Предлагаемое изобретение относится к технике обнаружения цели под водой, а именно, к устройствам активной физической защиты периметров объектов и может быть использовано для охраны периметров подводной части акваторий от несанкционированного проникновения на охраняемый объект движущихся подводных объектов (подводных пловцов в легководолазном снаряжении, средств их доставки, самотранспортирующихся и плавающих мин, подводных телеуправляемых, автономных и обитаемых подводных аппаратов (ПА) и т.д.).
На сегодняшний день известны системы охраны подводной части акваторий, которые условно можно разделить на несколько категорий:
1. Гидроакустические системы,
2. Пассивные магнитометрические системы,
3. Активные электромагнитные системы,
4. Системы физического барьера, оснащенные чувствительным элементом (сети, решетки и т.д.).
В качестве примеров известных гидроакустических систем можно привести следующие системы:
1. ГАС Нерпа - М (http://www.tetis-ks.ru/catalog/229/1212);
2. ГАС Трал (http://www.tetis-ks.ru/catalog/229/1211);
3. Патент РФ №2271551 «Способ обнаружения подводных объектов и устройство для его осуществления» (см. патент РФ №2271551, МПК: G01S 15/00, G01S 3/80, опубл. 10.03.2006).
Области применения гидроакустических систем (ГАС) ограничены в связи с высоким разнообразием реверберационных помех, препятствующих эффективной работе данных устройств. Эти помехи возникают вследствие отражения излучаемого передатчиком сигнала от различных поверхностей, обусловленных мелководьем, сложным рельефом дна, волнением водной поверхности, отражением от берегов каналов, морских животных и стай рыб в охраняемых водоемах. Из-за того, что частота излучаемого сигнала гидроакустической системы и сигнал помехи обычно имеют одну и ту же несущую частоту или близкую к ней, то задачи обеспечения эффективной работы системы подразумевают сложные технические решения. При условии, что уровень сигнала помех равен по интенсивности полезному сигналу, то выделить полезный сигнал от объекта практически невозможно. Также существенным недостатком гидроакустического просветного способа является то, что наблюдение объекта в окрестности базисной линии излучатель - приемник происходит на фоне прямого сигнала, излучаемого передатчиком, который является и основной помехой, всегда превосходящей по уровню сигнал, рассеянный от объекта вперед. В связи с этим в принимаемом сигнале не просматривается существенных различий от сигнала цели или ее отсутствия.
Данный недостаток существенно ограничивает применение гидроакустических систем для охраны непосредственно периметра объекта.
В связи с этим гидроакустические станции (ГАС), в основном, применяются в качестве предупредительного средства и устанавливаются за периметром охраняемого участка в качестве первого (предупредительного) рубежа охраны.
Итак, основным недостатком гидроакустических систем можно назвать их работу на одной несущей частоте. Обычно используют частоты в 50 кГц, 200 кГц, 400 кГц, 800 кГц. При этом при увеличении частоты увеличивается разрешающая способность системы и уменьшается дальность обнаружения объекта.
В мутной воде, с большим количеством взвешенных частиц, гидроакустические системы не работают. Взвесь твердых частиц в воде, в том числе мелкие пузырьки воздуха, для гидроакустического сигнала представляет непреодолимую стену.
Класс пассивных магнитометрических систем основан на принципе обнаружения изменений магнитного поля земли. (Magnetic Anomaly Detection = MAD). Нарушитель, имеющий при себе ферромагнитные предметы, создает колебания магнитного поля, которые регистрируются чувствительным элементом, уложенным на дно водоема. Примером таких систем может служить «Мультигард-2000» израильской компании G-Max Security (http://www.g-max-security.com/Items/Item.aspx?Id=153), которая используется, в том числе, для защиты участков акваторий. К достоинствам данной системы можно отнести то, что она полностью скрыта и пассивна. Однако области применения всех магнитометрических систем ограничены небольшой зоной (глубиной) обнаружения (до 6 метров) и слабой защищенностью от индустриальных и природных электромагнитных помех. Также следует подчеркнуть, что нарушители, не имеющие при себе ферромагнитных предметов, не могут быть выявлены магнитометрическими системами.
Таким образом, магнитометрические системы имеют три существенных недостатка:
- они не могут контролировать участки акваторий с глубиной более 6 метров;
- на объектах, имеющих сильные электромагнитные помехи, количество ложных срабатываний столь велико, что эффективность их работы стремится к нулю;
- нарушители, не имеющие при себе ферромагнитных предметов, не могут быть обнаружены.
Активные электромагнитные системы, в отличие от пассивных магнитометрических систем, способны обнаруживать движущиеся объекты без ферромагнитных предметов, но на расстоянии не более 5 метров, что также ограничивает область их применения.
