Изобретение относится к области радиолокационного обнаружения, а именно к способам обнаружения несанкционированного проникновения в контролируемую зону, и может быть использовано для охраны важных стратегических объектов, водозаборов, хранилищ взрывчатых и химических веществ и других объектов, обеспечивая обнаружение нарушителя на всей площади объекта, на подходах к нему по земле, воде и с воздушного пространства.
Известен способ обнаружения вторжения в контролируемую зону, реализованный, например, см. систему "ПИОН-1", Охрана периметров И.В.Иванов.- М.: Радио и связь, 1997, с. 14; Аппаратура "ПИОН-Т", техническое описание и инструкция по эксплуатации АВЯ1.400.005 ТО.
Способ осуществляют с помощью радиолокационных датчиков с узкими диаграммами направленности, установленными вдоль периметра и реагирующими на пересечение радиолокационного луча нарушителем.
Недостатками этого способа являются невозможность обнаружения проникновения нарушителя по воздуху и нечувствительность к нарушителю, находящемуся внутри контролируемой территории.
Известен радиолокационный доплеровский обнаружитель, позволяющий контролировать вторжение движущегося нарушителя в заданный объем или площадь, независимо от способа проникновения, используемый в устройствах охранной сигнализации, например: патент России N 2033626, G 01 S 13/02, 1992.
Это устройство, реализующее известный способ обнаружения, содержит радиолокационные датчики с широкой диаграммой направленности, охватывающей определенный объем (площадь) охраняемой зоны, и не позволяет определять координаты местонахождения нарушителя, что ограничивает его применение только в закрытых помещениях или на открытых площадках небольших размеров, огороженных зазором, при этом крупноразмерная цель, находящаяся за пределами охраняемой зоны, может привести к ложному срабатыванию устройства.
Известен способ обнаружения вторжения движущегося объекта в контролируемую зону, реализованный в, см. патент США N 5132690, G 01 S 13/00, 1992. В этом способе осуществляют зондирование заданной зоны обнаружения узким сканирующим лучом с помощью фазированной антенной решетки (ФАР), прием и обнаружение эхо-сигналов от цели осуществляют удаленным на некоторое расстояние от передатчика приемным устройством радиолокационной станции (РЛС).
Однако для реализации данного способа требуется сложная дорогостоящая энергоемкая антенная система, при произвольной конфигурации охраняемой зоны потребуется увеличение числа РЛС, что приведет к значительному усложнению и удорожанию аппаратуры, ограничению ресурса работы.
Известно устройство для обнаружения вторжения нарушителей в охраняемую зону (см. патент GB N 2120491, G 01 S 13/56, оп. 30.11.83), которое позволяет осуществить радиолокационное наблюдение и обнаружение движущегося объекта с использованием радиолокационных датчиков с широкими диаграммами направленности с перекрытием секторов их обзора. Однако данное устройство не решает задачу измерения дальности до цели и определение ее точного местонахождения в пределах области наблюдения.
Целью и техническим результатом данного изобретения является обнаружение движущегося объекта в контролируемой зоне, на подходах к ней по земле и воздуху, без использования сложных антенных устройств, при этом контролируемая зона может иметь произвольную конфигурацию.
Поставленная цель достигается тем, что в способе обнаружения вторжения движущихся объектов в контролируемой зоне, заключающемся в радиолокационном наблюдении и автоматическом обнаружении движущегося объекта в пределах контролируемой зоны, радиолокационное наблюдение осуществляют радиолокационными датчиками, имеющими широкие диаграммы направленности и установленными с перекрытием секторов их обзора, осуществляют многоканальный прием по дальности отраженных сигналов и обнаружение движущегося объекта в пределах разрешения одного канала дальности одновременно несколькими радиолокационными датчиками, определяют координаты движущегося объекта по координатам места пересечения эквидальности зон каналов дальности, в которых произошло обнаружение движущегося объекта, сравнивают полученные координаты с областью координат контролируемой зоны и по результатам сравнения судят о вторжении движущегося объекта в контролируемую зону. Многоканальный по дальности прием отраженных сигналов заключается в том, что дистанция по дальности действия каждого датчика разбивается на зоны, соответствующие отдельному каналу дальности, обнаружение сигнала производят в каждой зоне дальности раздельно.
