Изобретение относится к ракетно-космической технике, а именно к ракетам-носителям (РН), предназначенным для выведения в космос космических аппаратов.
В ракетной технике известна выбранная в качестве прототипа РН «KSLV-1», содержащая один маршевый двигатель в карданном подвесе, отделяемая первая ступень которой содержит установленные в хвостовой части ступени аэродинамические рули с гидравлическими сервоприводами для управления движением РН по крену на участке прохождения наибольших скоростных напоров ([1], стр.28). Управление движением по тангажу и рысканию на участке работы первой ступени осуществляется путем отклонения маршевого двигателя в карданном подвесе в двух взаимноперпендикулярных плоскостях ([1], стр.28).
Недостатком прототипа являются значительные размеры района, отводимого для падения отработавшей первой ступени РН из-за рассеивания точек падения ступени или отдельных ее частей на Землю. Анализ движения отработавшей первой ступени показывает, что после входа в плотные слои атмосферы, отработавшая первая ступень ракеты стабилизируется и летит с балансировочным углом атаки, существенно зависящим от положения центра масс и числа Маха. С уменьшением скорости балансировочный угол атаки приближается к 180° (полет маршевым двигателем вперед) (см. [2], стр.20-25). При этом размещенные в хвостовой части первой ступени аэродинамические рули либо разрушаются при входе ступени в плотные слои атмосферы, либо сдвигают центр давления ближе к хвостовому отсеку, что увеличивает рассеивание точек падения отработавшей первой ступени ([2], стр.27). Дополнительную неопределенность в аэродинамические характеристики ступени вносит отсутствие давления в гидравлических сервоприводах аэродинамических рулей, что влечет за собой их неуправляемые повороты вокруг осей вращения под действием аэродинамических шарнирных моментов и моментов сил трения.
В ракетной технике известны способы уменьшения рассеивания точек падения отработавших ступеней путем смещения центра давления в сторону носовой части ступени и закрутки ступени вокруг продольной оси ([2], стр.109). Для этого используются специально устанавливаемые в носовой части ступени аэродинамические щитки, панели, тормозные экраны, выдвижные и разворачивающиеся крылья и др. ([2], стр.111-112). Однако использование всех этих устройств увеличивает массу конструкции ступени и тем самым снижает массу выводимой полезной нагрузки.
Задачей изобретения является использование аэродинамических рулей РН по двойному назначению:
- для управления движением по крену на участке выведения на орбиту в плотных слоях атмосферы;
- в качестве аэродинамических щитков, смещающих центр давления к носовой части ступени и обеспечивающих закрутку ступени вокруг продольной оси на участке спуска отработавшей первой ступени.
Техническим результатом предлагаемого изобретения является уменьшение рассеивания точек падения отработавшей первой ступени за счет использования аэродинамических рулей на участке спуска первой ступени, что позволит уменьшить площади земельных участков, выделяемых под районы падения отделяемых частей ракет-носителей, при сохранении массы выводимой на орбиту полезной нагрузки.
Указанный технический результат достигается тем, что в РН, содержащей один маршевый двигатель в карданном подвесе, отделяемая первая ступень которой содержит аэродинамические рули с гидравлическими сервоприводами для управления движением по крену на участке прохождения наибольших скоростных напоров при выведении РН на орбиту, в соответствии с изобретением, гидравлические сервоприводы снабжены гидрозамками с возможностью автоматической фиксации в заданном положении при выключенном маршевом двигателе и отсутствии давления в гидравлических сервоприводах аэродинамических рулей, установленных в носовой части отделяемой первой ступени РН.