Системы физического барьера оснащены чувствительным элементом, размещенным по периметру охраняемой территории. Такие системы можно рассмотреть на примере трибоэлектрического (вибрационного) средства обнаружения Supersensor (Multisensor) израильской компании G-Max Security (http://www.g-max-security.com/Items/Item.aspx?Id=152&Cat=P).
Чувствительный элемент системы представляет собой экранированный кабель 2*22 AWG, состоящий из 2-х сплетенных между собой жил с покрытием алюминиевой фольгой и мягких ПВХ и дополнительной внешней изоляцией из устойчивого к ультрафиолету ПВХ. Для применения в водной среде используется сеть, особым образом сплетенная из чувствительного кабеля. Данная система может быть установлена на различных типах крепления или заграждения, при условии, что при этом перекрывается подводный участок периметра акватории. Система эффективно обнаруживает все попытки несанкционированного преодоления рубежа периметра: перелаз через ограждение, обрыв или подкоп.
Однако такие системы нельзя применять на участках акватории, имеющих течение, т.к. система с подвижным кабелем непрерывно находится в состоянии тревоги. Также при нарушении подводным пловцом целостности кабеля, сеть требует полной замены поврежденного участка.
Следовательно, данная система имеет два существенных недостатка:
- неработоспособна на участках акватории, имеющих сильное течение;
- при попытке проникновения с нарушением целостности чувствительного элемента требуется дорогостоящий ремонт с демонтажом системы и заменой участка сети. То есть система работает на обрыв и фактически является одноразовой. Такая же ситуация возникает при повреждении сети посторонними предметами, переносимыми течением (бревна, коряги и т.д.).
В последнее время обозначился повышенный интерес к вопросам создания радиолокационных систем, использующих сверхширокополосные сигналы, т.е. сигналы, полоса которых сопоставима с центральной частотой спектра. Также актуально создание подобных систем для зондирования земных недр, морских глубин и атмосферы (Вопросы перспективной радиолокации. - М.: Радиотехника, 2003 (Серия Радиолокация). - С.22-25). Объясняется это физической природой сверхширокополосных сигналов, порождающей ряд полезных свойств. Например, при отражении сверхширокополосные сигналы становятся носителями достаточно большого объема информации о самих зондируемых объектах (Борзов А.Б. Анализ вкладов отдельных элементов объекта сложной формы в общем поле рассеяния электромагнитных волн на объектах сложной формы. - Электромагнитные волны и электронные системы, 1998, №10, с.38-54). Сверхширокополосные сигналы практически нельзя подавить при прохождении сквозь среду с изменяющимися свойствами проницаемости.
Спектр зондирующего СШП сигнала содержит энергию, способную возбудить собственные резонансные частоты цели, определяемые ее геометрическими размерами, формой и материалом, из которого выполнена цель. Таким образом, в эхо-сигнале содержится информация, позволяющая распознавать различные объекты. В-третьих, значения собственных частот, характеризующих рассеивающий объект, в соответствии со способом сингулярных разложений, практически не зависят от ракурса цели, а поэтому они могут быть использованы в качестве информационных параметров для распознавания радиолокационных целей.
Наиболее близким по совокупности существенных признаков к предлагаемому техническому решению являются способ и система, описанные в международной заявке на изобретение WO/2008093088 «А SYSTEM FOR DETECTION OF UNDERWATER OBJECTS» (см. заявку WO/2008093088, МПК G08B 13/24, опубл. 0,7.08.2008), выбранные авторами в качестве прототипа. В известном техническом решении описана подводная система обнаружения подводных объектов, а также способ, в ней реализованный. Система включает, по меньшей мере, один передатчик для передачи по воде электромагнитного и/или магнитно-индукционного сигнала; по меньшей мере, один приемник; средства обработки сигнала, полученного от передатчика, и средства для использования обработанного сигнала в качестве образца, а также для идентификации любого изменения или изменений в полученном сигнале для заключения о присутствии объекта между передатчиком и приемником.
Недостатком прототипа является то, что принцип обнаружения системы построен на регистрации изменений магнитного поля, генерируемого передатчиком, поэтому она эффективна только для обнаружения нарушителей, имеющих при себе ферромагнитные предметы. Также система чувствительна к электромагнитным помехам индустриальных и природных источников. Большое количество датчиков, используемых в данной системе, указывает на то, что дальность обнаружения системы незначительна, вследствие чего защита водоемов с большой глубиной является проблемой для вышеуказанной системы.
Задачей предлагаемого изобретения является создание такого способа и системы обнаружения подводных объектов при их вторжении в охраняемую зону, которые бы позволили значительно повысить вероятность обнаружения подводных объектов, а также свести к минимуму вероятность ложных срабатываний за счет адаптации к конкретному водоему и возможности получения как можно большей информации об объекте.
