Изобретение относится к оборонной технике, в частности к способам размещения и проведения испытаний систем спутниковой навигации, устанавливаемых на шасси наземных транспортных средств.
Известен способ проведения испытаний универсальной системы топопривязки и навигации (см. патент RU №2490594 С1, опубл. 20.08.13 г., Бюл. №23), принятый за прототип. Способ проведения испытаний универсальной системы топопривязки и навигации заключается в том, что процесс контроля системы топопривязки и навигации (СТН) разделен на три функциональных блока контрольных операций: блок операций по контролю работоспособности, блок контрольных операций при первоначальном ориентировании, блок контрольных операций по определению точностных характеристик и проводится по результатам прокладки маршрута между контрольными точками, расчета на основе полученных параметров средних квадратических погрешностей и сравнения их с установленными предельными значениями. Для проведения испытаний используется технологическое наземное транспортное средство (НТС), на котором при помощи технологических средств монтируются элементы контролируемых систем, перед контрольными операциями проводят операции по технологической приработке и калибровке СТН, в блок операций по контролю работоспособности дополнительно введены проверки режима работы СТН с цифровыми картами местности, возможности обеспечения заданных характеристик по назначению в диапазоне географических широт от 70° Северной широты до 70° Южной широты в любое время суток, в любых дорожных условиях, допускающих движение НТС, возможности обеспечения работы СТН на местности с абсолютной высотой до 4000 м над уровнем моря, в блок контрольных операций при первоначальном ориентировании дополнительно введена проверка обеспечения определения координат начальной точки X, Y и высоты Н по карте (с впечатанными координатами) или на геодезической основе с помощью приборов (ручной ввод в бортовой вычислитель), в блок контрольных операций по определению точностных характеристик введена оценка точности и времени первоначального определения прямоугольных координат с помощью навигационной аппаратуры потребителей космических навигационных систем (НАП КНС).
Недостатками прототипа являются:
- отсутствие оценки совместимости аппаратуры со штатными радиоэлектронными средствами объекта военной техники;
- отсутствие возможности оперативного анализа результатов, полученных в ходе испытаний;
- необходимость комплектования технологического транспортного средства;
- высокие затраты на проведение испытаний.
Предлагаемым изобретением решается задача по оптимальному размещению и проведению испытаний образца спутниковой навигационной аппаратуры в составе действующего объекта военной техники.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа размещения и проведения испытаний аппаратуры спутниковой навигации на подвижном объекте, который определяет размещение угломерной навигационной аппаратуры потребителя и автоматизированного рабочего места для обеспечения ее настройки и обслуживания на подвижном объекте, возможность использования аппаратуры в составе объекта размещения, оценку соответствия полученных результатов заданным требованиям при размещении на реальном объекте.
Указанный технический результат достигается тем, что в предлагаемом способе размещения и проведения испытаний аппаратуры спутниковой навигации на подвижном объекте, заключающемся в том, что для контроля используется наземное транспортное средство, на котором при помощи технологических средств монтируются элементы контролируемых систем, перед контрольными операциями проводят операции по технологической приработке и калибровке, процесс контроля разделен на функциональные блоки контрольных операций, в том числе на блок операций по контролю работоспособности и блок контрольных операций по определению точностных характеристик, новым является то, что в качестве технологического наземного транспортного средства используется полностью укомплектованный топопривязчик на базе транспортного средства повышенной проходимости с кузовом-фургоном, на топопривязчике дополнительно размещается спутниковая угломерная навигационная аппаратура (СУНА) и автоматизированное рабочее место (АРМ) для обеспечения ее настройки и обслуживания, размещение антенных модулей СУНА производится с использованием технологического основания, обеспечивающего крепление модулей в требуемой конфигурации для получения минимально возможного затенения радиовидимости и исключения попадания на антенные модули отраженных сигналов, для чего технологическое основание установлено на монтажной плите, жестко закрепленной на крыше кузова-фургона, что позволяет получить необходимую ориентацию антенных модулей относительно продольной оси топопривязчика, размещение блока угловых измерений СУНА производится в кузове-фургоне с обеспечением ориентации его строительных осей относительно осей инерциальной навигационной системы (ИНС) из состава топопривязчика с погрешностью, не превышающей заданную, для чего плита под установку ИНС снабжена площадкой под размещение блока угловых измерений и установку оптических квадрантов, размещение АРМ и приемо-вычислительного блока СУНА производится в кузове-фургоне на платформе, закрепленной на столе рабочего места оператора топопривязчика, для чего платформа выполнена в виде прямоугольной плиты с жестко установленной на ней наклонной стойкой, расположенной под углом к боковым поверхностям плиты, блок контрольных операций по контролю работоспособности включает проверку функционирования СУНА и АРМ в составе топопривязчика: подтверждение работоспособности в части определения навигационных параметров, взаимодействие СУНА с АРМ, отображение и протоколирование АРМ результатов измерений, проверку электромагнитной совместимости аппаратуры со штатными радиоэлектронными средствами топопривязчика.
