Изобретение относится к военной технике, а именно к способам применения навигационной аппаратуры, устанавливаемой на подвижных комплексах вооружений, в условиях боевого применения, и может быть использовано для решения задач топогеодезического обеспечения боевых действий подразделений Сухопутных войск.
Известен топопривязчик УА3-452Т (см. Топопривязчик УАЗ-452Т. Техническое описание и инструкция по эксплуатации БИ2 511003 ТО, стр.10-15, Формуляр БИ2 511003 Ф, стр.6, 7), принятый за прототип. Топопривязчик УАЗ-452Т представляет собой автомобиль УАЗ-452АЭ (подвижный объект), в котором смонтирован комплект специальных приборов наземной навигационной аппаратуры (система навигации и топопривязки) со вспомогательным оборудованием.
Задача топографической привязки заключается в определении прямоугольных координат привязываемой точки и в определении дирекционного угла направления с привязываемой точки на какой-либо ориентир,
Принцип работы топопривязчика сводится к непрерывному автоматическому решению прямой геодезической задачи путем подачи в счетно-решающий прибор (вычислитель) в каждый момент движения данных о проходимом подвижным объектом пути и о дирекционном угле направления его движения.
В вычислителе производится выработка текущих координат и дирекционного угла объекта и отображение пройденного им пути и его местоположения на географической карте.
Точность работы топоривязчика характеризуется средними квадратическими погрешностями в определении координат X, Y и средними арифметическими погрешностями в определении дирекционных углов направления продольной оси подвижного объекта α.
Погрешности не превышают:
- в определении координат точек - 22 м на дальностях до 4 км и 0,6% от пройденного пути на дальностях свыше 4 км, при этом обеспечивается возможность настройки топривязчика с точностью определения координат точек - 20 м на дальностях до 4 км и 0,5% от пройденного пути на дальностях свыше 4 км;
- в определении дирекционных углов направления - 0-05 (18 угл. мин) за каждые 15 минут движения.
При движении топопривязчика по местности со скользким (сыпучим) грунтом погрешности возрастают в 1,5-2 раза.
Время подготовки навигационной аппаратуры топопривязчика к работе не более 15 минут без учета подготовки подвижного объекта.
Таким образом, способ применения системы топопривязки и навигации, используемый в топопривязчике УАЗ-452Т, обеспечивает выполнение следующих задач по назначению:
- определение на стоянке и в движении пути D, прямоугольных координат X, Y транспортного средства, дирекционного угла направления его продольной оси α;
- передачу значений измеряемых параметров в вычислитель, их обработку и отображение на географической карте.
Таким образом, способ применения системы топопривязки и навигации, используемый в топопривязчике УАЗ-452Т, обеспечивает выполнение следующих тактических характеристик:
- время подготовки системы топопривязки и навигации в топопривязчике УАЗ-452Т к работе не превышает 15 мин;
- начальное ориентирование топопрвязчика с помощью бортовых и выносных средств, входящих в состав топопривязчика (оптический визир, буссоль);
- ручной ввод в вычислитель значений начальных координат и начального ориентирного направления.
Таким образом, способ применения системы топопривязки и навигации, используемый в топопривязчике УАЗ-452Т, обеспечивает выполнение следующих технических характеристик:
- определение координат точек со средней квадратической погрешностью - 22 м на дальностях до 4 км и 0,6% от пройденного пути на дальностях свыше 4 км;
- определение дирекционных углов направления со средней арифметической погрешностью - 0-05 (18 угл. мин) за каждые 15 минут движения.
Недостатками способа применения системы топопривязки и навигации, используемого в топопривязчике УАЗ-452Т, взятого за прототип, являются:
- длительное время подготовки системы топопривязки и навигации к работе;
- отсутствие возможности проведения начального ориентирования подвижного объекта автоматически;
- отсутствие возможности автоматического ввода начальных координат и начального ориентирного направления;
- отсутствие возможности определения высоты нахождения подвижного объекта Н, его углов крена ψ и тангажа φ;
- отсутствие возможности загрузки карт местности с внешнего накопителя и их автоматической смены;
- отсутствие возможности автоматического определения координат произвольных точек карты местности;
- отсутствие возможности обеспечения функционирования системы топопривязки и навигации в широком географическом диапазоне широт и высот над уровнем моря;
- низкая точность определения навигационных параметров, обусловленная несовершенством аппаратного состава системы навигации и топопривязки;
- невозможность использования без значительных изменений аппаратуры навигации и топопривязки в других комплексах вооружений, имеющих различные типы шасси и функциональную направленность.
