Область техники, к которой относится изобретение
Настоящее описание изобретения в целом относится к транспортным средствам с гидростатическим приводом и, в частности, к диагностическим системам и органам управления, контролирующим работу гидравлических контуров, управляющих приведением в движение вышеупомянутых транспортных средств.
Уровень техники
Транспортные средства с гидростатическим приводом обычно содержат гидравлический насос, приводимый в действие двигателем или мотором. Гидравлический насос приводит в движение поток жидкости в одном или многих исполнительных механизмах, обычно в гидравлических моторах, соединенных с колесами иди другими приводными элементами транспортного средства. Поток жидкости из насоса проходит через каждый исполнительный механизм, вызывая перемещение транспортного средства со скоростью перемещения. Оператор, регулируя орган входного управляющего воздействия, например, рычаг, педаль или любое другое подходящее устройство, управляет движением транспортного средства. Когда оператор изменяет положение органа входного управляющего воздействия, генерируется сигнал датчиком смещения, связанным с этим органом входного управляющего воздействия или, в качестве альтернативы, смещением механической связи. Сигнал передается на связанный с транспортным средством контроллер, в котором он интерпретируется, и выдается соответствующая команда на исполнительный механизм, соединенный с гидравлическим насосом, причем исполнительный механизм выполнен с возможностью перемещения рычага управления насосом, позволяющим изменять производительность насоса. В качестве альтернативы, орган входного управляющего воздействия может быть механически соединен с насосом, например, с помощью троса, который вызывает перемещение рычага управления насоса в ответ на смещение органа входного управляющего воздействия.
Смещение рычага управления насосом вызывает изменение производительности насоса через изменение угла работы наклонного диска внутри насоса и, соответственно, изменение давления и расхода жидкости, приводимой в движение через насос. Модуляция расхода жидкости через насос управляет, например, частотой вращения гидравлических моторов, приводящих в движение колеса этого транспортного средства, и следовательно, скоростью перемещения транспортного средства. Дополнительные системы могут быть доступны для управления скоростью перемещения транспортного средства, например, системы торможения или коробки передач могут использоваться для уменьшения скорости транспортного средства, когда это требуется оператору.
Даже если эти виды управления были эффективны в прошлом, они являются недостаточными для недопущения неуправляемого движения транспортного средства при некоторых обстоятельствах, например, когда тяжелыми транспортными средствами, такими как асфальтировочные катки, управляют на поверхностях, размещенных на разных уровнях, или наклонных плоскостях. Недопущение неуправляемого движения транспортного средства желательно не только по соображениям безопасности, но также вследствие того, что работа этого транспортного средства со скоростью, более быстрой или более медленной, чем требуемая, будет непосредственно оказывать воздействие на эксплуатационные параметры, такие как эффективность и скорость уплотнения материала.
Раскрытие изобретения
В настоящем описании изобретения раскрывается в одном аспекте транспортное средство с гидростатическим приводом, имеющее по меньшей мере одно колесо и насос с изменяемой производительностью. Производительность насоса является регулируемой на основе изменения угла поворачивающегося наклонного диска. Поток жидкости, приводимый в движение насосом, протекает по меньшей мере в одном ходовом двигателе, вращающем одно или более колес транспортного средства. Датчик определяет угол вращающегося наклонного диска, который передается на электронный контроллер. Альтернативно, датчик определяет направление и скорость вращения ходового двигателя. Контроллер определяет требуемый сигнал для вращающегося наклонного диска на основании сигнала управления от оператора, сравнивает его с фактическим сигналом от датчика и с порогом и останавливает движение транспортного средства, когда фактический сигнал отличается от требуемого сигнала на заданную величину и в течение заданного промежутка времени.
В другом аспекте в настоящем описании изобретения раскрывается способ управления транспортным средством с гидростатическим приводом, имеющим насос переменной производительности, функционально связанный с ходовым двигателем, приводящим в движение по меньшей мере одно колесо. Способ включает в себя прием от оператора команды в электронном контроллере, связанном с транспортным средством, и сопоставление команды с требуемым углом работы наклонного диска, включенного в насос переменной производительности. Датчик, выдающий результаты измерения, передаваемый в электронный контроллер, измеряет угол работы наклонного диска или, альтернативно, направление и скорость вращения ходового двигателя. Результат измерения сравнивается с требуемым углом для выработки разности, и эта разность сравнивается с порогом. При первом режиме работы, когда разность ниже порога, угол работы наклонного диска регулируется надлежащим образом для уменьшения разности или, альтернативно, для непосредственного управления положением насоса. Во втором режиме работы, когда разность выше порога, таймер, отсчитывающий временной параметр, запускается и выполняет отсчет до тех пор, пока разность выше порога. Когда временной параметр превышает временной предел, движение транспортного средства предполагается неуправляемым и, соответственно, транспортное средство останавливается или заглушается.
В еще одном аспекте в настоящем описании изобретения в целом раскрывается способ управления транспортным средством с гидростатическим приводом, имеющим первичный двигатель, управляющий ходовым насосом переменной производительности. Производительность насоса изменяется в зависимости от угла поворачивающегося наклонного диска, включенного в насос. Поток жидкости, приводимый в движение насосом, передает энергию по меньшей мере одному ходовому двигателю, причем ходовой двигатель функционально соединен по меньшей мере с одним колесом транспортного средства. Управление движением транспортного средства осуществляется органом управления, управляемым пользователем. В соответствии с этим способом угол поворачивающегося наклонного диска определяется с помощью датчика для выработки сигнала угла, который передается на электронный контроллер. Альтернативно, измеряется направление и скорость вращения ходового двигателя, и результат измерения передается на электронный контроллер. Требуемый угол поворачивающегося наклонного диска может определяться на основе сигнала управления и сравниваться с требуемым или ожидаемым режимом работы. После этого движение по меньшей мере одного колеса транспортного средства может замедляться, когда результат измерения отличается от требуемого угла на заданную величину в течение заданного промежутка времени.
Краткое описание чертежей
Фиг.1 - общий вид одного примера транспортного средства с гидростатическим приводом.
Фиг.2 - схема соединений упрощенной гидравлической схемы в соответствии с изобретением.
Фиг.3 - блок-схема системы управления в соответствии с изобретением.
Фиг.4 - блок-схема способа управления транспортным средством с гидростатическим приводом в соответствии с изобретением.
Фиг.5 - схема соединений упрощенной гидравлической схемы в соответствии с альтернативным вариантом выполнения настоящего изобретения.
Фиг.6 - блок-схема системы управления в соответствии с альтернативным вариантом выполнения настоящего изобретения.
Фиг.7 - блок-схема способа управления транспортным средством с гидростатическим приводом в соответствии с альтернативным вариантом выполнения настоящего изобретения.
