Настоящее изобретение относится к способу управлению приводами для мебели согласно ограничительной части пункта 1 формулы изобретения, а также к управляющему устройству, предназначенному для управления приводами для мебели, в соответствии с ограничительной частью пункта 17.
Приводы для мебели и способы управления данными приводами известны из уровня техники. Такие приводы используют, например, в электромеханических системах открывания выдвижных ящиков, которые, как правило, размещают позади каждого выдвижного ящика таким образом, что привод, например рычаг, приводимый в движение двигателем, по соответствующему запускающему сигналу на заданную величину выталкивает выдвижной ящик из корпуса мебели.
Проблема заключается в том, что иногда электронная система управления ошибочно распознает запускающий сигнал и активирует привод, управляемый указанной электронной системой, несмотря на то, что запуск системы открывания выдвижного ящика не предполагался. Подобное непреднамеренное срабатывание системы может быть вызвано, например, тем, что запускающий сигнал обусловлен вибрациями корпуса мебели в результате воздействия на него внешних сил или приведения в движение другого выдвижного ящика, установленного в корпусе мебели.
До сих пор указанную проблему решали за счет того, что закрепляли электронный блок, передающий запускающий сигнал в электронную систему управления, на задней стенке корпуса мебели с максимально возможной жесткостью и виброустойчивостью. Однако данное решение является невыгодным, поскольку реализация виброустойчивого крепления приводит к увеличению расходов на конструирование и, тем самым, к повышению себестоимости изделия.
Еще одно решение заключается в том, что при функционировании одного из нескольких приводов происходит блокирование остальных приводов.
Задача настоящего изобретения состоит в том, чтобы предложить способ управления приводами для мебели, при котором исключена возможность непреднамеренного или случайного запуска привода.
Еще одна задача изобретения заключатся в том, чтобы предложить управляющее устройство, предназначенное для управления приводами для мебели, которое исключает возможность непреднамеренного или случайного запуска приводов для мебели.
Указанные задачи решены благодаря созданию способа управления приводами для мебели согласно отличительной части пункта 1 формулы изобретения и управляющего устройства, предназначенного для управления приводами для мебели, в соответствии с отличительной частью пункта 17.
В соответствии с предлагаемым способом благодаря заданию временного интервала и порогового значения чувствительности, определяемого в пределах указанного временного интервала, запуск процесса выталкивания становится зависимым от различных параметров. В результате, непреднамеренный запуск привода для мебели эффективно предотвращают.
Дополнительные предпочтительные варианты изобретения являются предметом зависимых пунктов формулы изобретения.
Благодаря тому, что несколько электронных блоков управления соединены друг с другом через шину данных, обеспечено то, что функционирование одного или нескольких приводов оказывает влияние на пороговое значение чувствительности, необходимое для осуществления запуска другого привода.
Возможность подключения к шине данных дополнительных электронных блоков позволяет подсоединять, например, датчики температуры, влажности или вибраций. Причем данные, полученные от этих электронных блоков, влияют на пороговое значение чувствительности.
Преимущество указанного решения заключается в том, что блоки, подключенные к шине данных, также могут обмениваться различными другими данными, например, по управлению одновременным запуском двух или более приводов. Кроме того, обеспечена возможность подключения дополнительных устройств, например, дополнительных измерительных устройств (без привода). Более того, посредством дополнительных датчиков в линии данных могут поступать данные об условиях окружающей среды (о температуре, влажности, землетрясении). В результате, подключенные к шине приводы имеют возможность активно регулировать свои действия.
И наоборот, можно также обеспечить вывод сигналов таким образом, чтобы все поступающие в шину данные были переданы в другие системы.
По существу, возможно использование традиционной шины данных. Однако ее использование влечет недостаток, который заключается в том, что при последовательной передаче данных всегда присутствует незначительное запаздывание во времени. В предпочтительном варианте при передаче данных через шину указанное запаздывание по времени исключено за счет использования принципа разрешения конфликтных ситуаций. Блоки управления с одинаковым адресом всегда работают одновременно как источники и приемники данных. Все указанные блоки управления в течение одного и того же временного интервала сообщают данные о состоянии и одновременно с этим считывают данные о состоянии. Когда один блок управления устанавливает состояние, все остальные устройства оценивают данное состояние и реагируют соответствующим образом с синхронизацией по времени.