Предлагаемым изобретением решается задача по повышению эффективности топогеодезического обеспечения Сухопутных войск.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа применения универсальной системы топопривязки и навигации, оснащенной современными аппаратными средствами, обеспечивающего небольшое время подготовки к работе, определение расширенного ряда параметров, автоматическое выполнение основных функциональных задач и высокую точность вычислений навигационных определений в различных подвижных комплексах вооружений.
Указанный технический результат достигается тем, что в предлагаемом способе применения универсальной системы топопривязки и навигации, включающем в себя выполнение задач по назначению: определение на стоянке и в движении пути S, прямоугольных координат X, Y подвижного объекта, дирекционного угла направления его продольной оси α, передачу значений измеряемых параметров в вычислитель, их обработку, отображение на географической карте пути и местоположения подвижного объекта, обеспечение тактических характеристик: времени подготовки системы топопривязки и навигации к работе не более 15 мин, начального ориентирования подвижного объекта с помощью бортовых и выносных средств, входящих в его состав (оптический визир, буссоль), ручной ввод в вычислитель значений начальных координат и начального ориентирного направления, выполнение технических характеристик: определение координат точек со средней квадратической погрешностью не более 22 м на дальностях до 4 км и не более 0,6% от пройденного пути на дальностях свыше 4 км, определение дирекционных углов направления со средней арифметической погрешностью - 0-05 (18 угл. мин) за каждые 15 минут движения, новым является то, что при выполнении задач по назначению система топопривязки и навигации дополнительно обеспечивает на стоянке и в движении определение углов крена ψ и тангажа φ и высоты Н подвижного объекта, загрузку в бортовой вычислитель цифровых карт местности формата SFX4 с внешнего накопителя, автоматическую смену листов цифровой карты местности любого масштаба при выходе подвижного объекта за их границу, автоматическое определение на цифровой карте местности координат X, Y и высоты Н точек, отмеченных курсором оператора, при выполнении задач по обеспечению тактических характеристик система топопривязки и навигации обеспечивает время подготовки к работе при внешней температуре от 5°С и выше не более (4…6) мин, при низких температурах не более (9…11) мин, время непрерывной работы без изменения всех точностных характеристик - не менее (24…26) ч, заданные характеристики в диапазоне географических широт от 70° Северной широты до 70° Южной широты в любое время суток, в любых дорожных условиях, допускающих движение подвижного объекта, работу на местности с абсолютной высотой до 4000 м над уровнем моря, автоматическое начальное ориентирование с помощью автономных средств навигации в режиме гирокомпасирования и определение начальных координат с помощью спутниковой аппаратуры с дальнейшим автоматическим вводом этих данных в бортовой вычислитель, при выполнении задач по обеспечению технических характеристик система топопривязки и навигации обеспечивает определение на стоянке и в движении плоских прямоугольных координат при использовании информации о скорости от датчиков скорости со средней квадратической погрешностью не более (0,08…0,1)% от пройденного пути, определение на стоянке и в движении плоских прямоугольных координат при использовании информации о скорости от датчиков скорости и непрерывной коррекции по сигналам от спутниковой аппаратуры и системы определения высоты со средней квадратической погрешностью не более (0,04…0,06)% от пройденного пути при средней квадратической погрешности определения высоты - (3…5) м, определение начального дирекционного угла продольной оси подвижного объекта со средней квадратической погрешностью не более (1-2) угл. мин при времени гирокомпасирования не более 6 мин с учетом времени проведения тест-контроля, непрерывное определение на стоянке и в движении углов крена (ψ) и тангажа (φ) со средней квадратической погрешностью не более: (3-4) угл. мин при движении, (1-2) угл. мин на стоянке через 1 минуту после прекращения движения.
Дополнительное обеспечение при выполнении задач по назначению системой топопривязки и навигации на стоянке и в движении определения углов крена ψ, тангажа φ и высоты Н подвижного объекта позволяет:
- в целом повысить точность навигационных определений системы топоривязки и навигации, в частности, за счет сигналов с системы определения высоты;
- обеспечить безопасность при движении подвижного объекта за счет контроля текущих предельных значений углов крена ψ и тангажа φ подвижного объекта.
Дополнительное обеспечение при выполнении задач по назначению системой топопривязки и навигации загрузки в бортовой вычислитель цифровых карт местности формата SFX4 с внешнего накопителя позволяет:
- обеспечить полный картографический архив, охватывающий территориально район проведения работ;
- обеспечить работу с картами любого масштаба.
