Изобретение относится к контрольно-измерительной технике, более конкретно - к средствам охранной сигнализации и методам обнаружения движущихся электропроводящих объектов, пересекающих охраняемый рубеж.
В настоящее время для обнаружения пересекающих охраняемый рубеж движущихся электропроводящих объектов, которые не обладают магнитными свойствами, применяются различные и средства и методы, основанные на общих физических принципах. Так, например, в патенте SU 1246905 (опубликован 23.07.1986) описан метод регистрации расположения движущихся металлических объектов и устройство, предназначенное для реализации данного метода. Устройство содержит возбуждающую и измерительную катушку индуктивности. При протекании через возбуждающую катушку индуктивности тока происходит возбуждение в петле магнитного потока, который после размыкания коммутатора уменьшается до нуля. В случае нахождения электропроводящего объекта в зоне расположения петли часть генерируемого магнитного потока проникает в тело объекта. Вследствие этого при отключении коммутатора, т.е. при прекращении протекания тока через возбуждающую катушку, происходит более медленное снижение магнитного потока за счет действия вихревых токов в электропроводящем объекте. Медленное снижение магнитного потока индуцирует постоянное напряжение в петле катушки индуктивности, величина которого фиксируется во время контрольных замеров. При циклическом повторении процесса возбуждения магнитного и измерения индуцируемого напряжения в катушке индуктивности осуществляется процесс непрерывного измерения и регистрации электропроводящих объектов.
Следует отметить, что описанные выше способ и устройство применимы только для движущихся объектов, обладающих высокой электропроводностью, в частности для металлических объектов. Устройство обладает высоким энергопотреблением, и при использовании известного технического решения для протяженных линий охраняемого рубежа требуется сложная система коммутации токов, протекающих через локальные участки электрических цепей, подключенных к катушкам индуктивности. Кроме того, известное устройство чувствительно к внешним магнитным шумам. Частичное устранение влияния окружающей среды достигается за счет усложнения конструкции катушек индуктивности.
Известен также ряд технических средств обнаружения движущихся электропроводящих объектов, действующих на основе линий вытекающей волны. Формирование полезного сигнала для подобного рода средств обнаружения происходит при совместной работе двух протяженных антенн, горизонтально размещенных в грунте. Одна из антенн является передающей, а другая - принимающей (измерительной). Такие средства обнаружения работают на частотах от 40 до 70 МГц. При данном уровне частот длина используемых антенн существенно превышает длину волн электромагнитных колебаний. Вследствие этого процесс распределения возбуждаемых электромагнитных полей и токов в антеннах имеет преимущественно волной характер, и по этой причине формируемый полезный сигнал зависит от параметров окружающей среды.
К указанным средствам обнаружения относится, например, устройство, предназначенное для обнаружения несанкционированного проникновения через охраняемый рубеж, которое описано в патенте US 7576648 (опубликован 18.08.2009). Способ работы данного устройства основан на генерации электромагнитного сигнала и передачу его через передающую линию, выполненную в виде коаксиального кабеля. Создаваемое электромагнитное поле индуцирует сигнал во второй линии, также выполненной в виде коаксиального кабеля.
Участки передающего и измерительного кабеля могут устанавливаться в грунте вдоль линии охраняемого рубежа параллельно друг другу. Измеряемый сигнал во второй линии содержит информацию о нахождении движущегося объекта, пересекающего охраняемый рубеж. Это связано с тем, что излучаемая высокочастотная энергия рассеивается движущимся объектом, например телом человека, в зависимости от величины электропроводности объекта. При этом фаза излучаемого сигнала изменяется в соответствии с величиной относительной диэлектрической проницаемости, например, тела человека. Система обнаружения включает в свой состав блок передачи сигнала, с помощью которого осуществляется генерация и передача высокочастотного электромагнитного сигнала с частотой от 30 до 300 МГц. К выводу измерительного кабеля подключен блок приема сигнала, содержащего информацию о движущемся электропроводящем объекте.
Чувствительность данного устройства зависит от ряда параметров окружающей среды, в том числе от однородности свойств грунта, в котором располагаются участки передающего и измерительного кабеля. Такого рода чувствительность обусловлена волновым характером процесса передачи и приема сигнала, рассеянного на движущемся объекте. Изменение параметров внешней среды, например, из-за неоднородности грунта или изменения его свойств вследствие перемены погодно-климатических условий приводит к изменению электромагнитного поля вблизи антенн (участков коаксиального кабеля). Неконтролируемое изменение параметров электромагнитного поля в свою очередь влияет на сигнал, индуцируемый в измерительной антенне (коаксиальном кабеле). В результате этого появляются ложные срабатывания системы обработки сигнала и снижается достоверность получаемой информации из-за неконтролируемого изменения размеров зоны обнаружения движущихся электропроводящих объектов. Нестабильность параметров окружающей среды приводит к существенному снижению надежности и функциональных возможностей всей системы обнаружения движущихся электропроводящих объектов в целом.
Снижение влияния нестабильности параметров окружающей среды на достоверность информации о нарушении охраняемого рубежа обеспечивается с помощью магнитоэлектрических систем обнаружения движущихся электропроводящих объектов. Характерной особенностью систем обнаружения данного типа является применение в качестве излучателей и измерителей электромагнитного сигнала магнитных диполей, размер которых много меньше длины волны электромагнитного сигнала. В качестве магнитных диполей могут использоваться рамочные антенны. При этом кабель связи, соединяющий группы излучателей и измерителей не влияет на формирование электромагнитного поля.
Распределение тока в антеннах используемого типа носит не волновой, а равномерный характер. Вследствие этого в непосредственной близости от антенн формируется квазистационарное магнитное поле, образующее зону индукции. Величина индукции поля зависит в основном от магнитной проницаемости среды при условии, что данная среда обладает малой электропроводностью. При установке антенн (излучателей и измерителей) в грунте рабочие параметры антенн слабо зависят от характеристик и состояния окружающей среды, поскольку обычный грунт является немагнитной средой. Величин магнитной проницаемости грунта не изменяется и равна ~1. Вследствие этого с помощью магнитоэлектрических систем обнаружения можно формировать стабильную зону обнаружения движущихся электропроводящих объектов при установке антенн в различных по свойствам грунтах и неравномерном вдоль охраняемого рубежа обводнении грунтов. Вместе с тем изменение погодно-климатических условий в меньшей степени влияет на рабочие характеристики магнитоэлектрической системы обнаружения.
Известно устройство охранной сигнализации, представляющее собой магнитоэлектрическую систему обнаружения, конструкция которого раскрыта в патенте RU 2071121 (опубликован 27.12.1996). Известное устройство содержит кабели связи, объединяющие в группы излучатели и приемники (измерители) электромагнитных сигналов. В состав устройства входит генератор сигналов и блок обработки принимаемых сигналов. Приемники (измерители) сигналов выполнены в виде преобразователей магнитного поля в электрическое напряжение, а излучатели сигналов - в виде преобразователей электрического напряжения в магнитное поле. Приемники и излучатели, представляющие собой магнитные диполи, устанавливаются, например, в грунте в чередующемся порядке и независимо подключаются через кабели связи к блоку обработки сигналов.
В процессе работы устройства генератор формирует сигналы в форме переменного напряжения постоянной амплитуды. Сигналы передаются через кабели связи на входы излучателей (преобразователей электрического напряжения в магнитное поле). Вблизи антенн-излучателей создается квазистационарное электромагнитное поле с преобладающей магнитной составляющей поля в ближней зоне излучателя. Часть энергии этого поля преобразуется с помощью антенн-измерителей (приемников) в электрическое напряжение, величина которого пропорциональна напряженности поля. Индуцируемое переменное напряжение передается через кабели связи на первый вход синхронного детектора, на второй вход которого подается управляющий опорный сигнал. С выхода детектора сигнал напряжения подается через полосовой фильтр на вход порогового блока, вырабатывающего сигнал о нарушении охраняемого рубежа. Вблизи антенн-излучателей на расстоянии, меньшем длины волны излучаемого и принимаемого сигнала, по величине энергии преобладает магнитная составляющая по отношению к электрической составляющей сформированного электромагнитного поля (сигнала). За счет этого повышается помехоустойчивость устройства охранной сигнализации.
Следует отметить, что известное устройство допускает пропуск крупных движущихся объектов без соответствующей сигнализации в определенных зонах охраняемого рубежа. Такие зоны обнаружения, обладающие пониженной чувствительностью, расположены вблизи вертикальных плоскостей, проходящих через векторы магнитных моментов антенн-излучателей, и вблизи вертикальных плоскостей, проходящих через векторы магнитных моментов антенн-измерителей. В области указанных плоскостей при ориентации векторов магнитных моментов антенн ортогонально срединной линии охраняемого рубежа (зоны обнаружения объектов) происходит снижение до нуля уровня электромагнитного сигнала. После этого сигнал изменяет свой знак и амплитуда сигнала растет до достижения максимального уровня.
Данная зависимость изменения величины амплитуды сигнала обусловлена распределением диаграмм направленности ориентированных в пространстве антенн (магнитных диполей). При ориентации антенн, характерной для систем обнаружения движущихся электропроводящих объектов с так называемой узкой зоной обнаружения, ширина зон с пониженной чувствительностью, в которых падает достоверность обнаружения движущихся объектов, соизмерима с поперечным размером движущегося объекта, в частности человека.
