Изобретение относится к оборонной технике и, в частности к методам проведения испытаний систем топопривязки и навигации, устанавливаемым на шасси наземных транспортных средств.
Известен способ контроля работоспособности и точностных характеристик навигационной аппаратуры топопривязчика (ТП) (см. патент №2436044 от 10.12.2011 г.), принятый за прототип.
Способ заключается в том, что проверка точности работы топопривязчика производится по результатам прокладки маршрута между контрольными точками, после чего на основе определенных топопривязчиком значений координат и дирекционного угла направления продольной оси рассчитываются ошибки в определении координат и дирекционного угла, и далее на основании полученных ошибок рассчитываются среднеквадратические ошибки определения координат и сравниваются с установленными предельными значениями. Процесс контроля навигационной аппаратуры топопривязчика разделен на три функциональных блока контрольных операций: блок операций по контролю работоспособности навигационной аппаратуры, блок контрольных операций, проводимых при первоначальном ориентировании, блок контрольных операций по определению точностных характеристик навигационной аппаратуры. Блок операций по контролю работоспособности включает в себя проверки по следующим параметрам: время подготовки топопривязчика к работе, возможность выполнения работ без выхода расчета из топоривязчика на начальной и привязываемых точках, за исключением работ, проводимых с выносным оборудованием для топогеодезических определений и фиксации на местности элементов артиллерийской топогеодезической сети, возможность непрерывной работы топопривязчика до 24 часов без изменения точностных характеристик навигационной аппаратуры, возможность сохранения информации о своем местоположении при санкционированном выключении электропитания. Блок контрольных операций, проводимых при первоначальном ориентировании, включает в себя проверки по следующим параметрам: возможность начального ориентирования комплектом навигационного бортового оборудования с использованием исходных данных ориентирных направлений и автономно с помощью бортовых и выносных средств, входящих в состав топопривязчика, возможность аппаратуры ТП обеспечивать работу с начальными координатами, вводимыми как вручную, так и автоматически, передаваемыми с навигационной аппаратуры потребителей космической навигационной аппаратуры (НАП КНС). Блок контрольных операций по определению точностных характеристик навигационной аппаратуры включает в себя проверки по следующим параметрам: точность определения приращений плановых координат в автономном режиме работы без использования информации о скорости от внешних источников, точность определения приращений плановых координат от пройденного пути с использованием информации о скорости от внешних источников, точность определения приращений плановых координат и высоты с непрерывной коррекцией в движении по сигналам НАП КНС и системы определения высоты (СОВ), точность определения дирекционного угла продольной оси базового шасси ТП и точность определения углов тангажа и крена в движении и на стоянке.
Недостатками прототипа являются:
- отсутствие операции по технологической приработке и калибровке системы топопривязки и навигации (СТН);
- недостаточно развернутый уровень проверок;
- отсутствие контрольных операций при работе с цифровыми картами местности;
- отсутствие контрольных операций и анализа возможности работы СТН в различных диапазонах географических широт и высот над уровнем моря;
- отсутствие контрольных операций по определению точностных и временных характеристик НАП КНС.
Предлагаемым изобретением решается задача по повышению эффективности проведения испытаний универсальной системы топопривязки и навигации, устанавливаемой на шасси наземных транспортных средств.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа проведения испытаний универсальной системы топопривязки и навигации, которые определяют комплекс операций по контролю навигационной аппаратуры, выполненной с возможностью размещения на шасси наземных транспортных средств различного типа, включающий в себя работы по контролю технических данных по назначению, тактических и технических характеристик.