Использование в качестве наземного транспортного средства полностью укомплектованного топопривязчика на базе транспортного средства повышенной проходимости с кузовом-фургоном позволяет:
- обеспечить размещение и закрепление аппаратуры СУНА и АРМ в условиях максимально приближенных к условиям реальной эксплуатации;
- использовать оборудованные рабочие места для испытателей.
Дополнительное размещение на топопривязчике СУНА и АРМ для обеспечения ее настройки и обслуживания позволяет:
- обеспечить проведение испытаний аппаратуры спутниковой навигации на реальном объекте военной техники;
- обеспечить проведение сравнительного анализа результатов испытаний дополнительно размещенной аппаратуры спутниковой навигации и штатной спутниковой аппаратуры топопривязчика;
- снизить затраты на проведение испытаний.
Размещение антенных модулей СУНА с использованием технологического основания позволяет:
- использовать технологическое основание в качестве объединяющего антенные модули конструктивного элемента;
- минимизировать при размещении объем доработок кузова-фургона топопривязчика;
- обеспечить крепление антенных модулей в требуемой конфигурации для получения минимально возможного затенения радиовидимости и исключения попадания на антенные модули отраженных сигналов.
Установка технологического основания на монтажной плите, жестко закрепленной на крыше кузова-фургона, позволяет:
- обеспечить жесткое крепление антенной системе на объекте размещения;
- обеспечить необходимую ориентацию технологического основания относительно продольной оси топопривязчика.
Размещение блока угловых измерений в кузове-фургоне с обеспечением ориентации его строительных осей относительно осей инерциальной навигационной системы из состава топопривязчика с погрешностью, не превышающей заданную, позволяет:
- встроить СУНА в навигационную систему топопривязчика;
- повысить точность навигационных определений аппаратуры в условиях использования на реальном объекте.
Оснащение плиты под установку ИНС топопривязчика площадкой под размещение блока угловых измерений и установку оптических квадрантов позволяет:
- обеспечить размещение приборного состава и измерительных устройств;
- определять действительные углы пространственной ориентации, координаты и высоту стояния объекта размещения, погрешности их определения.
Размещение АРМ и приемо-вычислительного блока СУНА в кузове-фургоне на платформе, закрепленной на столе рабочего места оператора топопривязчика, позволяет:
- обеспечить на приемо-вычислительном блоке свободный доступ к разъемам для подключения кабелей питания, кабелей к антенным модулям, блоку угловых измерений, ПЭВМ;
- обеспечить необходимые условия для работы оператора при настройке СУНА, при считывании с экрана ПЭВМ результатов, зафиксированных в процессе испытаний.
Выполнение платформы в виде прямоугольной плиты с жестко установленной на ней наклонной стойкой, расположенной под углом к боковым поверхностям плиты, позволяет:
- разместить с возможностью изменения местоположения АРМ на штатном столе оператора;
- обеспечить быстрый монтаж/демонтаж АРМ;
- обеспечить сохранность оборудования топопривязчика.
Включение в блок контрольных операций по контролю работоспособности проверки функционирования СУНА и АРМ в составе топопривязчика позволяет:
- подтвердить работоспособность в части определения навигационных параметров, взаимодействия СУНА с АРМ, отображения и протоколирование АРМ результатов измерений;
- проанализировать вопросы встраивания СУНА в существующие навигационные системы и использование ее в новых системах.