Кроме того, в известном устройстве отсутствует локализация измеряемого сигнала, т.е. связь фиксируемого сигнала с определенными излучателями и измерителями, расположенными в определенной пространственной области зоны обнаружения. Входной сигнал, поступающий в блок обработки сигнала, является суммой всех сигналов, принимаемых четными или нечетными антеннами-измерителями, которые могут быть расположены на протяжении всего охраняемого периметра (рубежа). Из-за отсутствия связи между фиксируемым сигналом и конкретной пространственной областью, в которой определен данный сигнал, невозможно достоверно определить область пересечения движущимся объектом охраняемого рубежа.
Наиболее близким аналогом изобретения является способ обнаружения движущихся электропроводящих объектов и средство обнаружения объектов, описанные в патенте RU 2303290 (опубликован 20.07.2007). Устройство, предназначенное для осуществления способа, содержит антенны-излучатели и антенны-измерители, выполненные в виде магнитных диполей и попарно сгруппированные из близлежащих излучателей и измерителей. Для исключения зон с пониженной чувствительностью излучатели и измерители устанавливают в один ряд в виде последовательно чередующихся ячеек излучателей, каждая из которых состоит из двух последовательно соединенных излучателей, и ячеек измерителей, каждая из которых состоит из двух последовательно соединенных измерителей, Излучатели и измерители, согласно описанию патента RU 2303290, устанавливают таким образом, что каждый измеритель и каждый излучатель оказываются между измерителем и излучателем какой-либо группы (пары) антенн. Антенны-излучатели соединены с усилителем мощности высокочастотных сигналов и обладают сопротивлением излучения не более 300 Ом.
С помощью сгруппированных излучателей и измерителей информация об обнаружении движущегося электропроводящего объекта фиксируется и передается в блок обработки сигнала и анализа информации. Далее полученная информация идентифицируется с определенной пространственной зоной, в которой расположена группа «излучатель-измеритель», генерирующая сигнал о нарушении охраняемого рубежа. Первичный анализ и обработка измеренных параметров электромагнитного поля производится с помощью микроконтроллеров, которые размещены непосредственно в антеннах-измерителях. Информация от периферийных устройств анализа и обработки сигнала передается в центральный блок обработки сигнала и анализа информации через кабели связи или по радиоканалу.
С целью обнаружения биообъектов и других слабо электропроводящих объектов частоту генерируемого высокочастотного напряжения в антеннах-излучателях выбирают более 1 МГц. Согласно описанию изобретения к патенту RU 2303290, за счет использования в известном устройстве средств первичного анализа и обработки параметров электромагнитного поля и идентификации антенн-излучателей и антенн-измерителей, с которых принимается сигнал, обеспечивается формирование равномерной зоны обнаружения, повышение устойчивости системы к воздействию внешних электромагнитных помех, а также снижение зависимости полезного сигнала от изменения параметров окружающей среды и нестабильности излучателей.
Однако, несмотря на достигнутые преимущества по сравнению с другими аналогами, известный способ обнаружения движущихся электропроводящих объектов и устройство, предназначенное для его осуществления, не позволяют обеспечить требуемую высокую достоверность обнаружения движущихся слабо электропроводящих объектов и высокую достоверность определения пространственной области пересечения объектом зоны обнаружения (охраняемого периметра). Данный недостаток связан с тем, что в процессе работы системы, в том виде как она описана в патенте RU 2303290, не исключена возможность возникновения пространственных зон пониженной чувствительностью вблизи вертикальных плоскостей, проходящих через векторы магнитных моментов антенн. Известное техническое решение не определяет взаимное расположение и пространственную ориентацию магнитных диполей, используемых в качестве антенн-излучателей и антенн-измерителей, и не раскрывает последовательность процессов излучения, измерения и обработки электромагнитных сигналов через сгруппированные антенны. Данная информация необходима для решения технической задачи, связанной с полным исключением зон с пониженной чувствительностью и обеспечением равномерного распределения зоны достоверного обнаружения движущегося объекта вдоль всего периметра охраняемого рубежа.
Патентуемое изобретение направлено на выполнение указанной выше технической задачи, решение которой позволяет достичь требуемый высокий уровень достоверности обнаружения движущихся электропроводящих объектов, в первую очередь слабо электропроводящих биообъектов, и точного определения пространственной области зоны обнаружения, в которой произошло нарушение охраняемого рубежа.
Достижение данных технических результатов обеспечивается при осуществлении способа обнаружения движущихся электропроводящих объектов, который заключается в размещении вдоль срединной линии зоны обнаружения объектов излучателей электромагнитного сигнала, соединенных между собой кабелем связи, и измерителей электромагнитного сигнала, также соединенных между собой кабелем связи. Для осуществления способа используют излучатели и измерители с антеннами, выполненными в виде магнитных диполей. Применение в качестве антенн-излучателей и антенн-измерителей магнитных диполей (магнитных антенн) определяется слабой зависимостью параметров магнитных антенн от состояния и изменения параметров окружающей среды. Данное свойство магнитных антенн позволяет устанавливать излучатели и измерители в среде с медленно изменяющимися электрическими параметрами, например в промокающем грунте, на мелководье, в траве, вблизи кустарников и деревьев.
Излучатели и измерители устанавливают в один ряд в виде последовательно чередующихся ячеек излучателей, каждая из которых состоит из двух последовательно соединенных излучателей, и ячеек измерителей, каждая из которых состоит из двух последовательно соединенных измерителей. Передачу электромагнитных сигналов в зону обнаружения объектов производят с помощью излучателей. Прием электромагнитных сигналов осуществляют с помощью измерителей. Принятые электромагнитные сигналы обрабатывают и определяют по результатам измерений наличие движущихся электропроводящих объектов и их местоположение.
Согласно изобретению магнитные диполи на каждом контролируемом участке зоны обнаружения объектов размещают вдоль срединной линии зоны обнаружения объектов следующим образом: вектор магнитного момента каждого магнитного диполя должен быть расположен в горизонтальной плоскости и ориентирован ортогонально касательной к срединной линии зоны обнаружения объектов в точке пересечения проекции вектора магнитного момента и срединной линии зоны обнаружения объектов. В качестве контролируемого участка зоны обнаружения объектов используют, по меньшей мере, одну ячейку излучателей и две ячейки измерителей, примыкающие к ячейке излучателей с противоположных сторон.
Передачу электромагнитного сигнала на контролируемом участке зоны обнаружения объектов в каждый момент времени осуществляют с помощью одного излучателя в выбранной ячейке излучателей. Прием электромагнитного сигнала производят с помощью двух измерителей, расположенных в двух ячейках измерителей, примыкающих к выбранной ячейке работающего излучателя. Первоначально включают первый излучатель в выбранной ячейке излучателей. Прием электромагнитного сигнала осуществляют с помощью наиболее удаленного от первого излучателя измерителя, расположенного в ячейке измерителей, примыкающей к первому излучателю, и с помощью близлежащего к первому излучателю измерителя, расположенного в противоположной ячейке измерителей, примыкающей ко второму излучателю в выбранной ячейке излучателей.
После прекращения передачи и приема электромагнитного сигнала, передаваемого первым излучателем, включают второй излучатель в выбранной ячейке излучателей. Прием электромагнитного сигнала осуществляют с помощью наиболее удаленного от второго излучателя измерителя, расположенного в ячейке измерителей, примыкающей ко второму излучателю, и с помощью близлежащего ко второму излучателю измерителя, расположенного в противоположной ячейке измерителей, примыкающей к первому излучателю. Наличие движущихся электропроводящих объектов и местоположение объектов определяют путем сравнения электромагнитных сигналов, полученных при включении первого и второго излучателей каждой ячейки излучателей на контролируемом участке зоны обнаружения, с заранее заданным пороговым значением сигнала.
Описанная выше ориентация магнитных диполей, выполняющих функции излучателей и измерителей, относительно срединной линии зоны обнаружения характеризует метод сигналообразования, применяемый для охраняемых рубежей с так называемой «узкой зоной». Данный метод обладает рядом преимуществ, главным из которых является возможность устойчивого обнаружения движущихся биообъектов вблизи крупных движущихся или стационарных электропроводящих объектов, в частности вблизи металлических оград.
Для режима работы средства обнаружения движущихся электропроводящих объектов с «узкой зоной» охраняемого рубежа характерно расположение зоны с максимальным уровнем амплитуды принимаемого сигнала вдоль срединной линии зоны обнаружения (периметра охраняемого рубежа). Однако при данном режиме работы амплитуда принимаемого сигнала изменяется вдоль срединной линии зоны обнаружения в зависимости от места расположения излучателей и измерителей. Вблизи вертикальных плоскостей, в которых расположены векторы магнитных моментов магнитных диполей уровень принимаемого сигнала снижается до нуля, а затем увеличивается со сменой знака сигнала.
Вследствие данного явления, обусловленного диаграммой направленности магнитных диполей, векторы магнитных моментов которых ориентированы ортогонально относительно касательной к срединной линии зоны обнаружения объектов в точке пересечения проекции вектора магнитного момента и срединной линии зоны обнаружения объектов, над антеннами возникают зоны с пониженной чувствительностью. При пересечении охраняемого рубежа биообъектом-нарушителем непосредственно над работающим излучателем или измерителем, установленным в грунте, образуются достаточно узкие «слепые» коридоры, ширина которых соизмерима с характерных поперечным размером нарушителя. Величина принимаемого сигнала в таких коридорах имеет нулевое или близкое к нулевому значение. При минимальной амплитуде сигнала на определенных участках охраняемого рубежа снижается чувствительность средства обнаружения движущихся объектов в целом.