Далее представлено подробное описание предпочтительных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых изображено следующее.
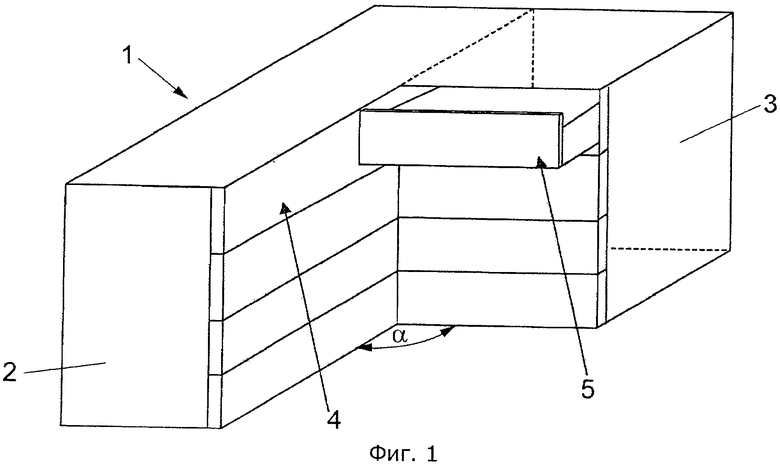
На фиг.1 в аксонометрии схематично показан предмет мебели с выдвижными ящиками в качестве подвижных элементов мебели.
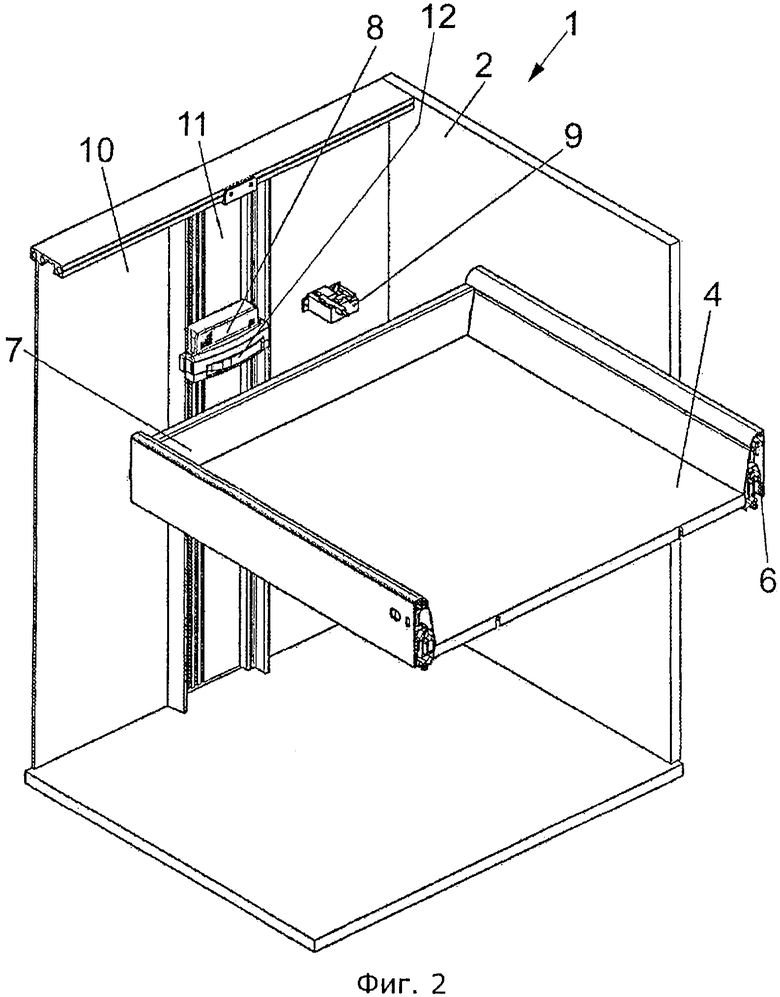
На фиг.2 в аксонометрии детально изображен предмет мебели в частично разобранном виде, содержащий привод и элемент мебели, приводимый в движение указанным приводом.