Указанный технический результат достигается тем, что в предлагаемом способе проведения испытаний универсальной системы топопривязки и навигации, заключающемся в том, что процесс контроля системы топривязки и навигации (СТН) разделен на три функциональных блока контрольных операций: блок операций по контролю работоспособности, блок контрольных операций при первоначальном ориентировании, блок контрольных операций по определению точностных характеристик; проводится по результатам прокладки маршрута между контрольными точками, расчета на основе полученных параметров средних квадратических погрешностей и сравнения их с установленными предельными значениями, новым является то, что для проведения испытаний используется технологическое наземное транспортное средство (НТС), на котором при помощи технологических средств монтируются элементы контролируемых систем, перед контрольными операциями проводят операции по технологической приработке и калибровке СТН, в блок операций по контролю работоспособности дополнительно введены проверки: режима работы СТН с цифровыми картами местности, возможности обеспечения заданных характеристик по назначению в диапазоне географических широт от 70° Северной широты до 70° Южной широты в любое время суток, в любых дорожных условиях, допускающих движение НТС, возможности обеспечения работы СТН на местности с абсолютной высотой до 4000 м над уровнем моря, в блок контрольных операций при первоначальном ориентировании дополнительно введена проверка обеспечения определения координат начальной точки X, Y и высоты Н по карте (с впечатанными координатами) или на геодезической основе с помощью приборов (ручной ввод в бортовой вычислитель), в блок контрольных операций по определению точностных характеристик введена оценка точности и времени первоначального определения прямоугольных координат с помощью навигационной аппаратуры потребителей космических навигационных систем (НАП КНС).
Использование для проведения испытаний технологического НТС, на котором при помощи технологических средств монтируются элементы контролируемых систем, позволяет:
- обеспечить размещение аппаратуры СТН;
- при помощи технологических кабелей выполнить электрические соединения аппаратуры СТН;
- оборудовать рабочие места для испытателей;
- обеспечить проведение испытаний необходимого количества универсальных СТН.
Введение в блок операций по контролю работоспособности проверки режима работы СТН с цифровыми картами местности позволяет:
- оценить обеспечение СТН при выполнении задач по назначению загрузки в бортовой вычислитель цифровых карт местности с внешнего накопителя;
- обеспечить проверку возможности создания картографического архива, охватывающего территориально район прокладки маршрута;
- обеспечить проверку возможности работы с картами любого масштаба;
- обеспечить проверку выполнения автоматической смены листов цифровой карты местности при выходе технологического НТС за их границу;
- обеспечить проверку выполнения автоматического определения на цифровой карте местности координат X, Y и высоты Н точек, отмеченных курсором испытателя.
Проведение перед контрольными операциями технологической приработки и калибровки СТН позволяет:
- выявить скрытые дефекты системы;
- определить и ввести в бортовой вычислитель значения формулярных поправок.
Введение в блок операций по контролю работоспособности проверки возможности обеспечения заданных характеристик по назначению в диапазоне географических широт от 70° Северной широты до 70° Южной широты в любое время суток, в любых дорожных условиях, допускающих движение НТС, позволяет подтвердить возможность эксплуатации СТН в условиях вышеперечисленных факторов.
Введение в блок операций по контролю работоспособности проверки возможности обеспечения работы СТН на местности с абсолютной высотой до 4000 м над уровнем моря позволяет подтвердить возможность ее эксплуатации в условиях горной местности.
Введение в блок контрольных операций при первоначальном ориентировании проверки обеспечения определения координат начальной точки X, Y и высоты Н по карте (с впечатанными координатами) или на геодезической основе с помощью приборов с дальнейшим ручным вводом данных в бортовой вычислитель позволяет проконтролировать весь спектр возможностей по неавтоматизированному определению начальных координат НТС.