Наличие периодически повторяющихся зон с пониженной чувствительностью вдоль охраняемого рубежа с «узкой зоной» существенно снижает достоверность получаемой информации о нарушителе. При этом возрастает вероятность прохода нарушителя через охраняемый рубеж без получения достоверной информации не только о пространственной области пересечения охраняемого периметра, но и самом факте пересечения охраняемого периметра нарушителем.
Устранение данного недостатка обеспечивается с помощью патентуемого способа путем введения определенной последовательности включения излучателей на контролируемом участке зоны обнаружения объектов-нарушителей, приема электромагнитного сигнала определенными измерителями и сравнения результатов измерений. Работа излучателей разнесена по времени таким образом, что в каждый момент времени электромагнитное поле на контролируемом участке зоны обнаружения создается только одним излучателем, при этом обеспечивается синхронный раздельный прием сигналов с помощью двух измерителей, расположенных в ячейках, примыкающих к ячейке излучателей, в которой находится работающий излучатель. Выбранное расположение измерителей, с помощью которых производится прием сигнала в каждый момент времени, и синхронизация работы одного излучателя с работой двух измерителей обеспечивает поочередное перекрытие зон с пониженной чувствительностью.
В результате поочередного перекрытия зон с пониженной чувствительностью в процессе работы средства обнаружения с заданной последовательностью включения излучателей и измерителей осуществляется получение полной информации вдоль каждого контролируемого участка зоны обнаружения. Измеренные сигналы, полученные близлежащими парами измерителей, сравниваются с заранее заданным пороговым значением сигнала. В результате такого сравнения получают достоверную информацию о факте пересечения нарушителем охраняемого рубежа и о конкретной области зоны обнаружения, в которой произошло нарушение. Данный результат обусловлен тем, что, по крайней мере, один из сигналов, получаемых от близлежащих измерителей, расположенных в одной ячейке, при последовательном включении выбранных излучателей и измерителей имеет достаточно высокий уровень амплитуды в зоне пониженной чувствительности, расположенной над соседним измерителем. Аналогичным образом необходимый уровень амплитуды электромагнитного сигнала достигается в процессе работы близлежащих излучателей, расположенных в одной ячейке излучателей, за счет последовательного переключения с одного работающего излучателя на другой работающий излучатель.
Для получения полной информации вдоль периметра охраняемого рубежа процесс передачи и приема электромагнитного сигнала периодически повторяют для всех ячеек излучателей и измерителей каждого контролируемого участка зоны обнаружения.
Процесс передачи и приема электромагнитного сигнала целесообразно периодически повторять с частотой в диапазоне от 20 Гц до 200 Гц. Оптимальный диапазон частоты опроса работающей пары измерителей выбирается с учетом необходимости исключения существенного влияния фликер-шума на достоверность получаемой информации (верхняя граница диапазона). С другой стороны, при выборе оптимального диапазона частоты опроса необходимо принимать во внимание максимальную скорость пересечения охраняемого рубежа объектом-нарушителем (нижняя граница диапазона). Так, например, при частоте опроса f=20 Гц, ширине зоны обнаружения W=3 м и скорости перемещения объекта-нарушителя в направлении охраняемого рубежа V=10 м/с может быть произведено шесть опросов измерителей, что характеризует высокую степень достоверности получаемой информации.
Расстояние между магнитным диполем излучателя, с помощью которого осуществляют передачу электромагнитного сигнала в выбранный момент времени, и магнитным диполем каждого из двух измерителей, с помощью которых осуществляют прием электромагнитного сигнала в выбранный момент времени, предпочтительно выбирают в диапазоне от 2 м до 6 м. Верхний предел данного диапазона расстояний обусловлен тем, что при увеличении расстояния более 2W=6 м, (где W≅3 м - характерная ширина «узкой» зоны обнаружения) увеличивается разброс амплитуды электромагнитного сигнала вдоль промежутка между работающими излучателем и измерителем. С другой стороны, при сближении работающих излучателя и измерителя на расстояния менее 2 м обнаруживается значительное превышение излучаемого электромагнитного сигнала над вторичным полезным сигналом, переизлучаемым объектом-нарушителем. В этом случае воздействие первичного сигнала может превысить динамический диапазон измерителя.
Расстояние между магнитными диполями, расположенными в каждой ячейке излучателей или измерителей, для повышения достоверности обнаружения объекта нарушителя целесообразно выбирать не менее 0,5 м. Данный предел расстояний определяется характерным поперечным размером биообъекта-нарушителя, например человека, который характеризует максимальную ширину зоны с пониженной чувствительностью. Иными словами, указанное выше условие характеризует способность достоверного обнаружения определенного вида объектов-нарушителей.
Частоту передаваемого электромагнитного сигнала предпочтительно выбирают в диапазоне от 10 МГц до 40 МГц. Для данного диапазона первичного передаваемого электромагнитного сигнала наиболее эффективно проявляется вторичный сигнал, переизлучаемый электропроводящим объектом-нарушителем.
В качестве магнитных диполей могут использоваться рамочные антенны или магнитные ферритовые антенны. Максимальный размер L таких антенн предпочтительно выбирают из условия: L<1/4λ, где λ - длина волны электромагнитного сигнала, передаваемого в зону обнаружения объектов.
Достижение указанных выше технических результатов обеспечивается также при использовании устройства для обнаружения движущихся электропроводящих объектов, которое включает в свой состав излучатели и измерители электромагнитного сигнала с антеннами, выполненными в виде магнитных диполей. Устройство содержит блок обработки информации и управления и кабели связи, соединяющие излучатели и измерители с блоком обработки информации и управления. Излучатели и измерители устанавливаются вдоль срединной линии зоны обнаружения объектов в один ряд в виде последовательно чередующихся ячеек излучателей и ячеек измерителей. Каждая из ячеек излучателей состоит из двух последовательно соединенных излучателей. Каждая из ячеек измерителей состоит из двух последовательно соединенных измерителей.
Согласно изобретению магнитные диполи на каждом контролируемом участке зоны обнаружения объектов размещены вдоль срединной линии зоны обнаружения объектов следующим образом: вектор магнитного момента каждого магнитного диполя расположен в горизонтальной плоскости и ориентирован ортогонально касательной к срединной линии зоны обнаружения объектов в точке пересечения проекции вектора магнитного момента и срединной линии зоны обнаружения объектов. Данное условие определяет конкретный тип средства обнаружения объектов, характеризующийся «узкой» зоной обнаружения. Ширина W так называемой «узкой» зоны обнаружения объектов составляет - 3 м. Данный тип устройств обеспечивает устойчивое обнаружение движущихся биообъектов вблизи крупных движущихся или стационарных электропроводящих объектов.
В качестве контролируемого участка зоны обнаружения объектов используется, по меньшей мере, одна ячейка излучателей и две ячейки измерителей, примыкающие к ячейке излучателей с противоположных сторон. Блок обработки информации и управления содержит два генератора рабочих частот, смеситель сигналов генераторов рабочих частот, модуль подключения излучателей и измерителей, тракт обработки сигналов измерителей, модуль численной обработки сигналов, модуль анализа информации и модуль синхронизации управляющих сигналов. Излучатели и измерители снабжаются блоками включения. Первый выход первого генератора рабочей частоты подключен к излучателям. Первый выход второго генератора рабочей частоты подключен к измерителям. Вторые выходы первого и второго генератора рабочей частоты соединены с входами смесителя сигналов генераторов рабочих частот. Выход смесителя сигналов связан с трактом обработки сигналов измерителей. Первый выход модуля синхронизации управляющих сигналов подключен к входу модуля подключения излучателей и измерителей, выход которого соединен с входами блоков включения излучателей и измерителей. Второй выход модуля синхронизации управляющих сигналов подключен к первому входу модуля численной обработки сигналов. Управляющий вход модуля синхронизации управляющих сигналов связан с выходом смесителя сигналов генераторов рабочих частот. Выход тракта обработки сигналов измерителей соединен со вторым входом модуля численной обработки сигналов, выход которого подключен к входу модуля анализа информации.
Техническое решение, характеризующееся совокупностью описанных выше существенных признаков, позволяет попеременно включать выбранные излучатели и измерители на каждом контролируемом участке зоны обнаружения объектов. За счет попеременного подключения пространственно перекрывающих друг друга групп магнитных диполей «излучатель-измерители» вторичные сигналы, переизлучаемые объектом-нарушителем и принимаемые измерителями, содержат полную и достоверную информацию о пересечении объектом-нарушителем охраняемого рубежа. Сигнал, принимаемый каждым измерителем, обрабатывается в блоке обработки информации и управления, с помощью которого осуществляется синхронизация управляющих сигналов, поступающих в блоки включения излучателей и измерителей. Перечисленные выше функциональные возможности устройства обеспечивают осуществление с его помощью способа обнаружения движущихся электропроводящих объектов и достижение технических результатов, связанных с обнаружением движущихся электропроводящих объектов с требуемым высоким уровнем достоверности обнаружения и точным определением пространственной области зоны обнаружения, в которой произошло нарушение охраняемого рубежа.