Осуществление изобретения
Настоящее изобретение относится к транспортным средствам с гидростатическим приводом, и, в частности, к транспортным средствам, имеющим связанные с ними гидравлические системы для осуществления и управления движением транспортного средства. Каждая система содержит по меньшей мере один электронный контроллер, выполненный с возможностью контролировать и предписывать функционирование различных исполнительных механизмов так, чтобы не допустить неуправляемого движения транспортного средства. Описанный здесь вариант выполнения относится к системам, связанным с асфальтирующим катком, только для иллюстрации в качестве примера, хотя настоящее изобретение применимо к любому другому виду транспортного средства с гидростатическим приводом. Поэтому, приведенные здесь примеры не должны истолковываться как ограничения на основе конкретного транспортного средства, описанного здесь в связи с ними, но должны истолковываться как применимые к любому другому транспортному средству, например, к транспортным средствам с задней разгрузкой, колесным транспортным средствам и погрузчикам, грейдерам, гусеничным транспортным средствам, грузовым автомобилям и тракторам для эксплуатации на дорогах и вне дорог и так далее.
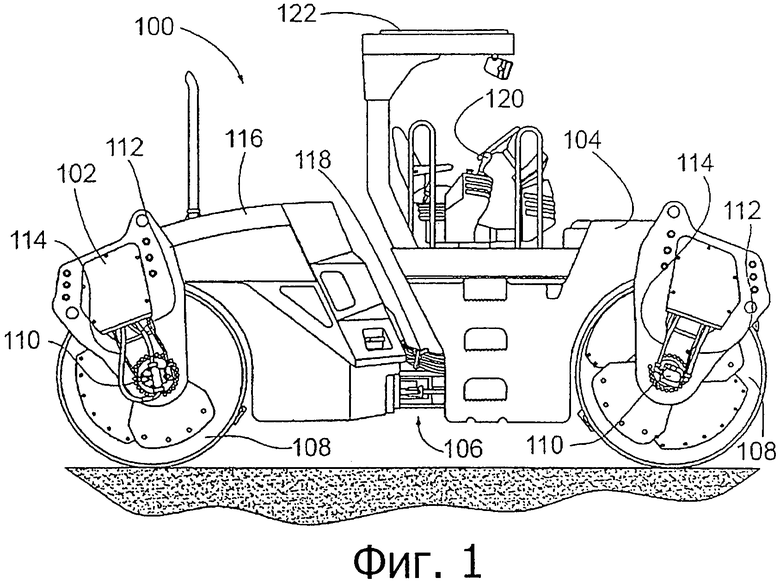
На фиг.1 показан вид сбоку асфальтирующего катка 100. Каток представлен в качестве примера транспортного средства 100, которое содержит раму 102 с двигателем и раму 104 без двигателя, соединенные друг с другом с помощью шарнирного соединения 106. Соединение 106 дает возможность поворотного движения между рамами 102 и 104, что позволяет управлять транспортным средством 100. Каждая рама 102 и 104 содержит одно или более колес, в данном случае в виде валика или валика 108, установленных на них с возможностью вращения. Хотя в настоящем описании говорится о валиках 108, изобретение применимо к колесам колесных транспортных средств в широком смысле. Каждый валик 108 соприкасается с опорной поверхностью и поддерживает транспортное средство 100, позволяя ему двигаться по поверхности. Каждый валик 108 способен к вращению под действием гидравлического мотора 110, установленного для приема потока жидкости либо из первой линии или трубки 112, либо из второй линии или трубки 114. Каждый мотор 110 может управлять соответствующим валиком 108 в любом направлении, зависящем от направления потока через первую или вторую трубку 112 или 114.
Поток жидкости через первую и вторую трубку 112 и 114 приводится в движение насосом (не показан на фиг.1), управляемым двигателем 116. Этот двигатель 116 и насос смонтированы на раме 102 с двигателем и являются частью гидравлической системы, проходящей по всей длине транспортного средства. Промежуточные линии или трубки 118 соединяют раму 102 с двигателем с рамой 104 без двигателя для обеспечения сообщения гидравлической жидкости между ними. Насос представляет собой насос переменной производительности, производительность которого регулируется органом или рычагом 120 управления. Рычаг 120 управления располагается в кабине 122 транспортного средства 100, предназначенной для размещения оператора во время работы.
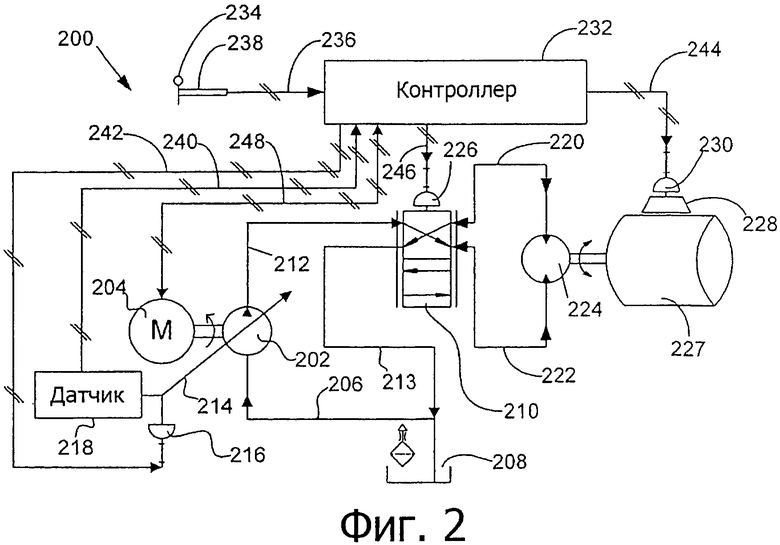
Упрощенная схема соединений гидравлической системы 200, содержащей электрические органы управления, показана на фиг.2. Система 200, показанная упрощенно в целях иллюстрации, содержит участок схемы управления приводом для приведения в движение одного из валиков 108 транспортного средства 100. Как можно понять, гидравлические компоненты и соединения для приведения в движение второго калика 108 или вибраторов (не показаны) внутри каждого валика 108 не показаны ради упрощения. Похожие гидравлические компоненты и соединения могут предусматриваться в альтернативных транспортных средствах с гидростатическим приводом для выполнения операций таких как, только для примера, подъем и/или наклон навесного оборудования.
Гидравлическая система 200 включает в себя насос 202 переменной производительности, соединенный с первичным двигателем, в данном случае с двигателем 204 транспортного средства. Насос 202 имеет впускную трубку 206 ввода, соединенную с гидробаком или стоком 208. Когда двигатель 204 работает, насос 202 вытягивает поток жидкости из резервуара 208 так, что в ней повышается давление перед ее передачей в четырехпутевой двухходовой (4-2) распределитель 210 через линию или трубку 212 подачи. Сливное отверстие распределителя 210 соединено посредством сливной трубки 213, по которой осуществляется слив, с резервуаром 208. Рычаг 214 управления соединен с наклонным диском (не показан) внутри насоса 202 и выполнен с возможностью изменения угла наклонного диска в ответ на перемещение рычага 214 управления. Перемещение рычага 214 управления выполняется через исполнительный механизм 216, соединенный с рычагом 214 управления. Смещение или угол рычага 214 управления, который эквивалентен углу наклонного диска насоса 202, может быть определен или измерен датчиком 218. Этот датчик 218 может быть, например, аналоговым или цифровым датчиком, измеряющим угол (или, что эквивалентно, смещение) рычага 214 управления и, таким образом, положение наклонного диска внутри насоса 202.