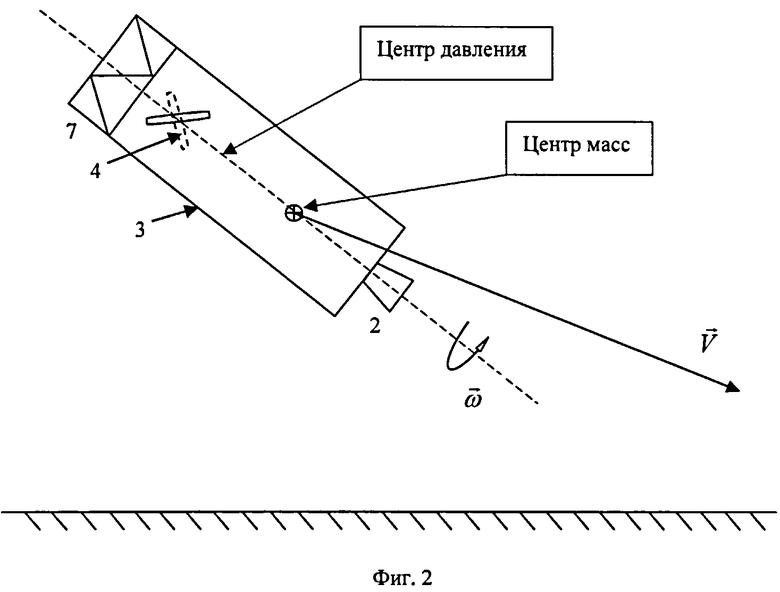
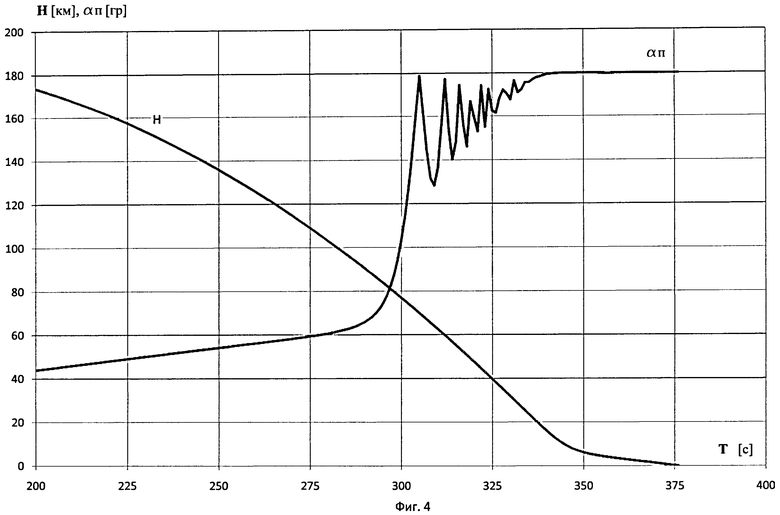
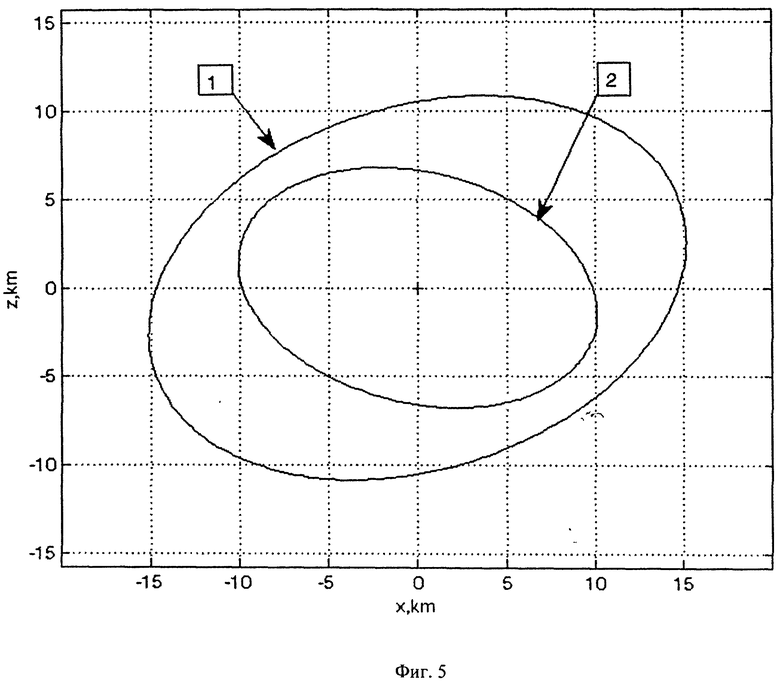
Сущность предлагаемого изобретения иллюстрируется фиг.1-5, где на фиг.1 показана РН на старте, на фиг.2 - отработавшая первая ступень на участке спуска, на фиг.3 и 4 - зависимости от времени высоты полета и пространственного угла атаки отработавшей ступени на участке спуска для РН прототипа и предлагаемой РН соответственно, на фиг.5 - эллипсы рассеивания точек падения отработавшей первой ступени на Землю (1 - для РН-прототипа, 2 - для предлагаемой РН).
Количество аэродинамических рулей на РН может быть различным (например, 2, 4 или 6). На фиг.1 и 2 показана РН с двумя аэродинамическими рулями.
Ракета-носитель 1 содержит один маршевый двигатель 2 в карданном подвесе, отделяемая первая ступень 3 которой содержит аэродинамические рули 4 с гидравлическими сервоприводами 5 для управления движением по крену на участке прохождения наибольших скоростных напоров при выведении ракеты-носителя на орбиту, при этом гидравлические сервоприводы 5 снабжены гидрозамками 6 с возможностью автоматической фиксации в заданном положении при выключенном маршевом двигателе 2 и отсутствии давления в гидравлических сервоприводах 5 аэродинамических рулей 4, установленных в носовой части 7 отделяемой первой ступени 3 ракеты-носителя 1.
