16 и 17, поступающих от множества датчиков автомобиля и представляющих многообразие различных параметров, связанных с движением автомобиля и его состоянии. Как более подробно описано ниже, сигналы 16, 17 предоставляют, или их используют для вычисления, множества индикаторов условий вождения (также называемых индикаторами рельефа), которые показывают сущность условий, в которых передвигается автомобиль. Один выгодный признак изобретения заключается в том, что VCU 10 определяет наиболее подходящий режим управления для различных подсистем, исходя из индикаторов рельефа, и соответственно автоматически управляет подсистемами.
Датчики (не показаны) на автомобиле включают в себя, но, не ограничиваясь, датчики, которые предоставляют VCU 10 непрерывные выходные сигналы 16, включая датчики скорости поворота рулевого колеса, датчик температуры окружающей среды, датчик атмосферного давления, датчик давления в шинах, датчики, такие как гиродатчики для измерения отклонения, крена или наклона автомобиля, датчик скорости автомобиля, датчик продольного ускорения, датчик крутящего момента двигателя (или модуль оценивания крутящего момента двигателя), датчик угла поворота рулевого колеса, датчик уклона (или модуль оценивания уклона), датчик бокового ускорения системы курсовой устойчивости (SCS), датчик положения педали тормоза, датчик положения педали газа и датчики продольного, бокового и/или вертикального движения.
В других вариантах осуществления может применяться только часть вышеупомянутых датчиков.
VCU 10 также принимает сигнал от блока электроусилителя рулевого управления (блок ePAS) автомобиля, показывающий рулевое усилие, которое прикладывают к колесам (рулевое усилие, прикладываемое водителем, в сочетании с рулевым усилием, прикладываемым системой ePAS).
Автомобиль также оборудован множеством датчиков, которые предоставляют VCU10 дискретные выходные сигналы 17, включая сигнал о состоянии системы автоматического поддержания скорости (ВКЛ/ВЫКЛ), сигнал о состоянии раздаточной коробки (установлена ли повышенная передача или пониженная передача), сигнал о состоянии системы контроля спуска с горы (HDC) (ВКЛ/ВЫКЛ), сигнал о состоянии соединения с прицепом (ВКЛ/ВЫКЛ), сигнал, показывающий, что была активирована система курсовой устойчивости (SCS) (ВКЛ/ВЫКЛ), сигнал стеклоочистителей (ВКЛ/ВЫКЛ), состояние пневматической подвески (поднятая/высокая, нормальная, низкая) и сигнал системы динамической стабилизации (DSC) (ВКЛ/ВЫКЛ).
Автомобиль также может быть оборудован одной или несколькими автомобильными системами детектирования (не показаны на сопровождающих фигурах) в виде системы камер, системы RADAR или системы LIDAR. Система камер, например, может включать в себя одну или несколько камер, которые образуют часть автомобильной системы помощи при парковке. Как вариант, камеры могут быть выполнены для того, чтобы обеспечить индикацию сущности рельефа в окружающей окрестности автомобиля, но не обязательно непосредственно под колесами автомобиля. Дополнительные примеры использования данных с камер в настоящем изобретении будут более подробно описаны ниже.
VCU 10 включает в себя вычислительное средство в виде модуля 18 оценивания и средство вычисления и выбора в виде селекторного модуля 20. Изначально непрерывные сигналы 16 от датчиков подают на модуль 18 оценивания, в то время как дискретные сигналы 17 подают на селекторный модуль 20.
Модуль 18 оценивания содержит несколько модулей оценивания, предназначенных для определенных аспектов поведения автомобиля и автомобильных подсистем. В показанном примере эти модули содержат: модуль 18а оценки ускорения колес; модуль 18b оценки инерционного момента колес; модуль 18с оценки продольного усилия автомобиля; модуль 18d оценки аэродинамического сопротивления; модуль 18е оценки продольного усилия на колесах; модуль 18f определения пробуксовки колес; модуль 18g оценки бокового ускорения; модуль 18h оценки отклонения автомобиля; модуль 18i определения изменения скорости колес и неровности; модуль 18j оценки поверхностного сопротивления качению; модуль оценки 18k продольной пробуксовки колес или “момента трогания”; модуль 18l проверки поверхностного трения или правдоподобия “мю”; модуль 18m оценки бокового поверхностного трения или оценки “мю/определение колеи; модуль 18n оценки рулевого усилия и модуль 18o оценки определения неровности.
В первом каскаде модуля 18 оценивания различные выходные сигналы 16 датчиков используют, чтобы получить некоторое число индикаторов рельефа. В первом каскаде модуля 18 оценивания скорость автомобиля получают, исходя из показаний датчиков скорости колес, ускорение колеса определяют, исходя из показаний датчиков ускорения колес, продольное усилие на колесах определяют, исходя из показаний датчиков продольного ускорения автомобиля, а крутящий момент, при котором возникает пробуксовка (если возникает пробуксовка колес) определяют, исходя из показаний датчиков движения, определяя отклонение, наклон и крен. Другие вычисления, выполняемые в первом каскаде модуля 18 оценивания, включают в себя вычисление инерционного крутящего момента колес (крутящий момент, связанный с ускорением или замедлением инерционной массы колес), “непрерывности движения” (оценка того, начинает ли автомобиль движение или останавливается, например, как в случае, когда автомобиль передвигается по каменистой местности), аэродинамического сопротивления, отклонения и бокового ускорения автомобиля.
Модуль 18 оценивания также включает в себя второй каскад, в котором вычисляют следующие индикаторы рельефа: поверхностное сопротивление качению (исходя из инерционного крутящего момента колес, продольного усилия автомобиля, аэродинамического сопротивления и продольного усилия на колесах), рулевое усилие на рулевом колесе (исходя из бокового ускорения и выходного сигнала от датчика рулевого колеса), продольная пробуксовка колес (исходя из продольного усилия на колесах, ускорения колес, активности SCS и сигнала, показывающего, возникла ли пробуксовка колес), боковое трение (вычисляют на основании измеренного бокового ускорения и отклонения по отношению к предсказанному боковому ускорению и отклонению) и определение неровности (высокочастотное, низкоамплитудное колебание высоты колес, показывающее поверхности типа стиральной доски).
Сигнал активности SCS получают от нескольких выходных сигналов электронного управляющего блока (ECU) систем курсовой устойчивости (SCS) (не показаны), который обладает функцией DSC (контроль динамической стабильности), функцией ТС (регулирование тягового усилия), выполняет алгоритмы ABS (антиблокировочной системы) и HDC (контроля спуска с горы), показывающих состояние активности DSC, ТС, ABS, воздействие тормозной системы на отдельные колеса и запросы от ECU SCS к двигателю на уменьшение крутящего момента двигателя. Все эти сигналы показывают, что возникла пробуксовка, и что ECU SCS выполнил действия по регулированию. Модуль 18 оценивания также использует выходные сигналы от датчиков скорости колес, чтобы определить изменение скорости колес, и сигнал об определении неровности.
На основании сигнала стеклоочистителей (ВКЛ/ВЫКЛ) модуль 18 оценивания также вычисляет, как долго находились стеклоочистители во включенном состоянии (т.е. сигнал продолжительности дождя).