Как можно понять, функция насоса 202 состоит в проталкивании потока жидкости через линию 212 подачи, когда работает двигатель 204. В зависимости от позиции 4-2 распределителя 210 поток жидкости из линии 212 подачи направляется в одну из двух трубок - в первую трубку 220 иди во вторую трубку 222, которые подключены соответственно к одной из двух сторон гидравлического мотора 224. Позицией 4-2 распределителя 210 управляет исполнительный механизм 226 распределителя, установленного для переключения 4-2 распределителя 210 между двумя позициями, вызывая перемещение мотора 224 в требуемом направлении. Мотор 224 соединен с колесом или валиком 227 транспортного средства и выполнен с возможностью вращения валика 227, когда транспортное средство движется. Тормоз 228, показанный схематично, выполнен с возможностью прекращения или замедления движения валика 227, когда его приводят в действие исполнительным механизмом 230. Тормозной исполнительный механизм 230, показанный в этом варианте выполнения, является электронным и приводит в действие тормоз 228, вызывая трение, которое останавливает движение валика 227, но могут быть использованы другие конструкции. Например, штырь может быть вставлен в отверстие вращающегося диска, соединенного с валиком 227, так чтобы движение диска и валика 227 относительно штыря прекращалось и так далее. Кроме того, тормоз 228 показан внешним относительно валика 227 для иллюстрации, но могут использоваться более традиционные конструкции, например, в которых тормоз 228 спрятан внутри валика 227.
Электронный контроллер 232 подключен к транспортному средству и установлен для приема информации от различных датчиков на транспортном средстве, обработки этой информации и выдачи команд на различные исполнительные механизмы в системе во время работы. Показаны соединения, имеющие отношение к настоящему описанию, но как можно понять, может иметься большое количество других соединений, относящихся к контроллеру 232. В этом варианте выполнения, контроллер 232 соединен с органом 234 входного управляющего воздействия через линию 236 сигнала управления. Орган 234 входного управляющего воздействия, показанный схематически, может быть, например, рычагом, способным перемещаться с помощью оператора транспортного средства и используемым для установки требуемой скорости транспортного средства. Положение органа 234 входного управляющего воздействия может быть переведено в командный сигнал посредством датчика 238, связанного с органом 234 входного управляющего воздействия. Сигнал управления, переданный на контроллер 232, может быть использован при вычислении вместе с другими параметрами, например, частотой вращения двигателя 204, температурой жидкости в резервуаре 208 и так далее, чтобы выдать требуемый угол или сигнал для наклонного диска, который вызывает перемещение транспортного средства с требуемой скоростью.
Датчик 218 соответствующим образом подключен к контроллеру 232 через линию 240 обратной связи параметров насоса и выполнен с возможностью приема положения или фактического сигнала с датчика 218, характеризующего положение, параметры или угол наклонного диска в насосе 202. Контроллер 232 также выполнен с возможностью выдачи команд, управляющих различными исполнительными механизмами в системе 200. Например, линия 242 передачи команд производительности насоса может соединять контроллер 232 с исполнительным механизмом 216, управляющим рычагом 214 управления. Аналогично, линия 244 активации тормоза может соединять контроллер 232 с исполнительным механизмом 230 тормоза, так что при наличии соответствующего сигнала в линии 244 активации тормоза тормоз 228 может входить в зацепление для остановки или замедления движения валика 227 относительно данного транспортного средства. Кроме того, линия 246 управления может соединять контроллер 232 с исполнительным механизмом 226 распределителя, так чтобы оператор мог задавать направление вращения и, таким образом, продвижение транспортного средства на основе позиции 4-2 распределителя 210. Как правило, направление движения транспортного средства зависит от направления смещения органа 234 входного управляющего воздействия относительно нейтрального положения. Наконец, контроллер 232 может быть выполнен с возможностью передачи и приема множества других параметров на двигатель 204 и от двигателя через многоканальную линию 248 связи с двигателем. Такие параметры могут включать, например, различные эксплуатационные параметры двигателя 204, такие как частота вращения двигателя и запас топлива, а также другие параметры, относящиеся к рабочему состоянию двигателя 204, такие как температура смазочно-охлаждающей жидкости, температура масла, температура воздуха, коды неисправности элементов и так далее.
Когда оператор управляет движением транспортного средства путем изменения положения органа 234 входного управляющего воздействия, командный сигнал передается в контроллер 232 через линию 236 ввода команд. Этот сигнал, как более подробно описано ниже, заставляет исполнительный механизм 216 насоса перемещать рычаг 214 управления в соответствующей степени до достижения требуемого угла. Требуемый угол рычага 214 управления, который преобразуется в требуемый параметр наклонного диска насоса 202, вызывает соответствующий поток движущей жидкости через мотор 224, что приводит к вращению валика 227, обеспечивая требуемую скорость перемещения транспортного средства.
Даже если такая компоновка органов управления автомобиля работает хорошо в большинстве ситуаций, существуют определенные условия, при которых транспортное средство может быть склонно к движению, отличному от движения, заданного оператором. Когда возникают такие редкие условия, например, когда транспортное средство поднимается или спускается по крутой наклонной плоскости, валик 227 может начать вращаться быстрее или в противоположном направлении чем то, которое было задано оператором. В такой ситуации мотор 224 действует скорее как насос, поскольку вызывает изменение расхода или направления потока жидкости в первой и второй трубках 220 и 222. Вследствие большого веса транспортного средства, это изменение в характеристиках потока может вызвать изменение в позиции 4-2-путевого распределителя 210 и может даже вызвать изменение угла наклонного диска в насосе 202 и создание новых незаданных условий для потока. Когда такое поведение демонстрируется транспортным средством, желательно остановить или замедлить это транспортное средство, предупредить оператора и предоставить возможность оператору восстановить управление. Это может быть выполнено через соответствующие функциональные возможности, закодированные в контроллере 232, как описано ниже.
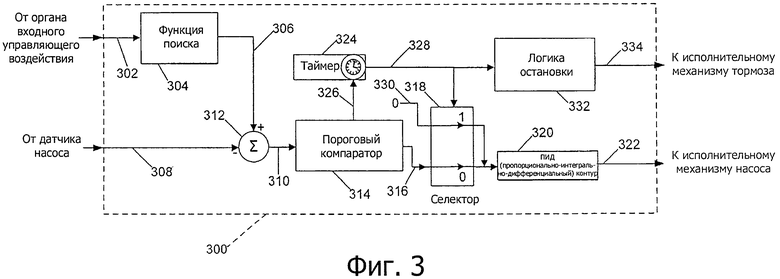
Блок-схема системы 300 управления, способная обнаружить и смягчить незаданное движение транспортного средства с гидростатическим приводом, показана на фиг.3. Эта система управления 300 или эквивалентной может преимущественно быть закодирована в контроллере 232, описанном выше в связи с фиг.2, так чтобы незаданное движение транспортного средства распознавалось во время работы и прекращался, позволяя оператору восстановить управление. Система 300 принимает команду 302 для требуемой скорости транспортного средства или, что эквивалентно, требуемый сигнал для насоса 202, возникший при смещении оператором органа 234 входного управляющего воздействия. Команда 302 может пройти через функцию 304 поиска, где она может быть сопоставлена с требуемым углом 306 наклонного диска. Одновременно сигнал 308 обратной связи, например, измеренный или фактический угол рычага 214 управления, от датчика 218, встроенного в насос 202, поступает в контроллер 232.