Дополнительное обеспечение при выполнении задач по назначению системой топопривязки и навигации автоматической смены листов цифровой карты местности любого масштаба при выходе подвижного объекта за их границу позволяет обеспечить непрерывность навигационных определений на всем протяжении маршрута продвижения подвижного объекта.
Дополнительное обеспечение при выполнении задач по назначению системой топопривязки и навигации автоматического определения на цифровой карте местности координат X, Y и высоты Н точек, отмеченных курсором оператора, позволяет:
- обеспечить оперативное формирование специальных геодезических сетей;
- обеспечить прокладку предполагаемого маршрута продвижения;
- сформировать развернутую систему ориентиров.
Обеспечение при выполнении задач по отработке тактических характеристик системой топопривязки и навигации времени подготовки к работе при внешней температуре от 5°С и выше не более (4…6) мин, при низких температурах не более (9…11) мин позволяет:
- обеспечить высокую готовность к работе системы топопривязки и навигации
- повысить в целом боеготовность подвижного комплекса вооружений, на котором установлена система топопривязки и навигации.
Обеспечение при выполнении задач по отработке тактических характеристик системой топопривязки и навигации времени непрерывной работы без изменения всех точностных характеристик - не менее (24…26) ч позволяет:
- повысить производительность производимых системой топопривязки и навигации работ по топогеодезическому обеспечению:
- подтвердить высокую надежность системы.
Обеспечение при выполнении задач по отработке тактических характеристик системой топопривязки и навигации заданных характеристик в диапазоне географических широт от 70° Северной широты до 70° Южной широты в любое время суток, в любых дорожных условиях, допускающих движение подвижного объекта, позволяет:
- обеспечить работу системы в любом практически доступном месте земного шара, в любых климатических районах;
- расширить возможности практического использования системы топопривязки и навигации.
Обеспечение при выполнении задач по отработке тактических характеристик системой топопривязки и навигации работы на местности с абсолютной высотой до 4000 м над уровнем моря позволяет производить топогеодезические определения в штатном режиме функционирования системы в условиях горной местности.
Обеспечение при выполнении задач по отработке тактических характеристик системой топопривязки и навигации автоматического начального ориентирования с помощью автономных средств навигации в режиме гирокомпасирования и определение начальных координат с помощью спутниковой аппаратуры с дальнейшим автоматическим вводом этих данных в бортовой вычислитель позволяет:
- производить с высокой точностью работы на исходном пункте без выхода расчета из подвижного комплекса вооружений;
- ускорить процесс начального ориентирования и определения начальных координат подвижного объекта.
Обеспечение при выполнении задач по отработке технических характеристик системой топопривязки и навигации определения на стоянке и в движении плоских прямоугольных координат при использовании информации о скорости от датчиков скорости со средней квадратической погрешностью не более (0,08…0,1)% от пройденного пути позволяет:
- получить высокую точность определения параметров навигации в полностью автономном режиме за счет вычислений, произведенных автономной аппаратурой навигации;
- обеспечить высокий уровень автономности комплекса вооружений при отсутствии сигналов с внешних источников информации.
Обеспечение при выполнении задач по отработке технических характеристик системой топопривязки и навигации определения на стоянке и в движении плоских прямоугольных координат при использовании информации о скорости от датчиков скорости и при непрерывной коррекции по сигналам от спутниковой аппаратуры и системы определения высоты со средней квадратической погрешностью не более (0,04…0,06)% от пройденного пути при средней квадратической погрешности определения высоты (3…5) м позволяет повысить точность определения навигационной информации за счет использования комплексирования информации с построенных на различных физических принципах датчиков: датчиков скорости механического и доплеровского, спутниковой аппаратуры и системы определения высоты - барометрического высотомера.
Обеспечение при выполнении задач по отработке технических характеристик системой топопривязки и навигации определения начального дирекционного угла продольной оси подвижного объекта со средней квадратической погрешностью не более (1-2) угл. мин при времени гирокомпасирования не более 6 мин, с учетом времени проведения тест-контроля, позволяет:
- повысить точность определения дирекционного угла продольной оси подвижного объекта;
- обеспечить минимальное время определения дирекционного угла.