VCU 10 также включает в себя модуль 24 определения неровности дороги, предназначенный для определения неровности/волнистости местности, исходя из показаний датчиков пневматической подвески (датчиков высоты дорожного просвета) и акселерометров колес. Сигнал индикаторов рельефа в виде выходного сигнала 26 неровности представляет собой выходной сигнал из модуля 24 определения неровности дороги. В дополнение или в качестве альтернативы, на модуль 24 определения неровности дороги соответствующим детектирующим средством, таким как датчики хода подвески, как например, датчики бесступенчатого регулирования демпфирования (CDV), могут подаваться данные об артикуляции колес.
В качестве проверки правдоподобия в модуле 18 оценивания сравнивают друг с другом оценки продольной пробуксовки колес и оценку бокового трения.
Вычисления для изменения скорости колес и выходного значения неровности, оценка поверхностного сопротивления качению, определение продольной пробуксовки и неровности, вместе с проверкой правдоподобия трения представляют собой выходной сигнал от модуля 18 оценивания и обеспечивают выходные сигналы 22 индикатора рельефа, показывающие сущность местности, по которой передвигается автомобиль, и предназначенные для дальнейшей обработки в VCU 10.
Сигналы 22 индикатора рельефа от модуля 18 оценивания передают на селекторный модуль 20 для определения того, какой из нескольких режимов управления подсистемами автомобиля является наиболее подходящим, исходя из индикаторов типа местности, по которой передвигается автомобиль. Селекторный модуль 20 служит в качестве автоматического селектора специальной программы (ASPS) и содержит алгоритм автоматического селектора специальной программы (ASPS) или вероятностный алгоритм 20а. Наиболее подходящий режим управления определяют, анализируя вероятность того, что каждый из различных режимов управления является подходящим, исходя из сигналов 22, 26 индикатора рельефа, поступающих от модуля 18 оценивания и модуля 24 определения неровности дороги.
Управление подсистемами 12 автомобиля может осуществляться автоматически (“автоматический режим”) в ответ на выходной сигнал 30 управления от селекторного модуля 20 и без необходимости ввода, осуществляемого водителем. Как вариант, управление подсистемами 12 автомобиля может осуществляться в ответ на ручной ввод водителя (“ручной режим”) через модуль человеко-машинного интерфейса (HMI) (не показан на фиг. 1).
При работе в автоматическом режиме выбор наиболее подходящего режима управления подсистемами осуществляют посредством трехэтапного процесса:
(1) для каждого типа режима управления, исходя из индикаторов рельефа, выполняют вычисление вероятности того, что данный режим управления пригоден для местности, по которой передвигается автомобиль;
(2) интегрируют “положительные разности” между вероятностью текущего режима управления и других режимов управления; и
(3) выполняют программный запрос к модулю 14 управления, когда интегрированное значение превосходит заданный порог, или когда вероятность текущего режима управления равна нулю.
Теперь более подробно будут описаны отдельные шаги этапов (1), (2) и (3).
На этапе (1) непрерывные сигналы индикатора рельефа в виде выходного сигнала 26 неровности поверхности дороги и выходных сигналов 22 от модуля 18 оценивания поступают на селекторный модуль 20. Селекторный модуль 20 также принимает дискретные индикаторы 17 рельефа непосредственно от различных датчиков в автомобиле, включая сигнал состояния раздаточной коробки (установлена ли высокая передача или пониженная передача), сигнал о состоянии DSC, сигнал о состоянии системы автоматического поддержания скорости (включена ли система автоматического поддержания скорости автомобиля или нет) и сигнал о состоянии прицепа (присоединен ли прицеп к автомобилю или нет). Сигналы индикатора рельефа, показывающие температуру окружающей среды и атмосферное давление, также подают на селекторный модуль 20.
Вероятностный алгоритм 20а для вычисления наиболее подходящего режима управления подсистемами автомобиля основан на дискретных сигналах 17 индикатора рельефа, получаемых непосредственно от датчиков, и непрерывных индикаторах 22, 26 рельефа, вычисляемых модулем 18 оценивания и модулем 24 определения неровности поверхности дороги, соответственно.
Режимы управления обычно включают в себя режим управления трава/гравий/снег (режим GGS), пригодный, когда автомобиль передвигается по траве, гравию или по снегу, режим управления грязь/колея (режим MR), пригодный, когда автомобиль передвигается по грязи или по колее, режим каменистая насыпь/галька (режим RB), подходящий, когда автомобиль передвигается по каменистой местности, такой как каменистое поле, режим песок (режим Sand), который пригоден, когда автомобиль передвигается по песчаной местности (или по глубокому мягкому снегу) и режим выключенных специальных программ (режим SP OFF), который представляет собой компромиссный режим, или общий режим, подходящий для всех условий местности и особенно для автомобиля, передвигающегося по автомагистралям и обычным шоссе.
Различные типы местности сгруппированы в соответствии с трением поверхности и ее неровности. Например, целесообразно сгруппировать траву, гравий и снег как поверхности, обеспечивающие малое трение и сравнительно гладкую поверхность, а также целесообразно сгруппировать каменистые поверхности и поверхности с булыжниками, так как их можно охарактеризовать сравнительно высоким трением и очень сильной неровностью.
Для каждого режима управления подсистемами алгоритм 20а в селекторном модуле 20 выполняет вычисление вероятности, исходя из индикаторов рельефа, чтобы определить вероятность того, что каждый из различных режимов управления является подходящим. Селекторный модуль 20 включает в себя настраиваемую карту данных, которая соотносит непрерывные индикаторы 22, 26 рельефа (например, скорость автомобиля, неровность дороги, угол поворота управляемых колес) с вероятностью того, что конкретный режим управления является подходящим. Каждое значение вероятности обычно принимает значение от 0 до 1. Так, например, вычисление скорости автомобиля может дать вероятность 0,7 для режима RB, если скорость автомобиля сравнительно низка, в то время как, если скорость автомобиля сравнительно высока, то вероятность режима RB будет намного ниже (например, 0,2). Это происходит поскольку менее вероятно, что высокая скорость автомобиля показывает, что он перемещается по каменистой местности.
Кроме того, для каждого режима управления подсистемами каждый из дискретных индикаторов 17 рельефа (например, состояние присоединения прицепа (ВКЛ/ВЫКЛ), состояние системы автоматического поддержания скорости (ВКЛ/ВЫКЛ)) также используют для вычисления соответствующей вероятности для каждого из режимов управления GGS, RB, Sand, MR или SP OFF. Так, например, если система автоматического поддержания скорости включена водителем автомобиля, то вероятность того, что режим SP OFF является подходящим, сравнительно высока, в то время как вероятность того, что подходящим является режим управления MR, сравнительно низка.
