(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Устройство для отработки заданногоположения регулирующего органа | 1973 |
|
SU508779A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 1968 |
|
SU207966A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| Устройство для испытаний механических элементов антенн | 1975 |
|
SU620939A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Прибор для контроля несимметрии расположения зубцов магнитопровода электрической машины | 1980 |
|
SU936246A2 |
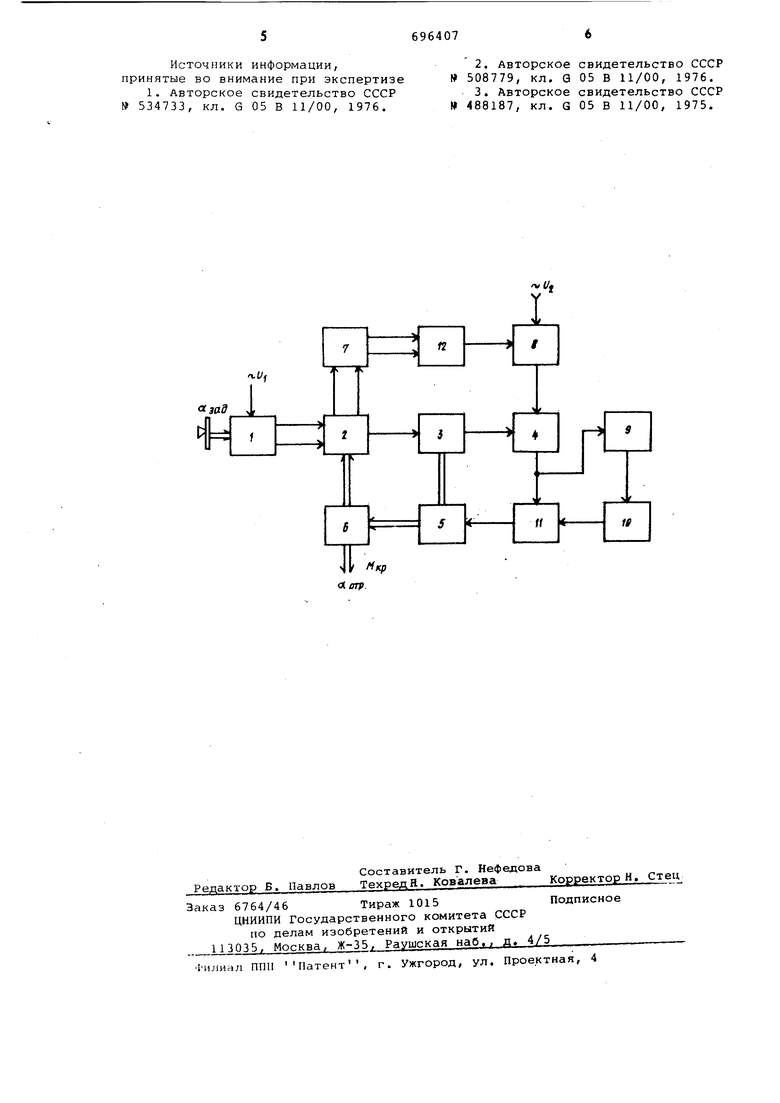
Изобретение относится к области электрического следящего привода дл автоматического регулирования и упр ления особо ответственными объектам например, судовыми газотурбинными двигателями. Известны электрические следящие CHCTeNtJ 11 и 2 . В них не решается вопрос исключения ложных срабатываний при обрывах или коротких эалвлканиях в сигнал ных проводах, соединяющих задающий и принимающий датчики. Ближайшей по технической сущности является следящая система, содер,жащая последовательно соединенные задающий вращающийся трансформатор, принимающий вращающийся трансформатор, тахогенератор и усилитель переменного тока, и исполнительный двигатель, выходной вал которого жестко связан с валом тахогенератора и через редуктор - с ротором принима щего вращающегося трансформатора 3 Однако эта система не исключает возможности ложных срабатываний при включении системы в случае рассогласования положений задающего и приним-чкицч-о датчика, а также при об,рывах и замыканиях в сигнальных проводах. Цель предлагаемого изобретения повышение надежности системы. Для этого в систему дополнительно введены два пороговых элемента, два ключа, элемент И и блок памяти, причем соответствующие выходы принимающего вращающегося трансформатора через последовательно соединенные первый пороговый элемент, элемент И и первый ключ соединены с соответствукядим входом усилителя переменного тока, выход которого непосредственно и через последовательно соединенные второй пороговый элемент и.блок памяти подключен к входу второго ключа, выход которого соединен со входом исполнительного двигателя. На чертеже приведена блок-схема предлагаемой следящей системы. Она содержит задающий вращающийся трансформатор (ВТ) 1, принимающий вращающийся трансформатор (ВТ) 2, тахогенератор 3, усилитель 4 переменного тока, исполнительный двигатель 5, редуктор 6, первый пороговый элемент 7, первый ключ 8, второй пороговый элемент 9, блок 10 памяти, второй ключ 11, элемент И 12,и,и„ - питающие напряжения переменного тока. На одну из статорных обмоток задающего ВТ 1 подключено питающее напряжение.переменного тока U . Роторные обмотки ВТ 1 подключены CJOOTвественно к статорным обмоткам ВТ 2. Одна из статорных обмоток ВТ 2 соеди нена последовательно с обмоткой упра ления тахогенератора,3 и подключена ко входу усилителя 4 переменного ток Вал исполнительного электродвигателя 5 жестко соединен с валом техогене-ратора 3 и через редуктор б соединен с ВТ 2. На выходе редуктора 6 расположен выходной вал системы. К статорным обмоткам ВТ 2 подключен сдвоенный пороговый элемент 7, выходы которого подключены к первому и второму входам элемента И 12. Выход элемента И 12 подключен к управляющему входу первого ключа 8, через который на усилитель 4 переменного тока подключается питающее напряжение и К выходу усилителя 4 переменного тока подключены последовательно второй пороговый элемент 9, блок 10 памяти и ключ 11, через который выход усилителя 4 подключается