Обеспечение при выполнении задач по отработке технических характеристик системой топопривязки и навигации непрерывного определения на стоянке и в движении углов крена (ψ) и тангажа (φ) со средней квадратической погрешностью не более (3-4) угл. мин при движении, (1-2) угл. мин на стоянке через 1 минуту после прекращения движения позволяет обеспечить высокую точность определения углов крена (ψ) и тангажа (φ).
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
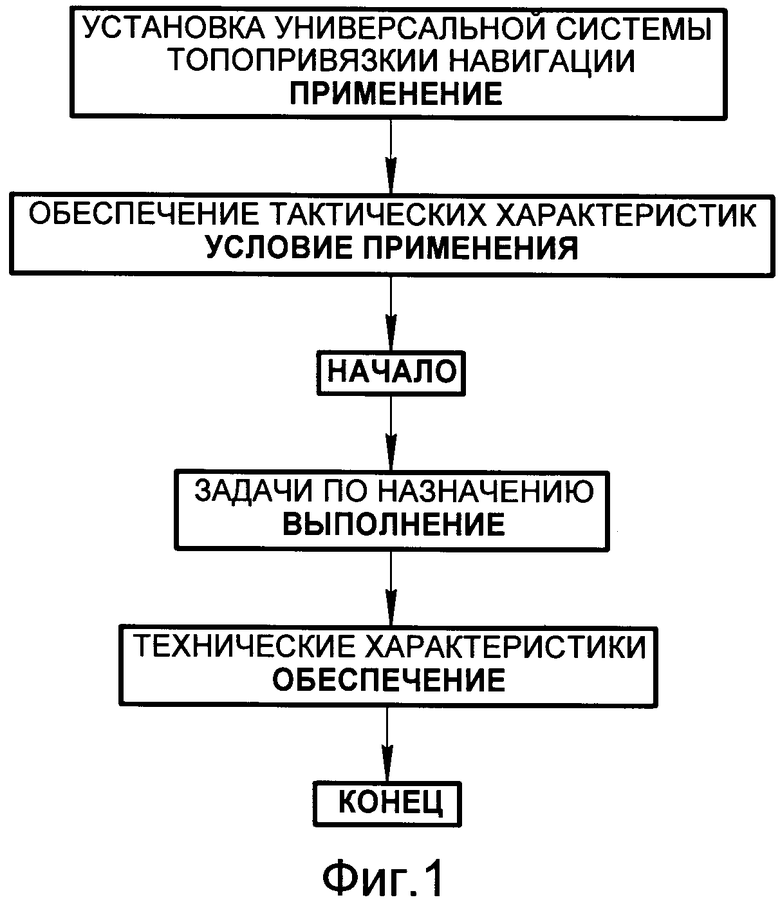
Сущность изобретения поясняется чертежами, где на фиг.1 показан алгоритм применения универсальной системы топопривязки и навигации; на фиг.2 - схема выполнения задач по назначению; на фиг.3 - схема обеспечения тактических характеристик; на фиг.4 - схема обеспечения технических характеристик.
Успешное ведение боевых действий в значительной мере зависит от правильной оценки сложившейся ситуации в районе боевых действий. Своевременное, точное и полное обеспечение войск топогеодезической информацией в районе сосредоточения является основной целью топографических и картографических работ в сухопутных войсках. Схема такого обеспечения зависит от степени предварительной топогеодезической подготовки районов боевых действий, наличия необходимых средств, обладающих необходимым технике аналитическим потенциалом, для выполнения соответствующих задач. Исходя из этого, способ использования универсальной системы топопривязки и навигации в современных условиях характеризуется следующими моментами.
Универсальная система топопривязки и навигации может устанавливаться в специальных машинах - топопривязчиках, основное оборудование которых составляет навигационная аппаратура, а также ею могут быть оснащены другие комплексы вооружений: разведывательные, радиотехнические, инженерные и иные средства.