Техническим результатом является значительное повышение эффективности обнаружения подводных объектов в охраняемой зоне.
Для достижения указанного технического результата предлагается в способе обнаружения подводных объектов, включающем передачу по воде электромагнитного сигнала, прием отраженного сигнала, обработку принятого сигнала с целью идентификации изменений в полученном сигнале и формирования сигнала тревоги в случае обнаружения подводного объекта в охраняемой зоне, в качестве электромагнитного сигнала использовать широкополосный электромагнитный сигнал с полосой частот от 10 МГц до 200 МГц, возбуждаемый в передающей антенне генератором наносекундной длительности. Предлагается также перед началом работы проводить эталонные измерения сигналов, отраженных от различных моделей нарушителей, получая «портрет цели» для каждого подводного объекта в условиях конкретного водоема, причем обработку принятого сигнала, используемого в дальнейшем для формирования тревоги, предлагается проводить путем сравнения его с полученными «портретами цели».
Дополнительными отличиями предлагаемого способа являются:
- длительность импульсов составляет от 1 наносекунды до 10 наносекунд;
- амплитуда импульсов находится в диапазоне от 1 кВ до 500 кВ в зависимости от планируемой дальности рубежа обнаружения системы;
- мощность каждого СШП импульса наносекундного генератора составляет от 1 МВт до 40 МВт в зависимости от частоты их следования (от 100 Гц до 100 кГц).
Также для достижения указанного технического результата предлагается в системе обнаружения подводных объектов, включающей, по меньшей мере, один передатчик с передающей антенной для передачи по воде электромагнитного сигнала, по меньшей мере, один приемник с принимающей антенной и средства обработки сигнала, в качестве передатчика использовать излучатель широкополосного сигнала с полосой частот от 10 МГц до 200 МГц, возбуждаемого в передающей антенне генератором наносекундной длительности.
Дополнительными отличиями предлагаемой системы являются:
- длительность импульсов излучателя составляет от 1 наносекунды до 10 наносекунд;
- амплитуда импульсов излучателя находится в диапазоне от 1 кВ до 500 кВ в зависимости от размера охраняемой зоны и конфигурации охранной системы;
- мощность каждого СШП импульса наносекундного генератора составляет от 1 МВт до 40 МВт в зависимости от частоты их следования (от 100 Гц до 100 кГц).
Сущность предлагаемого изобретения поясняется следующими чертежами.
На фиг.1 приведена блок-схема системы обнаружения подводных объектов.
На блок-схеме соответствующими цифрами обозначены следующие блоки:
1 - генератор наносекундных импульсов высокого напряжения,
2 - широкополосная излучающая антенна,
3 - широкополосная приемная антенна,
4 - усилитель сигнала,
5 - полосовой фильтр,
6 - стробоскопический приемник,
7 - аналого-цифровой преобразователь,
8 - блок классификации сигналов,
9 - блок эталонных сигналов,
10 - автоматизированное рабочее место оператора,
11 - блок передатчика,
12 - блок приемника.
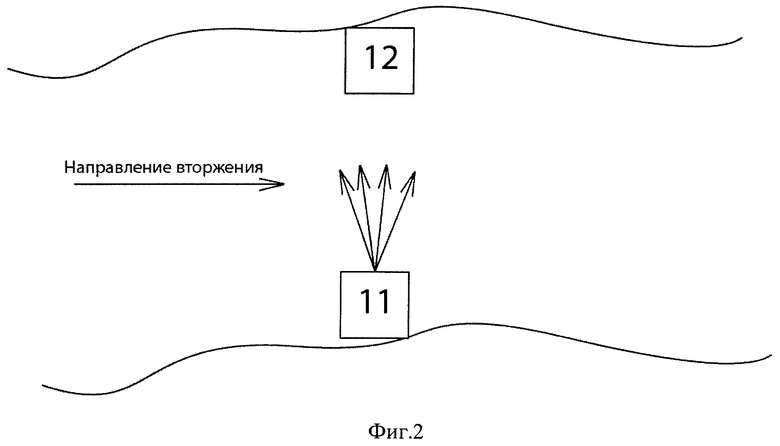
На фиг.2 приведен вариант размещения передатчика и приемника в охраняемой зоне, где передатчик расположен на одном берегу охраняемого участка акватории, а приемник на противоположном. При пересечении рубежа формируется сигнал тревоги. Система одноканальная.
