ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение в общем относится к системам обеспечения эксплуатационной безопасности транспортеров и, в частности, к устройствам и способам для обнаружения отсутствующей ступени транспортера.
УРОВЕНЬ ТЕХНИКИ
[0002] Транспортеры, такие как эскалаторы, траволаторы, движущиеся дорожки и т.п., обеспечивают движущийся путь для быстрого и удобного транспортирования пассажиров из одного места в другое. В частности, движущиеся плиты или ступени транспортера выполнены с возможностью перемещения пассажиров вдоль длины указанного пути между двумя посадочными платформами при заранее определенных величинах скорости. Цепи ступеней, скрытые из виду и размещенные под указанным транспортером, служат для взаимного соединения каждой ступени с замыканием в петлю. Цепи ступеней, приводимые в движение посредством источника главного привода, валов привода и соответствующих звездочек цепной передачи, выполнены с возможностью обеспечения перемещения указанных ступеней вдоль открытой верхней поверхности транспортера с целью транспортирования пассажиров между посадочными платформами. Звездочки цепной передачи, размещенные внутри каждой посадочной платформы, выполнены с возможностью направления цепей ступеней через дугу с целью реверсирования направления перемещения ступеней и создания циклического пути возврата.
[0003] В транспортерах, из-за их постоянного движения, возможно возникновение различных сбоев по внутренним причинам, что в свою очередь может стать причиной травмирования пассажиров, находящихся на транспортере или вблизи него. Один из таких сбоев связан с невыровненными или отсутствующими плитами или ступенями. С течением времени возможно отрывание по меньшей мере одной ступени от соответствующих цепей ступеней, что может стать причиной падения указанной ступени внутрь транспортерной системы, причем это падение остается необнаруженным. Кроме того, причиной отсутствия ступеней может быть ненадлежащее техническое обслуживание. Транспортеры требуют периодического обслуживания, в процессе которого возможны снятие, замена и т.п. по меньшей мере одной ступени. Однако, если ступень не закреплена надлежащим образом или не выровнена заново относительно цепей ступеней, она может оторваться и упасть. В любом случае, если в системе управления транспортером происходит сбой при обнаружении пустоты, вызванной отсутствующей ступенью, транспортер может продолжить функционирование, выдвинуть указанную пустоту на верхнюю поверхность транспортера и подставить указанную пустоту пассажирам. Пассажиры по незнанию могут ступить в указанную пустоту, упасть и получить травму. Проблема отсутствующих плит или ступеней транспортеров, а также вопрос их обнаружения хорошо известны. Существует несколько систем, обеспечивающих меры по эксплуатационной безопасности транспортеров и предназначенных для точного обнаружения указанных сбоев, однако они имеют недостатки.
[0004] В некоторых известных системах обеспечения эксплуатационной безопасности транспортеров использованы электромеханические переключатели для обнаружения ступеней или их отсутствия. В таких системах электромеханические переключатели размещены внутри указанного пути возврата транспортера с целью обнаружения невыровненной или неподдерживаемой ступени. Из-за гравитации неподдерживаемая ступень в пути возврата может раскачиваться или свисать с цепей ступеней и попасть прямо на путь электромеханических переключателей. Электромеханические переключатели не могут надлежащим образом функционировать, если ступень находится вне своей позиции или полностью откреплена от цепей ступеней. Кроме того, электромеханические переключатели в значительной степени подвержены износу и ненадежны.
[0005] Другие системы обнаружения отсутствующей ступени содержат фотоэлектрические датчики, выполненные с возможностью использования света или прерывания света с целью мониторинга ступеней транспортера. В таких системах каждая ступень транспортера должна содержать сквозное отверстие, проходящее через всю ширину ступени. Затем фотоэлектрический световой луч оказывается выровненным с целью прохождения напрямую через отверстие ступени, когда ступень надлежащим образом выровнена и поддержана посредством цепей ступеней. Если ступень не выровнена, то световой луч оказывается прерванным и система управления реагирует на этот сбой. Недостаток такой схемы в том, что каждая из ступеней требует значительных модификаций с целью адаптации к фотоэлектрическим датчикам и, следовательно, не может быть модернизирована на транспортерах, несущих ступени без сквозных отверстий. Кроме того, системы обеспечения эксплуатационной безопасности транспортеров, в которых использованы фотоэлектрические датчики, подвержены воздействию пыли, грязи, инородных частиц, которые могут присутствовать или со временем накапливаться в сквозных отверстиях и прерывать световые пути.