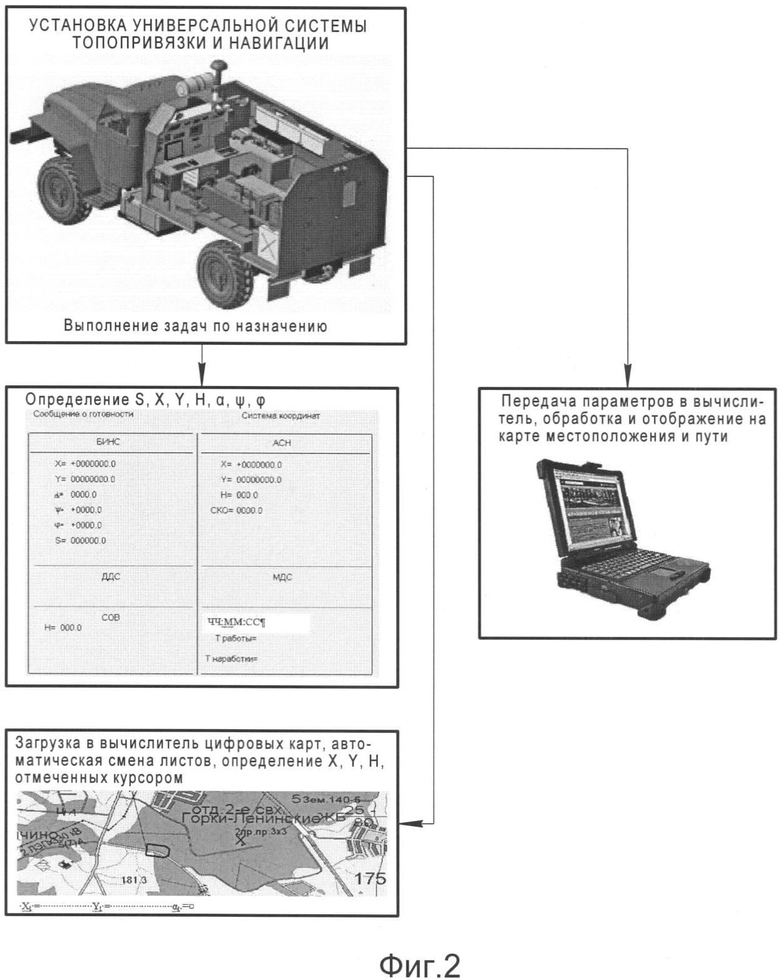
Для полноценного применения универсальной системы топопривязки и навигации обеспечивается решение следующих задач по назначению:
- определение на стоянке и в движении пути S, прямоугольных координат X, Y подвижного объекта, дирекционного угла направления его продольной оси α;
- передачу значений измеряемых параметров в вычислитель, их обработку, отображение на географической карте (цифровой карте местности) пути и местоположения подвижного объекта;
- определение на стоянке и в движении углов крена ψ и тангажа φ и высоты Н подвижного объекта;
- загрузку в бортовой вычислитель цифровых карт местности формата SFX4 с внешнего накопителя, автоматическую смену листов цифровой карты местности любого масштаба при выходе подвижного объекта за их границу, автоматическое определение на цифровой карте местности координат X, Y и высоты Н точек, отмеченных курсором оператора.
Необходимым условием применения универсальной системы топопривязки и навигации является обеспечение выполнения следующих тактических характеристик:
- время подготовки к работе при внешней температуре от 5°С и выше не более (4…6) мин, при низких температурах не более (9…11) мин;
- время непрерывной работы без изменения всех точностных характеристик - не менее (24…26) ч;
- заданные характеристики должны обеспечиваться в диапазоне географических широт от 70° Северной широты до 70° Южной широты в любое время суток, в любых дорожных условиях, допускающих движение подвижного объекта;
- работу на местности с абсолютной высотой до 4000 м над уровнем моря;
- начальное ориентирование подвижного объекта с помощью бортовых и выносных средств, входящих в его состав (оптический визир, буссоль);
- ручной ввод в вычислитель значений начальных координат и начального ориентирного направления;
- автоматическое начальное ориентирование с помощью автономных средств навигации в режиме гирокомпасирования и определение начальных координат с помощью спутниковой аппаратуры с дальнейшим автоматический вводом этих данных в бортовой вычислитель.