Для каждого из различных режимов управления подсистемами вычисляют значение совместной вероятности Pb, исходя из отдельных вероятностей соответствующих режимов управления, как описано выше, полученных из непрерывных и дискретных индикаторов 17, 22, 26 рельефа. В представленном ниже уравнении индивидуальная вероятность для каждого режима управления, определенная для каждого индикатора рельефа, обозначена через a, b, c, d,…,n. Тогда, значение совместной вероятности РЬ для каждого режима управления вычисляют следующим образом:
Pb=(a.b.c.d…n)/((a.b.c.d…n)+(1-а).(1-b).(1-c).(1-d)…(1-n))
На вход вероятностного алгоритма 20а может быть подано любое число индивидуальных вероятностей, и любое из значений вероятности, поступившее на вход вероятностного алгоритма, само может быть выходом функции вычисления совместной вероятности.
Как только для каждого режима управления было вычислено значение совместной вероятности, в селекторном модуле 20 выбирают программу управления подсистемами, соответствующую режиму управления с наибольшей вероятностью, а выходной сигнал 30, обозначающий ее, подают на модуль 14 управления подсистемами. Преимущество использования функции вычисления совместной вероятности, исходя из множества индикаторов рельефа, заключается в том, что отдельные индикаторы при их сочетании могут сделать некоторый режим управления (например, GGS или MR) более или менее вероятным по сравнению с ситуацией, когда выбор осуществляют, только исходя из одного индикатора рельефа.
Дополнительный сигнал 31 управления из селекторного модуля 20 поступает в систему рекомендаций для водителя, выполненную в виде блока инструктора для водителя (DT) или модуля 34 рекомендаций водителю, чтобы запустить процедуры инструктирования водителя, как более подробно описано ниже. Модуль 34 рекомендаций для водителя получает данные от множества подсистем автомобиля, относящихся к состоянию и поведению автомобиля, и содержит несколько элементов, относящихся к ключевым функциям, например: автоотклик 34а; установки высоты подвески и/или давления 34b; и установки передаточного числа раздаточной коробки 34c.
На этапе (2) в селекторном модуле (20) непрерывно выполняют процесс интегрирования, чтобы определить, нет ли необходимости переключиться с текущего режима управления на один из альтернативных режимов управления.
Первый шаг процесса интегрирования заключается в том, чтобы определить, есть ли положительная разность между значением совместной вероятности для каждого из альтернативных режимов управления по сравнению со значением совместной вероятности для текущего режима управления.
В качестве примера, предположим, что текущим режимом управления является GGS со значением совместной вероятности 0,5. Если значение совместной вероятности для режима управления Sand равна 0,7, то между двумя вероятностями вычисляют положительную разность (т.е. значение положительной разности равно 0,2). Значение положительной разности интегрируют с течением времени. Если разность остается положительной, и интегрированное значение достигает заданного порога переключения (называемого порогом переключения), или одного из нескольких заданных порогов переключения, то селекторный модуль 20 определяет, что текущий режим управления (GSS) следует переключить на новый, альтернативный режим управления (в этом примере, на режим управления Sand). Затем, из селекторного модуля 20 выходит управляющий выходной сигнал 30 и поступает на модуль 14 управления подсистемами, чтобы включить режим управления Sand для подсистем автомобиля.
На этапе (3) отслеживают разность вероятностей и, если в любой момент процесса интегрирования разность вероятностей изменяется от положительного значения на отрицательное значение, то процесс интегрирования прекращается и сбрасывается в ноль. Аналогично, если интегрированное значение для одного из других альтернативных режимов управления (например, отличных от режима Sand) достигает заданного порога переключения до результирующей вероятности для режима управления Sand, то процесс интегрирования для режима управления Sand прекращают и сбрасывают в ноль, и выбирают альтернативный режим управления с более высокой разностью вероятностей.
Если требуется высокая скорость отклика, то одним из последствий может быть то, что выполняется большое число смен режима управления с большой частотой. В некоторых обстоятельствах большое число смен может быть неподходящим или избыточным. На частоту смены режима управления влияют два элемента калибровочного процесса: значения совместных вероятностей для каждого из режимов управления и порог интегрированной положительной разности для осуществления смены (порог переключения). Задача, связанная с частыми сменами режима управления, может быть решена одним из двух способов. Если порог переключения установить сравнительно высоким, то для переключения любого режима управления на другой потребуется больше времени. Такая стратегия повлияет на переключения всех режимов управления. Как вариант, если гарантировать, что между значениями вероятности карты данных для различных режимов управления имеется небольшая разность, например, если установить все значения близкими к 0,5, то выполнение смены режима управления займет больше времени по сравнению с ситуацией, когда разность большая. Если требуется, то эту стратегию можно применить для того, чтобы повлиять на скорость отклика в отношении только избранных индикаторов рельефа и режимов управления.
Разность вероятностей между текущим режимом управления и всеми другими режимами управления непрерывно отслеживают, а интегрированное значение для каждого режима управления непрерывно сравнивают с заданным порогом переключения. Заданный порог переключения калибруют автономно, до того, как автомобиль начнет движение, и сохраняют в памяти селекторного модуля 20.
Предпочтительно, чтобы заданный порог переключения изменялся в соответствии с индикатором рельефа для неровности поверхности. Таким образом, можно изменить частоту, с которой меняется режим управления подсистемами, в зависимости от неровности местности, по которой передвигается автомобиль. Например, если автомобиль передвигается по дороге (например, по обычной гладкой поверхности дороги), на которой неровность поверхности низкая, то порог переключения устанавливают в сравнительно высокое значение, так что значение интегрированной разности дольше достигает порогового значения, и поэтому режим управления переключается менее часто. Это позволяет предотвратить изменение режима управления, например, если автомобиль на небольшое время въезжает на обочину при прямой поездке по обычной дороге. Наоборот, если автомобиль передвигается по бездорожью, когда неровность поверхности высока, то порог переключения устанавливают в более низкое значение, так что режим управления меняется более часто, чтобы соответствовать естественным изменениям на местности, что обеспечивает подстройку под режим управления.
В предпочтительном варианте осуществления также может быть реализован один или несколько порогов переключения для сравнения со значением интегрированной разности, каждый из которых основан на различных индикаторах рельефа. Например, другой порог переключения может быть установлен в зависимости от сопротивления качению автомобиля. В этом случае значение интегрированной разности сравнивают с обоими порогами (один для неровности поверхности и один для сопротивления качению), и если первый из порогов пересечен, то инициируют смену режима управления.
Если получено, что совместная вероятность текущего режима управления становится равной нулю, то управляющий выходной сигнал 30 от селекторного модуля 20 передают на модуль 14 управления, чтобы реализовать один из других режимов управления, соответствующих режиму с наибольшей совместной вероятностью. В основном, этот режим переключения будет реализован для того, чтобы управляться с дискретными индикаторами рельефа, которые показывают, что больше не следует оставаться в текущем режиме управления. Например, если водитель выбирает автоматическое поддержание скорости, то модуль 14 управления подсистемами автоматически установит вероятность для режима MR и режима Sand, равную нулю. Это происходит потому, что, если автомобиль находится в режиме автоматического поддержания скорости, то подходящими режимами для подсистем автомобиля являются только режим GGS и режим SP OFF. Если в момент времени, когда водитель выбирает режим автоматического поддержания скорости, выбран режим RB, то вероятность режима RB сразу устанавливают равной нулю, и контроллер подсистемы сразу выбирает один из режимов управления с наибольшей вероятностью.