Введение в блок контрольных операций по определению точностных характеристик оценки точности и времени первоначального определения прямоугольных координат с помощью НАП КНС позволяет оценить качественные и временные результаты автоматизированного определения координат начальной точки НТС.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
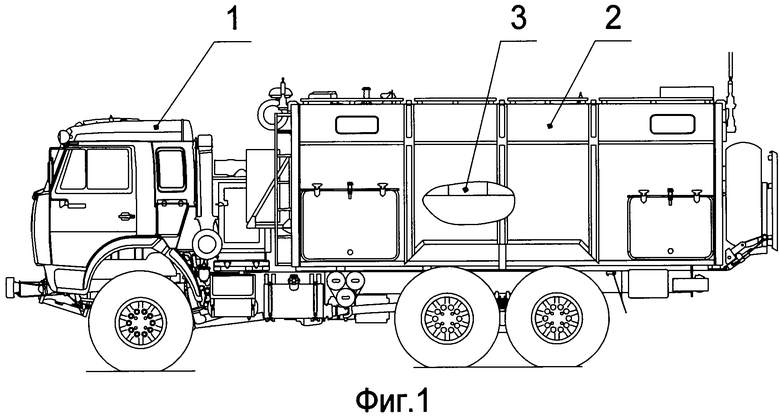
Сущность изобретения поясняется чертежами, где на фиг.1 показан общий вид технологического НТС; на фиг.2 - схема соединений при контроле функционирования и параметров системы.
Способ проведения испытаний универсальной СТН осуществляется при помощи средств, необходимых для его реализации, следующим образом.
Комплект средств для проведения испытаний универсальной системы топопривязки и навигации, состоит из технологического наземного транспортного средства 1, оснащенного кузовом - фургоном 2, в котором оборудовано рабочее место 3 для испытателей. На рабочем месте 3 установлены технологическая специализированная ЭВМ 4, модуль отображения (МО) 5, клавиатура (К) 6 и устройство загрузки данных (УЗД) 7. На панелях кузова - фургона 2 закреплены технологические распределительная плата (РП) 8 и распределительное устройство (РУ) 9. Технологические аккумуляторные батареи (ТАБ) 10 размещены на панели пристеночной ниши кузова - фургона 2. Универсальная СТН и технологическое оборудование электрически связано посредством комплекта технологических кабелей 11.
СТН состоит из автономной базовой инерциальной системы наземной навигации (БИС НН) 12 в составе: бесплатформенной инерциальной системы навигации (БИНС) 13, НАП КНС 14, блока согласования (БС) 15 и универсального механического датчика скорости (УМДС) 16, системы определения высоты (СОВ) 17 в составе: блока обработки данных (БОД) 18, датчика температуры (ДТ) 19 и измерителя цифрового атмосферного давления (ИЦАД) 20, датчика скорости доплеровского (ДСД) 21.
Перед началом проведения испытаний аппаратура СТН устанавливается и закрепляется в кузове - фургоне 2 технологического НТС 1. Испытатели размещаются на рабочем месте 3.
Перед контрольными операциями проводят операции по технологической приработке и калибровке СТН. Технологическая приработка предназначена для выявления скрытых дефектов системы.
Технологическая приработка системы проводится тремя восьмичасовыми циклами. Это время может быть уменьшено или увеличено в зависимости от эффекта приработки. После подачи напряжения включают систему. Электропитание СТН осуществляется от технологических аккумуляторных батарей 10. Контролируют отсутствие на модуле отображения 5 специализированной ЭВМ 4 сообщений об отказах составных частей системы. СТН оставляют во включенном состоянии 8 ч., проводя периодический контроль индикации. После чего СТН выключают. Последующие два восьмичасовые цикла проводят аналогично первому. При отсутствии сообщений об отказах переходят к процессу калибровки СТН.
Калибровку проводят на испытательной трассе с известными координатами начальной и конечной точки.
Технологическое НТС устанавливается на начальной точке маршрута. СТН переводится в режим выполнения задачи «Калибровка», в технологическую специализированную ЭВМ 4 вводятся с клавиатуры 6 значения координат начальной точки. После завершения выставки БИНС 13 подается команда на начало калибровки. Технологическое МТС 1 начинает движение к конечной точке маршрута. На конечной точке в технологическую специализированную ЭВМ 4 вводятся с клавиатуры 6 значения координат конечной точки, по модулю отображения 5 контролируются значения полученных калибровочных коэффициентов и поправок, которые сохраняются в памяти специализированной ЭВМ 4.