Система 300 управления может вычислять разность или ошибку 310 между требуемым сигналом 306 и фактическим сигналом 308 в суммирующем блоке 312, и сравнить эту ошибку с набором пороговых значений в функции 314 компаратора. Ошибка 310 показывает разность между требуемыми сигналами 306 и фактическими сигналами 308 наклонного диска в насосе 202, которая преобразуется в разность между требуемой и фактической скоростями транспортного средства. Величина этой ошибки является признаком различия между заданным и фактическим движением транспортного средства. Эта ошибка обычно присутствует в течение короткого времени и имеет значение, уменьшающееся со временем, так как отклик системы стремится соответствовать командам во время обычной работы.
Пороговый компаратор 314 может работать непрерывно во время работы по контролю ошибок между требуемым сигналом 306 и фактическим сигналом 308 на предмет ненормальных условий или в целом на предмет колебаний значений ошибки, которые указывают на потенциальную проблему. Пороговый компаратор 314 может непрерывно сравнивать величину и направление ошибки 310 с заданными постоянными или переменными верхним и нижним порогами. Пороговый компаратор 314 может либо направлять ошибку 310 в неизменном виде, когда ошибка не превышает порогов, либо усекать ошибку 310 для удаления временных выбросов, которые могут случаться во время внезапных изменений в командах от оператора. Неизменное или усеченное значение 316 ошибки, выходя из порогового компаратора 314, проходит через селекторный переключатель 318 перед поступлением на алгоритм динамического управления. В этом варианте выполнения показано, что алгоритм динамического управления является контуром 320 пропорционально-интегрально-дифференциального (ПИД) регулирования, но могут использоваться другие типы контроллеров, например, функции моделирования, модели, адаптивные алгоритмы и так далее. ПИД контур 320 способен вычислять и отправлять регулировки 322 на исполнительный механизм 216 насоса, стремясь привести фактический угол наклонного диска насоса 202 ближе к требуемому углу.
В ситуациях, когда транспортное средство не выполняет в точности команды на выполнение движения, например, в ситуациях, когда транспортное средство движется по крутому склону или когда транспортное средство скользит по опорной поверхности так, что требуемая скорость не соответствует фактической скорости, ПИД контур может стать неэффективным в управлении движением этого транспортного средства. В таких ситуациях предпочтительно блокировать ПИД контур 320 или любую другую похожую схему управления для предотвращения «взвинчивания» в любом таком контроллере 232 и блокировать движение транспортного средства, используя другие способы, как описано ниже.
Когда во время работы ошибка превышает пороговое значение, пороговый компаратор 314 выполнен с возможностью активации таймера 324 посредством значения 326 флага порога. Когда компаратор 314 определяет, что ошибка 310 превышает порог, флаг 326 активизируется, запуская таймер 324, который начинает отсчитывать время после того, как ошибка превысила порог, прибавляя значение времени. Таймер 324 может прибавлять значение времени вплоть до заданного значения времени, пока ошибка выше порога, а флаг 326 активирован. Если ошибка 310 превышает порог в течение по меньшей мере заданного времени, то есть флаг 326 активен все то время, пока значение времени отсчитывается до заданного значения времени, и заданное значение времени достигнуто, таймер 324 активизирует флаг 328 неисправности. Активация флага 328 неисправности может выполняться, например, путем изменения значения флага 328 неисправности с нуля на единицу.
Активация флага 328 неисправности вызывает прекращение движения транспортного средства. Например, флаг 328 неисправности вызывает изменение положения селекторного переключателя 318 и направить нейтрализующее значение 330, например, ноль вместо усеченной ошибки 316 в ПИД контур 320. Ввод нейтрализующего значения 330 в ПИД контур 320 вызывает быстрое «успокоение» ПИД контура 320 и прекращение посылки команд на насос, в результате чего насос принимает нейтральное положение или положение с нулевым углом. Одновременно флаг 328 неисправности активирует функцию 332 торможения, которая направлена на автоматическую остановку транспортного средства путем активации тормозов 228 транспортного средства посредством подачи сигнала 334 торможения на исполнительный механизм 230 торможения. Флаг неисправности может дополнительно выполнять другие функции, например, предупреждать оператора об аварийном состоянии, издавать звук сирены или аварийного сигнала, перемещать коробку передач в нейтральное положение, выключать двигатель транспортного средства и так далее.
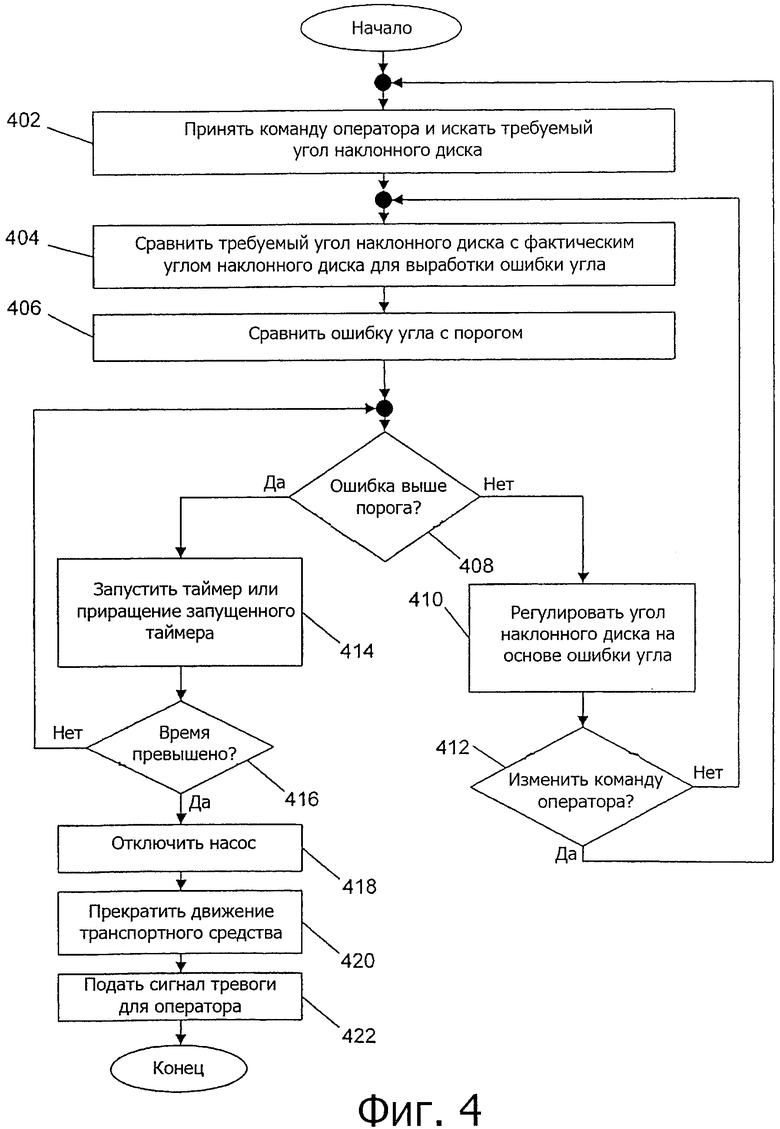
Блок-схема примерного способа прекращения незаданного движения транспортного средства с гидростатическим приводом показана на фиг.4. На этапе 402 контроллер 232, встроенный в транспортное средство, может принимать команду оператора и, основываясь на этой команде, вычислять или интерполировать требуемый угол для наклонного диска насоса 202, приводя в движение жидкость, управляющую моторами 224 транспортного средства. На этапе 404 требуемый угол или эквивалентный параметр сравнивается с фактическим углом насоса 202, например, измеренным надлежащим образом установленным датчиком 218, для выдачи разности или ошибки. Эта ошибка сравнивается с порогом на этапе 406 для определения на этапе 408, превышает ли ошибка пороговое значение.