Другие индикаторы, которые могут быть использованы для ограничения числа режимов управления, “доступных” для выбора, включают в себя состояние ВКЛ/ВЫКЛ DSC (например, если DSC находится в состоянии ВЫКЛ, то автоматический режим работы не доступен), состояние прицепа и состояние раздаточной коробки (повышенная/пониженная передача).
Имеется множество обстоятельств, в которых процесс интегрирования будет остановлен, а текущее интегральное значение сохранено в памяти, вместо сбрасывания в ноль, как, например, следующие: (а) когда автомобиль передвигается обратным ходом; (b) для заданного расстояния передвижения вперед после движения задним ходом; (с) когда автомобиль находится в режиме парковки; (d) когда автомобиль передвигается со скоростью ниже определенной скорости; (е) когда автомобиль переключает передачу; (f) когда автомобиль тормозит с нулевой тягой; и (g) когда имеет место активное торможение. Например, для варианта (b), приведенного выше, селекторный модуль 20 может быть запрограммирован так, чтобы в случае, если получено, что наибольшей совместной вероятностью обладает режим RB, то процесс интегрирования начинается, как только автомобиль начинает движение вперед после движения задним ходом, вместо того, чтобы ждать на протяжении заданного расстояния.
Теперь более подробно будет описан модуль 14 управления подсистемами. Модуль 14 включает в себя три функции; функцию 14а валидации, управления ошибками и проверки, алгоритм 14b, допускающий переключение между автоматической работой и работой в ручном режиме (как более подробно описано ниже), и алгоритм 14c интерфейса для модуля HMI, чтобы поддерживать режим работы с автоматическим откликом. Модуль 32 HMI более подробно показан на фиг. 2.
Модуль 14 управления подсистемами выдает три выходных сигнала на модуль 32 HMI. Первый выходной сигнал 35 обеспечивает уведомление модуля 32 HMI о том, активен автоматический режим или ручной режим работы. Если активен автоматический режим работы, то выдают второй выходной сигнал 36, чтобы уведомить водителя, когда система “оптимизируется” и происходит переключение режима управления. Третий выходной сигнал 37 подают на модуль 32 HMI для инструктирования водителя, как описано ниже.
Со ссылкой на фиг. 2, модуль 32 HMI обеспечивает интерфейс между селекторным модулем 20 и водителем автомобиля и включает в себя селекторный переключатель 32а, модуль 32b передачи сообщений и модуль 32c высокоуровневой функции отображения (HLDF). В примере, показанном на фиг. 2, селекторный переключатель 32а включает в себя специальный аппаратный переключатель 32аа и распределительное устройство, содержащее или устроенное так, чтобы поддерживать существующую систему 32ab автомобиля. Модуль 32b передачи сообщений содержит: средство 32ba дисплейной связи, устроенное так, чтобы управлять и вырабатывать сообщения для дисплея приборной панели и осуществлять связь с другими соответствующими подсистемами автомобиля; и генератор 32bb рекомендаций для водителя, устроенный так, чтобы предоставлять подходящие сообщения водителю на дисплее приборной панели. Модуль 32c HLDF содержит модуль 32ca для информации обратной связи для водителя и модуль 32cb для поддерживания существующих основанных на HLDF систем и функциональности.
Модуль 32 HMI устроен так, чтобы позволить водителю автомобиля игнорировать автоматический режим и, если предпочтительно, выбирать ручной режим работы с помощью селекторного переключателя 32a. Модуль 32 HMI также предоставляет водителю рекомендации, касающиеся различных конфигураций автомобиля, включая установки для раздаточной коробки (повышенная или пониженная передача), высоту дорожного просвета пневматической подвески (поднятая/высокая, нормальная, низкая), и уведомления о том, когда желательно выбрать автоматический режим работы. Модуль 32c HLDF включает в себя несколько графических индикаторов (не показаны), предназначенных для того, чтобы показывать водителю, когда произошла смена выбранного режима управления подсистемами, если система работает в режиме автоматического отклика (т.е. исходя из второго выходного сигнала 36). Обычно, например, модуль 32c HLDF может показывать водителю текстовую индикацию типа “ОБНОВЛЕНИЕ РЕЖИМА УПРАВЛЕНИЯ”.
При запуске автомобиля система управления находится в автоматическом режиме, а селекторный модуль 20 непрерывно выполняет анализ вероятностей, описанный выше, чтобы решить, который из различных режимов управления является наиболее подходящим. Селекторный модуль 20 автоматически регулирует режим управления, так что для управления подсистемами автомобиля применяют режим, который является наиболее подходящим. В любое время водитель может преднамеренно отменить автоматический режим путем переключения системы в ручной режим работы с помощью селекторного переключателя 32a модуля 32 HMI.
Еще одна особенность изобретения заключается в том, что оно включает в себя модуль инструктирования водителя, или модуль 34 рекомендаций для водителя, который служит для того, чтобы предоставлять водителю инструкции, касающиеся различных конфигураций или установок автомобиля. Модуль 34 рекомендаций для водителя обеспечивает интерфейс между селекторным модулем 20 и модулем 32 HMI и предоставляет водителю сообщения с инструкциями или рекомендациями, касающимися установок пневматической подвески (высоты просвета автомобиля) и установок раздаточной коробки (повышенная/пониженная передача). Модуль 34 рекомендаций для водителя принимает входные сигналы от системы пневматической подвески (не показана) и от раздаточной коробки (также не показана), чтобы отобразить текущее состояние, а также принимает выходной сигнал 26 о неровности от модуля 24 определения неровности дороги. Другие индикаторы условий вождения (не показаны на фигурах) также могут быть направлены в модуль 34, например, пройденное расстояние при определенной неровности дороги, скорость автомобиля, поверхностное трение (с использованием определения пробуксовки SCS), уклон автомобиля, крутящий момент двигателя и температура окружающей среды. Эти индикаторы оказывают влияние на работу автомобиля во внешних условиях окружающей среды, и как таковые будут называться “индикаторами внешних условий вождения”.
Сигнал о состоянии прицепа (ВКЛ/ВЫКЛ) также может быть передан на модуль 34.
Кроме того, модуль принимает выходной сигнал 31 от селекторного модуля 20, чтобы показать, какой из режимов системы управления является наиболее подходящим, исходя из различных индикаторов рельефа. Модуль 34 рекомендаций для водителя включает в себя средство для сохранения предварительно составленных таблиц или карт данных и для определения наиболее подходящих установок (называемых предпочтительными установками) из множества подходящих установок автомобиля, в зависимости от различных индикаторов внешних условий вождения, которые он принимает, и, как вариант, сигнала о состоянии прицепа. Подходящие установки для автомобиля затем передают через три выхода 50, 52, 54 на модуль 14 управления подсистемами, а оттуда - на модуль 32 HMI.
