Изобретение относится к сельскому хозяйству и может быть использовано для содержания животных.
Известны клетки для содержания животных в животноводческих помещениях с самоочищающимся полом (www.movingfloor.se). которые для содержания животных в чистоте выполняются с полом в виде ленты транспортера. Интервалы между очисткой пола можно регулировать вручную или автоматически при помощи компьютера. Данная конструкция позволяет уменьшить расход подстилки и экономить рабочее время.
Недостатком данного устройства является периодичность уборки клетки, что не обеспечивает своевременной уборки по мере возникающей необходимости. Кроме того, предполагаемое групповое содержание животных затрудняет определение требуемого момента очистки.
Наиболее близким к предлагаемому устройству (прототипом) является клетка для содержания животных (патент РФ на полезную модель №75135, МПК А01К 29/00 от 11.03.2008 г., бюлл. №21 от 27.07.2008 г.), в которой пол клетки выполнен в виде транспортера с возможностью изменения угла его наклона, под которым установлен скребок для очистки ленты транспортера.
Данная клетка предназначена для одиночного содержания животных, но также не предусматривает устройств, позволяющих определить требуемый момент начала и окончания ее очистки. Несвоевременная же очистка клеток ведет к распространению навоза по всей поверхности пола клетки, попаданию его на тело животного и его загрязнению, ухудшает последующую очистку пола скребком.
Технической задачей изобретения является автоматизация процесса очистки клетки, при которой произойдет улучшение условий содержания животных при уменьшении затрат ручного труда.
Указанная задача достигается тем, что согласно изобретения с одной стороны клетки установлены два ряда источников сигналов, а с другой стороны клетки два ряда соответствующих им приемников сигналов, нижний ряд источников и приемников сигналов установлен непосредственно над уровнем ленты транспортера, верхний ряд источников и приемников сигналов установлен на 20-40 см выше нижнего ряда, выход каждого приемника сигнала нижнего ряда, установленного под приемником сигнала верхнего ряда, через инвертор соединен с входом соответствующего ему элемента «И», второй вход которого соединен с соответствующим приемником верхнего ряда, выходы всех схем «И» соединены с входом элемента «ИЛИ», выход которого через усилитель соединен с электрическим двигателем транспортера.
Отличие предлагаемого устройства от прототипа заключается в том, что с одной стороны клетки установлены два ряда источников сигналов, а с другой стороны клетки два ряда соответствующих им приемников сигналов, нижний ряд источников и приемников сигналов установлен непосредственно над уровнем ленты транспортера, верхний ряд источников и приемников сигналов установлен на 20-40 см выше нижнего ряда, выход каждого приемника сигнала нижнего ряда, установленного под приемником сигнала верхнего ряда, через инвертор соединен с входом соответствующего ему элемента «И», второй вход которого соединен с соответствующим приемником верхнего ряда, выходы всех схем «И» соединены с входом элемента «ИЛИ», выход которого через усилитель соединен с электрическим двигателем транспортера.
На фиг.1 представлена схема расположения источников сигналов 1, 2, 3 верхнего и 4, 5, 6 нижнего ряда и приемников сигналов 7, 8, 9 верхнего и 10, 11, 12 нижнего ряда на боковых стенках 13 и 14 клетки. Пунктирами показаны пути прохождения сигналов от источников до соответствующих им приемников. Пол клетки выполнен в виде транспортера 24, приводимого в движение двигателем 23. Под лентой транспортера 24 установлен скребок 25.
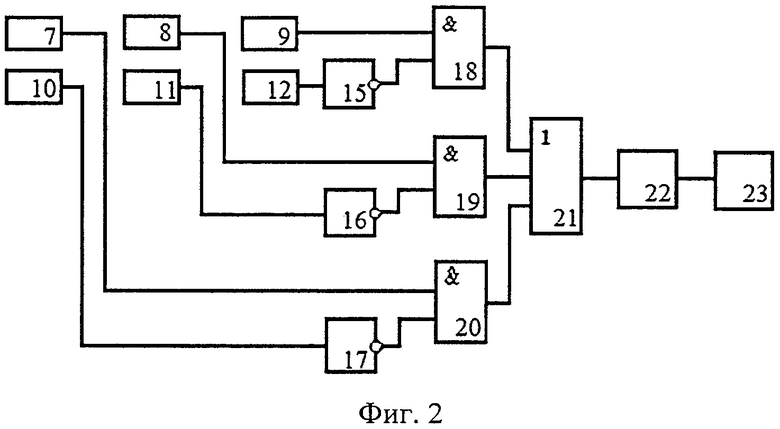
На фиг.2 представлена схема формирования команды на включение двигателя транспортера. Выходы приемников 7, 8, 9 сигналов верхнего ряда подключены к входам схем «И» 18, 19 и 20 соответственно. Выходы приемников 10, 11, 12 сигналов нижнего ряда через инверторы 15, 16, 17 подключены к другим входам схем «И» 18, 19 и 20 соответственно. Выходы всех схем «И» подключены к входу схемы «ИЛИ» 21, выход которой через усилитель 22 подключен к входу электрического двигателя 23 транспортера.
