Изобретение относится к военной технике, а именно к способам функционирования мобильных комплексов навигации и топопривязки в условиях боевого применения, и может быть использовано для решения задач топогеодезической подготовки боевых действий ракетных войск и артиллерии Сухопутных войск.
Известен «Учебник сержанта ракетных войск и артиллерии Сухопутных войск» для командиров топогеодезических отделений и топопривязчиков, книга 4, утвержденный командующим ракетными войсками и артиллерией Сухопутных войск./ Под редакцией В.В.Бурова. - М.: Воениздат, 1975 г., стр.3-24, стр.56-84).
В учебнике изложены основы (способ) боевого применения топогеодезических подразделений и машин топопривязки, принятый за прототип. Топопривязчики предназначены для выполнения топогеодезической привязки стартовых и огневых позиций, пунктов, постов и позиций средств артиллерийской разведки, для вождения колонн войск ночью и в других условиях, затрудненных для ориентирования, нанесения на карту не обозначенных на карте дорог и для передачи дирекционных углов ориентирных направлений.
Топопривязчик автоматически определяет координаты точек местности при помощи навигационной аппаратуры, принцип работы которой заключается в непрерывном вырабатывании приращений координат и суммировании их с координатами предыдущей точки. Эта задача решается с помощью специального счетно-решающего устройства (курсопрокладчика). Для получения текущих координат точек маршрута от системы подачи пути (датчика пути) в счетно-решающее устройство поступают данные об отрезках пути ΔS, пройденных машиной, а выработка дирекционного угла α направления продольной оси машины в каждой точке маршрута обеспечивается курсоуказателем. Кроме того, в состав топопривязчика входят визир ориентирования, источники питания, приборы электрооборудования, гирокомпас, выносные топогеодезические приборы и радиостанция.
Функционирование топопривязчика может осуществляться в условиях заблаговременной подготовки районов развертывания артиллерии или при развертывании подразделений с марша в неподготовленном районе. Одним из основных принципов топогеодезической привязки является проведение привязки в порядке последовательного повышения ее точности. Это означает, что в любых условиях обстановки огневые и разведывательные подразделения производят топогеодезическую привязку своими силами и средствами немедленно с их развертыванием. Результаты этой привязки они используют до получения более точных данных от топогеодезических подразделений (топопривязчиков). Данные, полученные топопривязчиком, используются подразделениями огневых средств, звуковой разведки, радиотехнической разведки, мобильными радиолокационными подразделениями.
При выполнении задач расчетом топопривязчика в условиях наступления осуществляется привязка, и контроль привязки обслуживаемых подразделений, и определение изменения поправки буссоли. Кроме того, может быть поставлена задача на организацию астрономического поста и передачу ориентирования, на подачу начальных точек в районы развертывания позиций, а также на вождение колонн войск по заданному маршруту. Результаты топогеодезической привязки оформляются в виде списка координат и ориентирных направлений или в виде карточки ориентирных направлений и непосредственно или при помощи радиостанции передаются в подразделения.
В обороне расчет топопривязчика проводит те же работы, что и при наступлении, и кроме того, обеспечивает создание специальной топогеодезической сети в районе развертывания ракетных войск и артиллерии. В обороне объем работ увеличивается ввиду того, что привязка производится как на основных, так и на запасных рубежах (районах) развертывания.
Для ориентирования топопривязчика, обладающего определенным комплексом аппаратных средств, в соответствии с прототипом необходимо:
- установить топопривязчик на начальную точку так, чтобы вертикальная ось визирующего прибора находилась над ней;
- навести визир на ориентир и снять отсчет βВИЗ;
- вычислить дирекционный угол αОСИ продольной оси топопривязчика (в соответствии с фиг.1):
αОСИ=αОР-βВИЗ;
- если αОР<βВИЗ, то дирекционный угол αОСИ продольной оси топопривязчика равен (в соответствии с фиг.2):
αОСИ=(αOP+60-00)-βВИЗ.