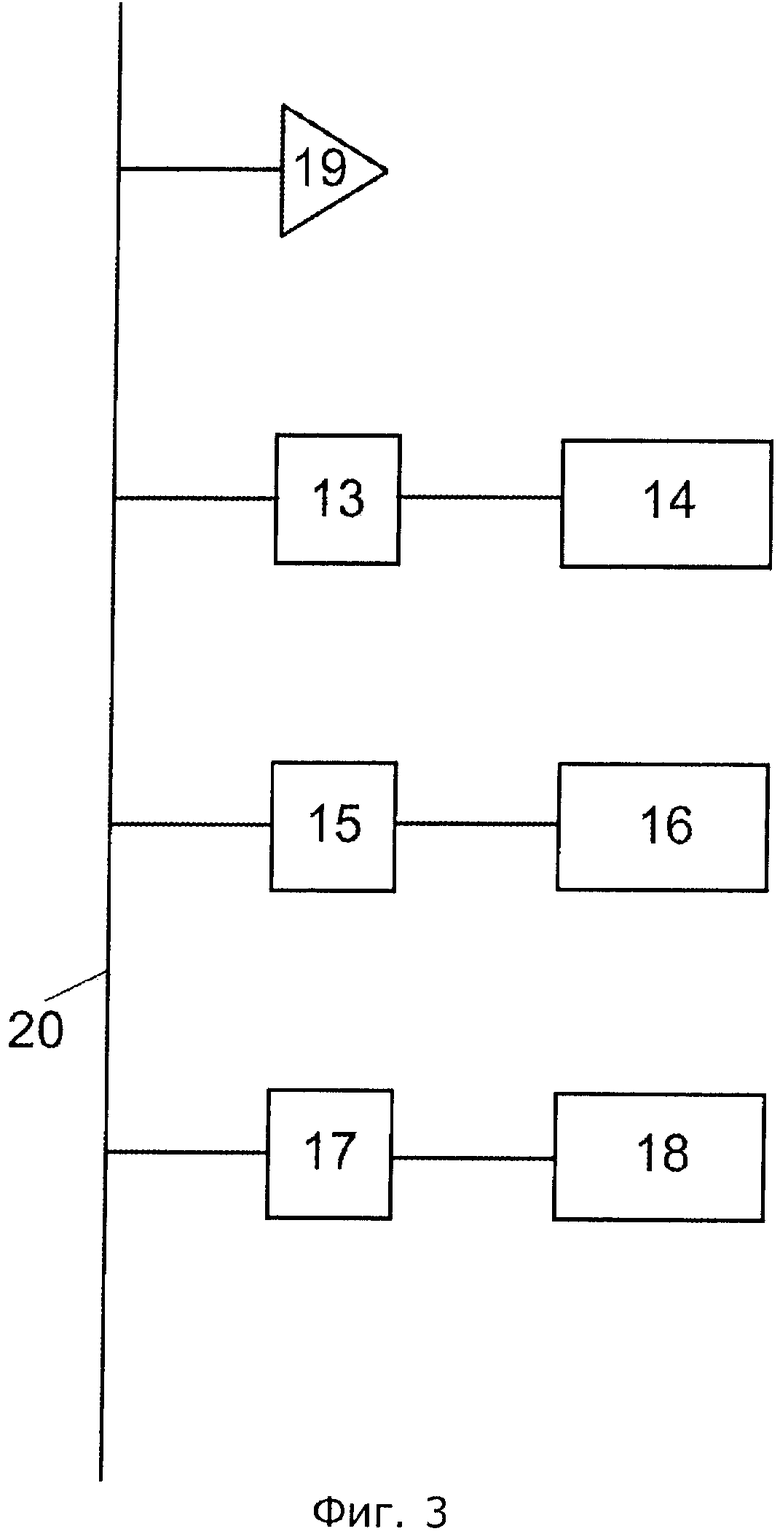
На фиг.3 схематично изображено несколько приводов для мебели, соединенных друг с другом через шину.