Включение в блок контрольных операций по контролю работоспособности проверки электромагнитной совместимости аппаратуры со штатными радиоэлектронными средствами топопривязчика позволяет подтвердить работоспособность в части отсутствия ухудшения приема спутниковых сигналов, сохранения работоспособности при работе штатных радиоэлектронных средств топопривязчика.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
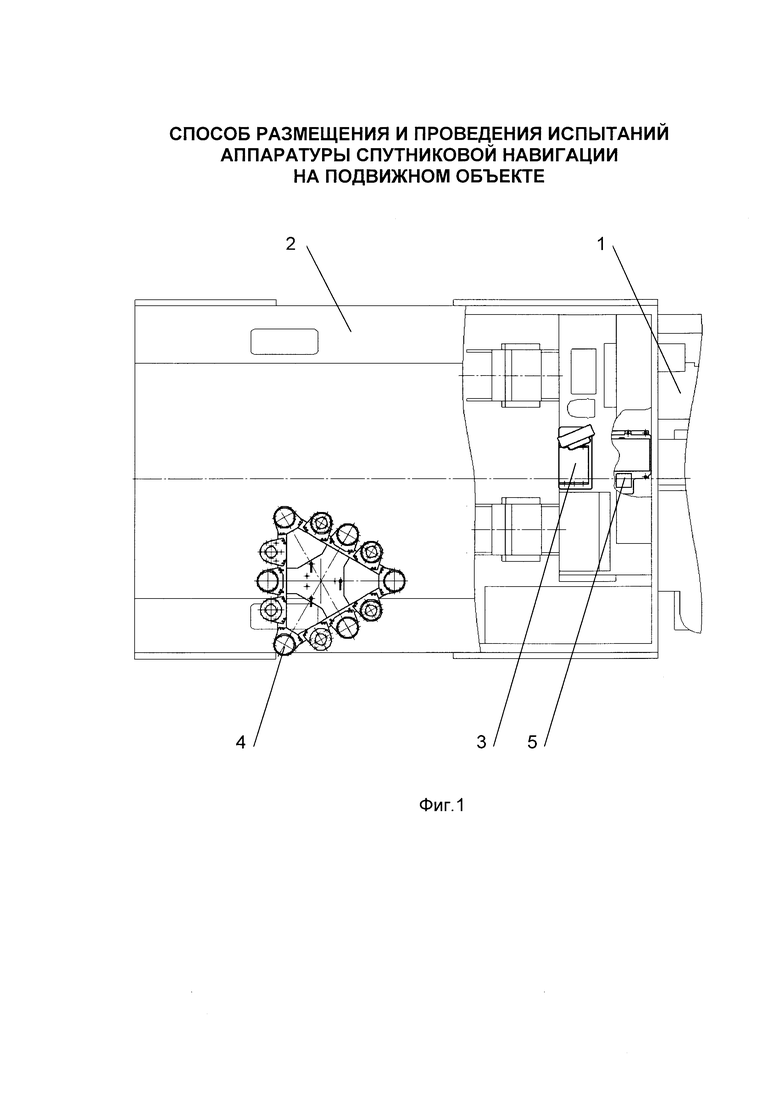
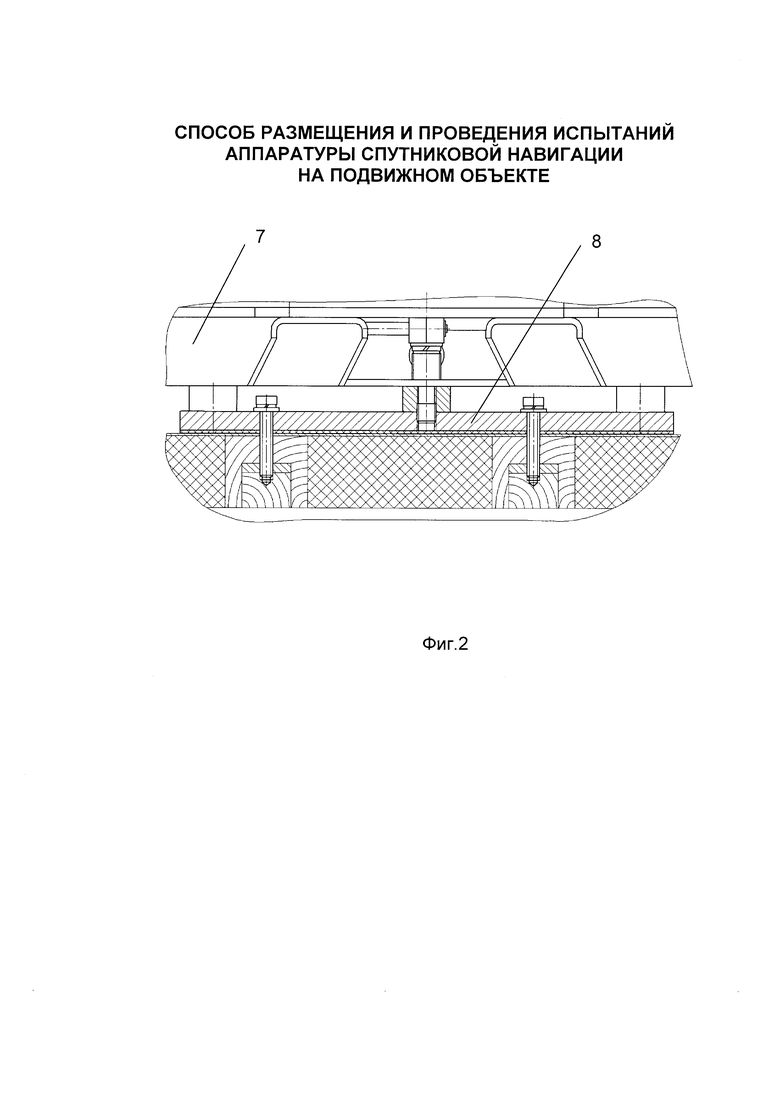
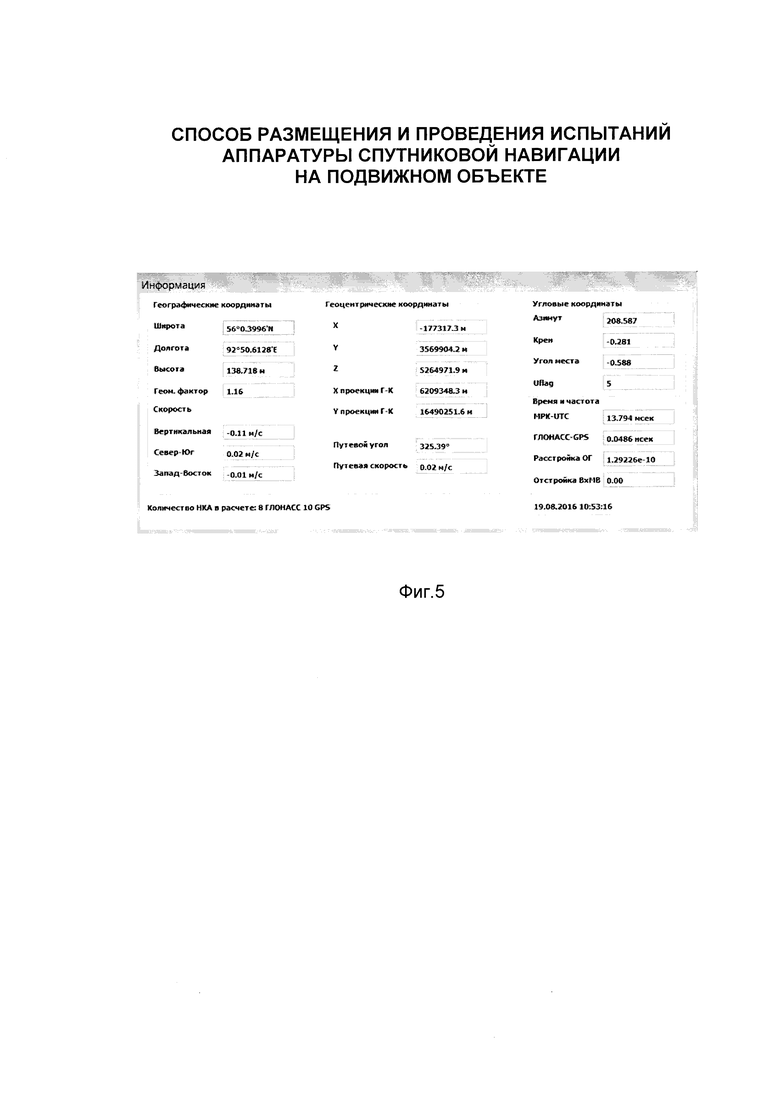
Сущность изобретения поясняется чертежами, где на фиг. 1 показан топопривязчик, вид сверху; на фиг. 2 - установка антенной системы; на фиг. 3-установка ИНС топопривязчика и БУИ; на фиг. 4 - установка ПЭВМ и ПВБ; на фиг. 5 - информационное окно АРМ.