Координаты начальной точки снимаются с карты или выбираются из каталогов (списков) координат, если начальной точкой является пункт опорной геодезической сети.
Если установить топопривязчик на начальной точке невозможно, то для определения дирекционного угла оси необходимо использовать буссоль.
Данному способу ориентирования топопривязчика на начальной точке присущ ряд существенных недостатков, основным из которых является высокая погрешность определения топогеодезических параметров. Кроме того, для определения параметров начальной точки в большинстве случаев возникает необходимость использования выносных приборов.
Таким образом, способ функционирования расчета топопривязчика в боевых условиях при данном уровне технических средств включает в себя следующие этапы:
- подготовку топопривязчика к выполнению боевой (учебной) задачи;
- проведение ориентирования топопривязчика на начальной точке - определение дирекционного угла машины и координат начальной точки;
а) определение координат начальной точки производится по карте или по каталогам (спискам) координат, если начальной точкой является пункт опорной геодезической сети;
б) для определения дирекционного угла продольной оси машины в исходном положении используется ориентирное направление, дирекционный угол которого известен (выбран из каталога или списка координат), или направление, дирекционный угол которого определяется одновременно с ориентированием топопривязчика с помощью магнитной стрелки буссоли;
- перемещение топопривязчика к конечной (привязываемой) точке, нанесение маршрута движения и дополнительных ориентиров на топографическую карту;
- занесение (архивирование) полученных на привязываемых точках топогеодезических данных в полевой журнал;
- определение погрешности координат места топопривязчика, вычисляемой как разница между значениями координат конечной (привязываемой) точки, определенными топопривязчиком и снятыми с топографической карты;
- при расхождении в координатах в конечной точке выше допустимых норм повторение привязки с использованием этой или другой точки в качестве начальной;
- после завершения топогеодезической привязки контрольных точек проведение топогеодезической привязки ориентиров на местности и огневых позиций орудий или ракетных установок;
- доклад командованию и передача результатов привязки обслуживаемым подразделениям.
Недостатками способа функционирования расчета топопривязчика в боевых условиях, взятого за прототип, являются:
- необходимость наличия разветвленной топогеодезической сети для проведения качественной топогеодезической привязки;
- высокая погрешность при определении навигационных параметров, напрямую зависящая от пройденного топопривязчиком пути и погрешности начального ориентирования, которое к тому же занимает большое количество времени;
- необходимость использования большого количества топогеодезических расчетов для боевого обеспечения крупных подразделений войск;
- необходимость проведения большого количества контрольных замеров для обеспечения требуемой точности;
- низкий уровень технических средств, применяемых в топопривязчике;
- высокий уровень влияния различных факторов на точность определяемых параметров (человеческий фактор, геометрическая точность карты, погодные условия, вид местности и т.п.);
- сложная технология и низкая степень автоматизации выполнения топогеодезических измерений, приводящая к высокому уровню погрешностей и временных затрат;
- недостаточная площадь информационного обеспечения (покрытия) полученной информацией;
- большое количество ручных расчетов при решении стандартных топогеодезических задач;
- низкая степень готовности топопривязчика;
- низкий уровень возможностей по передаче полученных данных по радиоканалу обслуживаемым подразделениям;
- низкая степень управляемости и слаженности при взаимодействии с потребителями топогеодезической информации;
- исходя из вышеизложенного, недоостаточный уровень топогеодезического обеспечения, как одного из видов обеспечения войск, не соответствующий современным требованиям.
Предлагаемым изобретением решается задача по повышению эффективности топогеодезического обеспечения Сухопутных войск.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа функционирования мобильного комплекса навигации и топопривязки, оснащенного современными аппаратными средствами, в условиях боевого применения, определяющего оптимальный алгоритм его функционирования и обеспечивающего с высокой степенью автоматизации выполнение комплекса мероприятий по топогеодезической подготовке элементов боевых порядков войск, передачу и распределение полученной информации по назначению.