В конкретном варианте конструкции устройства тракт обработки сигналов измерителей может содержать фазовращатель и два квадратурных канала обработки сигналов. Каждый квадратурный канал включает в свой состав последовательно соединенные смеситель сигналов, фильтр низких частот, аналогово-цифровой преобразователь и цифровой полосовой фильтр. Первые входы смесителей сигналов квадратурных каналов служат входом тракта обработки сигналов измерителей и подключены к выходам измерителей. Второй вход смесителя сигналов первого квадратурного канала соединен с выходом смесителя сигналов генераторов рабочих частот. Второй вход смесителя сигналов второго квадратурного канала соединен с выходом фазовращателя, вход которого подключен к выходу смесителя сигналов генераторов рабочих частот.
С помощью данного варианта конструкции устройства обеспечивается возможность выделения квадратурных составляющих a и b вторичного сигнала, излучаемого движущимся объектом, для получения полной информации о полезном сигнале. На основании полученных значений a и b с помощью модуля (блока) численной обработки сигналов вычисляется модуль М и фаза Φ полезного сигнала: M=(a2+b2)1/2; Φ=arctg(b/a).
В предпочтительном варианте выполнения конструкции устройства в составе излучателей используются усилители сигнала с двумя входами. Первый вход усилителя служит входом излучателя и соединен с выходом первого генератора рабочей частоты. Второй вход усилителя сигнала подключен к выходу блока включения излучателя. Выход усилителя сигнала соединен с магнитным диполем. С помощью данной схемы подключения осуществляется синхронизация включения излучателей.
Каждый измеритель может быть снабжен смесителем сигналов и полосовым фильтром. Первый вход смесителя сигналов измерителя соединяется с магнитным диполем. Второй вход смесителя сигналов измерителя подключается к выходу второго генератора рабочей частоты. Выход смесителя сигналов измерителя соединяется с входом полосового фильтра, выход которого служит выходом измерителя и соединен с первыми входами смесителей сигналов квадратурных каналов. С помощью данной схемы подключения осуществляется синхронизация включения измерителей.
Расстояние между магнитным диполем любого выбранного излучателя и магнитным диполем измерителя, расположенного в ячейке измерителей, примыкающей к выбранному излучателю, и наиболее удаленного от выбранного излучателя, предпочтительно выбирается в диапазоне от 2 м до 6 м. Аналогичным образом выбирается расстояние между магнитным диполем любого выбранного излучателя и магнитным диполем близлежащего измерителя, расположенного в ячейке измерителей, примыкающей ко второму излучателю ячейки излучателей, в которой расположен выбранный излучатель. Данное расстояние также выбирается в диапазоне от 2 м до 6 м.
Указанные выше оптимальные диапазоны расстояний между магнитными диполями излучателей и измерителей обусловлены, с одной стороны, уменьшением неравномерности амплитуды электромагнитного сигнала вдоль промежутка между работающими излучателем и измерителем, а с другой стороны, - ограничением амплитуды излучаемого электромагнитного сигнала по отношению к амплитуде вторичного полезного сигнала.
Расстояние между магнитными диполями, расположенными в каждой ячейке излучателей или измерителей, для повышения достоверности обнаружения объекта нарушителя целесообразно выбирать не менее 0,5 м. Данное условие характеризует способность достоверного обнаружения объектов-нарушителей определенного вида.
В качестве магнитных диполей могут использоваться рамочные антенны или магнитные ферритовые антенны. Максимальный размер L таких антенн предпочтительно выбирается из условия: L<1/4λ, где λ - длина волны электромагнитного сигнала, передаваемого в зону обнаружения объектов.
Далее группа изобретений поясняется описанием примера осуществления способа обнаружения движущихся электропроводящих объектов с помощью устройства, предназначенного для осуществления способа.
На прилагаемых чертежах изображено следующее:
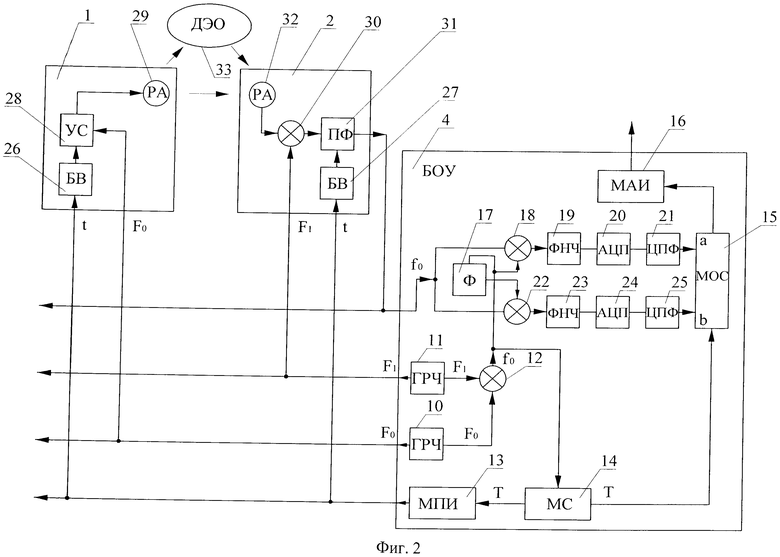
на фиг.1 - схема размещения и ориентации магнитных диполей, входящих в состав устройства, относительно срединной линии зоны обнаружения движущихся объектов;
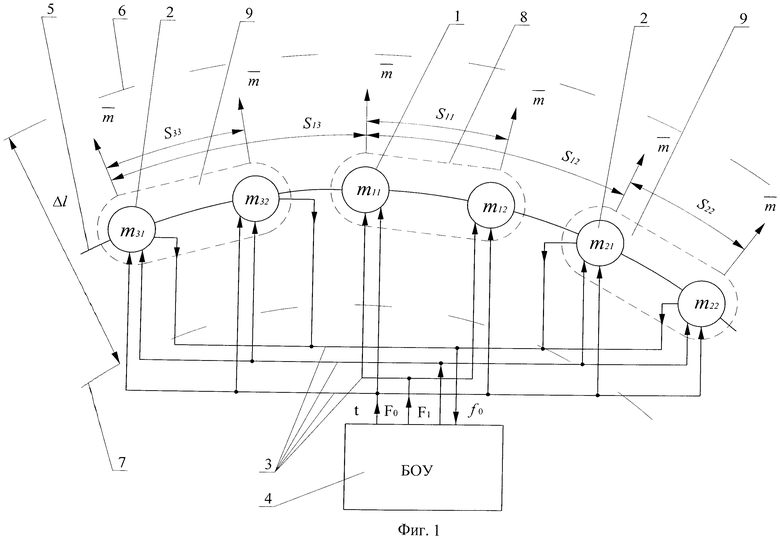
на фиг.2 - функциональная схема устройства для обнаружения движущихся объектов;
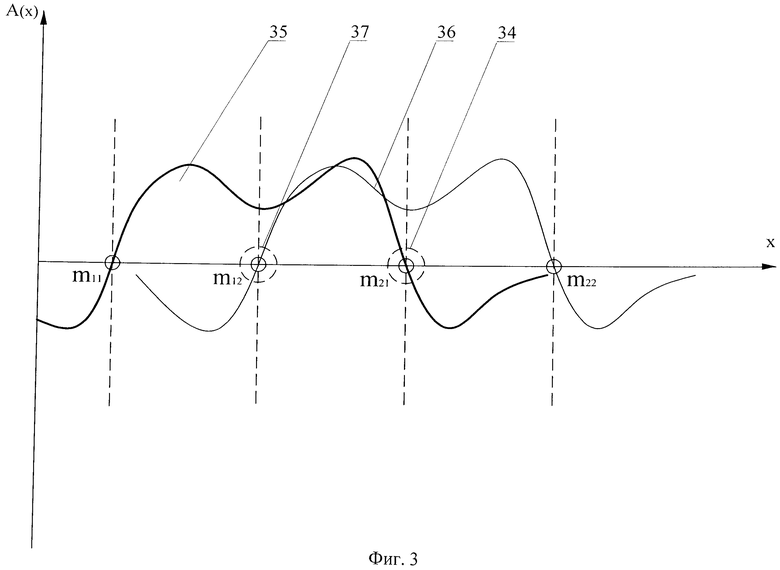
на фиг.3 - графическая зависимость амплитуды электромагнитного сигнала A(x), излучаемого движущимся объектом, в области зоны обнаружения, расположенной между двумя близлежащими ячейками излучателей и измерителей (x - расстояние между центрами магнитных диполей вдоль срединной линии зоны обнаружения объектов).
Устройство, предназначенное для обнаружения движущихся электропроводящих объектов, изображенное на фиг.1 и 2 чертежей, содержит излучатели 1 (m11 и m12) и измерители 2 (m21 и m22, m31 и m32) электромагнитного сигнала. Данные излучатели и измерители образуют контролируемый участок зоны обнаружения движущихся электропроводящих объектов. Антенны излучателей 1 и измерителей 2 выполнены в виде магнитных диполей (элементарных контуров электрического тока). Излучатели 1 и измерители 2 соединены с помощью кабелей связи 3 с блоком 4 обработки информации и управления (БОУ). Магнитные диполи размещаются в поверхностном слое грунта на глубине до одного метра и устанавливаются в один ряд вдоль срединной линии 5 зоны обнаружения объектов. Ширина Δl зоны обнаружения движущихся электропроводящих объектов, ограниченной условными границами 6 и 7, составляет ~3 м. Излучатели 1 и измерители 2 сгруппированы вдоль срединной линии 5 в последовательно чередующиеся ячейки излучателей 8 и ячейки измерителей 9 (m21 и m22, m31 и m32). Каждая ячейка излучателей 8 состоит из двух последовательно соединенных излучателей 1 (m11 и m12), a ячейка измерителей 9 - из двух последовательно соединенных измерителей 2 (m21 и m22, m31 и m32).