Если на этапе 408 определено, что ошибка находится ниже порога на этапе 410, работа продолжается в нормальном, или первом, режиме с регулировкой угла наклонного диска. Такая регулировка может обеспечиваться, например, путем использования ПИД контура 320 или другой схемы управления, действующей для выполнения регулировок угла на основе разности или ошибки, предварительно вычисленной на этапе 404. На этапе 412 определяются изменения в команде оператора, и процесс повторяется, начиная с определения требуемого угла на этапе 402, если имеются изменения в команде, или со сравнения на этапе 404, если изменений нет.
С другой стороны, если на этапе 408 определено, что ошибка превышает порог, то работа продолжается во втором режиме работы путем запуска таймера 324 на этапе 414. Таймер 324, запущенный на этапе 414, может быть, например, таймером приращений, ведущим счет вплоть до заданного порога или предела времени. Определение на этапе 416, достигнут ли временной порог или предел, вызывает приращение таймера до тех пор, пока ошибка остается выше порога на этапе 408. Таймер 324 продолжает считать время с тех пор, как определено, что ошибка превышает порог, до тех пор, пока есть ошибка. Когда таймер достигает временного предела на этапе 416 и когда ошибка остается выше порога на этапе 408, контроллер насоса отключается на этапе 418. Отключение контроллера насоса может обеспечиваться, например, путем посылки значения отключения на ПИД контур, как описано выше, при этом на этапе 420 движение транспортного средства замедляется или прекращается, а на этапе 422 оператор предупреждается о наличии неисправного состояния.
Упрощенная блок-схема альтернативного варианта выполнения гидравлической системы 500, содержащей электрические органы управления, показана на фиг.5. Система 500, упрощенно показанная в целях иллюстрации, включает в себя участок схемы управления для приведения в движение одного из валиков 108 транспортного средства 100. Гидравлическая система 500 содержит насос 502 переменной производительности, соединенный с первичным двигателем, в данном случае с двигателем 504 транспортного средства. Насос 502 является двунаправленным насосом, который способен управлять гидравлическим мотором или другим гидравлическим устройством в двух направлениях. Когда двигатель 504 работает, рычаг 514 управления, соединенный с наклонным диском (не показан) внутри насоса 502, выполнен с возможностью изменения угла наклонного диска в двух направлениях в ответ на движение рычага 514 управления. Движение рычага управления 514 выполняется исполнительным механизмом 516, соединенным с рычагом 514 управления. Смещение или угол рычага 514 управления управляет направлением и расходом гидравлической жидкости, подаваемой на двунаправленный ходовой двигатель 524. Частота вращения и направление вращения двигателя 524 хода можно определять или измерять с помощью датчика 518. Датчик 518 может быть, например, аналоговым или цифровым датчиком, измеряющим направление и частоту вращения ходового двигателя 524.
Как можно понять, при работе двигателя 504 насос 502 толкает поток жидкости либо через первую линию 512 подачи, либо вторую линию 506 подачи в зависимости от направления поворота наклонного диска в моторе 502. Мотор 524 соединен с колесом или валиком 527 транспортного средства и выполнен с возможностью вращать валик 527, когда транспортное средство движется. Тормоз 528, показанный схематически, выполнен с возможностью прекращения или замедления движения валика 527, когда его приводит в действие исполнительный механизм 530. Тормозной исполнительный механизм 530, показанный в этом варианте выполнения, является электронным и приводит в действие тормоз 528, вызывая трение для прекращения движения валика 527, но могут быть использованы другие конструкции. Первый клапан 522 сброса давления обеспечивает сообщение первой линии 512 подачи со стоком или резервуаром 508. Аналогично, второй клапан 513 сброса давления обеспечивает сообщение второй линии 506 подачи со стоком 508.
Электронный контроллер 532 соединен с транспортным средством и выполнен с возможностью приема информации от различных датчиков на транспортном средстве, обработки этой информации и выдачи команд на различные исполнительные механизмы в системе во время работы. В данном альтернативном варианте выполнения контроллер 532 соединен с органом 534 входного управляющего воздействия через линию 536 сигнала управления. Орган 534 входного управляющего воздействия, показанный схематически, может быть, например, рычагом, приводимым в движение оператором транспортного средства и используемым для установки требуемой скорости транспортного средства. Положение органа 534 входного управляющего воздействия может быть преобразовано в командный сигнал при помощи датчика 538, связанного с органом 534 входного управляющего воздействия. Этот сигнал управления, переданный на контроллер 532, может использоваться для подачи требуемого сигнала на наклонный диск, который вызывает перемещение транспортного средства с требуемой скоростью и в требуемом направлении.
Датчик 518 надлежащим образом соединен с контроллером 532 через линию 540 обратной связи мотора и выполнен с возможностью приема фактического сигнала от датчика 518, показывающего направление и частоту вращения мотора 524. Контроллер 532 также выполнен с возможностью выдачи команд, управляющих различными исполнительными механизмами в системе 500. Например, линия 542 передачи команд производительности насоса может соединять контроллер 532 с исполнительным механизмом 516, управляющим рычагом 514 управления. Аналогично, линия 544 активации тормоза может соединять контроллер 532 с исполнительным механизмом 530 тормоза, так, чтобы при наличии соответствующего сигнала в линии 544 активации тормоза тормоз 528 можно было задействовать для прекращения или замедления движения валика 527 относительно транспортного средства. Контроллер 532 может быть также выполнен с возможностью передачи и приема множества других параметров на двигатель 504 или от двигателя 504 через многоканальную линию 548 связи двигателя. Такие параметры могут включать, например, различные эксплуатационные параметры двигателя 504, такие как частота вращения двигателя или запас топлива, а также другие параметры, относящиеся к эксплуатационному состоянию двигателя 504, такие как температура смазочно-охлаждающей жидкости, температура масла, температура воздуха, коды неисправности элементов и так далее.
Когда оператор подает команду на движение транспортного средства путем изменения положения органа 534 входного управляющего воздействия, командный сигнал передается в контроллер 532 через линию 536 ввода команд. Этот сигнал побуждает исполнительный механизм 516 насоса двигать рычаг 514 управления на соответствующую величину и в соответствующем направлении для достижения требуемого эксплуатационного параметра. Требуемый угол рычага 514 управления, который преобразуется в требуемый сигнал для наклонного диска насоса 502, вызывает соответствующий поток движущей жидкости через мотор 524, что приводит к вращению валика 527, который обеспечивает требуемую скорость движения транспортного средства. Управление направлением и величиной смещения рычага 514 управления в этом варианте выполнения достигается в режиме без обратной связи на основе командного сигнала из линии 536 ввода команд.