Указанный технический результат достигается тем, что в предлагаемом способе функционирования мобильного комплекса навигации и топопривязки (МКНТ) в условиях боевого применения, включающем в себя выполнение операции подготовки к выполнению боевой (учебной) задачи, проведение ориентирования на начальной точке - определение дирекционного угла и координат начальной точки, архивирование полученных на привязываемых точках топогеодезических данных, перемещение к конечной (привязываемой) точке, нанесение маршрута движения и дополнительных ориентиров на топографическую карту, определение погрешности координат конечной (привязываемой) точки, проведение топогеодезической привязки ориентиров на местности и огневых позиций орудий или ракетных установок, доклад командованию и передачу результатов привязки обслуживаемым подразделениям, новым является то, что подготовка МКНТ к выполнению боевой (учебной) задачи после выполнения стандартных операций по включению аппаратуры заключается в приведении навигационной аппаратуры МКНТ, неподвижно установленного на начальной точке, в автоматизированный режим «Навигация», проведение ориентирования МКНТ на начальной точке заключается в выборе первой задачи режима навигации - задачи «Начальная установка», в ходе которой определяются используемые источники навигационной информации об азимуте α и начальных значениях координат X, Y, Н: инерциальная навигационная система (ИНС) или аппаратура спутниковой навигации (АСН), или обобщенные данные от совместного использования ИНС и АСН, или данные, определенные с помощью автономных приборов, архивирование топогеодезических данных в процессе работы МКНТ производится автоматически в виде электронных каталогов (списков), перемещение МКНТ к конечной (привязываемой) точке осуществляется после выполнения предыдущей задачи и появления оперативного сообщения о готовности к выполнению второй задачи режима навигации -задачи «Работа» на маршруте, при выполнении второй задачи навигации в реальном режиме времени на цифровой карте местности (ЦКМ) автоматически отображаются значения текущих навигационных параметров и данные местоположения МКНТ, после перехода комплекса к выполнению второй задачи навигации осуществляется параллельное выполнение следующего автоматизированного режима работы комплекса - режима «Работа с ЦКМ», основной задачей которого является задача «Прокладка маршрута», которая выполняется при помощи активизации одной из трех подзадач: «Выбор маршрута по текущим координатам», «Выбор маршрута по вводимым координатам», «Выбор маршрута из списка» - предварительно подготовленного электронного каталога (списка) навигационных данных, определение погрешности азимута и координат места МКНТ осуществляется автоматически за счет интегрированной обработки навигационной информации, поступающей от ИНС и АСН, передача результатов привязки производится по автоматизированному каналу информационного обмена системы связи и передачи данных (ССПД) с пунктами управления вышестоящих и взаимодействующих формирований с учетом приоритетов абонентов как во время движения по маршруту, так и на остановке на привязываемых точках, по завершении топогеодезической привязки непосредственно на МКНТ выполняется печатное изготовление необходимого количества топографических карт с нанесенной на них топогеодезической информацией.
Приведение навигационной аппаратуры МКНТ, неподвижно установленного на начальной точке, в автоматизированный режим «Навигация» позволяет:
- провести инициализацию всего комплекса автоматизированных средств навигации и обработки данных;
- осуществить самотестирование составных частей комплекса.
Алгоритм проведения ориентирования топопривязчика на начальной точке, осуществляемый при выборе первой задачи режима навигации - задачи «Начальная установка», позволяет:
- выбрать используемые источники азимута α продольной оси МКНТ и ввода начальных значений координат X, Y, Н;
- не покидая внутреннего пространства мобильного комплекса, оперативно провести его качественное начальное ориентирование;
- при известных координатах начальной точки автоматически выполнить решение обратной топогеодезической задачи.