При работе устройства датчик (источник сигнала - приемник сигнала) регистрирует только прерывание сигнала (например, луча света).
Выбранная высота установки датчиков обеспечивает прерывание сигнала датчика верхнего ряда при появлении на его пути ноги или туловища животного, а сигнала датчика нижнего ряда - ноги, туловища животного в положении лежа или навоза.
Команда на включение двигателя транспортера для уборки навоза будет сформирована при прерывании сигнала хотя бы с одного приемника нижнего ряда при наличии сигнала с находящегося над ним приемника верхнего ряда. В соответствии с данными логическими условиями структурную формулу цепи формирования команды на включение двигателя транспортера можно представить в виде:
где а и b - коэффициенты, принимающие значение, равное «1» при наличии сигнала с приемника, и равное «0» при отсутствии сигнала;
i - номер приемника сигнала верхнего или нижнего ряда;
n - количество приемников сигнала одного ряда.
Количество приемников сигнала может определяться условием:

где l - длина части клетки, на которой возможно появление навоза;
d - ширина зоны чувствительности датчика, при d≤h;
h - диаметр ноги (копыта) животного.
При отсутствии навоза на полу клетки приемники нижнего ряда получают сигналы и через схемы «И» формируют запрет на прохождение сигналов от соответствующих приемников верхнего ряда. На выходах схем «И» 18-20 будет «0», на выходе схемы «ИЛИ» 21 также «0», команда на включение двигателя сформирована не будет. Если при отсутствии навоза поступление сигнала на приемник нижнего ряда будет прервано ногой или туловищем животного, то при этом будет прервано и прохождение сигнала на находящийся над ним приемник верхнего ряда, изменится значение сигналов на обоих входах соответствующей схемы «И» на противоположное. При этом сигнал на выходе схемы «И» не изменит своего значения, команда на включение двигателя сформирована не будет.
Появление навоза приведет к прерыванию прохождения сигнала с хотя бы одного из приемников нижнего ряда при прохождении сигнала на находящийся над ним приемник верхнего ряда. На вход соответствующей этим приемникам схемы «И» будет поданы сигналы в виде «1», на выходе также появится «1», которая поступит на вход схемы «ИЛИ» 22, сигнал с выхода схемы «ИЛИ» 22, усиленный усилителем 23 поступит на вход электрический двигатель 23, который приведет в движение ленту транспортера.
По мере движения ленты и перемещения навоза будут прерываться сигналы других приемников, и лента транспортера продолжит движение, пока не исчезнет сигнал на выходе схемы «ИЛИ». На этом процесс очистки ленты транспортера 24 с помощью скребка 25 закончится.
Таким образом может быть решена задача немедленного включения ленты транспортера при появлении навоза для ее очистки и своевременного ее выключения при минимальном времени работы устройства.