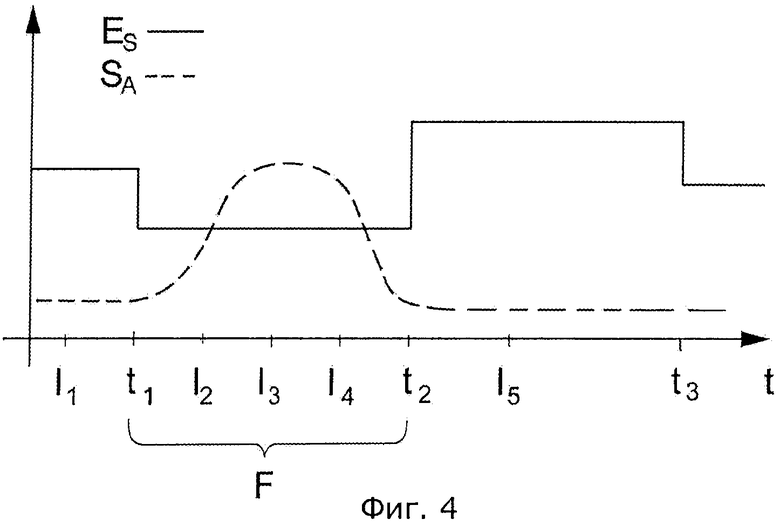
На фиг.4 представлен график, на котором изображен временной интервал с данными о состоянии, предназначенными для определения порогового значения чувствительности.
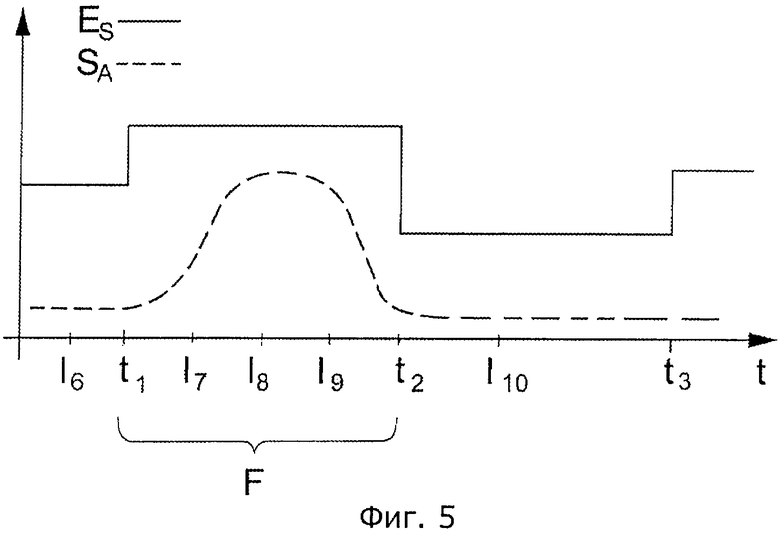
На фиг.5 представлен график, на котором изображен временной интервал с данными о состоянии, предназначенными для определения порогового значения чувствительности.
Предлагаемый способ управления реализован, например, в предмете мебели, изображенном на фиг.1. Данный предмет мебели содержит два корпуса 2, 3, которые расположены под углом α друг к другу и вмещает в себя подвижные элементы 4, 5 мебели, выполненные в данном случае в виде выдвижных ящиков. Угол α представляет собой угол между лицевыми сторонами двух корпусов 2 и 3. Причем в данных корпусах можно установить ящики с возможностью выдвижения, или - крышки с возможностью откидывания, или - дверцы с возможностью поворота из передней плоскости. Кроме того, на лицевых сторонах корпусов 2, 3 мебели также можно устанавливать выдвижные ящики, крышки и дверцы в различных их комбинациях.
На фиг.2 показан предмет 1 мебели в частично разобранном виде с установленным в нем подвижным элементом мебели. В корпусе 2 коробчатого типа выдвижной ящик 4 закреплен с возможностью перемещения. Для этого по бокам выдвижного ящика 4 предусмотрены направляющие 6, прикрепленные к соответствующим стенкам корпуса 2 мебели.
Рядом с задней стенкой 7 выдвижного ящика 4 расположен привод 8 с выталкивателем 12 и электронным блоком управления, предназначенным для управления приводом 8. Выталкиватель 12 предпочтительно выполнен в виде выталкивающего рычага или толкателя и предпочтительно приводится в движение электродвигателем, размещенным в приводе 8. Привод 8 закреплен на вертикальной планке 11, по которой проведены электрические провода, обеспечивающие подачу электроэнергии, (не показаны) и линия шины данных (не показана).
Посредством привода 8, после передачи в электронный блок управления сигнала выталкивания выталкиватель 12 в нормальном режиме функционирования по меньшей мере частично выталкивает из корпуса 2 элемент 4 мебели, закрепленный в корпусе 2 мебели с возможностью перемещения. Причем по завершении процесса выталкивания выталкиватель12 снова возвращается в свое исходное положение.