Автоматическое архивирование топогеодезических данных в процессе работы МКНТ в виде электронных каталогов (списков) позволяет:
- исключить время на ручное составление и архивирование получаемых топогеодезических данных;
- обеспечить автоматическое составление подробных электронных каталогов большого объема координат геодезических точек (специальных геодезических сетей).
Переход, после появления оперативного сообщения о готовности к выполнению второй задачи режима навигации - задачи «Работа» на маршруте, позволяет:
- в реальном режиме времени автоматически отображать значения текущих навигационных параметров и данных местоположения мобильного комплекса на цифровой карте местности;
- автоматически решать прямую и обратную геодезические задачи;
- при необходимости наносить дополнительные ориентиры и особые условия состояния маршрута.
Выполнение автоматизированного режима работы комплекса - режима «Работа с ЦКМ» позволяет:
- просматривать каталог установленных в навигационной системе цифровых карт местности;
- проводить автоматическое изменение масштаба ЦКМ;
- реализовать автоматизированный процесс прокладки маршрута различными способами;
- производить просмотр, удаление или редактирование проложенного на ЦКМ маршрута.
Автоматическое определение погрешности азимута и координат места МКНТ за счет интегрированной обработки навигационной информации, поступающей от ИНС и АСН, позволяет:
- снизить время на проведение контрольных операций по определению качества топогеодезической информации;
- снизить влияние субъективных причин на качество получаемой информации;
- повысить точность определяемых топогеодезических параметров.
Передача результатов привязки по автоматизированному каналу информационного обмена системы связи и передачи данных (ССПД) с пунктами управления вышестоящих и взаимодействующих формирований с учетом приоритетов абонентов как во время движения по маршруту, так и на остановке на привязываемых точках, позволяет:
- осуществлять автоматизированное ведение адаптивной адресной связи и связи на фиксированных частотах в коротковолновом диапазоне частот;
- осуществлять автоматическое управление всеми видами и режимами работ по передаче данных;
- повысить оперативность доведения топогеодезических данных до подразделений войск;
- обеспечить необходимые дальности связи в движении мобильного комплекса и на стоянке.
Осуществления учета приоритетов абонентов, работающих в сети автоматизированного канала информационного обмена ССПД, позволяет:
- обеспечить упорядоченный обмен информационными потоками;
- обеспечить своевременное доведение до подчиненных команд, сигналов, сообщений установленных категорий срочности, получение докладов, донесений о выполнении поставленных задач, обмен навигационными данными и предоставление каналов связи для ведения телефонных переговоров.