Магнитные диполи (антенны излучателей 1 и антенны измерителей 2) на каждом контролируемом участке зоны обнаружения объектов расположены вдоль срединной линии 5 следующим образом: вектор 

Расстояние S13 между магнитными диполями (антеннами) излучателя 1 (m11) и измерителя 2 (m31), расположенного в ячейке измерителей, примыкающей к выбранному излучателю, и наиболее удаленного от выбранного излучателя (m11), равно 4 м. Расстояние S12 между магнитными диполями излучателя 1 (m11) и близлежащего измерителя 2 (m21), расположенного в ячейке измерителей, примыкающей ко второму излучателю ячейки излучателей, в которой расположен выбранный излучатель, в рассматриваемом примере также составляет 4 м. Данные расстояния выбираются в соответствии с условием: 2 м≤S12 (S13)≥6 м.
Расстояния S11 между магнитными диполями (антеннами), расположенными в каждой ячейке излучателей 1 (m11 и m12), выбирается равным 2 м в соответствии с условием: S11≥0,5 м. Аналогичным образом выбираются расстояния S22 и S33 между магнитными диполями (антеннами), расположенными в каждой ячейке измерителей 2. Расстояние S22 и S33 выбираются равными 2 м в соответствии с условием: S22(S33)≥0,5 м.
БОУ 4, функциональная схема которого изображена на фиг.2 чертежей, содержит два генератора рабочих частот (ГРЧ) 10 и 11, смеситель 12 сигналов ГРЧ, модуль 13 подключения излучателей и измерителей (МПИ), модуль 14 синхронизации управляющих сигналов (МС), модуль 15 численной обработки сигналов (МОС), модуль 16 анализа информации (МАИ) и тракт обработки сигналов измерителей.
В состав тракта обработки сигналов измерителей входит фазовращатель 17 и два квадратурных канала обработки сигналов. Первый квадратурный канал содержит последовательно соединенные смеситель сигналов 18, фильтр 19 низких частот (ФНЧ), аналогово-цифровой преобразователь 20 (АЦП) и цифровой полосовой фильтр 21 (ЦПФ). Второй квадратурный канал обработки сигналов содержит последовательно соединенные смеситель сигналов 22, фильтр 23 низких частот (ФНЧ), аналогово-цифровой преобразователь 24 (АЦП) и цифровой полосовой фильтр 25 (ЦПФ). Первые входы смесителей сигналов 18 и 22 служат входом тракта обработки сигналов измерителей и подключены к выходам работающих измерителей 2. Второй вход смесителя сигналов 18 первого квадратурного канала соединен с выходом смесителя сигналов 12. Второй вход смесителя сигналов 22 второго квадратурного канала соединен с выходом фазовращателя 17, вход которого подключен к выходу смесителя сигналов 12.
Излучатели 1 и измерители 2 снабжены блоками включения 26 и 27 (БВ). Первый выход первого ГРЧ 10 подключен к излучателям 1. Первый выход второго ГРЧ 11 подключен к измерителям 2. Вторые выходы первого и второго ГРЧ 10 и 11 соединены с входами смесителя 12 сигналов ГРЧ. Выход смесителя 12 связан с трактом обработки сигналов измерителей. Первый выход МС 14 подключен к входу МПИ 13. Выход МПИ 13 соединен с входами БВ 26 и 27. Второй выход МС 14 подключен к первому входу МОС 15. Управляющий вход МС 12 связан с выходом смесителя сигналов 12. Выход тракта обработки сигналов измерителей соединен со вторым входом МОС 15. Выход МОС 15 подключен к входу МАИ 16.
Каждый излучатель 1 снабжен усилителем сигнала 28 (УС) с двумя входами. Первый вход УС 28 служит входом излучателя 1 и соединен с выходом первого ГРЧ 10. Второй вход УС 28 подключен к выходу БВ 26. Выход УС 28 соединен с рамочной антенной 29 (PA).
Каждый измеритель 2 снабжен смесителем сигналов 30 и полосовым фильтром 31 (ПФ). Первый вход смесителя сигналов 30 соединен с РА 32. Второй вход смесителя сигналов 30 подключен к выходу второго ГРЧ 11. Выход смесителя сигналов 30 соединен с входом ПФ 31, выход которого служит выходом измерителя 2. Выход ПФ 31 соединен с первыми входами смесителей 18 и 22 квадратурных каналов обработки сигналов.
Излучатели 1 и измерители 2 с РА 29 и 32 располагаются в зоне обнаружения движущихся электропроводящих объектов 33 (ДЭО), пересекающих охраняемый рубеж. В качестве магнитных диполей, выполняющих функции антенн излучателей 1 и измерителей 2, в рассматриваемом примере выполнения устройства используются рамочные антенны. РА 29 и 32 имеют форму квадрата со стороной, равной 8 см. Размеры антенн 29 и 32 выбраны из следующего условия: L<1/4λ, где L - максимальный размер рамочной антенны, λ=10 м - длина волны электромагнитного сигнала, передаваемого в зону обнаружения объектов. При этом характерный размер D объекта, подлежащего обнаружению, может быть существенно меньше длины волны λ: D<<λ. В рассматриваемом примере осуществления изобретения характерный размер ДЭО 33 вдоль срединной линии зоны обнаружения составляет ~0,5 м.
Работа устройства, предназначенного для реализации способа обнаружения движущихся электропроводящих объектов, осуществляется следующим образом.
Герметичные контейнеры, в которых размещаются излучатели 1 и измерители 2, устанавливаются в поверхностном слое грунта вдоль срединной линии 5 зоны обнаружения объектов, ограниченной условными границами 6 и 7 (см. фиг.1). Измерители 1 и излучатели 2 соединяются кабелями связи 3 и подключаются к БОУ 4. Размещение излучателей и измерителей производят в один ряд в виде последовательно чередующихся ячеек излучателей и ячеек измерителей. Через РА 29 производится передача электромагнитных сигналов с частотой F0=30 МГц в зону обнаружения ДЭО 33. Прием электромагнитных сигналов, переизлученных движущимся электропроводящих объектом 33, производится с помощью РА 32, входящих в состав измерителей.
Использование в качестве антенн, входящих в состав излучателей и измерителей, магнитных диполей, выполненных в виде рамочных антенн, позволяет существенно снизить зависимость параметров антенн от состояния окружающей среды. За счет применения магнитных диполей излучатели и измерители могут размещаться в среде с медленно изменяющимися электрическими параметрами: в промокающем грунте, на мелководье, в траве, вблизи кустарников и т.п.
Движущиеся биообъекты, обладающие высокой диэлектрической проницаемостью (ε≥80) и отличной от нуля электрической проводимостью (Gуд≥0,5 См/м), поляризуются в излучаемом высокочастотном электромагнитном поле и, вследствие этого, становятся вторичными излучателями электромагнитного поля. Параметры вторичного электромагнитного поля связаны с геометрическими размерами ДЭО и его местоположением относительно антенн излучателей и измерителей. Суперпозиция электромагнитных сигналов в зоне обнаружения движущихся объектов носит сложный интерференционный характер. Регистрация суперпозиции первичного (излучаемого) и вторичного (переизлучаемого) электромагнитных полей производится с помощью измерителей 2. Обработка зарегистрированных электромагнитных сигналов осуществляется в БОУ 4. По результатам измерений и сравнения обработанных электромагнитных сигналов с пороговым значением определяется наличие ДЭО и их местоположение.
Ширина Δl зоны обнаружения движущихся электропроводящих объектов, ограниченная условными границами 6 и 7, определяет условия работы устройства в режиме с «узкой» зоной обнаружения. В рассматриваемом примере реализации изобретения Δl=3 м. В данном режиме работы при пересечении охраняемого рубежа объектом-нарушителем непосредственно над излучателями 1 и измерителями 2 возникают узкие пространственные зоны («коридоры») с минимальным (близким к нулевому значению) уровнем сигнала. Ширина таких зон соизмерима с характерным размером биообъекта-нарушителя (D≅0,5 м) вдоль срединной линии зоны обнаружения. При пересечении объектом-нарушителем зоны обнаружения через «коридоры», в которых проявляется низкая чувствительность устройства, существенно снижается вероятность обнаружения ДЭО. Для исключения потери чувствительности устройства и пропуска объекта-нарушителя через охраняемый рубеж без соответствующей сигнализации в процессе работы устройства образуются взаимно перекрывающиеся области обнаружения ДЭО.