[0006] Еще одна известная система обнаружения отсутствующей ступени включает датчики приближения, которые постоянно обнаруживают присутствие каждой проходящей ступени в пути возврата. Датчики выполнены с возможностью электромагнитного взаимодействия с металлом в проходящей ступени, с целью вывода соответствующего напряжения или тока, обозначающего присутствие или отсутствие проходящей ступени. Однако в случаях когда ступени модифицированы для пластмассовых или резиновых вставных элементов, ступени содержат количество металла, недостаточное для их точного и уверенного обнаружения посредством указанных датчиков. Вообще, системы обеспечения эксплуатационной безопасности транспортеров, в которых использованы датчики приближения, требуют внесения существенных модификаций в конструкцию ступеней. Некоторые системы обеспечения эксплуатационной безопасности, выполненные с возможностью их приведения в движение посредством датчиков приближения, требуют линейного выравнивания верхних поверхностей ступеней в указанном пути возврата. Другие системы требуют, чтобы торцевые поверхности ступеней были линейными или плоскими.
[0007] Среди известных датчиков приближения, используемых для обнаружения отсутствующих ступеней, наиболее распространены емкостные и индуктивные датчики. Емкостные датчики выполнены с возможностью непрерывного измерения разности в напряжении или отклонений в электрическом поле, которое сформировано посредством самого датчика. Когда проходящая ступень находится в непосредственной близости к датчику, металл ступеней корректирует электрическое поле, создает разность в напряжении и принуждает датчик к выводу сигнала, соответствующего изменению в электрическом поле. Однако емкостные датчики подвержены воздействию источников, отличных от указанного металла проходящей ступени, т.е. таких, как пыль, грязь и влажность воздуха, и следовательно, электрические сигналы, выводимые посредством емкостных датчиков, в общем ненадежны.
[0008] Кроме того, многие системы содержат индуктивные датчики приближения, которые являются более прочными и надежными по сравнению с емкостными датчиками. Индуктивные датчики осуществляют непрерывный мониторинг уровня тока, протекающего через индуктивный контур внутри указанного датчика. Когда проходящая ступень находится в непосредственной близости к датчику, металл ступеней существенно изменяет протекание тока в индуктивном контуре и принуждает датчик к выводу сигнала, соответствующего изменению в индуктивности. Как и в случае с емкостными датчиками, индуктивные датчики выполнены с возможностью вывода непрерывных сигналов, которые требуют соответствующей системы управления для мониторинга непрерывных сигналов, выводимых посредством емкостного или индуктивного датчика. Однако в соответствии с новыми стандартами и правилами техники безопасности для транспортерных систем, системы обеспечения эксплуатационной безопасности, которые выполнены с возможностью мониторинга непрерывных сигналов, должны также содержать дорогостоящие сертифицированные датчики, выполненные с возможностью измерения степени эксплуатационной безопасности датчиков приближения.
[0009] Кроме того, системы обнаружения отсутствующих ступеней, в которых использованы датчики приближения и которые основаны на выходе непрерывного сигнала, зависимы от параметров, которые не являются неизменными или постоянными, например, от скорости транспортера и времени. Например, если использовать скорость транспортера в качестве системы отсчета, то посредством системы обнаружения отсутствующих ступеней формируются расчетные временные рамки или расчетное окно, в которых последующая ступень оказывается обнаруженной посредством датчика приближения. С точки зрения обработки сигналов датчики приближения выводят непрерывные сигналы обнаружения, и расчетное окно является довольно широким и расплывчатым. Из-за этого системе управления труднее безошибочно отфильтровать нежелательный шум от требуемого сигнала обнаружения и принять правильное решение на основании отфильтрованного сигнала. Кроме того, этот способ эффективен, когда транспортер перемещается с постоянной скоростью, но он ненадежен, когда транспортер ускоряется, замедляется, включается или выключается.