Выполнение по завершении топогеодезической привязки непосредственно на МКНТ печатного изготовления необходимого количества топографических карт с нанесенной на них топогеодезической информацией, позволяет:
- оперативно обеспечить доведение достоверных топографических карт, планов городов с отмеченными контрольными точками и углами ориентирных направлений до подразделений войск;
- обеспечить своевременное обновление топографических карт;
- создать необходимый их запас и своевременное его пополнение;
- исключить необходимость организации специализированного пункта, предназначенного для копирования топографических карт;
- выполнять карты в том масштабе, который обеспечивает решение войсковыми частями поставленных перед ними боевых задач.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
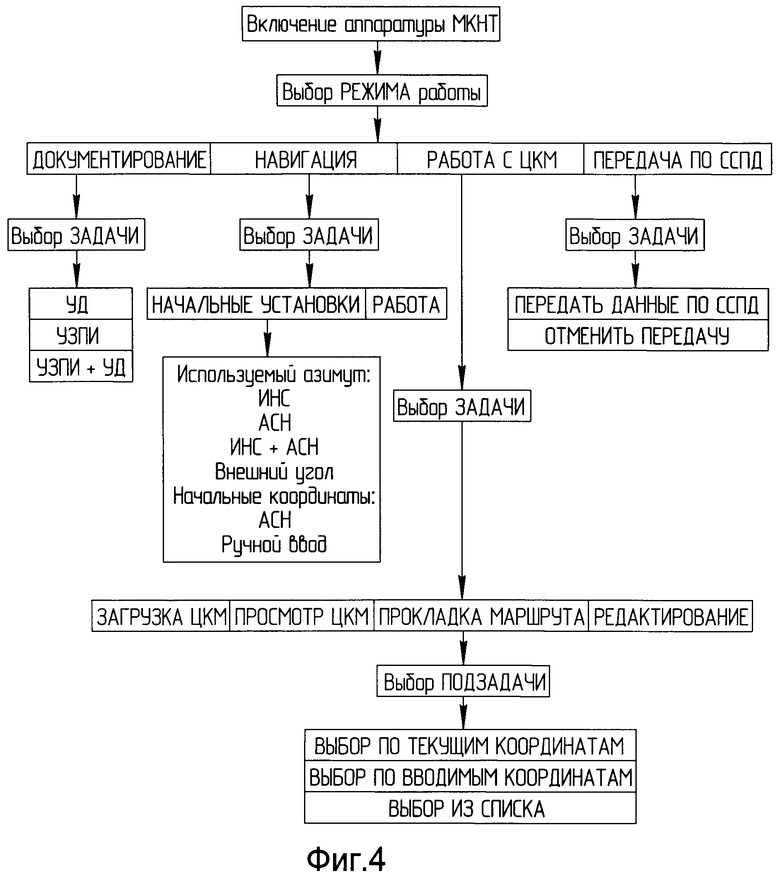
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема определения дирекционного угла продольной оси топопривязчика; на фиг.2 - схема начального ориентирования мобильного комплекса навигации и топопривязки; на фиг.3 - рабочее окно оператора при решении подзадачи ВЫБОР ПО ТЕКУЩИМ КООРДИНАТАМ; на фиг.4 - алгоритм функционирования мобильного комплекса навигации и топопривязки.
Топогеодезическая подготовка стрельбы - комплекс мероприятий, проводимых в целях получения топогеодезических данных (координат и высот позиций, целей, пунктов и постов разведки, а также дирекционных углов ориентирных направлений), необходимых для обеспечения пусков ракет, стрельбы артиллерии, а также работы средств артиллерийской разведки.
Эксплуатационный алгоритм использования мобильного комплекса навигации и топопривязки (МКНТ) определяется руководящими документами по организации и работе топогеодезических подразделений Сухопутных войск. Исходя из этого, на МКНТ возлагается решение следующих задач по топогеодезической подготовке войск:
- рекогносцировка маршрута и нанесение дорог на карту;
- вождение колонн по заданному маршруту;
- обеспечение частей и подразделений ракетных войск и артиллерии походными топогеодезическими данными, дирекционными углами ориентирных и эталонных направлений;
- топогеодезическая привязка огневых и стартовых позиций, постов и пунктов наблюдения;
- создание артиллерийских топогеодезических сетей;
- контроль топогеодезической привязки, выполненной расчетами артиллерийских подразделений.
В соответствии с поставленными задачами технология работ МКНТ в условиях боевого применения осуществляется в соответствии со следующим алгоритмом.
1. Получение и уяснение задачи командиром МКНТ, постановка задачи экипажу.
2. Выдвижение МКНТ на начальную точку, включение аппаратуры и ориентирование МКНТ на начальной точке.