Выходы от модуля 34 рекомендаций для водителя, подаваемые на модуль 14 управления подсистемами, включают в себя сигнал 54 установок раздаточной коробки, сигнал 52 установок пневматической подвески и сигнал 50 рекомендации автоматического режима. В модуле 14 управления подсистемами выполняют процесс 14а валидации или определения ошибок. Процесс 14а валидации и определения ошибок выполняют так, чтобы гарантировать, что, если одна из подсистем не поддерживает выбранный режим управления, например, из-за ошибки, то выполняют соответствующие действия (например, в виде предупреждения). Если валидация выполнена успешно, то на модуль 32 HMI через выход 36 передают индикацию подходящих установок раздаточной коробки (повышенная/пониженная передача) и подходящие установки подвески (поднятый, нормальный или низкий дорожный просвет), исходя из режима управления, для которого получилась наибольшая вероятность для текущих условий, и, исходя из различных индикаторов, которые принимает модуль 34. Затем, водитель может действовать с использованием селекторного переключателя 32а в соответствии с индикацией, предоставленной модулем 32 HMI, чтобы отрегулировать высоту дорожного просвета (высокая, нормальная, низкая) и/или раздаточную коробку (повышенная/пониженная передача) в соответствии с рекомендацией. Особенное преимущество заключается в том, что водителю предоставляют рекомендацию оптимальных установок для автомобиля, которые определяют, исходя из индикаторов текущих условий местности.
Сигнал 50 рекомендации автоматического режима также отправляют на модуль 14 управления подсистемами, так что, если система работает в ручном режиме, и определили, что одна или несколько конфигураций автомобиля для высоты дорожного просвета и установок раздаточной коробки являются неподходящими (как дополнительно обсуждается ниже), то посредством модуля 32 HMI водителю предоставляют индикацию того, что желательно выбрать автоматический режим работы. Тогда, при получении этой индикации водитель может с помощью селекторного переключателя 32а выбрать автоматический режим работы.
Далее приведен ряд примеров того, как может работать модуль 34 рекомендаций для водителя.
Пример 1
Модуль 34 рекомендаций для водителя советует водителю выбрать пониженную передачу раздаточной коробки, если автомобиль все время передвигается по неровной дороге. Эту рекомендацию называют “управление автомобилем при пониженной передаче раздаточной коробки”. Рекомендация основана на функции определения неровности дороги (как указано посредством сигнала 26) и расстоянии, пройденном при данной неровности дороги. Рекомендацию не дают, если уже выбрана пониженная передача, определено низкое поверхностное трение, автомобиль движется со скоростью, превышающей заданную пороговую скорость, выше которой установка пониженной передачи нецелесообразна, температура окружающей среды ниже порогового значения, при котором может возникнуть низкое поверхностное трение, или установлен сбой для любого критичного входного сигнала для данного компонента системы. Причина такой работы заключается в том, что на очень неровных дорогах, или при преодолении больших препятствий и элементов рельефа легче управлять скоростью автомобиля при пониженной передаче, чтобы можно было поддерживать стабильную низкую скорость, не используя постоянно педаль тормоза.
Пример 2
Модуль 34 рекомендаций для водителя советует водителю выбрать пониженную передачу раздаточной коробки, если автомобиль передвигается по периодически неровной дороге. Эта рекомендация основана на функции определения неровности дороги и расстоянии, пройденном при данной неровности дороги. Рекомендацию не дают, если уже выбрана пониженная передача, автомобиль движется со скоростью, превышающей заданную пороговую скорость, выше которой установка пониженной передачи нецелесообразна, определено низкое поверхностное трение, температура окружающей среды ниже порогового значения, при котором может возникнуть низкое поверхностное трение, или установлен сбой для любого критичного входного сигнала для данного компонента системы. Термин “периодически” в этом контексте означает, что неровность дороги не продолжается достаточно долго, чтобы активировать рекомендацию “управление автомобилем при пониженной передаче раздаточной коробки”, как ранее упоминалось в примере 1. Причина такой работы заключается в том, что на периодически неровных дорогах легче управлять скоростью автомобиля на неровных участках на пониженной передаче, чтобы можно было поддерживать стабильную скорость, не используя постоянно педаль тормоза. Эти условия являются обычными, например, на неровных сельских дорогах.
Пример 3
Модуль рекомендаций для водителя может работать так, чтобы рекомендовать установку пониженной передачи раздаточной коробки, чтобы увеличить крутящий момент, доступный на колесах, и чтобы тем самым защитить от неправильной эксплуатации трансмиссии. Эта рекомендация основана на функции определения крутящего момента двигателя и пробуксовки преобразователя крутящего момента, сигналы которых подают на модуль 34. Рекомендацию не дают, если уже выбрана пониженная передача, автомобиль движется со скоростью, превышающей заданную пороговую скорость, выше которой установка пониженной передачи нецелесообразна, определено низкое поверхностное трение, температура окружающей среды ниже порогового значения, при котором может возникнуть низкое поверхностное трение, или установлен сбой для любого критичного входного сигнала для данного компонента системы. Причина такой работы заключается в том, что, когда автомобиль, например, вытягивает другой автомобиль из кювета, поднимаясь по крутому откосу, при оттаскивании упавшего дерева с дороги, вытягивая большую нагрузку в течение продолжительного периода времени или при долгом подъеме по откосу, то можно обеспечить больший крутящий момент, выбирая установку пониженной передачи. Непрерывные периоды большого крутящего момента двигателя и пробуксовки преобразователя крутящего момента приводят к повышению температуры масла, и потенциально может произойти нарушение эксплуатации трансмиссии, а выбор пониженной передачи может защитить трансмиссию от этого.
Пример 4
Модуль 34 рекомендаций для водителя может работать так, чтобы рекомендовать установить пониженную передачу раздаточной коробки, если автомобиль находится на крутом уклоне. Например, модуль 34 рекомендаций для водителя советует водителю выбрать пониженную передачу раздаточной коробки, чтобы тронуться на уклонах, которые являются слишком крутыми, чтобы начать подъем на высокой передаче. Рекомендация основана на функции определения уклона, когда автомобиль стоит на месте, и использует альтернативные пороговые значения, если имеется прицеп, и он определен автомобилем (состояние прицепа ВКЛ). Рекомендацию не дают, если уже выбрана пониженная передача, автомобиль стоит на месте, определено низкое поверхностное трение, температура окружающей среды ниже порогового значения, при котором может возникнуть низкое поверхностное трение, или установлен сбой для любого критичного входного сигнала для данного компонента системы. Причина такой работы заключается в том, что, если на колесах доступен недостаточный крутящий момент, чтобы тронуться на уклоне на высокой передаче, то выбор пониженной передачи перед троганием предоставит больший контроль.
Пример 5
Модуль 34 рекомендаций для водителя может работать так, чтобы рекомендовать водителю выбрать высоту просвета пневматической подвески для бездорожья, если автомобиль все время передвигается по неровной дороге. Рекомендация основана на функции определения неровности дороги и расстоянии, пройденном при данной неровности дороги. Рекомендацию не дают, если уже установлена высота просвета пневматической подвески для бездорожья, установлена промежуточная высота дорожного просвета подвески, автомобиль передвигается со скоростью за пределами диапазона скоростей выбора высоты просвета для бездорожья (например, со скоростью, превышающей заданную пороговую скорость, свыше которой высота дорожного просвета для бездорожья является нецелесообразной), к автомобилю присоединен прицеп (состояние прицепа ВКЛ) или установлен сбой для любого критичного входного сигнала системы. Причина такой работы заключается в том, что на очень неровных дорогах, или при преодолении больших препятствий и элементов рельефа увеличение дорожного просвета защитит от повреждения днища автомобиля или от посадки автомобиля на землю. Поэтому, этот режим работы называют рекомендацией “дорожный просвет для бездорожья для защиты днища или от посадки на землю”.