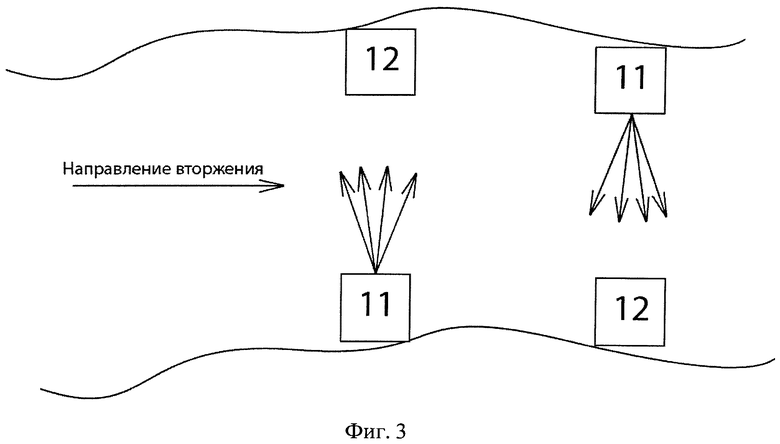
На фиг.3 приведен вариант размещения двух передатчиков и двух приемников в охраняемой зоне, где передатчик расположен на одном берегу охраняемого участка акватории, а приемник на противоположном. При пересечении рубежа сигнал тревоги формируется последовательно на логическом принципе А+В или В+А, где А и В разные каналы. Система двухканальная. При появлении сигнала на двух каналах одновременно сигнал тревоги не формируется, рассматривается как помеха.
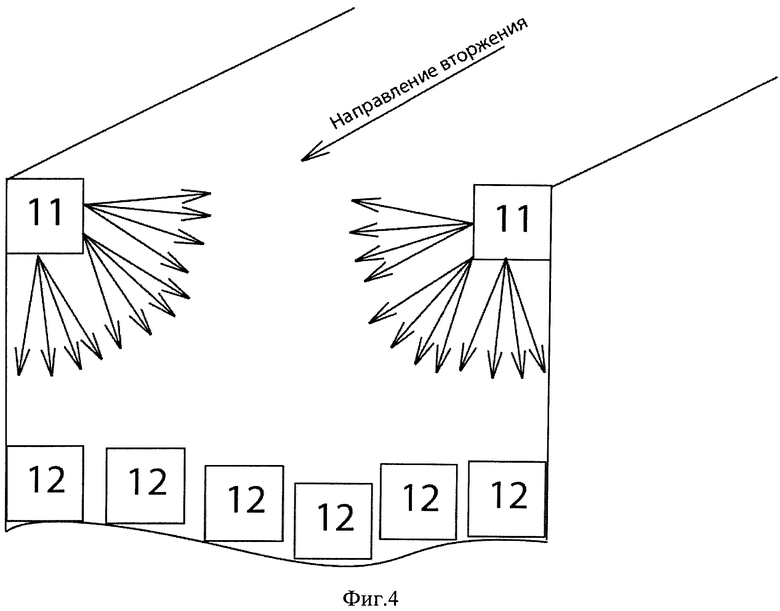
На фиг.4 приведен вариант размещения передатчиков и приемников в охраняемой зоне, где передатчики расположены у берегов охраняемого участка акватории, а приемники на дне водоема. При пересечении рубежа формируется сигнал тревоги. Система многоканальная. При нанесении участков расположения приемников на план водоема возможно точное определение места вторжения. Сигнал, одновременно поступивший на все каналы, рассматривается как помеха, в формировании сигнала тревоги не используется.
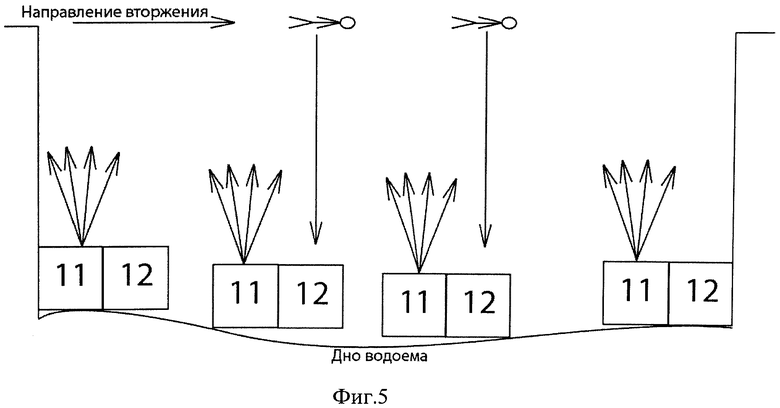
На фиг.5 приведен вариант размещения передатчиков и приемников в охраняемой зоне, где передатчики и приемники расположены на дне охраняемого участка акватории в виде протяженного рубежа. Приемник регистрирует сигнал, отраженный от нарушителя. При пересечении рубежа формируется сигнал тревоги. Система многоканальная. При нанесении участков расположения приемников на план водоема возможно точное определение места вторжения. Сигнал, одновременно поступивший на все каналы, рассматривается как помеха, в формировании сигнала тревоги не используется.