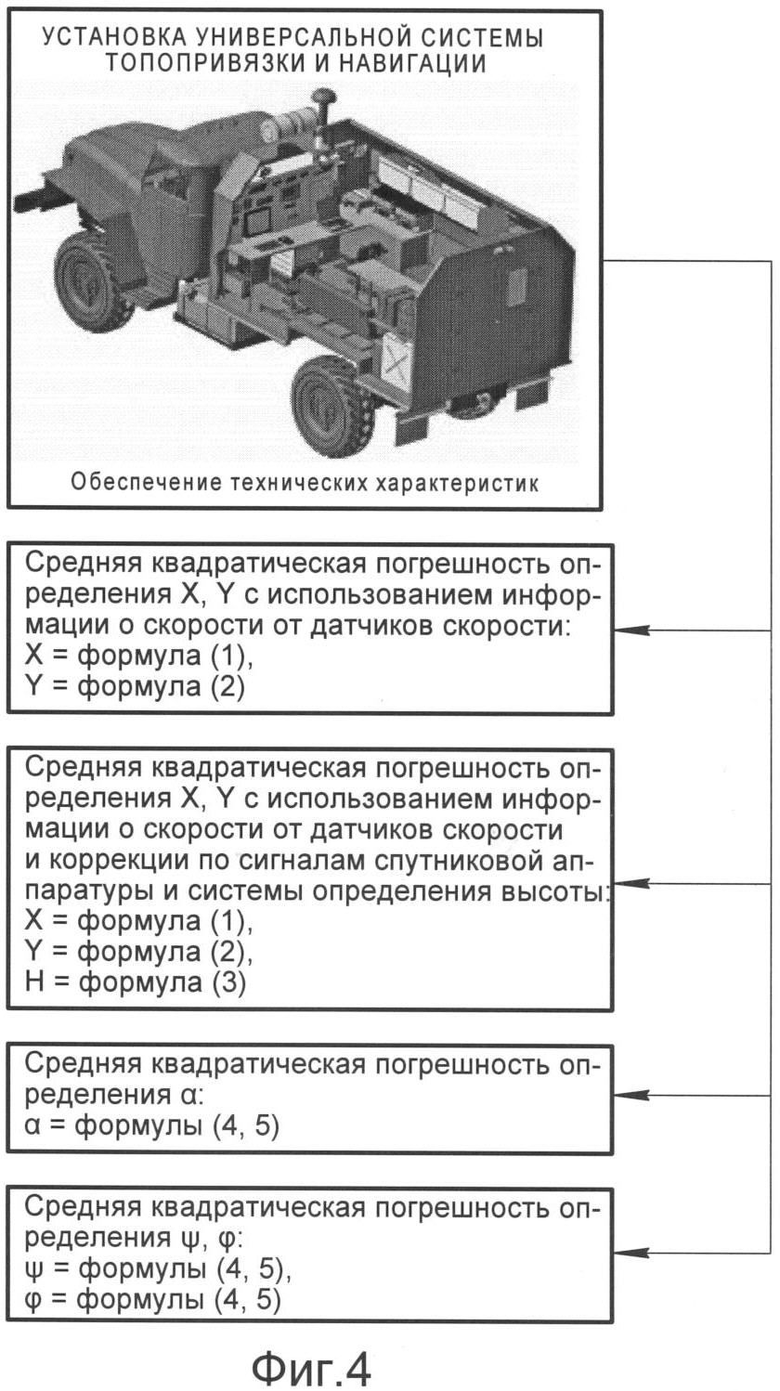
Необходимая точность навигационных определений обеспечивается при выполнении следующих технических характеристик:
- средняя квадратическая погрешность при определении на стоянке и в движении плоских прямоугольных координат с использованием информации о скорости от датчиков скорости должна быть не более (0,08…0,1)% от пройденного пути. Расчет средних квадратических погрешностей плоских прямоугольных координат X, Y производится по формулам:
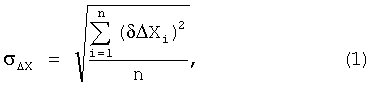
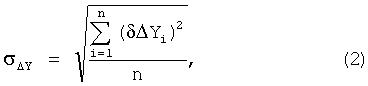
где δΔXi и δΔYi - значения соответствующих погрешностей определения приращений в i-й реализации;
n - общее число реализации;
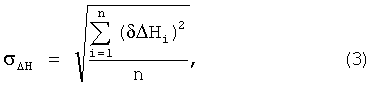
- средняя квадратическая погрешность при определении на стоянке и в движении плоских прямоугольных координат при использовании информации о скорости от датчиков скорости и непрерывной коррекции по сигналам от спутниковой аппаратуры и системы определения высоты должна быть не более (0,04…0,06)% от пройденного пути при средней квадратической погрешности определения высоты - (3…5) м. Расчет средней квадратической погрешности по координате Н производится по формуле:
- средняя квадратическая погрешность при определении начального дирекционного угла продольной оси подвижного объекта должна быть не более (1-2) угл. мин при времени гирокомпасирования не более 6 мин с учетом времени проведения тест-контроля. Расчет средней квадратической погрешности дирекционного угла продольной оси подвижного объекта производится по формулам:

где под символом «αop» понимается любой из угловых параметров: курс, крен, тангаж;
αopi - значение углового параметра в i-й реализации;

n - общее число реализации;
- средняя квадратическая погрешность при непрерывном определении на стоянке и в движении углов крена (ψ) и тангажа (φ) должна быть не более: (3-4) угл. мин при движении, (1-2) угл. мин на стоянке через 1 минуту после прекращения движения.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа применения универсальной системы топопривязки и навигации, оснащенной современными аппаратными средствами, обеспечивающего небольшое время подготовки к работе, определение расширенного ряда параметров, автоматическое выполнение основных функциональных задач и высокую точность вычислений навигационных определений, в различных подвижных комплексах вооружений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ И КОМПЛЕКТ СРЕДСТВ ДЛЯ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2490594C1 |
| СПОСОБ СОЗДАНИЯ ТОПОГЕОДЕЗИЧЕСКИХ СЕТЕЙ ДЛЯ ПОДГОТОВКИ БОЕВЫХ ДЕЙСТВИЙ РАКЕТНЫХ ВОЙСК, АРТИЛЛЕРИИ И ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ СУХОПУТНЫХ ВОЙСК | 2014 |
|