Способ ориентирования МКНТ на начальной точке обеспечивает начальное ориентирование без выхода экипажа из МКНТ. Порядок реализации способа заключается в выполнении следующих операций:
- в начале необходимо включить аппаратуру МКНТ;
- на мониторе бортового вычислительного комплекса должно появиться рабочее окно с возможными режимами работы;
- далее оператор выбирает необходимый режим работы, в данном случае это режим НАВИГАЦИЯ;
- после активации режима НАВИГАЦИЯ осуществляется выбор одной из двух задач: НАЧАЛЬНЫЕ УСТАНОВКИ или РАБОТА, в данном случае выбирается задача НАЧАЛЬНЫЕ УСТАНОВКИ, которая выполняется только на неподвижном объекте;
- после активации задачи НАЧАЛЬНЫЕ УСТАНОВКИ выбирается используемый источник азимута α и ввода начальных значений координат X, Y, Н;
- при выборе "Используемый азимут ИНС" для решения навигационных задач используется дирекционный угол продольной оси МКНТ αИНС, определенный с помощью ИНС;
- при выборе "Используемый азимут АСН" для решения навигационных задач используется дирекционный угол продольной оси МКНТ αАСН, определенный с помощью АСН;
- при выборе "Используемый азимут ИНС+НАП" для решения навигационных задач используется дирекционный угол продольной оси МКНТ αИНС+АСН, определенный при комплексировании данных с ИНС и АСН;
- при выборе "Используемый азимут Внешний угол" для решения навигационных задач используется дирекционный угол продольной оси МКНТ αВУ, определенный с помощью автономных приборов;
- при выборе "Начальные координаты АСН" в качестве координат исходного пункта используются координаты (X, Y, Н)АСН, полученные с АСН;
- при выборе "Начальные координаты РУЧНОЙ ВВОД» ввод значений заранее известных координат (X, Y, Н)РВ, осуществляется оператором.
3. Функционирование МКНТ на маршруте.
После выполнения предыдущей задачи НАЧАЛЬНЫЕ УСТАНОВКИ осуществляется выполнение следующей задачи режима НАВИГАЦИЯ - задачи РАБОТА, выполняемой при движении МКНТ по маршруту. При выполнении задачи РАБОТА в реальном режиме времени автоматически отображаются значения текущих навигационных параметров и данные о местоположении мобильного комплекса на цифровой карте местности. При необходимости оператор может нанести дополнительные ориентиры и особые условия состояния маршрута, используя для топопривязки ориентиров и отмечаемых участков маршрута кратковременные остановки МКНТ. При необходимости производится коррекция ИНС по координатам места и скорости. Для коррекции используются данные АСН или ориентиры с известными координатами.
4. После перехода МКНТ к выполнению задачи РАБОТА осуществляется параллельное выполнение следующего автоматизированного режима работы - режима РАБОТА С ЦКМ.
Режим РАБОТА С ЦКМ предназначен для работы с цифровыми картами местности и состоит из трех задач:
- ПРОСМОТР ЦКМ;
- ЗАГРУЗКА ЦКМ;
- ПРОКЛАДКА МАРШРУТА.
На первоначальном этапе при активизированной задаче ПРОСМОТР ЦКМ просматривается меню ЦКМ с номерами установленных листов ЦКМ и далее выбирается нужный лист. При необходимости масштаб карты изменяется.
При необходимости при активации задачи ЗАГРУЗКА ЦКМ, выполняется загрузка дополнительного архива ЦКМ с периферийных загрузочных устройств.
Основной задачей, реализуемой в режиме РАБОТА С ЦКМ, является задача ПРОКЛАДКА МАРШРУТА, предназначенная для определения местоположения (координат и высоты) МКНТ по ЦКМ и выбора маршрута движения.
При выборе подзадачи ВЫБОР ПО ТЕКУЩИМ КООРДИНАТАМ происходит вывод листа карты, соответствующего текущим координатам, где отмечена начальная точка маршрута. При подведении указателя в виде перекрестия к любому месту на ЦКМ выводятся координаты данного места.
Прокладка маршрута осуществляется за счет фиксации текущих точек проходимого маршрута на ЦКМ, при этом соседние точки будут соединены между собой прямой линией.
При выборе подзадачи ВЫБОР ПО ВВОДИМЫМ КООРДИНАТАМ ввод координат осуществляется оператором, при этом происходит вывод листа карты, соответствующего введенным координатам. Графическая прокладка маршрута на ЦКМ будет производиться согласно вводимым координатам.