Даже если такая компоновка органов управления автомобиля работает хорошо в большинстве ситуаций, существуют определенные условия, при которых транспортное средство может быть склонно к движению, отличному от движения, заданного оператором. Как дополнительный пример, исполнительный механизм 516, управляющий рычагом 514 управления насоса 502, может становиться медленным или заедающим из-за проникновения примесей и посторонних частиц. В такой ситуации исполнительный механизм 516 может принимать положение, которое не задано оператором транспортного средства, вызывая неуправляемое движение наклонного диска насоса 502. Когда такое необычное состояние имеет место, валик 527 может начать вращаться быстрее или в направлении противоположном тому, которое было задано оператором. Когда такая ситуация имеет место, желательно прекратить или замедлить движение этого транспортного средства путем автоматического применения тормоза 528.
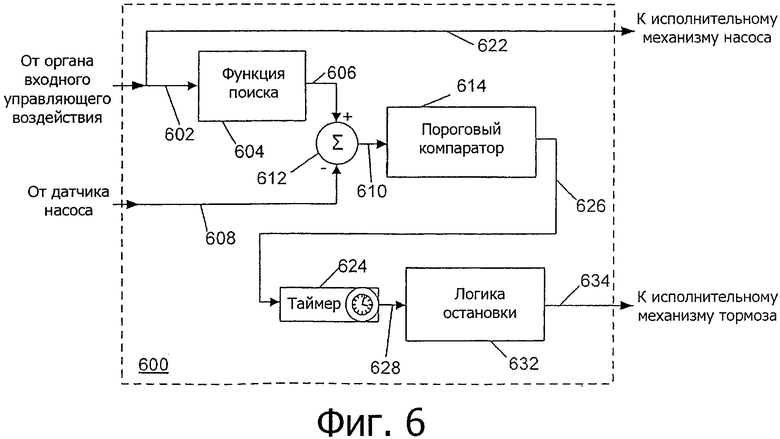
Блок-схема системы 600 управления, способной обнаружить и смягчить незаданное движение транспортного средства с гидростатическим приводом, показана на фиг.6. Система 600 управления или эквивалентная ей может преимущественно быть закодирована в контроллере 532, описанном выше в связи с фиг.5, так, чтобы можно было распознать и прекратить незаданный режим транспортного средства. Система 600 принимает команду 602 на требуемое перемещение транспортного средства или, что эквивалентно, требуемое направление и параметр для насоса 502 от перемещения оператором органа 534 входного управляющего воздействия. Команда 602 может непосредственно поступать на исполнительный механизм насоса в качестве сигнала 622 управления, например, на исполнительный механизм 516, и может также поступать через функцию 604 поиска, где она может быть сопоставлена с требуемым параметром 606 для насоса 502. Требуемый параметр 606 для насоса 502 может быть действительным или целым значением, имеющим знак, указывающий направление, и величину, указывающую требуемую скорость или расход. Одновременно сигнал обратной связи или фактический сигнал 608, например, направление и скорость мотора 524, например, измеренные встроенным датчиком 518 поступают на контроллер 600.
Система 600 управления может вычислить разность или ошибку 610 между требуемым сигналом 606 и фактическим сигналом 608 в блоке 612 суммирования, и сравнить ошибку с набором пороговых значений в функции 614 компаратора. Ошибка 610 служит признаком различия между требуемыми сигналами 606 и фактическими сигналами 608 наклонного диска в насосе 502, и ее можно преобразовать в разность между требуемой и фактической скоростями транспортного средства. Величина этой ошибки служит признаком несоответствия между заданным и фактическим движением транспортного средства.
Пороговый компаратор 614 может работать непрерывно во время работы по контролю ошибки между требуемым сигналом 606 и фактическим сигналом 608 на предмет ненормальных условий или в целом на предмет колебаний ошибочных значений, которые служат признаком потенциального незаданного движения. Когда во время работы ошибка превышает пороговое значение или, более определенно, абсолютное значение ошибки превышает порог, пороговый компаратор 614 выполнен с возможностью запуска таймера 624 посредством значения 626 флага порога. Когда компаратор 614 определяет ошибку 610, превышающую порог, флаг 626 активизируется, запуская таймер 624, который начинает счет времени с того момента, как ошибка превысила порог, путем приращения временного значения. Таймер 624 может давать приращение временного значения до достижения заданного времени, пока ошибка выше порога, а флаг 626 активирован. Если ошибка 610 превышает порог в течение по меньшей мере заданного времени, то есть флаг 626 является активным во время счета временного значения вплоть до заданного времени и заданное время достигнуто, тогда таймер 624 активирует флаг 628 неисправности. Активизация флага 628 неисправности может быть выполнена, например, с помощью изменения значения флага 628 неисправности с нуля на единицу.
Активизация флага 628 неисправности приводит к остановке транспортного средства. Флаг неисправности 628 активирует функцию 632 торможения, которая автоматически останавливает транспортное средство путем активации тормозов 528 транспортного средства по сигналу 634, поданному на исполнительный механизм 530 тормоза. Флаг неисправности может дополнительно выполнять другие функции, например, предупреждать оператора об аварийном состоянии, издавать звук сирены или аварийный сигнал, перемещать коробку передач в нейтральное положение, выключать двигатель транспортного средства и так далее.
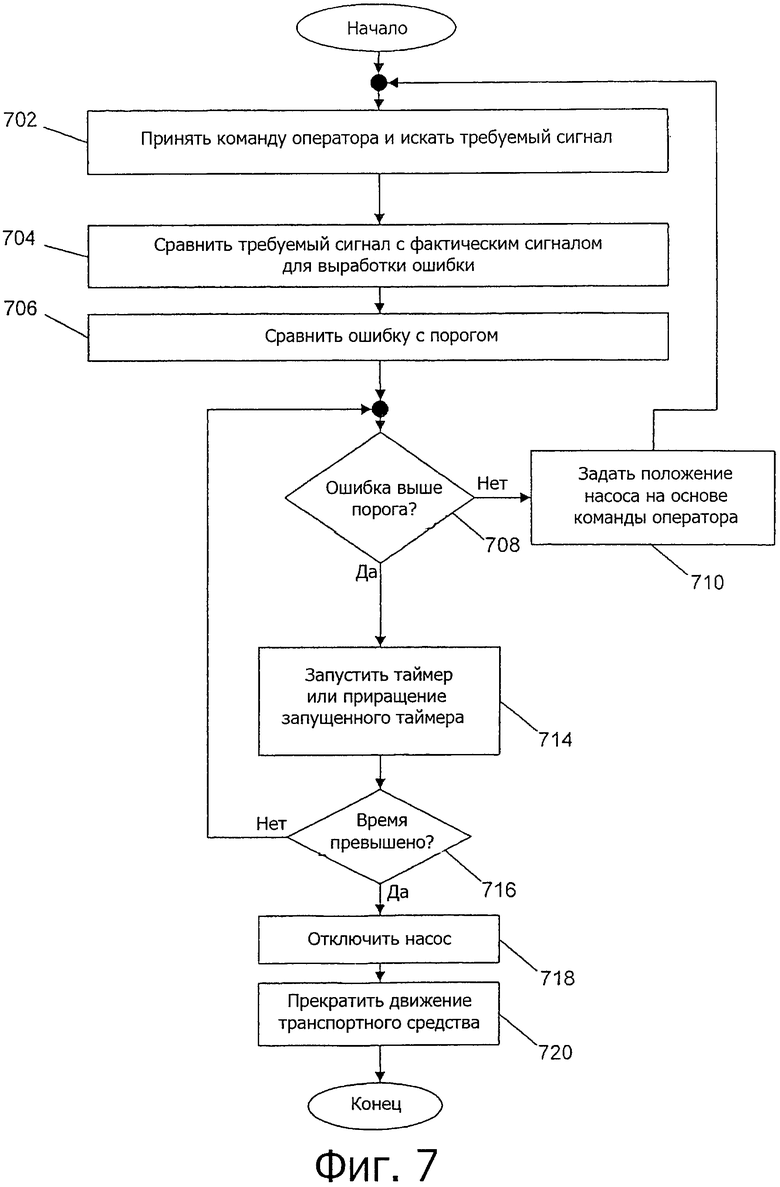
Блок-схема альтернативного способа прекращения незаданного движения торможением транспортного средства с гидростатическим приводом показана на фиг.7. На этапе 702 контроллер 532 интегрированный с транспортным средством, может принимать команду оператора и, основываясь на этой команде, вычислять или интерполировать требуемый сигнал, указывающий, например, требуемый угол для наклонного диска насоса 502, приводящего в движение жидкость, управляющую моторами 524 транспортного средства. На этапе 704 требуемый сигнал или эквивалентный параметр сравнивается с фактическим сигналом, указывающим направление и частоту вращения мотора 524, например, измеренным соответствующим образом расположенным датчиком 518, для выработки разности или ошибки. Эта ошибка сравнивается с порогом на этапе 706 для определения на этапе 708, превышает ли ошибка значение порога.