Способ размещения и проведения испытаний аппаратуры спутниковой навигации на подвижном объекте осуществляется следующим образом. Для отработки и проведения испытаний спутниковая угломерная навигационной аппаратуры (СУНА) для средств обеспечения, разведки и АСУВ и автоматизированное рабочее место (АРМ) для обеспечения настройки и обслуживания размещаются на полностью укомплектованном топопривязчике (ТП), выполненном на базе транспортного средства повышенной проходимости 1 с кузовом-фургоном 2. В состав СУНА входят: приемо-вычислительный блок (ПВБ) 3, антенные модули (AM) 4, блок угловых измерений (БУИ) 5. Основой АРМ является ПЭВМ 6. Размещение СУНА для отработки и испытаний предусматривает монтаж на топопривязчике шести AM 4, БУИ 5 и ПВБ 3, подключение ПВБ 3 к бортовой электросети постоянного тока, установку АРМ с обеспечением его подключения к ПВБ 3 для настройки и контроля состояния СУНА, а также фиксации результатов работы в процессе испытаний. Размещение AM 4 производится на крыше кузова-фургона 2 с использованием технологического основания 7, обеспечивающего крепление AM 4 в требуемой конфигурации. Крепление технологического основания 7 на крыше реализуется с использованием монтажной плиты 8. Размещение технологического основания 7 на крыше кузова-фургона 2 реализовано таким образом, чтобы обеспечить для AM 4 минимально возможные затенения радиовидимости навигационных космических аппаратов в верхней полусфере пространства со всех направлений по азимуту, а также, по-возможности, исключить попадание на AM 4 сигналов, отраженных от элементов конструкции ТП. Размещение БУИ 5 обеспечивает ориентацию его строительных осей относительно осей инерциальной навигационной системы (ИНС) 9 из состава топопривязчика с погрешностью не более 1 градуса, а также неизменность положения строительных осей БУИ 5 относительно строительных осей топопривязчика после установки, для чего плита 10 под установку ИНС 9 снабжена площадкой 11 под размещение БУИ 5 и установку оптических квадрантов для замера углов крена и тангажа при испытаниях. Размещение ПЭВМ 6 АРМ и ПВБ 3 производится в кузове-фургоне 2 на платформе, закрепленной на столе 12 рабочего места оператора ТП, для чего платформа выполнена в виде прямоугольной плиты 13 с жестко установленной на ней наклонной стойкой 14, расположенной под углом к боковым поверхностям плиты 13. Такое размещение ПВБ 3 обеспечивает доступ к его разъемам для подключения кабелей питания, кабелей к AM 4, БУИ 5, ПЭВМ 6. Размещение ПЭВМ 6 обеспечивает необходимые условия для работы оператора при настройке СУНА, а также при считывании с экрана ПЭВМ 6 результатов, зафиксированных в процессе испытаний.
При испытаниях проводится отработка использования СУНА в составе топопривязчика, оценка соответствия СУНА заданным требованиям при размещении и использовании на реальном объекте. Соответствие СУНА заданным требованиям проверяется точностью совпадения координат и углов пространственной ориентации объекта, полученных с ее использованием, с их действительными значениями, полученными независимыми измерениями.
Проверка функционирования СУНА и АРМ в составе топопривязчика.