Сигнал выталкивания подает датчик 9. Датчик 9 предпочтительно представляет собой датчик положения, например, емкостный датчик или бесконтактный датчик, а именно инфракрасный датчик, ультразвуковой датчик или радиодатчик.
Датчик 9 реагирует на изменение положения подвижного элемента 4 мебели, подавая сигнал SA выталкивания, который, как правило, обусловлен тем, что пользователь нажимает на переднюю стенку подвижного элемента 4 мебели или тянет за нее. Датчик 9 предпочтительно пригоден для регулирования силы или величины сигнала SA выталкивания в зависимости от степени изменения положения.
Однако изменение положения подвижного элемента 4, 5 мебели относительно датчика 9 положения также может быть вызвано вибрациями подвижного элемента 4, 5 или самого датчика 9.
Предлагаемый способ предназначен для того, чтобы исключить возможность подобного непреднамеренного процесса выталкивания подвижных элементов мебели. Указанный способ описан далее со ссылкой на фиг.3-5.
В соответствии с предлагаемым в настоящем изобретении способом успешная активация процесса выталкивания, осуществляемого приводом 14, зависит от того, превысит ли сигнал SA выталкивания пороговое значение чувствительности ES, определяемое на одном из этапов предлагаемого способа. Согласно изобретению определение порогового значения чувствительности ES происходит в пределах временного интервала F, задаваемого генератором тактовых импульсов. Для того чтобы определить пороговое значение ES чувствительности, электронный блок 13, 15, 17 управления запрашивает и обрабатывает данные I2, I3, I4 о состоянии соответствующего привода 14, 16, 18. Если в предметах 1 мебели предусмотрено несколько приводов 14, 16, 18, то электронные блоки 13, 15, 17 управления приводами 14, 16, 18 предпочтительно объединяют в сеть посредством шины 20 данных. В этом случае для определения порогового значения ES чувствительности используют данные I2, I3, I4 о состоянии, отражающие текущее состояние всех приводов 14, 16, 18.
В частности, к шине 20 данных предпочтительно подключают по меньшей мере один дополнительный электронный блок 19, обеспечивающий дополнительные данные о состоянии, которые также учитываются при определении порогового значения ES чувствительности.
В пределах временного интервала F сначала считываются данные всех подключенных электронных блоков 13, 15, 17, 19 и отправляются собственные данные на все остальные электронные блоки. В оставшееся время в пределах временного интервала F происходит вычисление порогового значения ES чувствительности на основании всех имеющихся данных I2, I3, I4, полученных в пределах временного интервала F.
Данные о состоянии приводов 14, 16, 18 представляют собой, например, данные о готовности к работе привода 14, 16, 18, сообщение об ошибке, данные о том, находится или нет привод 14, 16, 18 в зацеплении с подвижным элементом 4, 5 мебели, или о том, осуществляет ли один из приводов 14, 16, 18 процесс выталкивания в текущий момент. Данные о состоянии, предоставляемые дополнительным электронным блоком 19, представляют собой, например, сообщение о вибрации подвижного элемента 4, 5 мебели или данные о температуре или влажности окружающей среды.
В зависимости от того, какие данные о состоянии пересекаются друг с другом в пределах временного интервала F, электронный блок 13, 15, 17 управления, который управляет процессом выталкивания, осуществляемым приводом 14, 16, 18, рассчитывает соответственно высокое или низкое пороговое значение ES чувствительности. Если значение сигнала SA выталкивания превышает указанное пороговое значение ES чувствительности, то привод 14, 16, 18 осуществляет процесс выталкивания. Если же значение сигнала SA выталкивания меньше порогового значения ES чувствительности, то привод 14, 16, 18 процесс выталкивания не выполняет.
Процесс предпочтительно осуществляется в следующей последовательности. Сначала в пределах временных интервалов, заданных временным интервалом F, между приводом 14, 16, 18 и электронным блоком 13, 15, 17 управления происходит непрерывный обмен данными о текущем состоянии по меньшей мере одного привода 14, 16, 18. Если в пределах данного временного интервала F появляется сигнал SA выталкивания, то в конце указанного временного интервала определяется пороговое значение ES чувствительности на основании данных I2, I3, I4, I7, I8, I9 о состоянии, полученных электронным блоком 13, 15, 17 управления в пределах указанного временного интервала F. Затем происходит сравнение данного порогового значения ES чувствительности со значением сигнала SA выталкивания. В зависимости от результата данного сравнения, осуществляется процесс выталкивания, если сигнал (SA) выталкивания превышает пороговое значение (ES) чувствительности, или сигнал (SA) выталкивания игнорируется, если он оказывается ниже порогового значения (ES) чувствительности.