Пример 6
Модуль 34 рекомендаций для водителя может работать так, чтобы рекомендовать водителю выбрать высоту дорожного просвета пневматической подвески для бездорожья, если автомобиль периодически передвигается по неровной дороге. Поэтому, автомобиль оборудован аппаратурой для приема от водителя входных сигналов с подходящей установкой для пневматической подвески в ответ на рекомендацию, которую получил водитель. Рекомендация основана на функции определения неровности дороги и расстоянии, пройденном при данной неровности дороги. Рекомендацию не дают, если уже установлена высота просвета пневматической подвески для бездорожья, установлена промежуточная высота дорожного просвета подвески, автомобиль передвигается со скоростью за пределами диапазона скоростей выбора высоты просвета для бездорожья (например, со скоростью, превышающей заданную пороговую скорость, свыше которой высота дорожного просвета для бездорожья является нецелесообразной), к автомобилю присоединен прицеп (состояние прицепа ВКЛ) или установлен сбой для любого критичного входного сигнала системы. Термин “периодически” в этом контексте означает, что неровность дороги не продолжается достаточно долго, чтобы активировать рекомендацию “дорожный просвет для бездорожья для защиты днища или от посадки на землю”, как ранее упоминалось в примере 5. Причина такой работы заключается в том, что на периодически неровных дорогах увеличение дорожного просвета защитит от повреждения днища или от посадки автомобиля на землю.
Пример 7
Модуль 34 рекомендаций для водителя может работать так, чтобы рекомендовать водителю выбрать повышенную передачу раздаточной коробки для преобладающих условий вождения. Поэтому, автомобиль оборудован аппаратурой для приема от водителя входных сигналов с подходящей передачей раздаточной коробки в ответ на рекомендацию, которую получил водитель. Рекомендация основана на функции определения скорости автомобиля и времени, в течение которого имеет место эта скорость автомобиля. Рекомендацию не дают, если уже выбрана высокая передача или установлен сбой для любого критичного входного сигнала системы. Причина такой работы заключается в том, что, если выбрана пониженная передача раздаточной коробки, и автомобиль ведут на скоростях, достигающих предела для пониженной передачи в течение продолжительного периода времени, то может возникнуть нарушение эксплуатации трансмиссии. Также могут иметь место случаи, когда водитель непреднамеренно выбрал пониженную передачу, в этом случае рекомендация выбрать повышенную передачу снижает вероятность раздражения водителя.
Пример 8
Модуль 34 рекомендаций для водителя может работать так, чтобы рекомендовать водителю выбрать автоматический режим управления, если автомобиль передвигается по шоссе в течение продолжительного времени в выбранном вручную режиме MR, GGS, Sand или RB. Рекомендацию не дают, если контроль динамической стабильности выключен (DSC OFF), у автомобиля обнаружен прицеп (состояние прицепа ВКЛ) или установлен сбой для любого критичного входного сигнала системы. Причина такой работы заключается в том, что, если водителем был выбран неподходящий режим управления, то работа автомобиля не оптимизирована для условий шоссе. Рекомендация выбрать автоматический режим управления снижает вероятность недовольства водителя, так как тогда для водителя будет автоматически выбран наиболее подходящий режим управления.
Пример 9
В другом варианте осуществления изобретения модуль рекомендаций для водителя может рекомендовать водителю осуществить выбор из нескольких различных режимов стиля вождения, таких как стандартный режим, экономичный режим (зачастую называемый Эко режимом) и спортивный режим, с использованием селектора системного режима стиля вождения. Например, если водитель выбрал спортивный режим, но из индикаторов условий вождения установлено, что автомобиль перешел из высокоскоростного, спортивного окружения (например, автострады) в низкоскоростное, окружение экономичного стиля вождения (например, городское), то модуль рекомендаций для водителя будет рекомендовать водителю выбрать с помощью селектора системного режима стиля вождения Эко режим как наиболее подходящий режим стиля вождения.
Для каждого режима стиля вождения, который можно выбрать, различные подсистемы автомобиля будут иметь предпочтительные установки или диапазон установок, которые подходят для конкретного стиля вождения. Например, при выборе Эко режима или спортивного режима (или любого другого режима стиля вождения) подсистемы автомобиля, для которых могут быть назначены предпочтительные установки (или диапазон установок) включают в себя коробку передач, часть системы управления двигателем, которая включает в себя программы управления дросселем, определяющие подачу топлива, и часть системы управления двигателем, которая включает в себя калибровочные программы.
Пример 10
В другом варианте осуществления изобретения, если автомобиль оборудован коробкой передач, имеющей большое количество передач (например, от 1 до 10 передач), то в ответ на индикаторы условий вождения модуль рекомендаций для водителя рекомендует водителю выбрать из только из избранной группы передач (например, низкие передачи от 1 до 4).
Пример 11
Другие подсистемы автомобиля, в отношении которых водителю может быть дана рекомендация насчет предпочтительных установок, включают в себя тормозную систему автомобиля, систему рулевого управления автомобиля или акселератор автомобиля. Например, исходя из индикаторов условий вождения, например, холм с крутым подъемом, водителю может быть передан сигнал, касающийся предпочтительных установок ручного тормоза тормозной системы автомобиля, т.е. что следует включить ручной тормоз. Другие установки, предоставляемые водителю, могут представлять собой индикаторы того, что угол поворота рулевого колеса слишком большой для данных условий местности, что ускорение слишком большое для данных условий местности, или что торможение слишком сильное для данных условий местности. Например, водителю может быть предоставлена индикация того, что угол поворота рулевого колеса слишком большой для данных условий местности, если было определено, что это так, а если было определено, что угол рулевого колеса для данных условий местности является подходящим, то водителю не предоставляют индикатор, либо водителю показывают, что угол поворота рулевого колеса является подходящим (например, в виде визуального отображения лампочки, или нет).
Пример 12
В другом варианте осуществления на селекторный модуль 20 могут быть переданы индикаторы условий вождения, которые получают от другой системы управления автомобиля, например, чтобы показать состояние системы управления (например, ВКЛ или ВЫКЛ). Состояние системы управления может быть выбрано автоматически автомобильной системой, или оно может представлять собой состояние, заданное пользователем. В ответ на сигнал состояния определяют предпочтительные установки (например, ВКЛ или ВЫКЛ), и на модуль 34 рекомендаций для водителя передают выходной сигнал, чтобы предоставить водителю рекомендованные инструкции, касающиеся предпочтительных установок. В качестве примера, на селекторный модуль может быть передан индикатор условий вождения, касающийся состояния системы автоматического поддержания скорости автомобиля, и в ответ на который можно определить, что подходящим является определенный режим управления подсистемами. Тогда, водителю рекомендуют предпочтительные установки для режима управления подсистемами.