До включения маршевого двигателя 2 давление в гидравлических сервоприводах 5 отсутствует и аэродинамические рули 4 зафиксированы с помощью гидрозамков 6 в заданном (для последующего за участком выведения участка спуска) положении (см. фиг.1). Одна из возможных конструкций гидрозамка 6 приведена в [3], стр.431. После нарастания тяги маршевого двигателя 2 до номинального значения происходит отрыв ракеты-носителя 1 от пускового устройства, практически одновременно с этим давление в гидравлических сервоприводах 5 достигает рабочего уровня, аэродинамические рули 4 снимаются с гидрозамков 6 и занимают (при отсутствии команд от системы управления) нейтральное положение. Так как аэродинамические рули становятся эффективными лишь при достаточно большой скорости полета, в процессе старта они не создают нежелательных возмущающих моментов при любом своем отклонении.
При малых значениях скоростного напора (на начальном участке полета, а также на участке выведения после прохождения плотных слоев атмосферы) для управления движением по крену необходимо использовать газодинамические органы управления (например, вспомогательные двигатели, реактивные сопла, газодинамические рули и др.). Например, на РН «KSLV-1» - прототипе изобретения для этой цели используются газовые сопла ([1], стр.28). На фиг.1 газодинамические органы управления не показаны.
При достижении скоростным напором значений, при которых становится возможным и необходимым использование аэродинамических рулей 4 для управления движением по крену, эти рули начинают отклоняться по командам системы управления. При этом эффективность аэродинамических рулей по крену не изменяется при переносе рулей из хвостовой части первой ступени РН (как в прототипе) в ее носовую часть (как в изобретении), так как плечо управляющей силы остается неизменным. Кроме того, при переносе аэродинамических рулей из хвостовой части в носовую устраняется газодинамическое воздействие струи маршевого двигателя 2 на аэродинамические рули 4, которое может привести к недопустимому нагреву рулей и требует их теплозащиты.
В течение всего полета управление движением РН в каналах тангажа и рыскания осуществляется с помощью поворотов установленного в карданном подвесе маршевого двигателя 2. Кроме того, турбонасосный агрегат работающего маршевого двигателя обеспечивает рабочее давление в гидравлических сервоприводах как самого маршевого двигателя, так и аэродинамических рулей.
После выключения маршевого двигателя 2 давление в гидравлических сервоприводах 5 становится равным 0 и аэродинамические рули 4 оказываются зафиксированными с помощью гидрозамков 6 в заданном положении, наиболее целесообразном для участка спуска. Это положение зависит от аэродинамических и центровочных характеристик конкретной РН, количества аэродинамических рулей и др. В частности, для РН с двумя аэродинамическими рулями таким заданным положением может быть их дифференциальное отклонение на заранее выбранный угол (см. фиг.2). При этом на участке спуска аэродинамические рули играют роль неподвижно закрепленных аэродинамических щитков.
После отделения отработавшей первой ступени, она совершает спуск с выключенным основным двигателем в отведенный для этой цели район падения. Как отмечается в книге [2] (стр.19), за счет сдвига центра давления ближе к носовому отсеку с помощью щитков можно достигнуть уменьшения рассеивания точек падения ступени. Еще одним фактором, обеспечивающим сокращение размеров района падения отработавшей ступени, является ее закрутка вокруг продольной оси ([2], стр.112), являющаяся результатом дифференциального отклонения аэродинамических рулей на участке спуска.
На фиг.3 и 4 представлены полученные с помощью математического моделирования движения зависимости от времени высоты полета H и пространственного угла атаки αn для РН-прототипа и предлагаемой РН. В моделировании предполагалось, что отделение отработавшей первой ступени происходит на высоте около 116 км с углом тангажа, равным приблизительно 24°. Время на фиг.3 и 4 указывается от момента отделения первой ступени. К 300 с первая ступень на высоте около 80 км входит в плотные слои атмосферы, совершает несколько оборотов и после постепенно затухающих колебаний занимает устойчивое положение хвостовой частью вперед. Однако спуск первой ступени РН-прототипа осуществляется с балансировочным пространственным углом атаки, равным 160°-170°, при этом на ступень действует подъемная сила с коэффициентом CY≈3, в то время как ступень с переставленными в носовую часть и закрепленными аэродинамическими рулями спускается с пространственным углом атаки αn≈180°, при этом подъемная сила практически отсутствует. В связи с этим предлагаемая РН имеет меньшее время полета (≈ на 20-25 с) и меньшее рассеивание точек падения. На фиг.5 показаны эллипсы рассеивания точек падения для РН прототипа (эллипс 1 с полуосями 15,55 км и 10,92 км) и предлагаемой РН (эллипс 2 с полуосями 10,25 км на 6,54 км). Каждый из эллипсов рассчитан по результатам статистического моделирования в объеме 1000 реализации и соответствует вероятности попадания в них р=0,99. Как следует из проведенного расчета, площадь эллипса рассеивания точек падения первой ступени для предлагаемой РН уменьшается в 2,5 раза.