Предлагаемый в настоящем изобретении способ позволяет реализовать важное согласование функций. Предпочтительно каждый привод 14, 16, 18 выполнен с возможностью индивидуальной настройки в зависимости от внешних условий, поскольку текущее состояние всех остальных приводов 14, 16, 18, подключенных к шине 20 данных, известно в любой момент времени. В результате, привод 14, 16, 18 способен снижать чувствительность встроенного пускового датчика 9 в зависимости от числа активных в данный момент времени приводов 14, 16, 18, причем снижение чувствительности происходит постепенно до тех пор, пока пусковой датчик 9 станет полностью нечувствительным. Таким образом, по мере необходимости можно обеспечить более высокую степень защиты от нежелательных воздействий, но и в этом случае пользователь имеет возможность преднамеренно привести в движение указанный предмет мебели 4, 5.
Фиг.4 и 5 иллюстрируют пример успешного сигнала выталкивания и пример игнорируемого сигнала выталкивания соответственно, полученных в результате реализации предлагаемого способа. На обоих чертежах изображен временной интервал F, в пределах которого электронный блок 13, 15, 17 управления, в который был передан сигнал выталкивания, запрашивает различные данные I2, I3, I4, I7, I8, I9 о состоянии, имеющиеся в пределах этого интервала. Данные I1, I5 и I6, I10 лежат за пределами соответствующего временного интервала F, в результате, указанные данные не учитываются.
Например, изображенный на фиг.4 график иллюстрирует сигнал выталкивания, переданный в привод 14. При этом соответствующий электронный блок 13 управления посредством запрошенных данных I2, I3, I4 о состоянии оповещается, например, о том, что привод 14 готов к работе и находится в зацеплении с выдвижным ящиком 4, а привод 16 в текущий момент осуществляет процесс выталкивания. В этом случае электронный блок 13 управления, используя указанные данные I2, I3, I4, вычисляет пороговое значение ES чувствительности, лежащее ниже значения сигнала SA выталкивания, поданного датчиком. Затем электронный блок 13 управления дает приводу 14 команду на осуществление процесса выталкивания.
Например, изображенный на фиг.5 график иллюстрирует сигнал выталкивания, переданный в привод 14. При этом соответствующий электронный блок 13 управления посредством запрошенных данных I7, I8, I9 о состоянии оповещается, например, о том, что привод 14 готов к работе и находится в зацеплении с выдвижным ящиком 4, а привод 16 в текущий момент осуществляет процесс выталкивания выдвижного ящика 5. Причем исключена возможность одновременного выдвижения указанного ящика 5 с ящиком 4, приводимым в движение приводом 14. В этом случае электронный блок 13 управления, используя указанные данные I7, I8, I9, вычисляет пороговое значение ES чувствительности, лежащее выше значения сигнала SA выталкивания, поданного датчиком. После этого электронный блок 13 управления игнорирует сигнал выталкивания, переданный в привод 14, в результате чего процесс выталкивания не осуществляется.
В соответствии с предпочтительным вариантом осуществления предлагаемого способа предусмотрена возможность передачи во внешнюю систему всех данных I1, I2, I3, I4, I5, I6, I7, I8, I9, I10 состоянии, обмен которыми осуществлен через шину 20 данных. Это особенно целесообразно в случае использования предметов мебели, расположенных под углом друг к другу, это позволяет согласовать друг с другом функции нескольких электронных блоков, соединенных между собой посредством нескольких систем шин данных.
Каждому приводу 14, 16, 18 предпочтительно присваивают управляющий адрес, причем все электронные блоки управления способны распознать указанный адрес. Согласно данному варианту изобретения передачу данных через шину осуществляют последовательно.