При активации подзадачи ВЫБОР ИЗ СПИСКА прокладка маршрута осуществляется по электронным каталогам (спискам) известных координат. После выбора необходимого количества списочных точек осуществляется просмотр выбранного маршрута, который при необходимости редактируется.
5. Передача результатов топопривязки производится по автоматизированному каналу информационного обмена ССПД с пунктами управления вышестоящих и взаимодействующих формирований с учетом приоритетов абонентов как во время движения по маршруту, так и на остановке на конечной или привязываемой точке.
Для этого необходимо перейти в режим ПЕРЕДАЧА ПО ССПД и подтвердить необходимость передачи данных.
6. На конечной точке, после полной остановки МКНТ в зависимости от поставленной задачи выполняются следующие операции:
- уточняются координаты места МКНТ;
уточнение производится при помощи АСН либо при наличии местных ориентиров с известными координатами с помощью автономных приборов;
- производится топогеодезическая привязка ориентиров на местности и огневых позиций орудий или ракетных установок;
- в вычислителе МКНТ решается задача по определению дирекционных углов направлений между точками огневых позиций и привязанными ориентирами на местности. Полученные значения углов и координаты огневых позиций по радиосвязи передаются потребителям.
При работе МКНТ на конечном пункте допускается его перемещение между сеансами топопривязки при необходимости изменения обзора местности.
7. По завершении привязки выполняется печатное изготовление необходимого количества карт с навигационной информацией.
Для этого необходимо активизировать режим ДОКУМЕНТИРОВАНИЕ, в котором возможно документирование: запись данных в устройство записи и передачи информации (УЗПИ) и печать данных на устройстве документирования (УД).
Далее проводится распределение топографического материала между взаимодействующими подразделениями.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа функционирования мобильного комплекса навигации и топопривязки, оснащенного современными аппаратными средствами, в условиях боевого применения, определяющего оптимальный алгоритм его функционирования и обеспечивающего с высокой степенью автоматизации выполнение комплекса мероприятий по топогеодезической подготовке элементов боевых порядков войск, передачу и распределение полученной информации по назначению.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВОЙСКАМИ | 2012 |
|
RU2511207C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2012 |
|
RU2498221C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ ВЫСОКОГО КЛАССА ТОЧНОСТИ | 2012 |
|
RU2500990C1 |
| СПОСОБ СОЗДАНИЯ ТОПОГЕОДЕЗИЧЕСКИХ СЕТЕЙ ДЛЯ ПОДГОТОВКИ БОЕВЫХ ДЕЙСТВИЙ РАКЕТНЫХ ВОЙСК, АРТИЛЛЕРИИ И ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ СУХОПУТНЫХ ВОЙСК | 2014 |
|
RU2581109C9 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| СПОСОБ ПРИМЕНЕНИЯ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2487316C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА | 2014 |
|
RU2572407C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ УНИВЕРСАЛЬНОГО ТОПОПРИВЯЗЧИКА (УТП) | 2010 |
|
RU2440558C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ И КОМПЛЕКТ СРЕДСТВ ДЛЯ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2490594C1 |


Изобретение относится к измерительной технике, а именно к способам функционирования мобильных комплексов навигации и топопривязки в условиях боевого применения, и может быть использовано для решения задач топогеодезической подготовки боевых действий ракетных войск и артиллерии Сухопутных войск. Технический результат - расширение функциональных возможностей. Для достижения данного результата способ функционирования мобильного комплекса навигации и топопривязки (топопривязчика) в условиях боевого применения включает в себя выполнение операции подготовки к выполнению боевой (учебной) задачи, проведение ориентирования на начальной точке - определение дирекционного угла и координат начальной точки, архивирование полученных на привязываемых точках топогеодезических данных, перемещение к конечной (привязываемой) точке, нанесение маршрута движения и дополнительных ориентиров на топографическую карту, определение погрешности координат конечной (привязываемой) точки, проведение топогеодезической привязки ориентиров на местности и огневых позиций орудий или ракетных установок, доклад командованию и передачу результатов привязки обслуживаемым подразделениям. 4 ил.