Если ошибка, определенная на этапе 708, не превышает порог, то на этапе 710 работа продолжается в нормальном, или первом, режиме с помощью команды без обратной связи для угла наклонного диска, основанной на команде оператора. С другой стороны, если на этапе 708 было определено, что ошибка превышает порог, то на этапе 714 работа продолжается во втором режиме путем запуска таймера. Таймер 624, запущенный на этапе 714, может быть, например, таймером приращений, считающим вплоть до достижения заданного порога или предела времени. Определение на этапе 716, достигнут ли временной порог или предел, вызывает приращение таймера до тех пор, пока ошибка остается выше порога на этапе 708. Таймер 624 продолжает считать время, с тех пор, как было определено, что ошибка превышает порог, до тех пор, пока есть ошибка. Когда на этапе 716 таймер достигает временного предела и при этом на этапе 708 ошибка остается выше порога, контроллер насоса на этапе 718 отключается и на этапе 720 движение транспортного средства замедляется или прекращается на 720.
Промышленная применимость
Настоящее изобретение применимо к транспортным средствам с гидростатическим приводом, имеющим электронные контроллеры, способные управлять производительностью ходового насоса или насосов, связанных с транспортным средством. Незаданное движение транспортного средства может происходить при некоторых обстоятельствах. Варианты выполнения, описанные здесь, подходят для обнаружения незаданного движения транспортного средства, например, движения транспортного средства со скоростью отличной от заданной скорости или движения в направлении отличном от заданного направления. Описанные варианты выполнения предпочтительно могут также прекращать движение транспортного средства и могут предупреждать оператора о возникшей неисправности. Варианты выполнения, описанные здесь, описаны в целях иллюстрации в рамках способов и устройств, используемых для распознавания состояния незаданного движения, а также для движения с торможением транспортного средства, если такое состояние имеет место в течение большего времени, чем заданный предел времени. Следует понимать, что имеется несколько альтернативных способов для остановки транспортного средства, а также для управления насосом, отличных от тех, которые описаны здесь, и что любые такие эквивалентные способы считаются в пределах объема настоящего изобретения.
Следует принять во внимание, что предшествующее описание содержит примеры раскрытой системы и способов. Однако можно себе представить, что другие варианты выполнения этого изобретения могут отличаться в деталях от вышеприведенных примеров. Все ссылки на описание изобретения или примеры из него, предназначены для ссылки на конкретный рассматриваемый пример и не предназначаются для того, чтобы накладывать какие-либо ограничения, например, на объем изобретения в целом. Формулировки, характеризующие достоинства и недостатки определенных признаков, направлена на то, чтобы показать отсутствие предпочтения в отношении этих признаков, но не для их исключения из объема изобретения полностью, если иное не указано.
Перечисление диапазонов значений предназначено исключительно для того, чтобы служить в качестве сокращенного способа указания по отдельности каждого отдельного значения, попадающего в пределы этого диапазона, если только не указано иное, причем каждое отдельное значение включено в описание, как если бы оно было отдельно приведено. Все способы, описанные здесь, могут выполняться в любом удобном порядке, если не указано иное или иное явно не противоречит контексту.
Соответственно, настоящее изобретение включает в себя все модификации и эквиваленты объекта изобретения, приведенного в прилагаемой формуле изобретения, которые разрешены соответствующим законодательством. Кроме того, любая комбинация вышеупомянутых элементов во всех возможных вариантах охватывается изобретением, если не указано иное или иное явно не противоречит контексту.
Изобретение предназначено для использования на асфальтировочных транспортных средствах. При управлении средством с гидростатическим приводом измеряют частоту и направление вращения ходового мотора (524) при помощи датчика (518) для получения фактического сигнала. Передают фактический сигнал на электронный контроллер (532). Вырабатывают сигнал (536) управления на основании входного сигнала от органа (534) управления, регулируемого пользователем. Определяют требуемый сигнал для поворачивающегося наклонного диска на основании сигнала (536) управления от органа (534) управления, регулируемого пользователем. Требуемый сигнал вызывает перемещение транспортного средства с требуемой скоростью и в требуемом направлении. Сравнивают фактический сигнал с требуемым сигналом в электронном контроллере (532). Запускают таймер, когда фактический сигнал отличается от требуемого сигнала. Прекращают движение колеса (527), когда временное значение, увеличившееся в таймере, по меньшей мере, равно указанному заданному промежутку времени. Достигается повышение безопасности, эффективность и скорость уплотнения материала. 2 н. и 11 з.п. ф-лы, 7 ил.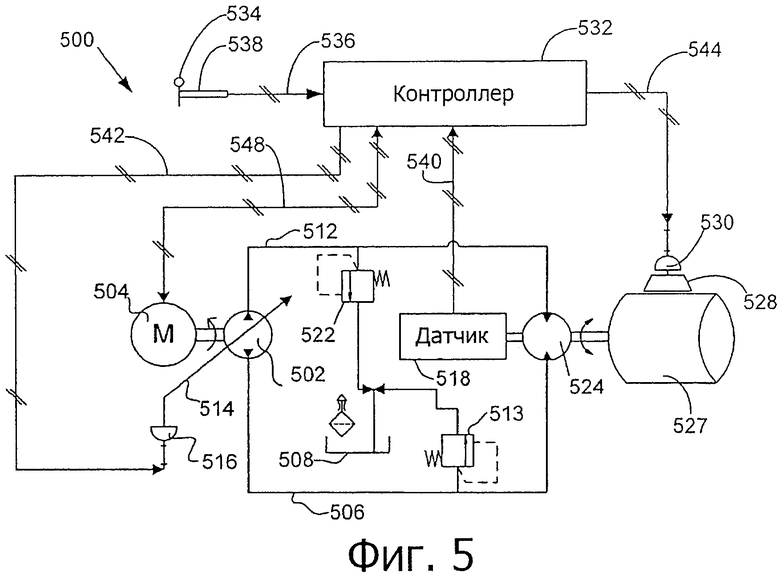
1. Способ управления транспортным средством (100) с гидростатическим приводом, содержащим первичный двигатель (204), управляющий ходовым насосом (202) переменной производительности, причем производительность насоса (202) изменяется в зависимости от угла (302) поворота наклонного диска (214), содержащегося в насосе (202), при этом поток жидкости приводится в движение насосом (202), управляющим передачей мощности, по меньшей мере, одному ходовому мотору (224), причем ходовой мотор (224) функционально соединен по меньшей мере с одним колесом (227) транспортного средства (100), при этом движение транспортного средства (100) регулируется органом (234) управления, регулируемым пользователем, причем способ содержит этапы, на которых: измеряют частоту и направление вращения ходового мотора при помощи датчика (518) для получения фактического сигнала (308, 608); передают фактический сигнал (308, 608) на электронный контроллер (232); вырабатывают сигнал (236, 536) управления на основании входного сигнала от органа (234, 534) управления, регулируемого пользователем; определяют требуемый сигнал (306, 606) для поворачивающегося наклонного диска (214) на основании сигнала (236) управления от органа (234) управления, регулируемого пользователем; при этом требуемый сигнал вызывает перемещение транспортного средства с требуемой скоростью и в требуемом направлении;
сравнивают фактический сигнал (308, 608) с требуемым сигналом (306, 606) в электронном контроллере (232, 300); запускают таймер (324), когда фактический сигнал (308, 608) отличается от требуемого сигнала (306, 606), и прекращают движение, по меньшей мере, одного колеса (227), когда временное значение, увеличившееся в таймере (324), по меньшей мере, равно указанному заданному промежутку времени.