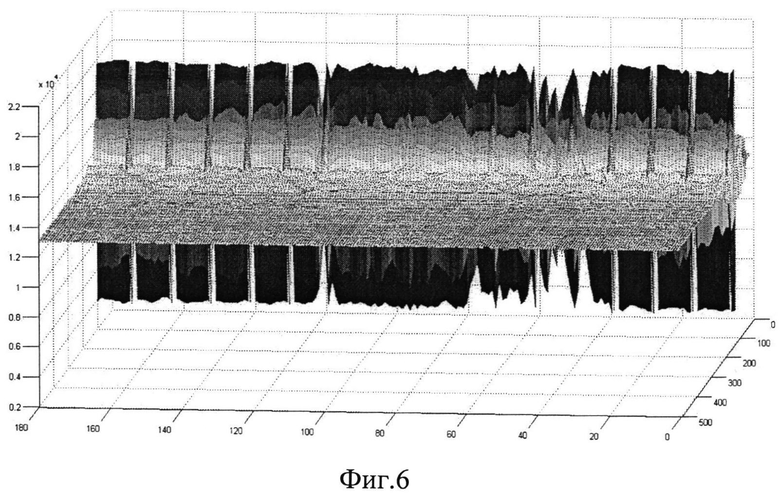
На фиг.6 приведена импульсно-частотная характеристика сигнала, полученного при отражении от подводного пловца без дыхательного аппарата и ферромагнитных предметов, где при значениях 120-180 сек - нет цели, при значениях 40-120 сек - цель пересекает охраняемую зону.
На данном графике (и на последующих графиках) по горизонтали отражена временная шкала, по вертикали - амплитуда импульсов.
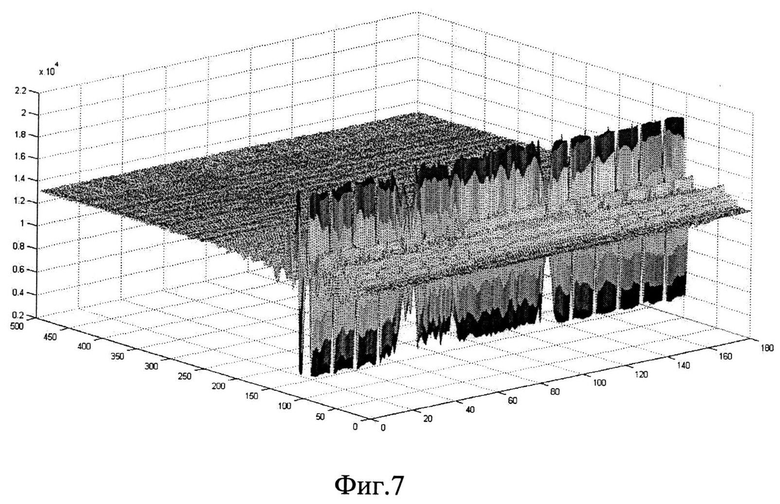
На фиг.7 приведена импульсно-частотная характеристика сигнала, полученного при отражении от подводного пловца с дыхательным аппаратом открытого цикла, где при значениях 120-180 сек - нет цели, при значениях 40-120 сек - цель пересекает охраняемую зону.
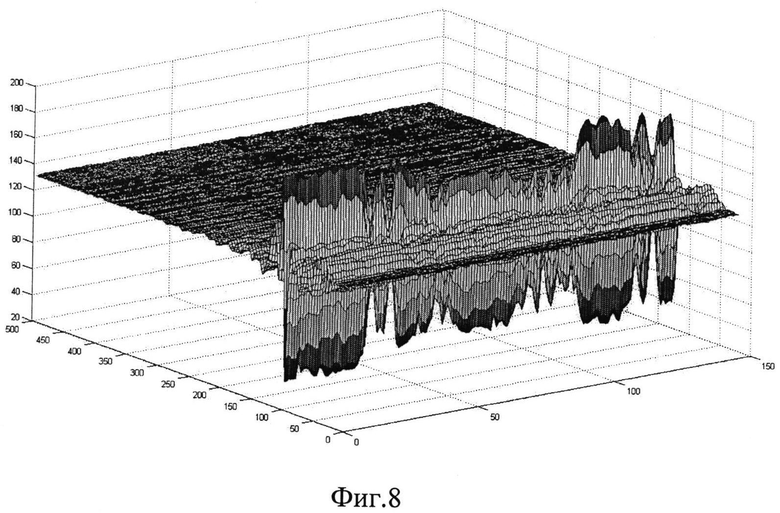
На фиг.8 приведена импульсно-частотная характеристика сигнала, полученного при отражении от движущегося крупного металлического предмета, где при значениях от 0 до 50 сек - нет цели, при значениях от 50 до 150 сек - цель пересекает охраняемую зону.