СУНА и АРМ устанавливаются в ТП в соответствии с принятой схемой размещения. После подачи питания производится включение аппаратных средств и запуск специального программного обеспечения, проводится самодиагностика изделия. После установления соединения СУНА с АРМ должно автоматически открывается информационное окно. В окне «Информация» содержатся результаты определения навигационных параметров. Проверка считается успешной, если после включения СУНА и АРМ по истечении интервала времени 3 минуты в окне «Информация» отображаются рассчитанные значения географических координат (широта, долгота, высота) и значения составляющих вектора скорости (вертикальная, север-юг, запад-восток), определенные с заданной погрешностью.
Проверка электромагнитной совместимости СУНА и АРМ со штатными радиоэлектронными средствами ТП.
Штатные радиоэлектронные средства топопривязчика отключаются, подается питание на СУНА и АРМ, производится в АРМ запуск специального программного обеспечения и выполняется проверка функционирования аппаратуры в составе ТП. При этом убеждаются в отсутствии выдачи сообщений об обнаруженных сбоях и ошибках. Далее осуществляется поочередное включение штатных приборов из состава ТП. При включении каждого радиоэлектронного средства контролируется информация о приеме сигналов со спутников, определении навигационных параметров и углов пространственной ориентации.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа размещения и проведения испытаний аппаратуры спутниковой навигации на подвижном объекте, который определяет размещение угломерной навигационной аппаратуры потребителя и автоматизированного рабочего места для обеспечения ее настройки и обслуживания на подвижном объекте, возможность использования аппаратуры в составе объекта размещения, оценку соответствия полученных результатов заданным требованиям при размещении на реальном объекте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированное рабочее место для обучения расчета топопривязчика | 2017 |
|
RU2659869C1 |
| ТОПОПРИВЯЗЧИК | 2010 |
|
RU2434762C1 |
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА | 2014 |
|
RU2572407C1 |
| УСТАНОВОЧНЫЙ КОМПЛЕКТ ДЛЯ КРЕПЛЕНИЯ ОБОРУДОВАНИЯ НА НАРУЖНЫХ ПОВЕРХНОСТЯХ КУЗОВА-ФУРГОНА ТОПОПРИВЯЗЧИКА | 2012 |
|
RU2507091C1 |
| СИСТЕМА СВЯЗИ И ПЕРЕДАЧИ ДАННЫХ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2453994C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ И КОМПЛЕКТ СРЕДСТВ ДЛЯ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2490594C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| КОМПЛЕКС СРЕДСТВ ВИДЕОНАБЛЮДЕНИЯ И СВЯЗИ МОБИЛЬНОГО ПУНКТА УПРАВЛЕНИЯ | 2011 |
|
RU2468522C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В РЕЖИМЕ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ | 2012 |
|
RU2498223C1 |
| СПОСОБ АНАЛИЗА КАЧЕСТВА ФОРМИРОВАНИЯ И ПЕРЕДАЧИ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК ПО ЗАПРОСУ ОТ ТОПОПРИВЯЗЧИКА ПОТРЕБИТЕЛЮ | 2015 |
|
RU2601614C1 |


Изобретение относится к области навигационного приборостроения и может найти применение для размещения и проведения испытаний систем спутниковой навигации, устанавливаемых на шасси наземных транспортных средств. Технический результат – расширение функциональных возможностей. Для этого предлагаемый способ заключается в том, что для контроля используется наземное транспортное средство, на котором при помощи технологических средств монтируются элементы контролируемых систем, перед контрольными операциями проводят операции по технологической приработке и калибровке, процесс контроля разделен на функциональные блоки контрольных операций, в том числе на блок операций по контролю работоспособности и блок контрольных операций по определению точностных характеристик. В качестве технологического наземного транспортного средства используется полностью укомплектованный топопривязчик на базе транспортного средства повышенной проходимости с кузовом-фургоном, на топопривязчике дополнительно размещается спутниковая угломерная навигационная аппаратура (СУНА) и автоматизированное рабочее место (АРМ) для обеспечения ее настройки и обслуживания, размещение антенных модулей СУНА производится с использованием технологического основания, обеспечивающего крепление модулей в требуемой конфигурации для получения минимально возможного затенения радиовидимости и исключения попадания на антенные модули отраженных сигналов, для чего технологическое