В соответствии с еще одним вариантом осуществления предлагаемого способа по меньшей мере двум приводам 14, 16, 18 присваивают один и тот же управляющий адрес. В этом случае передачу данных предпочтительно осуществляют, используя принцип разрешения конфликтных ситуаций. Устройства с одинаковым адресом всегда работают одновременно как источники и приемники данных. Все эти устройства в течение одного и того же временного интервала сообщают данные о состоянии и одновременно с этим считывают данные о состоянии. В результате, все блоки (13, 15, 17, 19), подключенные к шине данных, способны реагировать с синхронизацией по времени.
Номера позиций и обозначения
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ОХЛАЖДЕНИЕМ РЕЗЦА | 2014 |
|
RU2586189C2 |
| СПОСОБ УПРАВЛЕНИЯ ДОЗИРОВАНИЕМ ТОПЛИВА НА ЗАПУСКЕ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2316664C1 |
| Способ и устройство управления термоэлементом | 2020 |
|
RU2752492C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОТКЛОНЕНИЯ ПАРАМЕТРОВ СИЛОВОЙ ТУРБИНЫ ТУРБОМАШИННОГО АГРЕГАТА ПРИ ВНЕЗАПНОМ ПОЛНОМ ИЛИ ЧАСТИЧНОМ СБРОСЕ НАГРУЗКИ | 2002 |
|
RU2225945C2 |
| СПОСОБ И СЕРВЕР ДЛЯ ПРЕДСТАВЛЕНИЯ ЭЛЕМЕНТА РЕКОМЕНДУЕМОГО СОДЕРЖИМОГО ПОЛЬЗОВАТЕЛЮ | 2017 |
|
RU2699574C2 |
| Цифровой преобразователь расхода электропроводной жидкости | 2021 |
|
RU2755715C1 |
| Способ возобновления подачи топлива при предотвращении отклонения параметров силовой турбины турбомашинного агрегата при внезапном полном или частичном сбросе нагрузки | 2022 |
|
RU2789805C1 |
| СПОСОБ КАЛИБРОВКИ НАПРЯЖЕНИЯ СМЕЩЕНИЯ НУЛЯ КОМПАРАТОРА АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2301427C1 |
| СПОСОБ И СЕРВЕР СОЗДАНИЯ РЕКОМЕНДОВАННОГО НАБОРА ЭЛЕМЕНТОВ | 2015 |
|
RU2632100C2 |
| ОПТИЧЕСКИЙ ФИЛЬТР ДЛИН ВОЛН И ОПТИЧЕСКИЙ ДЕМУЛЬТИПЛЕКСОР | 1997 |
|
RU2188512C2 |
Изобретение относится к способу управления приводом для мебели посредством электронного блока управления и направлено на исключение возможности непреднамеренного или случайного запуска привода. Способ управления приводом для мебели, который приводит в движение элемент мебели, выполненный с возможностью перемещения относительно корпуса мебели, и содержит следующие этапы:
- регулярно производят обмен данными о текущем состоянии привода между приводом и электронным блоком управления в пределах временных интервалов, заданных временным интервалом (F),
- регулярно определяют пороговое значение чувствительности на основании данных о состоянии, полученных электронным блоком управления в пределах указанного временного интервала;
- фиксируют появление сигнала выталкивания в пределах временного интервала;
- сравнивают пороговое значение чувствительности со значением сигнала выталкивания;
- осуществляют процесс выталкивания, если сигнал выталкивания превышает пороговое значение чувствительности, или;
- игнорируют сигнал выталкивания, если сигнал выталкивания меньше порогового значения чувствительности. 2 н. и 15 з.п. ф-лы, 5 ил.
1. Способ управления по меньшей мере одним приводом (14, 16, 18) для мебели посредством электронного блока (13, 15, 17) управления, причем указанный привод приводит в движение по меньшей мере один элемент (4, 5) мебели, выполненный с возможностью перемещения относительно корпуса (2, 3) мебели, отличающийся тем, что способ содержит следующие этапы:
a) регулярно производят обмен данными о текущем состоянии привода (14, 16, 18) между приводом (14, 16, 18) и электронным блоком (13, 15, 17) управления в пределах временных интервалов, заданных временным интервалом (F),
b) регулярно определяют пороговое значение (ES) чувствительности на основании данных (I2, I3, I4, I7, I8, I9) о состоянии, полученных электронным блоком (13, 15, 17) управления в пределах указанного временного интервала (F);
c) фиксируют появление сигнала (SA) выталкивания в пределах временного интервала (F);
d) сравнивают пороговое значение (ES) чувствительности со значением сигнала (SA) выталкивания;
e) осуществляют процесс выталкивания, если сигнал (SA) выталкивания превышает пороговое значение (ES) чувствительности или;
f) игнорируют сигнал (SA) выталкивания, если сигнал выталкивания (SA) меньше порогового значения (ES) чувствительности.