[0010] Таким образом, необходима разработка надежных, точных и рентабельных систем обеспечения эксплуатационной безопасности, выполненных с возможностью обнаружения невыровненных или отсутствующих ступеней, причем указанные системы должны быть в полном соответствии с действующими стандартами и правилами техники безопасности. В частности, необходима разработка системы обнаружения отсутствующей ступени транспортера, которая не требует использования в ней дорогостоящих сертифицированных датчиков и является системой с резервированием, или обеспечивает самодиагностику. Кроме того, необходима разработка системы обнаружения отсутствующей ступени, которая выполнена с возможностью обеспечения переменных выходных сигналов с меньшим количеством шума и с возможностью корреляции выходных сигналов датчика и вывода постоянных контрольных величин, независимых от скорости транспортера и времени.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0011] В соответствии с одним вариантом реализации настоящего изобретения, предложено устройство для обнаружения отсутствующей или невыровненной ступени транспортера, проходящего между первой платформой и второй платформой. Указанное устройство содержит по меньшей мере один датчик скорости привода, выполненный с возможностью обнаружения скорости привода и вывода импульсного сигнала привода, соответствующего указанной скорости привода; по меньшей мере один датчик первой ступени и по меньшей мере один датчик второй ступени, причем датчик первой ступени выполнен с возможностью обнаружения каждой ступени на первой платформе и вывода импульсного сигнала первой ступени, соответствующего ступеням на первой платформе, а датчик второй ступени выполнен с возможностью обнаружения каждой ступени на второй платформе и вывода импульсного сигнала второй ступени, соответствующего ступеням на второй платформе, и блок управления, принимающий указанные импульсный сигнал привода и импульсные сигналы первой и второй ступени и выполненный с возможностью определения частоты указанного импульсного сигнала привода, определения отношения приводных импульсов за шаг ступени, определения разности фаз между указанными импульсными сигналами первой и второй ступени, мониторинга изменения указанного отношения импульсов за шаг ступени и указанной разности фаз импульсного сигнала ступени и создания инструкций для регулирования работы транспортера в ответ на обнаруженное изменение.
[0012] В соответствии с другим вариантом реализации, предложен способ обнаружения отсутствующей или невыровненной ступени транспортера, проходящего между первой платформой и второй платформой. Указанный способ включает этапы определения импульсного сигнала привода, соответствующего скорости транспортера; определения импульсного сигнала первой ступени, соответствующего ступеням на первой платформе; определения импульсного сигнала второй ступени, соответствующего ступеням на второй платформе, определения отношения приводных импульсов за шаг ступени; определение разности фаз между указанными импульсными сигналами первой и второй ступени; мониторинга изменения отношения импульсов за шаг ступени и указанной разности фаз импульсного сигнала ступени и создания инструкций для регулирования работы транспортера в ответ на обнаруженное изменение.
[0013] Ниже приведено подробное описание вариантов реализации настоящего изобретения со ссылками на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0014] На фиг.1 показан перспективный вид транспортера, содержащего примерную систему обеспечения эксплуатационной безопасности для обнаружения отсутствующих ступеней, сформированную в соответствии с описанием настоящего изобретения.
[0015] На фиг.2 показана схема ступеней в пути возврата при приближении к посадочной платформе.
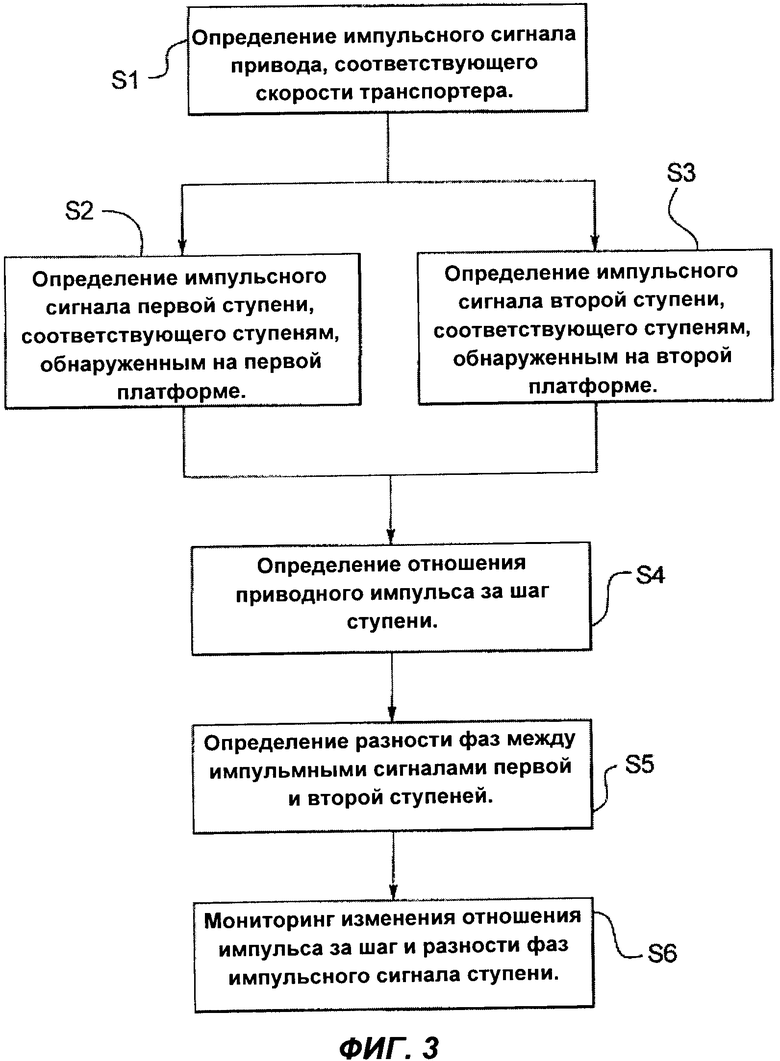
[0016] На фиг.3 показана блок-схема примерного способа обнаружения отсутствующих ступеней в транспортере.