Способ функционирования мобильного комплекса навигации и топопривязки (топопривязчика) в условиях боевого применения, включающий в себя выполнение операции подготовки к выполнению боевой (учебной) задачи, проведение ориентирования на начальной точке - определение дирекционного угла и координат начальной точки, архивирование полученных на привязываемых точках топогеодезических данных, перемещение к конечной (привязываемой) точке, нанесение маршрута движения и дополнительных ориентиров на топографическую карту, определение погрешности координат конечной (привязываемой) точки, проведение топогеодезической привязки ориентиров на местности и огневых позиций орудий или ракетных установок, доклад командованию и передачу результатов привязки обслуживаемым подразделениям, отличающийся тем, что подготовка мобильного комплекса навигации и топопривязки (МКНТ) к выполнению боевой (учебной) задачи после выполнения стандартных операций по включению аппаратуры заключается в приведении навигационной аппаратуры МКНТ, неподвижно установленного на начальной точке, в автоматизированный режим «Навигация», проведение ориентирования МКНТ на начальной точке заключается в выборе первой задачи режима навигации - задачи «Начальная установка», в ходе которой определяются используемые источники навигационной информации об азимуте α и начальных значениях координат X, Y, Н: инерциальная навигационная система (ИНС) или аппаратура спутниковой навигации (АСН), или обобщенные данные от совместного использования ИНС и АСН, или данные, определенные с помощью автономных приборов, архивирование топогеодезических данных в процессе работы МКНТ производится автоматически в виде электронных каталогов (списков), перемещение МКНТ к конечной (привязываемой) точке осуществляется после выполнения предыдущей задачи и появления оперативного сообщения о готовности к выполнению второй задачи режима навигации - задачи «Работа» на маршруте, при выполнении второй задачи навигации в реальном режиме времени на цифровой карте местности (ЦКМ) автоматически отображаются значения текущих навигационных параметров и данные местоположения МКНТ, после перехода комплекса к выполнению второй задачи навигации осуществляется параллельное выполнение следующего автоматизированного режима работы комплекса - режима «Работа с ЦКМ», основной задачей которого является задача «Прокладка маршрута», которая выполняется при помощи активизации одной из трех подзадач: «Выбор маршрута по текущим координатам», «Выбор маршрута по вводимым координатам», «Выбор маршрута из списка» - предварительно подготовленного электронного каталога (списка) навигационных данных, определение погрешности азимута и координат места МКНТ осуществляется автоматически за счет интегрированной обработки навигационной информации, поступающей от ИНС и АСН, передача результатов привязки производится по автоматизированному каналу информационного обмена системы связи и передачи данных (ССПД) с пунктами управления вышестоящих и взаимодействующих формирований с учетом приоритетов абонентов как во время движения по маршруту, так и на остановке на привязываемых точках, по завершении топогеодезической привязки непосредственно на МКНТ выполняется печатное изготовление необходимого количества топографических карт с нанесенной на них топогеодезической информацией.
| Учебник сержанта ракетных войск и артиллерии Сухопутных войск для командиров топогеодезических отделений и топопривязчиков./ Под ред | |||
| В.В.БУРОВА | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| - М.: Воениздат, 1975, с.3-24, 56-84 | |||
| Устройство для транспортирования рыбы из невода в лабаз | 1932 |
|
SU32262A1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ПЕРВИЧНОЙ УТИЛИЗАЦИИ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ НА МЕСТАХ ИХ ДИСЛОКАЦИИ | 2005 |
|
RU2309061C2 |
| Цифровой измеритель параметров движения | 1986 |
|
SU1476388A1 |
| Устройство для определения параметров положения объектов | 1984 |
|
SU1218406A1 |
| US 6765499 В2, 20.07.2004 | |||
| US 6816761 В2, 09.11.2004 | |||
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207262C1 |