2. Способ по п.1, в котором сравнение фактического сигнала (308, 608) с требуемым сигналом (306, 606) включает в себя вычисление разности (310) между требуемым сигналом (306, 606) и фактическим сигналом (308, 608) и сравнение разности (310) с пороговым значением (314).
3. Способ по любому из пп.1 или 2, в котором определение требуемого сигнала (306, 606) выполняется функцией (304) поиска, устанавливающей соответствие между сигналом (302) управления и требуемым сигналом (306, 606).
4. Способ по п.1, дополнительно содержащий этап, на котором отключают контроллер (300), управляющий изменением угла поворачивающегося наклонного диска (214), содержащегося в насосе (202), когда фактический сигнал (308, 608) отличается от требуемого сигнала (306, 606) на заданную величину в течение заданного промежутка времени.
5. Способ по любому из пп.1 или 2, в котором прекращение движения, по меньшей мере, одного колеса (227) транспортного средства (100) включает в себя применение механизма (228) торможения для прекращения движения, по меньшей мере, одного колеса (227) транспортного средства (100), когда фактический сигнал (308, 608) отличается от требуемого сигнала (306, 606) на заданную величину в течение заданного промежутка времени.
6. Способ по п.1, дополнительно содержащий этап, на котором активируют флаг (328) неисправности, когда фактический сигнал (308, 608) отличается от требуемого сигнала (306, 606) на заданную величину в течение заданного промежутка времени.
7. Транспортное средство (100) с гидростатическим приводом, содержащее: по меньшей мере, одно колесо (227); по меньшей мере, один ходовой мотор (224, 524), соединенный, по меньшей мере, с одним колесом (227), причем, по меньшей мере, один ходовой мотор (224, 524) выполнен с возможностью управлять частотой вращения мотора и направлением вращения мотора; насос (202) переменной производительности, причем насос (202) выполнен с возможностью обеспечивать величину расхода движущей жидкости, протекающей через мотор (224), при этом насос (202) содержит поворачивающийся наклонный диск (214), имеющий ось вращения, причем наклонный диск (214) выполнен с возможностью работать при выбранных углах относительно оси вращения, угол наклонного диска определяет указанную величину расхода движущей жидкости, указанная величина расхода движущей жидкости обеспечивает движение транспортного средства (100) со скоростью движения; устройство (216) управления, выполненное с возможностью изменения угла наклонного диска (214); электронный контроллер (232); датчик (218, 518) системы, установленный для измерения, частоты и направления вращения мотора (524), при этом датчик (218, 518) системы функционально соединен с электронным контроллером (232, 532) и выполнен с возможностью передачи фактического сигнала (240, 540) на контроллер (232, 532) во время работы транспортного средства (100); датчик (238) управления, установленный для измерения смещения органа (234) управления, причем датчик (238) управления функционально соединен с электронным контроллером (232) и выполнен с возможностью передачи требуемого сигнала (306), основанного на смещении указанного органа управления, на контроллер (232) во время работы транспортного средства (100); при этом электронный контроллер (232) выполнен с возможностью: приема указанного фактического сигнала и указываемого требуемого сигнала; вычисления разности между фактическим сигналом и требуемым сигналом; сравнения разности с пороговым значением; приращения временного значения при помощи таймера, когда разность превышает пороговое значение; сравнение указанного временного значения с заданным пределом времени; прекращение движения транспортного средства, когда временное значение, по меньшей мере, равно заданному пороговому значению.
8. Транспортное средство с гидростатическим приводом по п.7, в котором электронный контроллер включает в себя функцию поиска, выполненную с возможностью установления соответствия между сигналом управления от датчика управления и требуемым сигналом.
9. Транспортное средство с гидростатическим приводом по п.7, дополнительно включающее в себя тормоз, выполненный с возможностью прекращать вращение указанного, по меньшей мере, одного колеса относительно транспортного средства, и исполнительный механизм, выполненный с возможностью управлять тормозом.
10. Транспортное средство с гидростатическим приводом по п.9, в котором исполнительный механизм, выполненный с возможностью управлять тормозом, функционально связан с электронным контроллером, дополнительно выполненным с возможностью задействовать тормоз, когда временное значение, по меньшей мере, равно заданному пределу времени.
11. Транспортное средство с гидростатическим приводом по п.7, дополнительно содержащее исполнительный механизм насоса, выполненный с возможностью изменения угла наклонного диска.
12. Транспортное средство (100) с гидростатическим приводом по п.8, в котором электронный контроллер (232, 300) выполнен с возможностью выработки команд (322) регулировки, а исполнительный механизм (216) насоса выполнен с возможностью реагировать на команды (322) регулировки от электронного контроллера (232, 300).
13. Транспортное средство (100) с гидростатическим приводом по п.12, в котором электронный контроллер (232, 300) выполнен с возможностью выработки команд (322) регулировки на основе вычисленной разности (310) между фактическим сигналом (308, 608) и требуемым сигналом (306, 606).
| JP 2000170908 A, 23.06.2000 | |||
| EP 1350990 A1, 08.10.2003 | |||
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТАМИ ТРАНСПОРТНОГО СРЕДСТВА В ДИНАМИЧЕСКОМ РЕЖИМЕ | 1997 |
|
RU2102258C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ ВНЕЗАПНОГО УСКОРЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2180619C1 |