1. Выполнение блока контрольных операций по оценке работоспособности СТН производится в следующем порядке:
а) оценка времени подготовки СТН к работе;
б) оценка возможности выполнения работ без выхода расчета из НТС на начальной и привязываемых точках, за исключением работ, проводимых с выносным оборудования для топогеодезических определений, осуществляется в процессе проведения всего комплекса испытаний на ИТ;
в) оценка возможности непрерывной работы СТН до 24 ч без изменения точностных характеристик;
г) оценка возможности сохранения информации о своем местоположении (данные о координатах, высоте, дирекционном угле продольной оси НТС) при санкционированном выключении электропитания в течение - не менее 30 минут;
д) проверка режима работы СТН с цифровыми картами местности:
- подключают систему к технологическим аккумуляторным батареям 10 или к внешнему источнику постоянного тока напряжением от 26,5 до 28,5 В;
- включают специализированную ЭВМ 4 и модуль отображения 5;
- после появления на экране рабочего меню с помощью указателя трекбола клавиатуры 6 выбирают режим «РАБОТА С ЦКМ», далее - задачу «ЗАГРУЗКА КАРТ»;
- при активизации задачи происходит автоматическая запись ЦКМ с устройства загрузки данных 7 в специализированную ЭВМ 4;
- проверка отображения на ЦКМ местоположения НТС, направления его движения и обеспечения смены листов ЦКМ при выходе координат НТС за их границу проводятся во время проведения заездов на испытательной трассе путем контроля отображения на ЦКМ местоположения НТС, направления его движения и обеспечения смены листов ЦКМ;
- для контроля обеспечения определения на ЦКМ координат (X, Y, Н) точек, отмеченных курсором оператора, выбирают задачу «ПРОСМОТР КАРТЫ»;
- при подведении указателя трекбола в виде перекрестия к любому месту на ЦКМ или к НТС в нижней строке окна выводятся координаты данного места или НТС;
- СТН считают выдержавшей контроль, если методика, приведенная выше, обеспечивает установку/удаление ЦКМ, если на ЦКМ отображаются: местоположение НТС, направление его движения и обеспечивается смена листов ЦКМ, если на экране модуля отображения 5 отображаются координаты точки, помеченной оператором на ЦКМ;
е) проверку возможности обеспечения заданных характеристик по назначению в диапазоне географических широт от 70° Северной широты до 70° Южной широты в любое время суток, в любых дорожных условиях, допускающих движение НТС, возможности обеспечения работы СТН на местности с абсолютной высотой до 4000 м над уровнем моря проводят анализом нормативно - технической и конструкторской документации на СТН, анализом условий эксплуатации подобных изделий.
2. Работы по выполнению блока контрольных операций, проводимых при первоначальном ориентировании НТС 1, производятся в следующем порядке:
а) проверка возможности начального ориентирования НТС с помощью средств, входящих в состав СТН;
б) проверка возможности аппаратуры СТН обеспечивать работу с начальными координатами, вводимыми как вручную, так и автоматически, передаваемыми с НАП КНС 14;
в) проверка обеспечения определения координат начальной точки X, Y и высоты Н по карте (с впечатанными координатами) или на геодезической основе с помощью приборов (ручной в специализированную ЭВМ 4).