RU2581109C9 |
| Способ контроля точностных характеристик системы топопривязки и навигации | 2016 |
|
RU2659614C9 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА | 2014 |
|
RU2572407C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
Изобретение относится к военной технике и может быть использовано для решения задач топогеодезического обеспечения боевых действий подразделений Сухопутных войск. Технический результат - расширение функциональных возможностей. Для этого процессы топопривязки и навигации включают: определение на стоянке и в движении пути S, прямоугольных координат X, Y подвижного объекта, дирекционного угла направления его продольной оси α; передачу значений измеряемых параметров в вычислитель, их обработку, отображение на географической карте пути и местоположения подвижного объекта, обеспечение тактических характеристик: времени подготовки системы топопривязки и навигации к работе не более 15 мин, начального ориентирования подвижного объекта с помощью бортовых и выносных средств, входящих в его состав (оптический визир, буссоль), ручной ввод в вычислитель значений начальных координат и начального ориентирного направления, выполнение технических характеристик: определение координат точек со средней квадратической погрешностью не более 22 м на дальностях до 4 км и не более 0,6% от пройденного пути на дальностях свыше 4 км, определение дирекционных углов направления со средней арифметической погрешностью - 0-05 (18 угл. мин) за каждые 15 минут движения. 4 ил.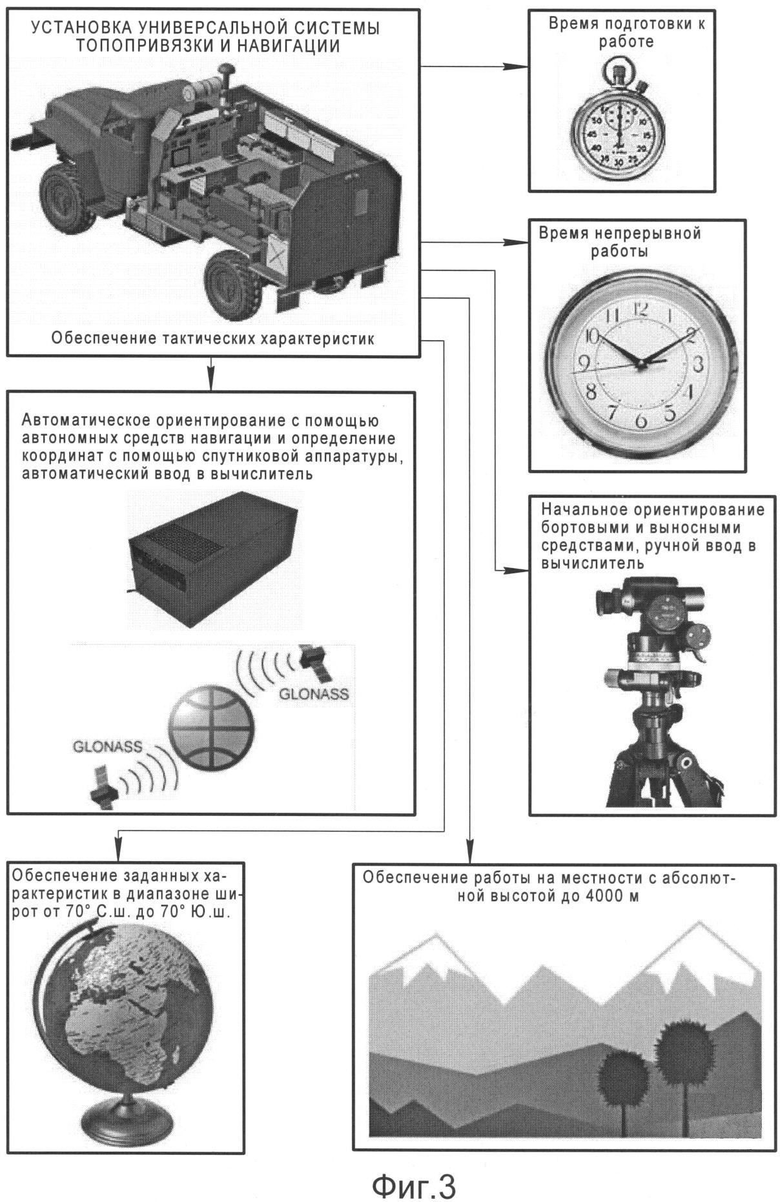
Способ применения универсальной системы топопривязки и навигации, включающий в себя выполнение задач по назначению: определение на стоянке и в движении пути S, прямоугольных координат X, Y подвижного объекта, дирекционного угла направления его продольной оси α, передачу значений измеряемых параметров в вычислитель, их обработку, отображение на географической карте пути и местоположения подвижного объекта, обеспечение тактических характеристик: времени подготовки системы топопривязки и навигации к работе не более 15 мин, начального ориентирования подвижного объекта с помощью бортовых и выносных средств, входящих в его состав (оптический визир, буссоль), ручного ввода в вычислитель значений начальных координат и начального ориентирного направления, выполнение технических характеристик: определение координат точек со средней квадратической погрешностью не более 22 м на дальностях до 4 км и не более 0,6% от пройденного пути на дальностях свыше 4 км, определение дирекционных углов направления со средней арифметической погрешностью - 0-05 (18 угл. мин) за каждые 15 мин движения, отличающийся тем, что при выполнении задач по назначению система топопривязки и