Предлагаемый способ реализуется путем регистрации и дальнейшей обработки сигналов, отраженных от подводной цели после облучения ее широкополосными импульсами. Для достижения заявленного результата в качестве излучателя применяется источник широкополосного излучения. Экспериментальным путем на полигоне установлено, что при излучении электромагнитного широкополосного сигнала в водной среде на регистрирующем приемнике наблюдается максимум амплитуды сигнала на частоте около 25 МГц.
На основании этого результата используется специальный излучатель широкополосного зондирующего сигнала с полосой от 10 МГц до 200 МГц. Излучатель состоит из генератора наносекундных импульсов высокого напряжения (от 1 кВ до 25 кВ) и широкополосной антенны, обеспечивающей передачу заявленного диапазона частот.
Электромагнитные волны зондирующего сигнала, распространяясь сквозь водную среду, испытывают поглощение и отражение. Два этих процесса зависят от большого количества параметров среды, поэтому при попадании постороннего подводного объекта на линию передатчик-приемник, или при отражении излучающего сигнала от исследуемого подводного объекта формируется рассеянное электромагнитное поле. При этом форма принимаемых импульсов существенно отличается от зондирующего импульса.
Также на форму отраженного импульса существенное влияние оказывают резонансные свойства той части поверхности цели, от которой отразился сигнал.
Резонансные свойства объекта, а также результат поглощения, рассеивания и отражения широкополосного сигнала от объекта, определяются импульсными особенностями исследуемой цели.
Их можно условно назвать «портретом цели», поскольку они несут в себе информацию не только о наличии цели, но и о ее геометрической форме, а также могут характеризовать такие свойства объекта, как плотность, геометрические размеры, наличие воздушных полостей внутри объекта, а также много других особенностей, присущих исследуемому объекту.
Например, от пловца с дыхательным аппаратом открытого цикла максимальная амплитуда сигнала наблюдается на частоте около 47 МГц.
В связи с тем, что для решения задач обнаружения подводных объектов при их вторжении в охраняемую зону можно использовать ограниченное число моделей нарушителей, способ и система обнаружения, основанные на описываемом принципе, могут быть адаптированы для нескольких основных моделей:
- маломерная подводная лодка;
- подводный пловец с дыхательным аппаратом открытого цикла;
- подводный пловец с дыхательным аппаратом замкнутого цикла;
- подводный пловец на средствах движения;
- подводный пловец без дыхательного аппарата и ферромагнитных предметов;
- любые другие объекты, сигналы от которых занесены в блок эталонных сигналов.
Каждой модели нарушителя будет соответствовать собственный «портрет цели», ее импульсно-частотная характеристика, примеры «портретов цели» приведены на фиг.6 - фиг.8.
При установке системы обнаружения на каждом конкретном объекте (водоеме) производится анализ сигналов от всех моделей нарушителей с записью полученных данный в память блока эталонных сигналов 9.
Полосовой фильтр 5 вырезает спектры сигналов шумов и сужает диапазон частот для дальнейшей обработки сигналов, что повышает помехоустойчивость системы. Стробоскопический приемник 6 предназначен для регистрации повторяющихся электрических сигналов и выделения сигнала для дальнейшей обработки.
В дальнейшем алгоритм работы системы строится на анализе сигналов (при помощи специализированного программного обеспечения) и сравнении их в блоке классификации 8 с сигналами «портретов целей», имеющимися в памяти блока эталонных сигналов 9.
Все другие сигналы, регистрируемые приемником, могут быть рассмотрены как помехи или шумы и для формирования сигнала тревоги не используются.
При данном способе обработки сигналов возможно выявлять не только нарушение охраняемого периметра акватории, но и производить идентификацию нарушителя в соответствии с его моделью.
Дополнительные возможности возникают при применении двухканальной конфигурации системы. Появляется возможность определить направление движения нарушителя при вторжении в охраняемую зону и логически отличить широкополосную электромагнитную помеху от сигнала нарушителя, т.к. нарушитель всегда последовательно пересекает каждый канал по очереди, а помеха поступает на оба канала одновременно (см. фиг.3).
Обработка сигналов цели для получения ее импульсно-частотных характеристик может производиться с применение преобразования Габона или преобразования Фурье (см. http://www.mivlgu.ru/conf/armand2012/pdf/S3_11.pdf, http://www.mivlgu.ru/conf/zvorykin2010/molodej/PDF/section28.pdf).