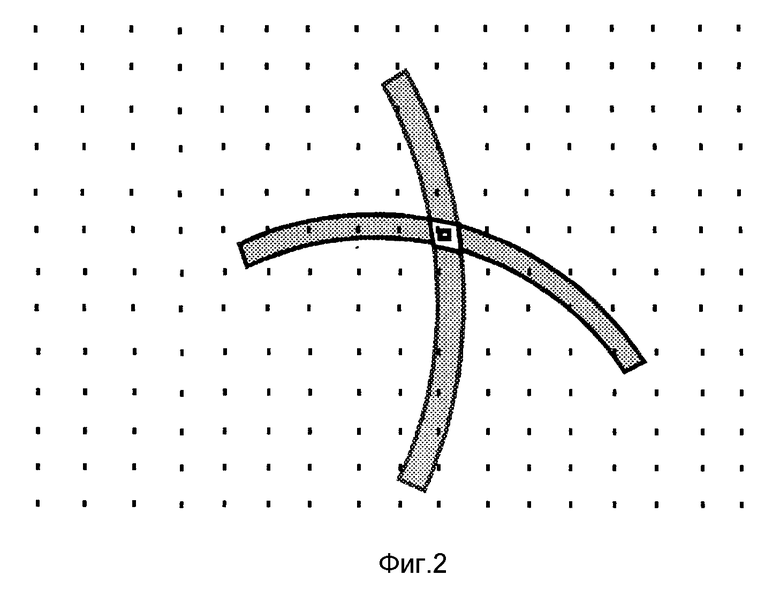
На фиг. 1 изображена схема определения местоположения движущегося объекта (нарушителя) согласно заявляемому способу с использованием двух ортогонально-ориентированных датчиков.
где:
1 - первый и второй радиолокационные датчики;
2 - нарушитель;
3 - охраняемый объект;
4 - площадь пересечения зон дальности (n-й первой датчика и m-й для второго датчика, в которой произошло обнаружение нарушителя).
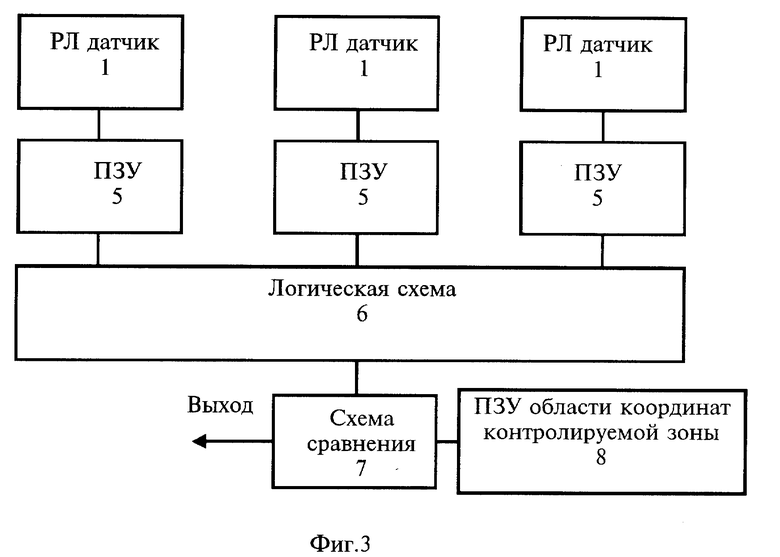
На фиг. 2 изображено взаимное расположение сетки координат и зон дальности датчиков, в которых произошло обнаружение.
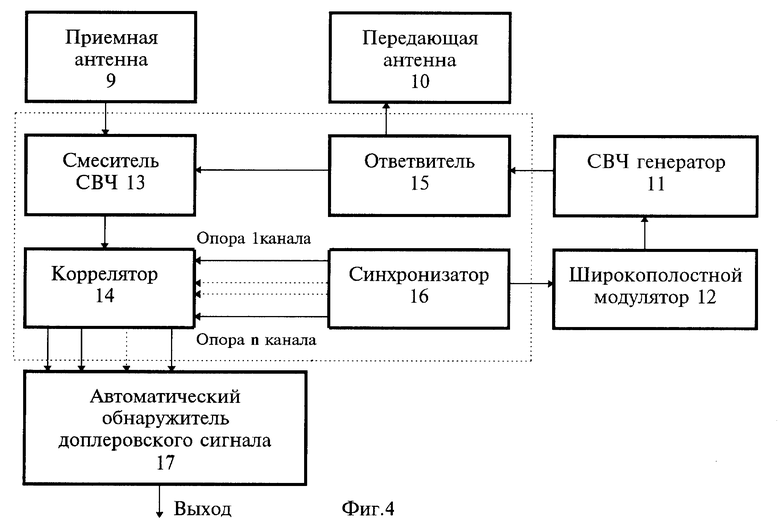
На фиг. 3 представлена структурная схема устройства, реализующего заявляемый способ (для 3-х радиолокационных датчиков).