Другие примеры
Модуль 32 HMI также может быть оборудован дополнительным селекторным переключателем (не показан), который может использоваться водителем, чтобы применить рекомендованные отображаемые или иным образом переданные модулем 34 рекомендаций для водителя установки. Например, дополнительный селекторный переключатель может быть выполнен в виде нажимной кнопки, которая, когда нажата водителем, инициирует управляющие сигналы для подсистем автомобиля, которые применяют рекомендованные установки для автомобиля.
Следует учесть, что предоставляемая водителю модулем рекомендаций для водителя индикация может быть выполнена не обязательно визуально, например, в виде звуковых инструкций, если соответствующая звуковая аппаратура имеется в автомобиле. Проекционный бортовой индикатор также может взаимодействовать с модулем 34 рекомендаций для водителя, чтобы передать рекомендацию для водителя.
В других вариантах осуществления автомобильная система управления может принимать сигналы от одной или нескольких камер или других систем детектирования, выполненных в автомобиле, чтобы определить, какой из режимов управления подсистемами является наиболее подходящим. Использование камер или других систем детектирования таким образом предоставляет средство для прогнозирования заранее изменения местности или препятствий на пути автомобиля, например, позволяет предупредить водителя заранее о наиболее подходящем режиме управления подсистемами, которые следует выбрать, чтобы преодолеть такие условия. Понятно, что водителю не обязательно давать рекомендации только по поводу локальной местности в непосредственной близости от автомобиля (например, непосредственно под колесами автомобиля), но также можно давать рекомендации по поводу наиболее подходящего режима управления, чтобы двигаться по местности, приближающейся на пути автомобиля.
Особенное преимущество изобретения заключается в том, что входные сигналы от датчиков педали тормоза и акселератора подают на модуль 18 оценивания и используют в качестве индикаторов рельефа при вычислении вероятностей, чтобы определить наиболее подходящий режим управления. Показания от датчиков педалей, заключающиеся в том, что имеет место одновременное использование педали тормоза и газа, обеспечивает индикацию сущности местности, по которой передвигается автомобиль.
Еще одно преимущество изобретения заключается в том, что сигналы, выходящие от ePAS, чтобы показать рулевое усилие, прикладываемое к колесам (рулевое усилие, прикладываемое водителем, в сочетании с рулевым усилием, прикладываемым системой ePAS), используют, чтобы определить наиболее подходящий режим управления, подавая сигнал о рулевом усилии на вход модуля 18 оценивания.
Еще один новый аспект изобретения заключается в том, что состояние очистителей ветрового стекла или передних фар и длительность их работы используют в качестве индикатора рельефа для подачи на вход модуля 18 оценивания и/или селекторного модуля 20.
Сигнал стеклоочистителя, сигнал о рулевом усилии на рулевом колесе и сигналы о положении педалей подают на вход VCU 10, так чтобы внести вклад в определение наиболее подходящего режима управления, исходя из вычисления совместной вероятности в селекторном модуле 20.
Следует учесть, что варианты осуществления, описанные выше, даны только в качестве примера, и не предполагается, что они ограничивают изобретение, объем которого задан в прилагаемой формуле изобретения. Также понятно, что описанные варианты осуществления могут быть использованы по-отдельности или в сочетании.
Группа изобретений относится к интеллектуальным автомобильным системам. Предложена система рекомендаций для вождения автомобиля, система содержит: одну или множество автомобильных систем детектирования и автомобильных систем датчиков для выработки сигнала, из которого получают, по меньшей мере, один индикатор рельефных условий; средство выбора, предназначенное для получения, по меньшей мере, одного индикатора рельефных условий автомобиля и для осуществления выбора из множества наборов установок предпочтительных установок, по меньшей мере, для одной подсистемы автомобиля, включая систему пневматической подвески, в ответ на, по меньшей мере, один индикатор рельефных условий; средство индикации, предназначенное для предоставления водителю индикации предпочтительных установок для, по меньшей мере, указанной подсистемы пневматической подвески, в которой средство выбора принимает сигнал о состоянии прицепа и подавляет индикацию предпочтительных установок указанной подсистемы пневматической подвески. Достигается повышение эффективности и комфорта управления транспортным средством с прицепом. 3 н. и 22 з.п. ф-лы, 2 ил.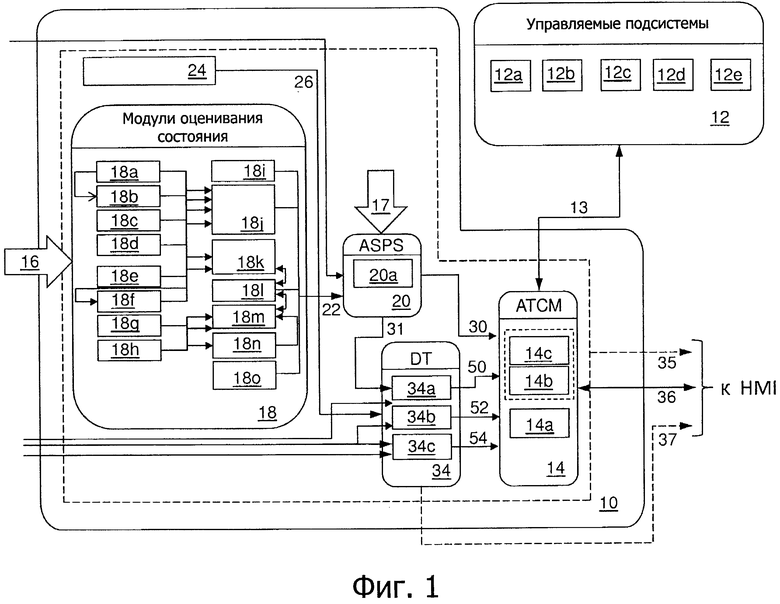
1. Система рекомендаций для вождения автомобиля, который содержит, по меньшей мере, одну автомобильную подсистему (12а-12е), причем система содержит:
одну или множество автомобильных систем детектирования и автомобильных систем датчиков для выработки сигнала, из которого получают, по меньшей мере, один индикатор рельефных условий;
средство (20) выбора, предназначенное для получения, по меньшей мере, одного индикатора (17, 22, 26) рельефных условий автомобиля и для осуществления выбора из множества наборов установок предпочтительных установок, по меньшей мере, для одной подсистемы (12а-12е) автомобиля, включая систему пневматической подвески, в ответ на, по меньшей мере, один индикатор (17, 22, 26) рельефных условий; и
средство индикации, предназначенное для предоставления водителю индикации предпочтительных установок для, по меньшей мере, указанной подсистемы пневматической подвески, в которой
средство выбора принимает сигнал о состоянии прицепа и подавляет индикацию предпочтительных установок указанной подсистемы пневматической подвески, если указанный сигнал о состоянии прицепа указывает на то, что прицеп присоединен.
2. Система по п. 1, содержащая средство для получения входного сигнала от водителя, показывающего предпочтительные установки.