Предлагаемая система может быть выполнена из следующих компонентов:
1. Генератор с пикосекундным фронтом импульсов наносекундной длительности сигнала, например, FPM 10-N (http://www.fidtechnology.com/products/fpm-overview.html),
2. Передающая широкополосная антенна, например, рупорная микрополосковая (http://mwaves.ru/production/antenna-latitude/),
3. Приемная антенна, например, штыревая активная BCL 1-KA (http://www.duplexer.ru/BCL_1-KA.pdf),
4. Широкополосный усилитель, например, ZX60-6013 + (http://www.radioradar.net/news/electronics_news/zx60_6013.html),
5. Широкополосный полосовой фильтр, например, разработки ОАО "МНИИРС" (http://www.electronics.ru/files/article_pdf/0/article_298_501.pdf),
6. Цифровой стробоскопический приемник, например, TMR7112/TMR7120, TMR7140 (http://www.trimcom.ru/index.php?level=russian_nextchild_of_1177748792&time=1177749072),
7. Аналого-цифровой преобразователь, например, ADC12L080 (http://www.gaw.ru/html.cgi/txt/ic/National_Semi/adc/ADC12L080.htm),
8. 9. Блоки 8 и 9 реализованы на базе персонального компьютера и представляют собой аппаратно-программные средства для классификации сигналов на основании эталонных,
10. Автоматизированное рабочее место оператора построено на базе настольного компьютера. Отображает текущее состояние системы обнаружения с возможностью передачи сигнала тревоги на пульт охраны периметра высшего уровня.
Пример 1.
При исследовании спектра излучаемого через воду сигнала, поступающего на приемную антенну напрямую (без посторонних объектов на базисной линии передатчик приемник), основная спектральная частота принимаемого сигнала составляет 25 МГц. При пересечении линии передатчик-приемник, или при регистрации отраженного сигнала от объекта (пловец с аквалангом) основная спектральная частота изменяется до 47 МГц. Форма сигнала приведена на фиг.6-8.
Дальность обнаружения подводных объектов обусловлена мощностью излучателя, чувствительностью приемника и может составлять от единиц до нескольких десятков метров.
Пример 2.
Если техническим заданием обусловлена защита канала, пересекающего периметр охраняемого объекта, то передатчики и приемники устанавливаются на разных берегах данного гидротехнического сооружения. При пересечении линии передатчик-приемник формируется сигнал тревоги с указанием направления пересечения периметра (см. фиг.2, 3).
Если техническим заданием обусловлена защита участка акватории, на котором не представляется возможным установить передатчик и приемник на прямой линии, то на дно акватории устанавливаются приемно-передающие модули, соединенные подводным кабелем с блоком обработки (см. фиг.4, 5). При регистрации подводным модулем сигнала, отраженного от нарушителя, формируется сигнал тревоги. Длина охраняемого участка в такой конфигурации может составлять несколько километров.
Преимущества предлагаемого технического решения заключаются в следующем:
- возможность точно классифицировать нарушителя по спектру отраженного сигнала («портрет цели»);
- отсутствие опорной частоты в излучающем сигнале позволяет избавиться от реверберационных помех, что значительно повышает точность;
- могут быть выявлены нарушители, не имеющие ферромагнитных предметов;
- глубины, контролируемые активной широкополосной системой, существенно выше, чем в применяемых в настоящий момент системах;
- адаптация системы к каждому конкретному участку охраняемой акватории позволяет свести к минимуму вероятность ложных срабатываний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях | 2019 |
|
RU2715158C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ | 2016 |
|
RU2626460C1 |
| СПОСОБ ОХРАНЫ ВОДНЫХ РУБЕЖЕЙ | 2008 |
|
RU2364883C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШЕНИЯ РУБЕЖА ОХРАНЫ | 2013 |
|
RU2573259C2 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ПОДВОДНОЙ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКОЙ | 2006 |