Образование перекрывающихся областей обнаружения реализуется посредством определенной последовательности включения и выключения излучателей 1 и измерителей 2 на каждом контролируемом участке зоны обнаружения. Передачу электромагнитного сигнала на контролируемом участке в каждый момент времени осуществляют с помощью одного излучателя, расположенного в выбранной ячейке излучателей. Прием электромагнитного сигнала производят через измерители, находящихся в двух ячейках измерителей, примыкающих к выбранной ячейке излучателей, в которой расположен работающий излучатель. Первоначально включают первый излучатель 1 (m11) в выбранной ячейке излучателей (см. фиг.1). Прием электромагнитного сигнала производят раздельно с помощью двух измерителей 2 (m31 и m21), расположенных на расстояниях S13 и S12 от выбранного излучателя 1 (m11). Первый из работающих измерителей m31 расположен в ячейке измерителей, примыкающей к первому излучателю m11, и наиболее удален от первого работающего излучателя m11. Второй работающий измеритель m21 расположен в противоположной ячейке измерителей, примыкающей ко второму излучателю m12 в выбранной ячейке излучателей.
После прекращения передачи и приема электромагнитного сигнала, передаваемого первым излучателем m11, включают второй излучатель m12 в выбранной ячейке излучателей. Прием сигнала в этом случае также производят с помощью двух измерителей 2 (m22 и m33). Первый работающий измеритель m22 расположен в ячейке измерителей, примыкающей ко второму излучателю m12, и наиболее удален от второго излучателя m12. Второй работающий измеритель m32 находится в противоположной ячейке измерителей, примыкающей к первому излучателю m11, который в текущий момент времени выключен и не работает. Из двух измерителей 2 (m31 и m32), расположенных в данной ячейке, в качестве второго измерителя, работающего в рассматриваемый момент времени, используется измеритель m32, близлежащий по отношению ко второму излучателю m12.
Вследствие использования указанной последовательности включения магнитных диполей регистрируются парные сигналы при включении одного излучателя 1, расположенного в выбранной ячейке излучателей. Область 34 пониженной чувствительности сигнала над измерителем m21, которая образуется при включении первого излучателя m11, расположена непосредственно над первым измерителем m21 в ячейке измерителей и соразмерна с характерным размером ДЭО D≅0,5 м (см. фиг.3 чертежей). Амплитуда A(x) электромагнитного сигнала 35, генерируемого первым излучателем m11 в ячейке излучателей, в области 34 снижается до нулевого значения. При последующем включении второго излучателя m12 область 34 пониженной чувствительности сигнала перекрывается электромагнитным сигналом 36, генерируемым вторым излучателем m12. Амплитуда A(x) электромагнитного сигнала 36 в области, расположенной непосредственно над первым измерителем m11, в данный момент времени имеет близкое к максимальному значение.
Следует отметить, что при включении второго излучателя m12 непосредственно над излучателем образуется область 37 пониженной чувствительности сигнала (см. фиг.3 чертежей). В данный момент времени амплитуда A(x) электромагнитного сигнала 36 в области 37 близка к нулевому значению. Однако при включении первого излучателя m11, находящегося в выбранной ячейке излучателей, область 37 перекрывается электромагнитным сигналом 35, амплитуда A(x) которого над областью 37 имеет близкое к максимальному значение. Таким образом, при последовательном включении двух излучателей m11 и m12, расположенных в одной ячейке излучателей, в каждой из двух примыкающих ячеек измерителей регистрируются два электромагнитных сигнала 35 и 36, которые взаимно перекрывают области 34 и 37 пониженной чувствительности сигнала, расположенные непосредственно над магнитными диполями. В результате реализации указанного алгоритма включения магнитных диполей электромагнитные сигналы, зарегистрированные на каждом контролируемом участке охраняемого рубежа, в совокупности содержат полный объем информации, который необходим для обнаружения ДЭО. За счет синхронизации работы измерителей с работой излучателей осуществляется раздельный прием сигналов от каждого работающего излучателя. При этом в каждый момент времени на контролируемом участке охраняемого рубежа работает только один излучатель. Последующий сравнительный анализ обработанных сигналов, полученных от различных измерителей, позволяет достоверно обнаруживать ДЭО, пересекающие охраняемый рубеж, и выделять объекты-нарушители, обладающие определенными параметрами.
Процесс передачи и приема электромагнитного сигнала периодически повторяют для всех ячеек излучателей 1 и измерителей 2 каждого контролируемого участка зоны обнаружения. Частота включения излучателей и измерителей в рассматриваемом примере реализации изобретения составляет 100 Гц. Наличие ДЭО и их местоположение относительно границы охраняемого рубежа определяется с помощью БОУ 4 путем сравнения электромагнитных сигналов, зарегистрированных при включении первого и второго излучателей каждой ячейки излучателей, с пороговым значением сигнала.
Описанная выше последовательность включения и выключения излучателей и измерителей, а также процесс обработки зарегистрированных сигналов осуществляется с помощью устройства для обнаружения ДЭО, функциональная схема которого изображена на фиг.2 чертежей.
Управление работой излучателей 1 и измерителей 2, коммутация регистрируемых сигналов и их обработка осуществляется в БОУ 4. При включении устройства ГРЧ 10 и 11, входящие в состав БОУ 4, начинают вырабатывать опорные сигналы с частотами F0 и F1 соответственно. Сигналы с частотой F0, вырабатываемые первым ГРЧ 10, поступают в излучатели 1 через первый вход УС 28. Сигналы с частотой F1, вырабатываемые вторым ГРЧ 11, поступают в измерители 2 через второй вход смесителя сигналов 30. Одновременно сигналы с частотами F0 и F1 со вторых выходов ГРЧ 10 и 11 передаются на входы смесителя сигналов 12. Выделенный сигнал с разностной частотой f0=F0-F1 поступает с выхода смесителя сигналов 12 на входы квадратурных каналов тракта обработки сигналов. С помощью фазовращателя 17 производится фазовый сдвиг сигнала, который направляется в смеситель сигналов 18 первого квадратурного канала. В результате в тракте обработки сигналов формируются два опорных сигнала с частотой f0 и относительным фазовым сдвигом π/2. Данные опорные сигналы в дальнейшем используются для выделения квадратурных составляющих принимаемого сигнала.
Сигнал, вырабатываемый МС 14, используется в качестве управляющего сигнала Т, посредством которого обеспечивается включение в каждый момент времени одного излучателя 1 и двух измерителей 2, расположенных в ячейках измерителей, примыкающих к ячейке излучателей, в которой находится работающий излучатель 1. Управляющий сигнал Т с первого выхода МС 14 поступает на вход МПИ 13, который вырабатывает управляющие сигналы t, передаваемые непосредственно на входы БВ 26 и 27, с помощью которых осуществляется приведение в активное состояние (включение) выбранного излучателя 1 и двух выбранных измерителей 2. Все остальные излучатели и измерители на контролируемом участке зоны обнаружения в текущий момент времени переводятся в пассивное (выключенное) состояние. Управляющий сигнал Т со второго выхода МС 14 передается на управляющий вход МОС 15 с целью синхронизации процесса обработки принимаемого электромагнитного сигнала.
В выбранном (работающем) излучателе 1 по сигналу, генерируемому БВ 26, производится включение УС 28, с помощью которого осуществляется усиление опорного сигнала с частотой F0 до заданного уровня мощности. Усиленный сигнал излучается в окружающее пространство с помощью РА 29. За счет ориентации магнитного диполя (РА 29) таким образом, что вектор
При включении двух выбранных измерителей 2, расположенных в ячейках измерителей, примыкающих к ячейке излучателей, в которой находится работающий излучатель, электромагнитный сигнал, принимаемый РА 32, поступает через первый вход в смеситель сигналов 30. При этом через второй вход в смеситель сигналов 30 передается опорный сигнал с частотой F1, который вырабатывается вторым ГРЧ 11. Следует отметить, что принимаемый сигнал с частотой F0 представляет собой суперпозицию излучаемого электромагнитного сигнала с амплитудой A(x) и вторичного электромагнитного сигнала, переизлучаемого ДЭО 33. Принимаемый сигнал, перемножаясь в смесителе сигналов 30 с опорным сигналом, имеющим частоту F1, преобразуется после частотной фильтрации в ПФ 31 в выделенный сигнал разностной частоты f0=F0-F1. Включение ПФ 31 производится управляющим сигналом, вырабатываемым БВ 27. После фильтрации сигнал передается на вход тракта обработки сигнала, входящего в состав БОУ 4.
В БОУ 4 сигнал разностной частоты f0=F0-F1 разделяется в квадратурных каналах обработки сигналов на две составляющие, представляющие собой проекции AX и AY принимаемого измерителем сигнала A. Для этого опорный сигнал с частотой f0, передаваемый на второй вход смесителя сигналов 22 второго квадратурного канала, приобретает фазовый сдвиг на π/2 с помощью фазовращателя 17. Процесс формирования двух составляющих принимаемого сигнала осуществляется с помощью смесителей сигналов 18 и 22 соответственно первого и второго квадратурного канала обработки сигналов. Каждая составляющая сигнала AX и AY проходит аналоговую фильтрацию в ФНЧ 19 и 23 соответственно. После фильтрации составляющие сигнала преобразуются в цифровой вид с помощью АЦП 20 и 24. Затем цифровые сигналы проходят цифровую фильтрацию в ЦПФ 21 и 25, с помощью которых из проекций AX и AY принимаемого сигнала выделяются квадратурные сигналы a и b, характеризующие ДЭО. Частотная фильтрация в ЦПФ 21 и 25 производится в диапазоне от тысячных долей до единиц герц. Данная полоса частот соответствует ожидаемым скоростям объектов, которые подлежат обнаружению. Выделенные цифровые сигналы a и b представляют собой квадратурные составляющие сигнала объекта с разностной частотой f0.