2. Способ по п.1, отличающийся тем, что выполнение процесса выталкивания обуславливает изменение данных (I1, I2, I3, I4, I5, I6, I7, I8, I9, I10) о состоянии.
3. Способ по п.1 или 2, отличающийся тем, что наличие процесса выталкивания, выявленное в пределах временного интервала (F), приводит к увеличению порогового значения (ES) чувствительности.
4. Способ по любому из пп.1 и 2, отличающийся тем, что выполненный процесс выталкивания обуславливает изменение данных (I1, I2, I3, I4, I5, I6, I7, I8, I9, I10) о состоянии.
5. Способ по любому из пп.1 и 2, отличающийся тем, что наличие завершенного процесса выталкивания, выявленное в пределах временного интервала (F), приводит к понижению порогового значения (ES) чувствительности.
6. Способ по любому из пп.1 и 2, отличающийся тем, что наличие сцепления привода с подвижным элементом мебели, выявленное в пределах временного интервала (F), в качестве данных о состоянии приводит к понижению порогового значения (ES) чувствительности.
7. Способ по любому из пп.1 и 2, отличающийся тем, что готовность привода к работе, выявленная в пределах временного интервала (F), в качестве данных о состоянии, приводит к понижению порогового значения (ES) чувствительности.
8. Способ по любому из пп.1 и 2, отличающийся тем, что каждым приводом (14, 16, 18) для мебели управляют отдельным электронным блоком (13, 15, 17) управления.
9. Способ по п.8, отличающийся тем, что электронные блоки (13, 15, 17) управления соединяют друг с другом через шину (20) данных.
10. Способ по п.9, отличающийся тем, что к шине (20) данных подключают по меньшей мере один дополнительный электронный блок (19), предоставляющий данные (I1, I2, I3, I4, I5, I6, I7, I8, I9, I10) о состоянии.
11. Способ по п.10, отличающийся тем, что дополнительный электронный блок (19) предоставляет данные (I1, I2, I3, I4, I5, I6, I7, I8, I9, I10) о температуре и влажности окружающей среды или о вибрациях.
12. Способ по любому из пп.1, 2 или 9-11, отличающийся тем, что каждому приводу (14, 16, 18) присваивают управляющий адрес, а появление дополнительного сигнала (SA) выталкивания обуславливает начало второго временного интервала (F).
13. Способ по п.12, отличающийся тем, что по меньшей мере двум приводам (14, 16, 18) присваивают одинаковый управляющий адрес.
14. Способ по любому из пп.9-11 или 13, отличающийся тем, что все данные (I1, I2, I3, I4, I5, I6, I7, I8, I9, I10) о состоянии, обмен которыми осуществляют через шину (20) данных, передают во внешнюю систему.
15. Способ по любому из пп.9-11 или 13, отличающийся тем, что передачу данных через шину (20) данных осуществляют последовательно.
16. Способ по любому из пп.9-11 или 13, отличающийся тем, что передачу данных через шину (20) данных осуществляют по принципу разрешения конфликтных ситуаций.
17. Устройство управления, предназначенное для управления приводами для мебели, содержащее по меньшей мере один электронный блок (13, 15, 17) управления, предназначенный для управления по меньшей мере одним приводом (14, 16, 18), который приводит в движение по меньшей мере один элемент (13, 15) мебели, выполненный с возможностью перемещения относительно корпуса (2, 3) мебели, отличающееся тем, что электронный блок (13, 15, 17) управления использует способ управления по меньшей мере одним приводом (14, 16, 18) посредством электронного блока (13, 15, 17) управления по любому из пп.1-16.
| WO 2008031748 A2, 20.03.2008 | |||
| WO 2007009133 A1, 25.01.2007 | |||
| DE 10159336 A1, 05.12.2002 | |||
| Следящая система | 1977 |
|
SU696407A1 |
| DE 88026558 U1, 18.08.1988 | |||
| JP 2004024436 A, 29.01.2004 | |||
| Устройство для стабилизации скорости шунтового электрического двигателя постоянного тока | 1932 |
|
SU28957A1 |