3. Работы по выполнению блока контрольных операций по определению точностных характеристик СТН производятся в следующем порядке:
а) проверка точности определения приращений плановых координат от пройденного пути при безостановочном движении с использованием информации о скорости от УМДС 16 и ДСД 21;
б) проверка точности определения приращений плановых координат и высоты при безостановочном движении с использованием информации о скорости от УМДС 16 и ДСД 21 и непрерывной коррекцией в движении по сигналам НАП КНС 14 и СОВ 17 проводится в следующей последовательности;
в) оценка точности определения начального дирекционного угла продольной оси НТС 1;
г) оценка точности определения углов тангажа и крена в движении и на стоянке через 1 мин после прекращения движения;
д) оценка точности и времени первоначального определения прямоугольных координат с помощью НАП КНС осуществляется в следующей последовательности:
- разместить НТС 1 над КГ с предельным отклонением ±0,5 м от центра антенн НАП КНС 14;
- подать команду на проведение работ по определению местоположения НТС 1 с помощью аппаратуры НАП КНС 14, включить секундомер;
- при завершении работы выключить секундомер, зафиксировав длительность работы ТКНС и значения координат ХКНС, YКНС, НКНС;
- найти разность значений координат и высоты по данным НАП КНС 14 и их значений для КГ:
ΔX=XKHC-XK; ΔY=YKHC-YK; ΔH=HKHC-HK+HHTC,
где ННТС - превышение антенн НАП КНС 14 относительно высоты контрольной точки;
- провести работы не менее 6 раз;
- рассчитать среднее значение времени определения местоположения НТС 1 с помощью НАП КНС 14;
где TKHCi - время определения местоположения НТС 1 с помощью НАП КНС 14 в i-й реализации;
n - общее количество реализации;
- рассчитать значения средних квадратических отклонений определения координат X, Y и высоты Н с помощью НАП КНС 14 по формулам:
где ΔXi, ΔYi, ΔНi - погрешности измерений НАП КНС в i-й реализации;
n - общее количество реализации.
- СТН считают выдержавшей контроль, если средние квадратические отклонения определения координат X, Y, H и время первоначального определения прямоугольных координат с помощью НАП КНС 14 соответствует паспортным значениям.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа проведения испытаний универсальной системы топопривязки, который определяет комплекс операций по контролю навигационной аппаратуры, выполненной с возможностью размещения на шасси наземных транспортных средств различного типа, включающий в себя работы по контролю технических данных по назначению, тактических и технических характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ размещения и проведения испытаний аппаратуры спутниковой навигации на подвижном объекте | 2018 |
|
RU2680662C1 |
| Способ контроля точностных характеристик системы топопривязки и навигации | 2016 |
|
RU2659614C9 |
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА | 2014 |
|
RU2572407C1 |
| СПОСОБ ПРИМЕНЕНИЯ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2487316C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2012 |
|
RU2498221C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВОЙСКАМИ | 2012 |
|
RU2511207C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБМЕНА ТОПОПРИВЯЗЧИКА | 2012 |
|
RU2498222C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