Использование изобретения позволит:
- улучшить условия содержания животных за счет своевременной очистки пола клеток, в которых содержатся животные,
- сократить долю ручного труда при очистке клеток и улучшить тем самым условия труда работников фермы,
- сократить затраты на очистку клеток за счет минимальной продолжительности их очистки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ УБОРКИ НАВОЗА | 2014 |
|
RU2568682C1 |
| УСТРОЙСТВО ДЛЯ УБОРКИ НАВОЗА ИЗ ЖИВОТНОВОДЧЕСКИХ ПОМЕЩЕНИЙ | 2000 |
|
RU2184445C2 |
| Устройство для содержания животных | 1979 |
|
SU816447A1 |
| Установка для конвейерного содержания животных | 1984 |
|
SU1212386A1 |
| УСТРОЙСТВО ДЛЯ СОДЕРЖАНИЯ ЖИВОТНЫХ | 2003 |
|
RU2236122C1 |
| Модульная кроликоферма | 2024 |
|
RU2832152C1 |
| КОНВЕЙЕРНОЕ СТОЙЛО ДЛЯ ДОЙНЫХ КОРОВ И ОТКОРМА МОЛОДНЯКА | 2004 |
|
RU2275018C2 |
| СПОСОБ КУЛЬТИВИРОВАНИЯ ЛИЧИНОК СИНАНТРОПНЫХ МУХ | 2007 |
|
RU2390126C2 |
| Устройство для уборки навоза | 1990 |
|
SU1741636A1 |
| Автоматический автономный туалет для домашних животных | 2020 |
|
RU2757461C1 |
Изобретение относится к сельскому хозяйству. Предложенное устройство автоматической очистки клетки для содержания животных, в которой пол клетки выполнен в виде транспортера 24, под которым установлен скребок 25 для очистки ленты транспортера, содержит два ряда источников 1-6 сигналов на одной стороне клетки 13, два ряда соответствующих им приемников 7-12 сигналов на другой стороне 14 клетки. Нижний ряд источников 4-6 и приемников 10-12 сигналов установлен непосредственно над уровнем ленты транспортера 24. Верхний ряд источников 1-3 и приемников 7-9 сигналов расположен на 20-40 см выше нижнего ряда. Выход каждого приемника 10-12 сигнала нижнего ряда, смонтированного под приемником 7-9 сигнала верхнего ряда, через инвертор соединен с входом соответствующего ему элемента «И», второй вход которого связан с соответствующим приемником 7-9 сигнала верхнего ряда. Выходы всех схем «И» соединены с входом элемента «ИЛИ», выход которого через усилитель связан с электрическим двигателем транспортера 24. Изобретение обеспечивает улучшение условий содержания животных при уменьшении затрат ручного труда. 2 ил.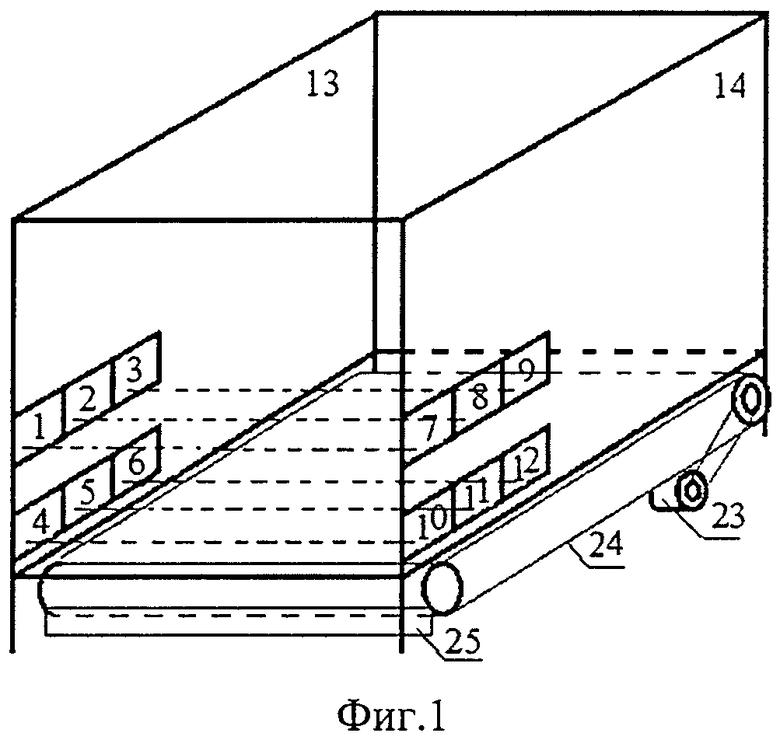
Устройство автоматической очистки клетки для содержания животных, в котором пол клетки выполнен в виде транспортера, под которым установлен скребок для очистки ленты транспортера, отличающееся тем, что с одной стороны клетки установлены два ряда источников сигналов, а с другой стороны клетки - два ряда соответствующих им приемников сигналов, нижний ряд источников и приемников сигналов установлен непосредственно над уровнем ленты транспортера, верхний ряд источников и приемников сигналов установлен на 20-40 см выше нижнего ряда, выход каждого приемника сигнала нижнего ряда, установленного под приемником сигнала верхнего ряда, через инвертор соединен с входом соответствующего ему элемента «И», второй вход которого соединен с соответствующим приемником верхнего ряда, выходы всех схем «И» соединены с входом элемента «ИЛИ», выход которого через усилитель соединен с электрическим двигателем транспортера.
| Способ брикетирования лигнина | 1947 |
|
SU75135A1 |
| Клетка для содержания молодняка животных | 1987 |
|
SU1604285A1 |
| Радиомаяк | 1933 |
|
SU36847A1 |
| US 4011837 A, 15.03.1977. | |||