навигации дополнительно обеспечивает на стоянке и в движении определение углов крена ψ и тангажа φ и высоты Н подвижного объекта, загрузку в бортовой вычислитель цифровых карт местности формата SFX4 с внешнего накопителя, автоматическую смену листов цифровой карты местности любого масштаба при выходе подвижного объекта за их границу, автоматическое определение на цифровой карте местности координат X, Y и высоты Н точек, отмеченных курсором оператора, при выполнении задач по обеспечению тактических характеристик система топопривязки и навигации обеспечивает время подготовки к работе при внешней температуре от 5°С и выше не более 4…6 мин, при низких температурах не более 9…11 мин, время непрерывной работы без изменения всех точностных характеристик - не менее 24…26 ч, заданные характеристики в диапазоне географических широт от 70° Северной широты до 70° Южной широты в любое время суток, в любых дорожных условиях, допускающих движение подвижного объекта, работу на местности с абсолютной высотой до 4000 м над уровнем моря, автоматическое начальное ориентирование с помощью автономных средств навигации в режиме гирокомпасирования и определение начальных координат с помощью спутниковой аппаратуры с дальнейшим автоматическим вводом этих данных в бортовой вычислитель, при выполнении задач по обеспечению технических характеристик система топопривязки и навигации обеспечивает определение на стоянке и в движении плоских прямоугольных координат при использовании информации о скорости от датчиков скорости со средней квадратической погрешностью не более 0,08…0,1% от пройденного пути, определение на стоянке и в движении плоских прямоугольных координат при использовании информации о скорости от датчиков скорости и непрерывной коррекции по сигналам от спутниковой аппаратуры и системы определения высоты со средней квадратической погрешностью не более 0,04…0,06% от пройденного пути при средней квадратической погрешности определения высоты 3…5 м, определение начального дирекционного угла продольной оси подвижного объекта со средней квадратической погрешностью не более 1-2 угл. мин при времени гирокомпасирования не более 6 мин с учетом времени проведения тест-контроля, непрерывное определение на стоянке и в движении углов крена (ψ) и тангажа (φ) со средней квадратической погрешностью не более: 3-4 угл. мин при движении, 1-2 угл. мин на стоянке через 1 мин после прекращения движения.
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| Устройство для транспортирования рыбы из невода в лабаз | 1932 |
|
SU32262A1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ПЕРВИЧНОЙ УТИЛИЗАЦИИ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ НА МЕСТАХ ИХ ДИСЛОКАЦИИ | 2005 |
|
RU2309061C2 |