к обмотке управления исполнительного двигателя 5. Отличительные признаки предлагаемой системы достигаются применением дополнительных элементов и, кротче того, благодаря тому, что вiзадающем и принимающем ВТ датчиках электрический ноль сдвинут влево на угол t (около 2-6°) относительно геометрического ноля, т. е. ноля по шк ле задания и отработки. Поэтому в исходном положении ВТ датчиков - пр 0° по щкалам задания и отработки выходе синусной статорной обмотки принимающих ВТ 2 будет напряжение 0 (выбирается2-5 В), а на косинусной Статорной обмотке будет напряжение маньше максимального на эту величин При отработке в рабочих пределах от 0° до (90-) - рабочая зона угло задания выбирается без перехода чер электрический ноль - напряжение на торных. обмотках прингдмающего ВТ 2 Всегда больше или равно U. При это на обоих выходах первого порогового элемента будут единичные сигналы, на выходе элемента И 12 также будет единичный сигнал, первый ключ 8 буд открыт и на усилитель 4 переменног тока будет поступать напряжение пит ния Uj. Если произойдет обрыв или короткое Зс1мыкание хотя бы в одном из сигнальных проводов, соединяющих ВТ, то на выходе логического элемен И 12 исчезнет единичный сигнал, первый электронный ключ 8 закроется и Усилитель 4 переменного тока обес очится. Этим будет;предотвращено ожное срабатывание системы при обрыах -или коротких замыканиях в проодах . При включении .следящей системы, огда задающий и принимающий ВТ аходятся в рассогласованном полоении, на выходе усилителя 4 переенного тока будет напряжение, больее остаточного. Второй пороговый элемент 9, настроенный на уставку напряжения U., (U выбирается в зависимости от требуемой точности исходного согласования ВТ 1, 2 системы) всегда, когда напряжение на выходе усилителя 4 переменного тока превышает U , выдает нулевойО сигнал. При этом на выходе блока 10 памяти также будет нулевой сигнал, второй электронный ключ 11 будет закрыт и, следовательно, исполнительный двигатель 5 не будет отрабатывать угол рассогласования. Для подключения следящей системы в работу необходимо выполнить исходное согласование ВТ 1 и ВТ 2. При этом на выходе усилителя 4 переменного тока напряжение уменьшится до величины, равной или меньше уставкиU, сработает второй пороговый элемент 9 и переключит блок 10 памяти, откроется второй электронный ключ 11 и произойдет включение следящей системы. В результате этого исключается возм.ожность ложных срабатываний следящей системы. Формула изобретения Следящая система, содержащая последовательно соединенные задающий вращающийся трансформатор,принимающий вращаквдийся трансформатор, тахогенератор и усилитель переменного тока, и исполнительный двигатель, выходной вал которого жестко связан с валом тахогенератора и через редуктор - с ротором принимающего вращающег.ося трансформатора, отличающаяся тем, что, с целью повышения надежности системы, она содержит два пороговых элемента, два ключа, элемент И и блок памяти, причем-соответствующие выходы принимающего вращающегося трансформатора через последовательно соединенные первый пороговый элемент, элемент И и первый ключ соединены с соответствующим входом усилителя переменного тока, выход которого непосредственно и через последовательно соединенные второй пороговый элемент и блок памяти подключен к входу второго ключа, выход которого соединен со входом исполнительного двигателя.
Источники информации, принятые во внимание при экспертизе
свидетельство СССР 508779, кл. Q 05 В 11/00, 1976.
11
Латр.