3. Система по п. 2, содержащая средство управления, реагирующее на входной сигнал от водителя и выполненное с возможностью выбора предпочтительных установок, по меньшей мере, для одной подсистемы автомобиля.
4. Система по любому из пп. 1-3, содержащая систему детектирования, в которой, по меньшей мере, один из индикаторов рельефных условий получен из сигнала, отображающего местность в непосредственной близости от автомобиля, по которой он передвигается.
5. Система по любому из пп. 1-3, в которой, по меньшей мере, один из индикаторов рельефных условий получен из сигнала, являющегося признаком местности, окружающей окрестность автомобиля, над которой он проедет.
6. Система по п. 4, в которой каждое из рельефных условий, которому соответствует каждая из нескольких установок, представляет, по меньшей мере, один тип местности.
7. Система по любому из пп. 1-3, в которой, по меньшей мере, один индикатор рельефных условий содержит один или множество элементов из следующих: скорость автомобиля, неровность дороги, расстояние, пройденное при данной неровности дороги, поверхностное трение на колесах автомобиля, уклон автомобиля, крутящий момент двигателя автомобиля и температура окружающей среды.
8. Система по любому из пп. 1-3, в которой одна из подсистем (12а-12е) автомобиля содержит раздаточную коробку и в которой установки для раздаточной коробки, из которых выбирают предпочтительные установки, содержат установки повышенной и пониженной передачи.
9. Система по п. 8, содержащая следующее:
средство для получения сигнала, указывающего скорость автомобиля;
средство для сравнения сигнала, показывающего скорость автомобиля, с заданной пороговой скоростью автомобиля, выше которой установка пониженной передачи является нецелесообразной; и
средство для подавления средства индикации в условиях, когда определено, что предпочтительные установки являются установками пониженной передачи, а скорость автомобиля превышает заданную пороговую скорость автомобиля.
10. Система по любому из пп. 1-3, в которой установки для системы пневматической подвески, из которых выбираются предпочтительные установки, включают в себя установки высоты дорожного просвета для бездорожья, промежуточные и шоссейные.
11. Система по п. 10, содержащая:
средство для получения сигнала, указывающего скорость автомобиля;
средство для сравнения сигнала, отображающего скорость автомобиля, с заданной пороговой скоростью автомобиля, выше которой установка дорожного просвета для бездорожья является нецелесообразной; и
средство для подавления средства индикации в условиях, когда определено, что предпочтительные установки являются установками дорожного просвета для бездорожья, а скорость автомобиля превышает заданную пороговую скорость автомобиля.
12. Система по любому из пп. 1-3, в которой средство индикации содержит устройство визуального отображения, и/или звуковое устройство, и/или кинестетическое устройство.
13. Система по любому из пп. 1-3, в которой индикация предпочтительных установок для указанной системы пневматической подвески является индикацией для водителя выбрать высоту просвета пневматической подвески для бездорожья, если автомобиль передвигается по неровной дороге.
14. Автомобильная система управления, по меньшей мере, для одной подсистемы (12а-12е) автомобиля, причем автомобильная система управления содержит систему по любому из пп. 1-13 и дополнительно содержит:
контроллер (14) подсистем, предназначенный для управления, по меньшей мере, одной подсистемой автомобиля в нескольких режимах управления подсистемами, каждый из которых соответствует одному или нескольким различным условиям вождения автомобилем, и
вычислительное средство (20) для вычисления, по меньшей мере, одного из индикаторов условий вождения для определения, насколько подходит каждый из режимов управления подсистемами и инициирования выходного сигнала (31), отображающего наиболее предпочтительный режим управления подсистемами.
15. Автомобильная система управления по п. 14, в которой вычислительное средство (20) предназначено для определения вероятности того, что каждый из режимов управления подсистемами является приемлемым, и при этом вычислительное средство инициирует выходной сигнал (31), отображающий режим управления подсистемами, имеющий наибольшую вероятность.
16. Автомобильная система управления по п. 14 или 15, дополнительно содержащая:
автоматическое средство управления, функционирующее в режиме автоматического отклика, для выбора режима управления подсистемами в зависимости от выхода.
17. Автомобильная система управления по п. 16, в которой автоматическое средство управления выбирает режим управления подсистемой в ответ на выходной сигнал (31), отображающий режим управления подсистемами, имеющий наибольшую вероятность быть приемлемым.
18. Автомобильная система управления по п. 16, содержащая средство переключения, предназначенное для переключения между режимом автоматического отклика, в котором автоматическое средство управления автоматически управляет подсистемами автомобиля в зависимости от выхода, и ручным режимом, в котором режим управления соответствующей подсистемой водитель выбирает вручную.
19. Автомобильная система управления по п. 18, которая обеспечивает индикацию для водителя, чтобы он переключился в режим автоматического отклика, если в ручном режиме водителем был выбран режим управления подсистемами, несовместимый с режимом управления подсистемами, выбранным в зависимости от выхода.
20. Автомобильная система управления по п. 14 или 15, в которой, по меньшей мере, одна подсистема (12а-12е) автомобиля включает в себя один или несколько из следующих элементов: систему управления двигателем, контроллер рулевого управления, контроллер тормоза, контроллер трансмиссии и контроллер подвески.
21. Автомобильная система управления по п. 14 или 15, в которой индикация предпочтительных установок для указанной системы пневматической подвески является индикацией для водителя выбрать высоту просвета пневматической подвески для бездорожья, если автомобиль передвигается по неровной дороге.
22. Способ предоставления рекомендации водителю автомобиля, содержащего одну или множество подсистем автомобиля, включая систему пневматической подвески, в котором:
генерируют сигнал, из которого получают, по меньшей мере, один индикатор (17, 22, 26) рельефных условий для автомобиля;
получают, по меньшей мере, один индикатор (17, 22, 26) рельефных условий для автомобиля;
выбирают из множества установок предпочтительные установки для одной или каждой подсистемы (12а-12е) автомобиля в ответ на, по меньшей мере, один индикатор (17, 22, 26) рельефных условий; и
предоставляют водителю индикацию предпочтительных установок, по меньшей мере, для указанной подсистемы пневматической подвески;
принимают сигнал о состоянии прицепа; и
подавляют индикацию предпочтительных установок указанной подсистемы пневматической подвески, если указанный сигнал о состоянии прицепа указывает на то, что прицеп присоединен.
23. Способ по п. 22, в котором, по меньшей мере, один из индикаторов рельефных условий получают из сигнала, являющегося признаком местности, окружающей окрестность автомобиля, над которой он проедет.
24. Способ по п. 22, в котором, по меньшей мере, один из индикаторов рельефных условий получают из сигнала, являющегося признаком местности в непосредственной близости от автомобиля, по которой он передвигается.
25. Способ по любому из пп. 22-24, в котором индикация предпочтительных установок для указанной системы пневматической подвески является индикацией для водителя выбрать высоту просвета пневматической подвески для бездорожья, если автомобиль передвигается по неровной дороге.
| US 20090143936 A1, 04.06.2009 | |||
| US 4204255 A, 20.05.1980 | |||
| ИНТЕРАКТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2010 |
|
RU2429151C1 |