На фиг. 4 - пример выполнения радиолокационного датчика.
Для реализации заявляемого способа устанавливают радиолокационные датчики в соответствии с конфигурацией охраняемой территории, обеспечивая перекрытие секторов обзора.
Местоположение нарушителя может быть определено, например, с использованием устройства, представленного на фиг. 3, где:
1 - радиолокационные датчики;
5 - постоянное запоминающее устройство (ПЗУ);
6 - логическая схема, исключающая ИЛИ;
7 - схема сравнения;
8 - ПЗУ области координат контролируемой зоны (карты местности).
Радиолокационный датчик (см. фиг. 4) представляет собой доплеровский СВЧ-радиолокатор ближней дальности действия с непрерывным излучением, включающий две антенны: приемную 9 и передающую 10, СВЧ-генератор 11 с широкополосным модулятором 12, многоканальный корреляционный приемник гомодинного типа, включающий смеситель СВЧ 13, коррелятор 14, ответвитель 15, синхронизатор 16 и автоматический обнаружитель доплеровского сигнала 17.
Зондирование и прием отраженных сигналов производятся во всем угловом секторе обзора, обусловленном шириной диаграмм направленности антенн, составляющих величину (60...120o). Широкополосный выходной сигнал СВЧ-генератора 11 подается на вход ответвителя 15, с выхода которого сигнал без ослабления поступает на вход передающей антенны 10 и ослабленный до требуемого уровня поступает на гетеродинный вход смесителя СВЧ 13, сигнальный вход которого соединен с выходом приемной антенны 9. С выхода смесителя 13 сигнал поступает на вход многоканального коррелятора 14, где производится вычисление взаимокорреляционной функции принятого сигнала с опорными сигналами каждого канала дальности, формируемыми синхронизаторами 16. Автоматический обнаружитель 17 выделяет присутствующий в каком-либо из каналов дальности доплеровский сигнал. Выходом датчика является выход обнаружителя, сигнал которого представляет собой цифровой код дальности обнаруженной цели.
В момент обнаружения нарушителя на выходе датчика 1 (см. фиг. 3) появляется цифровой код соответствующей зоны дальности.
Сформированный код поступает на адресный вход ПЗУ 5. ПЗУ 5 запрограммировано таким образом, что при подаче на адресный вход кода зоны дальности на шине данных (на входе) появляется массив координат, принадлежащих этой зоне дальности в физическом пространстве. Шаг сетки координат выбирается таким, чтобы в элемент, образованный пересечением зон дальности разных датчиков, попала по крайней мере одна точка сетки координат (см. фиг. 2).
Выходы ПЗУ 5 (шина данных) соединены со входами логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 6. На выходе логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ появляется массив данных, соответствующий элементу пространства, где пересекаются зоны дальности датчиков, в которых произошло обнаружение цели.
Далее в схеме сравнения 7 производится сравнение координат местоположения нарушителя с областью координат контролируемой зоны (карты местности), запрограммированными в ПЗУ 8, и принимается решение о вторжении нарушителя в контролируемую зону.
Применение заявляемого способа позволит:
- формировать рубежи охраны произвольной конфигурации без проведения инженерных работ по устройству этих рубежей на территории охраняемого объекта;
- обнаруживать движущегося нарушителя на всей площади контролируемой территории, имеющей сложную конфигурацию, на подходах к ней по земле и воздуху, без дорогостоящих сканирующих РЛС, при этом исключить ложные тревоги от подвижных объектов, находящихся за контролируемой территорией.