Цифровые сигналы a и b передаются далее на вход в МОС 15, в котором с помощью программных средств расчета производится вычисление модуля М=(а2+b2)1/2 и фазы Φ=arctg(b/a) принимаемого сигнала. Данные параметры М и Φ в отдельности, а также комбинация параметров М и Ф, полученных от двух измерителей в текущий момент времени, используются в качестве значимых параметров при анализе полученной информации в МАИ 16. Проводимый анализ заключается в сравнении значимых параметров сигналов, полученных от различных пар измерителей 2 на каждом контролируемом участке зоны обнаружения объектов. Обработанные сигналы в текущий момент времени сравниваются с одним или несколькими заранее заданными пороговыми значениями сигнала, которые характеризуют определенные виды движущихся электропроводящих объектов и их размеры. При этом учитывается, что величина регистрируемого сигнала пропорциональна геометрическим размерам (пространственному объему) объекта-нарушителя.
По результатам сравнения устанавливается факт нарушения границы охраняемого рубежа и местоположение объекта-нарушителя относительно охраняемого рубежа. Местоположение объекта-нарушителя определяется на основании информации о местоположении излучателя и измерителей, с помощью которых был зафиксирован сигнал с максимальной амплитудой, характеризующей вторичное излучение (переизлучение) объекта-нарушителя. В случае соответствия результатов расчетов исходным данным об объекте-нарушителе МАИ 16 формирует сигнал тревоги и извещает о контролируемом участке зоны обнаружения, на котором произошло нарушение охраняемого рубежа.
Заданный алгоритм работы БОУ 4 совместно со свойствами магнитных диполей, применяемых в качестве антенн излучателей и измерителей, позволяет с высокой достоверностью обнаруживать движущиеся электропроводящие объекты в «узкой» зоне обнаружения с шириной ~3 м. Данный результат связан с селективностью диаграммы направленности магнитных диполей и определенной последовательностью включения магнитных диполей (излучателей и измерителей). Следует отметить, что средство обнаружения движущихся электропроводящих объектов может отстраиваться от помех, создаваемых крупными объектами, перемещающимися вдоль охраняемого рубежа, например электропоездами и протяженными транспортными средствами, и от внешних эфирных помех. Локальная регулировка средства обнаружения может производиться с точностью до расстояния между работающим излучателем и измерителями, принимающими сигнал. За счет контролирования в текущий момент времени работающих излучателей и измерителей место нарушения охраняемого рубежа определяется с точностью до расстояния между работающим излучателем и измерителями, принимающими сигнал.
При работе средства обнаружения в соответствии с заданным алгоритмом исключается возможность возникновения пространственных зон пониженной чувствительностью вблизи вертикальных плоскостей, проходящих через векторы магнитных моментов антенн, и достигается равномерное распределение зоны достоверного обнаружения движущегося объекта вдоль всего периметра охраняемого рубежа. Решение данных технических задач обеспечивает требуемый высокий уровень достоверности обнаружения ДЭО, в первую очередь слабо электропроводящих биообъектов. При этом может быть точно определена пространственная область зоны обнаружения, в которой произошло нарушение охраняемого рубежа.
Описанный выше пример осуществления изобретения основан на использовании конкретного устройства, предназначенного для осуществления способа обнаружения движущихся электропроводящих объектов, однако возможны и другие варианты осуществления способа обнаружения и выполнения средства обнаружения, основанные на изобретении. Так, в частности, в качестве магнитных диполей могут применяться различные виды магнитных антенн, в том числе магнитные ферритовые антенны. Расстояние между магнитными диполями выбирается в зависимости от характерных размеров объектов, подлежащих обнаружению. Частота повторения циклов передачи и приема электромагнитного сигнала может изменяться в широком диапазоне в зависимости от скорости перемещения объектов относительно границы охраняемого рубежа. Процесс передачи и приема электромагнитного сигнала может периодически повторяться для ячеек излучателей и измерителей, расположенных на одном или нескольких выбранных контролируемых участках зоны обнаружения. Для обработки принимаемого электромагнитного сигнала в зависимости от выбора конкретных значимых параметров сигнала могут применяться различные схемные решения тракта обработки сигналов измерителей. Синхронизация работы излучателей и измерителей, включаемых по заданному алгоритму, может производиться с помощью различных вариантов выполнения схем управления.
Изобретение может найти широкое применение в системах охранной сигнализации для обнаружения с высокой достоверностью ДЭО как на локальных, так и на протяженных охраняемых рубежах, повторяющих рельеф местности. Способ и устройство, предназначенное для его осуществления, обеспечивают достоверное селективное обнаружение движущихся, обладающих комбинацией параметров: электропроводностью, диэлектрической проницаемостью, пространственными размерами и объемом.
Перечень цифровых и сокращенных буквенных обозначений структурных элементов устройства для обнаружения движущихся электропроводящих объектов и графических элементов, изображенных на фиг.1, 2 и 3 чертежей.
1 - излучатель;
2 - измеритель;
3 - кабели связи;
4 - блок обработки информации и управления (БОУ);
5 - срединная линия зоны обнаружения объектов;
6 и 7 - границы зоны обнаружения объектов;
8 - ячейка излучателей;
9 - ячейка измерителей;
10 - первый генератор рабочих частот (ГРЧ);
11 - второй генератор рабочих частот (ГРЧ);
12 - смеситель сигналов ГРЧ;
13 - модуль подключения излучателей и измерителей (МПИ);
14 - модуль синхронизации управляющих сигналов (МС);
15 - модуль численной обработки сигналов (МОС);
16 - модуль анализа информации (МАИ);
17 - фазовращатель;
18 - смеситель сигналов первого квадратурного канала обработки сигналов;
19 - фильтр низких частот (ФНЧ) первого квадратурного канала обработки сигналов;
20 - аналогово-цифровой преобразователь (АЦП) первого квадратурного канала обработки сигналов;
21 - цифровой полосовой фильтр (ЦПФ) первого квадратурного канала обработки сигналов;
22 - смеситель сигналов второго квадратурного канала обработки сигналов;
23 - фильтр низких частот (ФНЧ) второго квадратурного канала обработки сигналов;
24 - аналогово-цифровой преобразователь (АЦП) второго квадратурного канала обработки сигналов;
25 - цифровой полосовой фильтр (ЦПФ) второго квадратурного канала обработки сигналов;
26 - блок включения (БВ) излучателей;
27 - блок включения (БВ) измерителей;
28 - усилитель сигналов (УС);
29 - рамочная антенна (РА) излучателя;
30 - смеситель сигналов излучателя;
31 - полосовой фильтр (ПФ);
32 - рамочная антенна (РА) измерителя;
33 - движущийся электропроводящий объект (ДЭО);
34 - область пониженной чувствительности сигнала над измерителем;
35 - электромагнитный сигнал, генерируемый первым излучателем ячейки излучателей;
36 - электромагнитный сигнал, генерируемый вторым излучателем ячейки излучателей;
37 - область пониженной чувствительности сигнала над излучателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ | 2005 |
|
RU2303290C2 |
| РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2005 |
|
RU2292600C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ПРИ ИХ ВТОРЖЕНИИ В ОХРАНЯЕМУЮ ЗОНУ | 2013 |
|
RU2559701C2 |
| Многозональный способ обнаружения нарушителя | 2019 |
|
RU2724803C1 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ЗОНУ | 1998 |
|
RU2133046C1 |
| СПОСОБ ОХРАНЫ ВОДНЫХ РУБЕЖЕЙ | 2008 |
|
RU2364883C1 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2346335C2 |
| СПОСОБ ОХРАНЫ ОБЪЕКТОВ ОТ ПРОНИКНОВЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ МАЛОРАЗМЕРНЫХ МАЛОВЫСОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ТИПА БПЛА) | 2019 |
|
RU2744497C2 |
| Дистанционно устанавливаемый радиоволновый извещатель и способ его применения | 2019 |
|
RU2724146C1 |
Изобретение относится к средствам охранной сигнализации и методам обнаружения движущихся электропроводящих объектов, пересекающих охраняемый рубеж. Технический результат заключается в повышении достоверности обнаружения движущихся электропроводящих биообъектов и точности определения пространственной области зоны обнаружения, в которой произошло нарушение охраняемого рубежа. Изобретение характеризуется следующим. Антенны излучателей (1) и измерителей (2) электромагнитного сигнала выполнены в виде магнитных диполей. Излучатели (1) и измерители (2) размещают вдоль срединной линии (5) зоны обнаружения объектов. Магнитные диполи устанавливают в один ряд в виде последовательно чередующихся ячеек излучателей (8) и ячеек измерителей (9). Каждая ячейка излучателей (8) и ячейка измерителей (9) состоит из двух последовательно соединенных магнитных диполей. Вектор магнитного момента 
1. Способ обнаружения движущихся электропроводящих объектов, включающий размещение вдоль срединной линии зоны обнаружения объектов излучателей электромагнитного сигнала, соединенных между собой кабелем связи, и измерителей электромагнитного сигнала, соединенных между собой кабелем связи, при этом используют излучатели и измерители с антеннами, выполненными в виде магнитных диполей, излучатели и измерители устанавливают в один ряд в виде последовательно чередующихся ячеек излучателей, каждая из которых состоит из двух последовательно соединенных излучателей, и ячеек измерителей, каждая из которых состоит из двух последовательно соединенных измерителей, передачу электромагнитных сигналов в зону обнаружения объектов осуществляют с помощью излучателей, прием электромагнитных сигналов производят с помощью измерителей, принятые электромагнитные сигналы обрабатывают и определяют по результатам измерений наличие движущихся электропроводящих объектов и их местоположение, отличающийся тем, что магнитные диполи на каждом контролируемом участке зоны обнаружения объектов размещают вдоль срединной линии зоны обнаружения объектов таким образом, что вектор магнитного момента каждого магнитного диполя расположен в горизонтальной плоскости и ориентирован ортогонально касательной к срединной линии зоны обнаружения объектов в точке пересечения проекции вектора магнитного момента и срединной линии зоны обнаружения объектов, при этом в качестве контролируемого участка зоны обнаружения объектов используют, по меньшей мере, одну ячейку излучателей и две ячейки измерителей, примыкающие к ячейке излучателей с противоположных сторон, передачу электромагнитного сигнала на контролируемом участке зоны обнаружения объектов в каждый момент времени осуществляют с помощью одного излучателя в выбранной ячейке излучателей, прием электромагнитного сигнала производят с помощью двух измерителей, расположенных в двух ячейках измерителей, примыкающих к выбранной ячейке работающего излучателя, причем первоначально включают первый излучатель в выбранной ячейке излучателей и осуществляют прием электромагнитного сигнала с помощью наиболее удаленного от первого излучателя измерителя, расположенного в ячейке измерителей, примыкающей к первому излучателю, и с помощью близлежащего к первому излучателю измерителя, расположенного в противоположной ячейке измерителей, примыкающей ко второму излучателю в выбранной ячейке излучателей, после прекращения передачи и приема электромагнитного сигнала, передаваемого первым излучателем, включают второй излучатель в выбранной ячейке излучателей и осуществляют прием электромагнитного сигнала с помощью наиболее удаленного от второго излучателя измерителя, расположенного в ячейке измерителей, примыкающей ко второму излучателю, и с помощью близлежащего ко второму излучателю измерителя, расположенного в противоположной ячейке измерителей, примыкающей к первому излучателю, причем наличие движущихся электропроводящих объектов и местоположение объектов определяют путем сравнения электромагнитных сигналов, полученных при включении первого и второго излучателей каждой ячейки излучателей на контролируемом участке зоны обнаружения, с пороговым значением сигнала.