|
RU2309872C1 |
| РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2005 |
|
RU2292600C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 2010 |
|
RU2455692C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2468441C2 |
| ДОННОЕ МОРСКОЕ СТОРОЖЕВОЕ УСТРОЙСТВО | 2006 |
|
RU2317514C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2563140C1 |
Предлагаемое изобретение относится к технике обнаружения цели под водой, а именно к устройствам активной физической защиты периметров объектов и может быть использовано для охраны периметров подводной части акваторий от несанкционированного проникновения на охраняемый объект движущихся подводных объектов. Предлагается способ обнаружения подводных объектов, включающий передачу по воде электромагнитного сигнала, прием отраженного сигнала, обработку принятого сигнала с целью идентификации изменений в полученном сигнале и формирования сигнала тревоги в случае обнаружения подводного объекта в охраняемой зоне, в качестве электромагнитного сигнала используется широкополосный электромагнитный сигнал с полосой частот от 10 МГц до 200 МГц, возбуждаемый в передающей антенне генератором наносекундной длительности. Технический результат заключается в повышении эффективности обнаружения подводных объектов в охраняемой зоне. 3 з.п. ф-лы, 8 ил.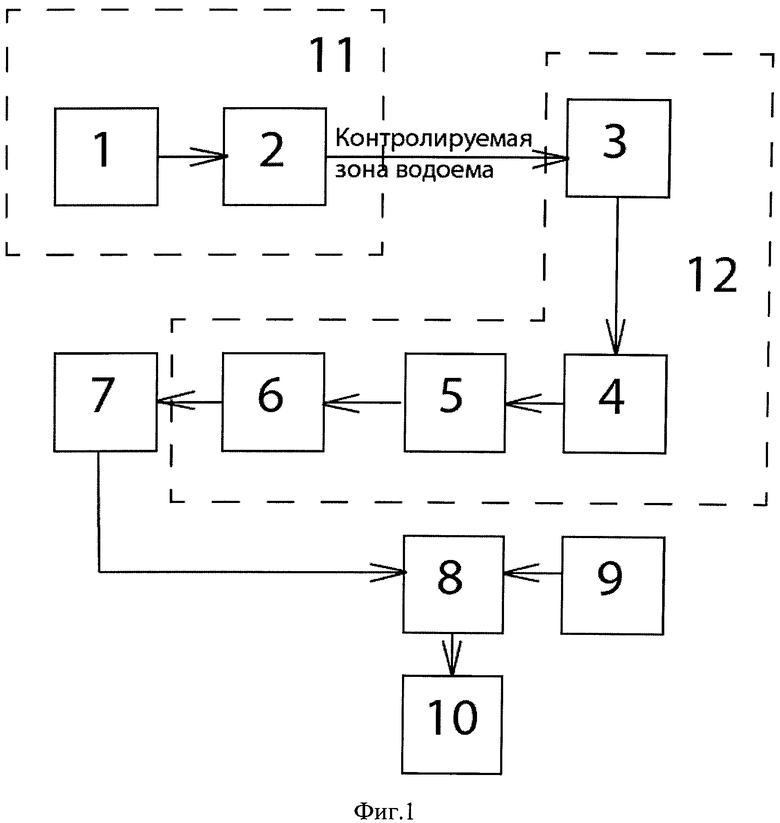
1. Способ обнаружения подводных объектов, включающий передачу по воде электромагнитного сигнала, прием отраженного сигнала, обработку принятого сигнала с целью идентификации изменений в полученном сигнале и формирования сигнала тревоги в случае обнаружения подводного объекта в охраняемой зоне, отличающийся тем, что в качестве электромагнитного сигнала используют широкополосный электромагнитный сигнал с полосой частот от 10 МГц до 200 МГц, возбуждаемый в передающей антенне генератором наносекундной длительности, при этом амплитуда импульсов находится в диапазоне от 1 кВ до 500 кВ в зависимости от размеров охраняемой зоны и конфигурации охранной системы, тогда как мощность каждого импульса наносекундного генератора составляет от 1 МВт до 40 МВт в зависимости от частоты их следования от 100 Гц до 100 кГц, перед началом работы проводят эталонные измерения сигналов, отраженных от различных моделей нарушителей, получая «портрет цели» для каждого подводного объекта в условиях конкретного водоема, причем обработку принятого сигнала, используемого в дальнейшем для формирования тревоги, проводят путем сравнения его с полученными «портретами цели».
2. Способ по п. 1, отличающийся тем, что длительность импульсов составляет от 1 наносекунды до 10 наносекунд.
3. Система обнаружения подводных объектов, включающая, по меньшей мере, один передатчик для передачи по воде электромагнитного сигнала, по меньшей мере, один приемник и средства обработки сигнала, отличающаяся тем, что в качестве передатчика использован излучатель широкополосного сигнала с полосой частот от 10 МГц до 200 МГц, возбуждаемого в передающей антенне генератором наносекундной длительности, при этом амплитуда импульсов излучателя находится в диапазоне от 1 кВ до 500 кВ в зависимости от размеров охраняемой зоны и конфигурации охранной системы, тогда как мощность каждого импульса наносекундного генератора составляет от 1 МВт до 40 МВт в зависимости от частоты их следования от 100 Гц до 100 кГц.
4. Система по п. 3, отличающаяся тем, что длительность импульсов излучателя составляет от 1 наносекунды до 10 наносекунд.
| WO 2008093088 A2, 07.08.2008 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ЛЮДЕЙ И ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384860C2 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ОБЪЕКТОВ ПРИ ВСПЛЫТИИ ПОДВОДНОГО АППАРАТА | 2005 |
|
RU2308052C1 |
| СПОСОБ НАНОСЕКУНДНОЙ РАДИОЛОКАЦИИ С РЕЗОНАНСНОЙ КОМПРЕССИЕЙ ИМПУЛЬСА ПЕРЕДАТЧИКА | 2007 |
|
RU2356065C2 |