Несмотря на широкие диаграммы направленности антенн предлагаемый способ позволяет точно определить местоположение нарушителя. Погрешность определения местоположения зависит от ширины зон, на которые разбита шкала дальности датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХРАНЫ ОБЪЕКТОВ ОТ ПРОНИКНОВЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ МАЛОРАЗМЕРНЫХ МАЛОВЫСОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ТИПА БПЛА) | 2019 |
|
RU2744497C2 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| СПОСОБ НАВЕДЕНИЯ ОПТИЧЕСКОГО ПРИБОРА НА ОБНАРУЖЕННЫЙ ОБЪЕКТ | 2001 |
|
RU2242770C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ОХРАНЫ | 2022 |
|
RU2793202C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов | 2019 |
|
RU2720552C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ОХРАНЫ | 2010 |
|
RU2427039C1 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| МАТРИЧНАЯ РЛС ОХРАНЫ ПЛОЩАДИ | 2019 |
|
RU2718954C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
Изобретение относится к области радиолокационного обнаружения местоположения нарушителя на всей площади контролируемой территории, на подходах к ней по земле, воде и с воздушного пространства и может быть использовано для охраны важных стратегических объектов, водозаборов, хранилищ и др. объектов. В соответствии с заявленным способом производят радиолокационное наблюдение и автоматическое обнаружение перемещающихся объектов в пределах контролируемой зоны с помощью радиолокационных датчиков с широкими диаграммами направленности и установленных в зависимости от конфигурации контролируемой зоны в местах, обеспечивающих перекрытие секторов и обзора, обнаружение движущихся объектов осуществляют в пределах разрешения одного канала дальности одновременно несколькими радиолокационными датчиками из различных точек, местоположение объекта определяют по координатам области пересечения эквидальностных зон каналов дальности радиолокационных датчиков, в которых произошло обнаружение сигнала от движущегося объекта, а окончательное решение о вторжении нарушителя в контролируемую зону принимают в случае попадания координат местонахождения нарушителя в область контролируемой зоны, что и является достигаемым техническим результатом. 4 ил.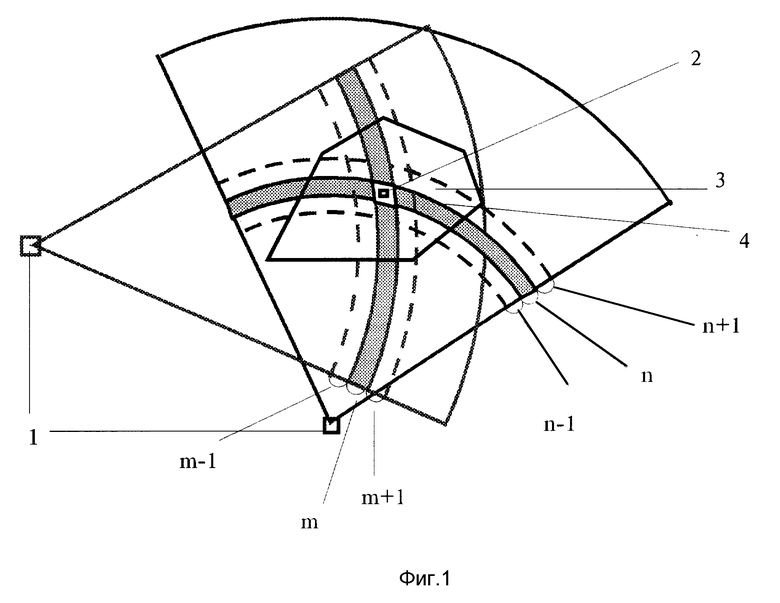
Способ обнаружения вторжения движущегося объекта в контролируемую зону, заключающийся в радиолокационном наблюдении несколькими датчиками с широкими диаграммами направленности, установленными с перекрытием секторов их обзора, отличающийся тем, что проводят многоканальный по дальности прием отраженных сигналов, обнаружение движущегося объекта осуществляют в пределах разрешения одного канала дальности одновременно несколькими датчиками, определяют местонахождение движущегося объекта по координатам места пересечения эквидальностных зон, соответствующих каналам дальности, в которых произошло обнаружение движущегося объекта, сравнивают полученные координаты с областью координат контролируемой зоны и по результатам сравнения принимают решение о вторжении движущегося объекта в контролируемую зону.
| ИЗНОСОСТОЙКИЙ СПЛАВ | 1997 |
|
RU2120491C1 |
| DE 3600827 A1, 16.07.87 | |||
| DE 3313358 A1, 01.12.83 | |||
| US 4359732 A, 16.11.82 | |||
| US 4656476 A, 07.04.87 | |||
| ДОПЛЕРОВСКИЙ ОБНАРУЖИТЕЛЬ | 1992 |
|
RU2033626C1 |
| Справочник по радиоэлектронным системам / Под ред | |||
| Б.Х.Кривицкого | |||
| - М.: Энергия, 1979, т.2, с.83, 84, 135. | |||