2. Способ по п.1, отличающийся тем, что процесс передачи и приема электромагнитного сигнала периодически повторяют для всех ячеек излучателей и измерителей каждого контролируемого участка зоны обнаружения.
3. Способ по п.2, отличающийся тем, что процесс передачи и приема электромагнитного сигнала периодически повторяют с частотой в диапазоне от 20 Гц до 200 Гц.
4. Способ по п.1, отличающийся тем, что расстояние между магнитным диполем излучателя, с помощью которого осуществляют передачу электромагнитного сигнала в выбранный момент времени, и магнитным диполем каждого из двух измерителей, с помощью которых осуществляют прием электромагнитного сигнала в выбранный момент времени, устанавливают в диапазоне от 2 м до 6 м.
5. Способ по п.1, отличающийся тем, что расстояние между магнитными диполями, расположенными в каждой ячейке излучателей или измерителей, выбирают не менее 0,5 м.
6. Способ по п.1, отличающийся тем, что частоту передаваемого электромагнитного сигнала выбирают в диапазоне от 10 МГц до 40 МГц.
7. Способ по п.1, отличающийся тем, что в качестве магнитных диполей используют рамочные антенны, максимальный размер L которых выбран из условия: L<1/4λ, где λ - длина волны электромагнитного сигнала, передаваемого в зону обнаружения объектов.
8. Способ по п.1, отличающийся тем, что в качестве магнитных диполей используют магнитные ферритовые антенны, максимальный размер L которых выбран из условия: L<1/4λ, где λ - длина волны электромагнитного сигнала, передаваемого в зону обнаружения объектов.
9. Устройство для обнаружения движущихся электропроводящих объектов, включающее в свой состав излучатели и измерители электромагнитного сигнала с антеннами, выполненными в виде магнитных диполей, блок обработки информации и управления и кабели связи, соединяющие излучатели и измерители с блоком обработки информации и управления, при этом излучатели и измерители установлены вдоль срединной линии зоны обнаружения объектов в один ряд в виде последовательно чередующихся ячеек излучателей, каждая из которых состоит из двух последовательно соединенных излучателей, и ячеек измерителей, каждая из которых состоит из двух последовательно соединенных измерителей, отличающееся тем, что магнитные диполи на каждом контролируемом участке зоны обнаружения объектов размещены вдоль срединной линии зоны обнаружения объектов таким образом, что вектор магнитного момента каждого магнитного диполя расположен в горизонтальной плоскости и ориентирован ортогонально касательной к срединной линии зоны обнаружения объектов в точке пересечения проекции вектора магнитного момента и срединной линии зоны обнаружения объектов, при этом контролируемый участок зоны обнаружения объектов содержит, по меньшей мере, одну ячейку излучателей и две ячейки измерителей, примыкающие к ячейке излучателей с противоположных сторон, причем блок обработки информации и управления содержит два генератора рабочих частот, смеситель сигналов генераторов рабочих частот, модуль подключения излучателей и измерителей, тракт обработки сигналов измерителей, модуль численной обработки сигналов, модуль анализа информации и модуль синхронизации управляющих сигналов, при этом излучатели и измерители снабжены блоками включения, первый выход первого генератора рабочей частоты подключен к излучателям, первый выход второго генератора рабочей частоты подключен к измерителям, вторые выходы первого и второго генератора рабочей частоты соединены с входами смесителя сигналов генераторов рабочих частот, выход которого связан с трактом обработки сигналов измерителей, первый выход модуля синхронизации управляющих сигналов подключен к входу модуля подключения излучателей и измерителей, выход которого соединен с входами блоков включения излучателей и измерителей, второй выход модуля синхронизации управляющих сигналов подключен к первому входу модуля численной обработки сигналов, управляющий вход модуля синхронизации управляющих сигналов связан с выходом смесителя сигналов генераторов рабочих частот, выход тракта обработки сигналов измерителей соединен со вторым входом модуля численной обработки сигналов, выход которого подключен к входу модуля анализа информации.
10. Устройство по п.9, отличающееся тем, что тракт обработки сигналов измерителей содержит фазовращатель и два квадратурных канала обработки сигналов, каждый из которых включает в свой состав последовательно соединенные смеситель сигналов, фильтр низких частот, аналогово-цифровой преобразователь и цифровой полосовой фильтр, при этом первые входы смесителей сигналов квадратурных каналов служат входом тракта обработки сигналов измерителей и подключены к выходам измерителей, второй вход смесителя сигналов первого квадратурного канала соединен с выходом смесителя сигналов генераторов рабочих частот, второй вход смесителя сигналов второго квадратурного канала соединен с выходом фазовращателя, вход которого подключен к выходу смесителя сигналов генераторов рабочих частот.
11. Устройство по п.10, отличающееся тем, что каждый излучатель снабжен усилителем сигнала с двумя входами, при этом первый вход усилителя служит входом излучателя и соединен с выходом первого генератора рабочей частоты, второй вход усилителя сигнала подключен к выходу блока включения излучателя, а выход усилителя сигнала соединен с магнитным диполем.
12. Устройство по п.10, отличающееся тем, что каждый измеритель снабжен смесителем сигналов и полосовым фильтром, при этом первый вход смесителя сигналов измерителя соединен с магнитным диполем, второй вход смесителя сигналов измерителя подключен к выходу второго генератора рабочей частоты, выход смесителя сигналов измерителя соединен с входом полосового фильтра, выход которого служит выходом измерителя и соединен с первыми входами смесителей сигналов квадратурных каналов.
13. Устройство по п.9, отличающееся тем, что расстояние между магнитным диполем любого выбранного излучателя и магнитным диполем измерителя, расположенного в ячейке измерителей, примыкающей к выбранному излучателю, и наиболее удаленного от выбранного излучателя, и расстояние между магнитным диполем любого выбранного излучателя и магнитным диполем близлежащего измерителя, расположенного в ячейке измерителей, примыкающей ко второму излучателю ячейки излучателей, в которой расположен выбранный излучатель, составляет от 2 м до 6 м.
14. Устройство по п.9, отличающееся тем, что расстояние между магнитными диполями, расположенными в каждой ячейке излучателей или измерителей, составляет не мене 0,5 м.
15. Устройство по п.9, отличающееся тем, что в качестве магнитных диполей использованы рамочные антенны, максимальный размер L которых выбран из условия: L<1/4λ, где λ - длина волны электромагнитного сигнала, передаваемого в зону обнаружения объектов.
16. Устройство по п.9, отличающееся тем, что в качестве магнитных диполей использованы магнитные ферритовые антенны, максимальный размер L которых выбран из условия: L<1/4λ, где λ - длина волны электромагнитного сигнала, передаваемого в зону обнаружения объектов.
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ | 2005 |
|
RU2303290C2 |
| US 8014111 B2, 06.09.2011 | |||
| СЕЙСМОМАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2210116C2 |
| RU 2071121 C1, 27.12.1996 | |||
| Способ регистрации расположения движущихся металлических объектов и устройство для его осуществления | 1982 |
|
SU1246905A3 |
| US 7576648 B2, 18.08.2009 | |||
| EP 1743271 B1, 18.01.2012. | |||