основание установлено на монтажной плите, жестко закрепленной на крыше кузова-фургона, что позволяет получить необходимую ориентацию антенных модулей относительно продольной оси топопривязчика, размещение блока угловых измерений СУНА производится в кузове-фургоне с обеспечением ориентации его строительных осей относительно осей инерциальной навигационной системы (ИНС) из состава топопривязчика с погрешностью, не превышающей заданную, для чего плита под установку ИНС снабжена площадкой под размещение блока угловых измерений и установку оптических квадрантов, размещение АРМ и приемо-вычислительного блока СУНА производится в кузове-фургоне на платформе, закрепленной на столе рабочего места оператора топопривязчика. При этом платформа выполнена в виде прямоугольной плиты с жестко установленной на ней наклонной стойкой, расположенной под углом к боковым поверхностям плиты, блок контрольных операций по контролю работоспособности включает проверку функционирования СУНА и АРМ в составе топопривязчика, обеспечивая определение навигационных параметров, взаимодействие СУНА с АРМ, отображение и протоколирование АРМ результатов измерений, проверку электромагнитной совместимости аппаратуры со штатными радиоэлектронными средствами топопривязчика. При этом в процессе формирования способа обеспечивается возможность использования аппаратуры в составе объекта размещения и оценка соответствия полученных результатов заданным требованиям при размещении на реальном объекте. 5 ил.
Способ размещения и проведения испытаний аппаратуры спутниковой навигации на подвижном объекте, заключающийся в том, что для контроля используется наземное транспортное средство, на котором при помощи технологических средств монтируются элементы контролируемых систем, перед контрольными операциями проводят операции по технологической приработке и калибровке, процесс контроля разделен на функциональные блоки контрольных операций, в том числе на блок операций по контролю работоспособности и блок контрольных операций по определению точностных характеристик, отличающийся тем, что в качестве технологического наземного транспортного средства используется полностью укомплектованный топопривязчик на базе транспортного средства повышенной проходимости с кузовом-фургоном, на топопривязчике дополнительно размещается спутниковая угломерная навигационная аппаратура (СУНА) и автоматизированное рабочее место (АРМ) для обеспечения ее настройки и обслуживания, размещение антенных модулей СУНА производится с использованием технологического основания, обеспечивающего крепление модулей в требуемой конфигурации для получения минимально возможного затенения радиовидимости и исключения попадания на антенные модули отраженных сигналов, для чего технологическое основание установлено на монтажной плите, жестко закрепленной на крыше кузова-фургона, что позволяет получить необходимую ориентацию антенных модулей относительно продольной оси топопривязчика, размещение блока угловых измерений СУНА производится в кузове-фургоне с обеспечением ориентации его строительных осей относительно осей инерциальной навигационной системы (ИНС) из состава топопривязчика с погрешностью, не превышающей заданную, для чего плита под установку ИНС снабжена площадкой под размещение блока угловых измерений и установку оптических квадрантов, размещение АРМ и приемо-вычислительного блока СУНА производится в кузове-фургоне на платформе, закрепленной на столе рабочего места оператора топопривязчика, для чего платформа выполнена в виде прямоугольной плиты с жестко установленной на ней наклонной стойкой, расположенной под углом к боковым поверхностям плиты, блок контрольных операций по контролю работоспособности включает проверку функционирования СУНА и АРМ в составе топопривязчика: подтверждение работоспособности в части определения навигационных параметров, взаимодействие СУНА с АРМ, отображение и протоколирование АРМ результатов измерений, проверку электромагнитной совместимости аппаратуры со штатными радиоэлектронными средствами топопривязчика.
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ И КОМПЛЕКТ СРЕДСТВ ДЛЯ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2490594C1 |
| ВИСЯЧИЙ ЗАМОК | 1947 |
|
SU78338A1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| US 6765499 B2, 20.07.2004 | |||
| Способ многоканальной регистрации результатов измерений и устройство для его осуществления | 1990 |
|
SU1747905A1 |