Таким образом, благодаря реализации предложенного в изобретении технического решения достигается указанный технический результат, а именно уменьшение рассеивания точек падения отработавшей первой ступени, что позволит уменьшить площади земельных участков, выделяемых под районы падения, при сохранении массы выводимой на орбиту полезной нагрузки.
Источники информации
1. Новости космонавтики, №10 (321), том 19, 2009 г.
2. Э.П.Компаниец и др. Исследование путей сокращения размеров районов падения отделяющихся частей ракет. «Машиностроение», 1990 г.
3. Т.М.Башта. Машиностроительная гидравлика. «Машиностроение», 1971 г.

Изобретение относится к ракетно-космической технике, а именно к ракетам-носителям для выведения в космос космических аппаратов. Ракета-носитель содержит один маршевый двигатель в карданном подвесе и отделяемую первая ступень. Первая ступень содержит аэродинамические рули с гидравлическими сервоприводами для управления движением по крену на участке прохождения наибольших скоростных напоров при выведении ракеты-носителя на орбиту. Гидравлические сервоприводы снабжены гидрозамками с возможностью автоматической фиксации в заданном положении при выключенном маршевом двигателе и отсутствии давления в гидравлических сервоприводах аэродинамических рулей, установленных в носовой части отделяемой первой ступени ракеты-носителя. Достигается уменьшение рассеивания точек падения отработавшей первой ступени. 5 ил.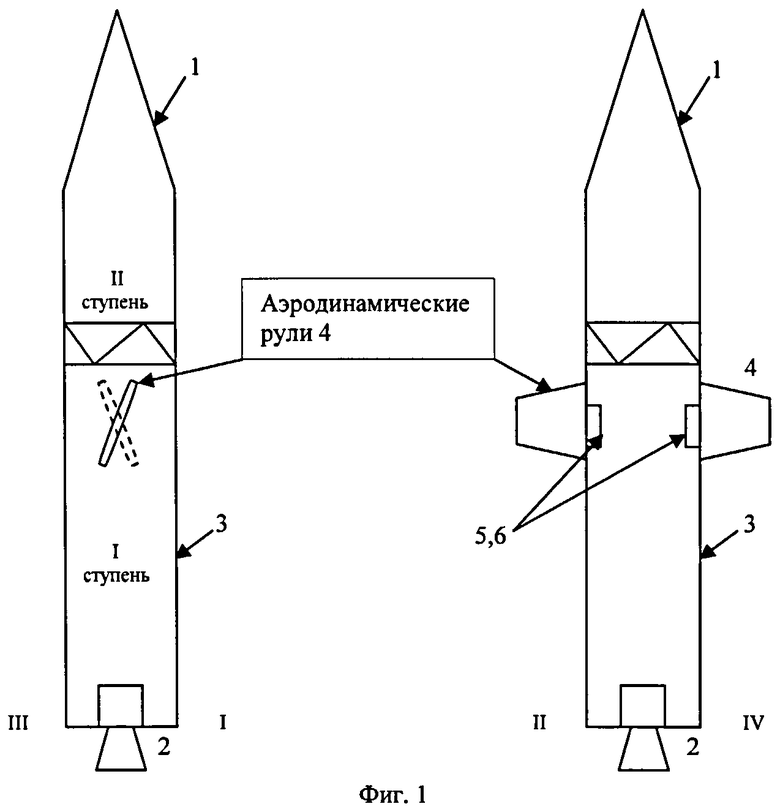
Ракета-носитель, содержащая один маршевый двигатель в карданном подвесе, отделяемая первая ступень которой содержит аэродинамические рули с гидравлическими сервоприводами для управления движением по крену на участке прохождения наибольших скоростных напоров при выведении ракеты-носителя на орбиту, отличающаяся тем, что гидравлические сервоприводы снабжены гидрозамками с возможностью автоматической фиксации в заданном положении при выключенном маршевом двигателе и отсутствии давления в гидравлических сервоприводах аэродинамических рулей, установленных в носовой части отделяемой первой ступени ракеты-носителя.
| СПОСОБ СПУСКА УСКОРИТЕЛЯ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ В ПОСАДОЧНУЮ ЗОНУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2043954C1 |
| ДВУХСТУПЕНЧАТАЯ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 1996 |
|
RU2110755C1 |
| US 2009277990 A1, 12.11.2009 | |||
| US 6308911 B1, 30.10.2001. | |||