Изобретение относится к оборонной технике, в частности к методам и средствам проведения испытаний систем топопривязки и навигации, устанавливаемым на шасси наземных транспортных средств. Технический результат - расширение функциональных возможностей. Для этого процесс контроля системы топопривязки и навигации (СТН) разделен на три функциональных блока контрольных операций: блок операций по контролю работоспособности, блок контрольных операций при первоначальном ориентировании, блок контрольных операций по определению точностных характеристик; проводится по результатам прокладки маршрута между контрольными точками, расчета на основе полученных параметров погрешностей и сравнения их с установленными предельными значениями. Для проведения испытаний используется технологическое наземное транспортное средство (МТС), на котором при помощи технологических средств монтируются элементы контролируемых систем, перед контрольными операциями проводят операции по технологической приработке и калибровке СТН. 2 ил.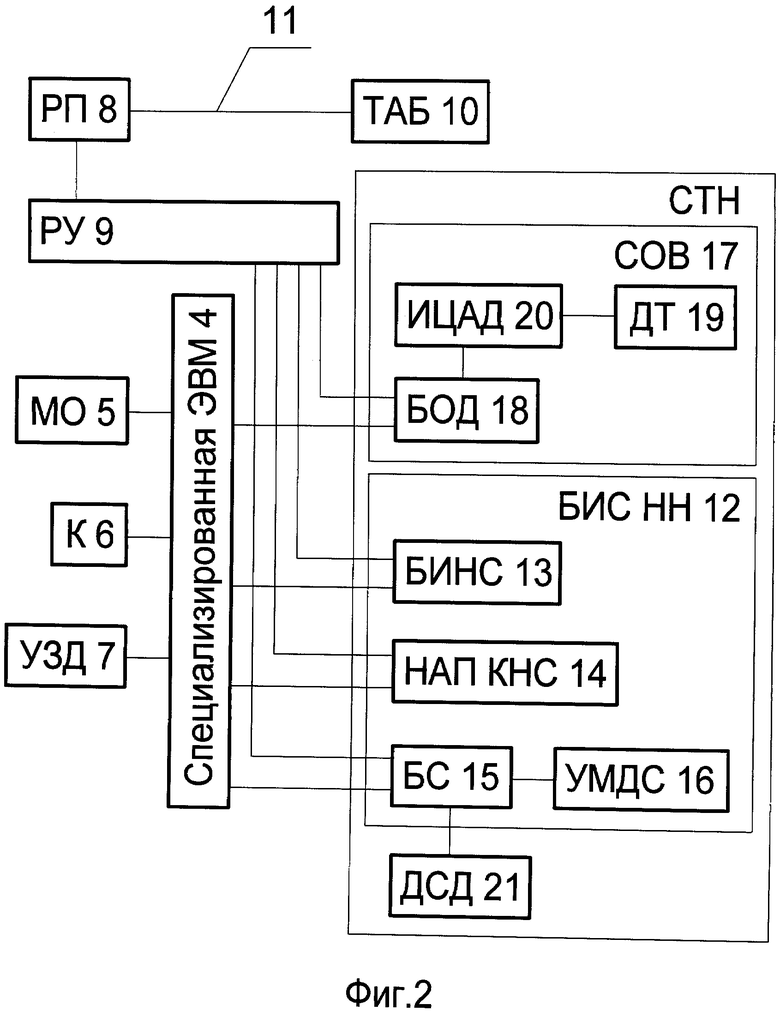
Способ проведения испытаний универсальной системы топопривязки и навигации, заключающийся в том, что процесс контроля системы топопривязки и навигации (СТН) разделен на три функциональных блока контрольных операций: блок операций по контролю работоспособности, блок контрольных операций при первоначальном ориентировании, блок контрольных операций по определению точностных характеристик;
проводится по результатам прокладки маршрута между контрольными точками, расчета на основе полученных параметров средних квадратических погрешностей и сравнения их с установленными предельными значениями, отличающийся тем, что для проведения испытаний используется технологическое наземное транспортное средство (НТС), на котором при помощи технологических средств монтируются элементы контролируемых систем, перед контрольными операциями проводят операции по технологической приработке и калибровке СТН, в блок операций по контролю работоспособности дополнительно введены проверки режима работы СТН с цифровыми картами местности, возможности обеспечения заданных характеристик по назначению в диапазоне географических широт от 70° Северной широты до 70° Южной широты в любое время суток, в любых дорожных условиях, допускающих движение НТС, возможности обеспечения работы СТН на местности с абсолютной высотой до 4000 м над уровнем моря, в блок контрольных операций при первоначальном ориентировании дополнительно введена проверка обеспечения определения координат начальной точки X, Y и высоты Н по карте (с впечатанными координатами) или на геодезической основе с помощью приборов (ручной ввод в бортовой вычислитель), в блок контрольных операций по определению точностных характеристик введена оценка точности и времени первоначального определения прямоугольных координат с помощью навигационной аппаратуры потребителей космических навигационных систем (НАП КНС).
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| Устройство для транспортирования рыбы из невода в лабаз | 1932 |
|
SU32262A1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ПЕРВИЧНОЙ УТИЛИЗАЦИИ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ НА МЕСТАХ ИХ ДИСЛОКАЦИИ | 2005 |
|
RU2309061C2 |
| US 6765499 B2, 20.07.2004 | |||
| US 6816761 B2, 09.11.2004. | |||