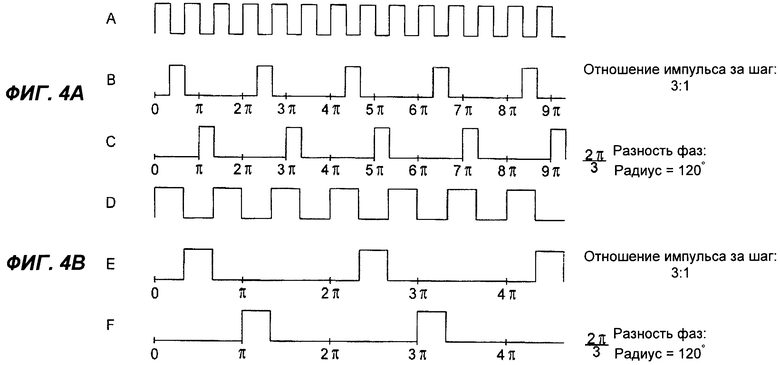
[0017] На фиг.4A-4B схематически показаны временные диаграммы импульсных сигналов, выводимых различными датчиками при первой скорости транспортера и при второй скорости транспортера.
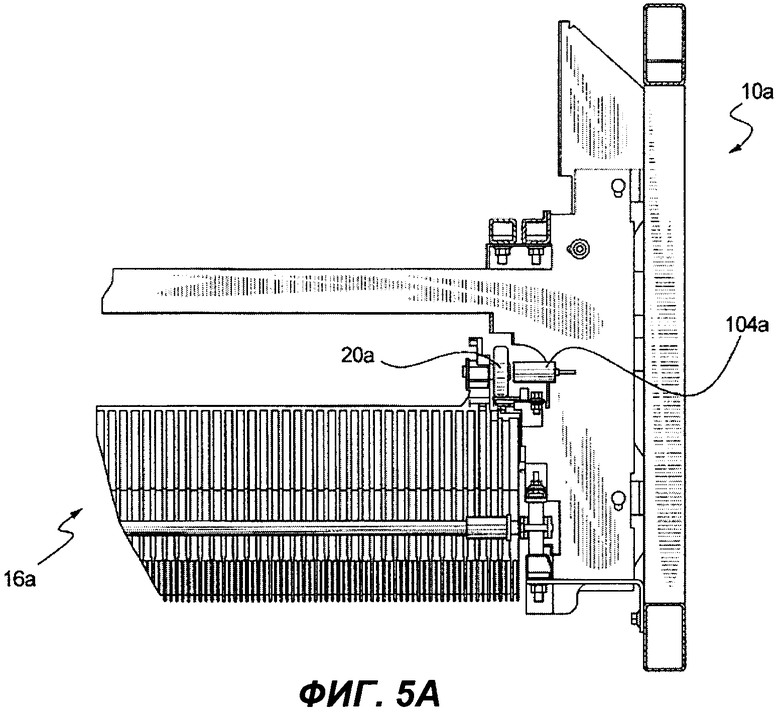
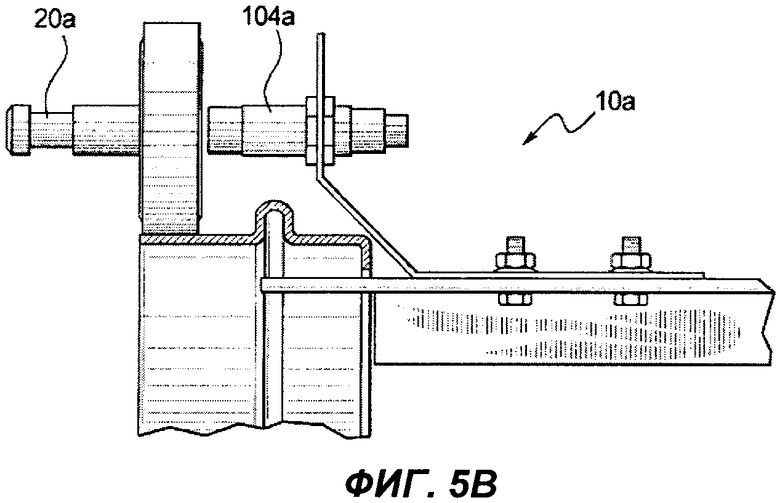
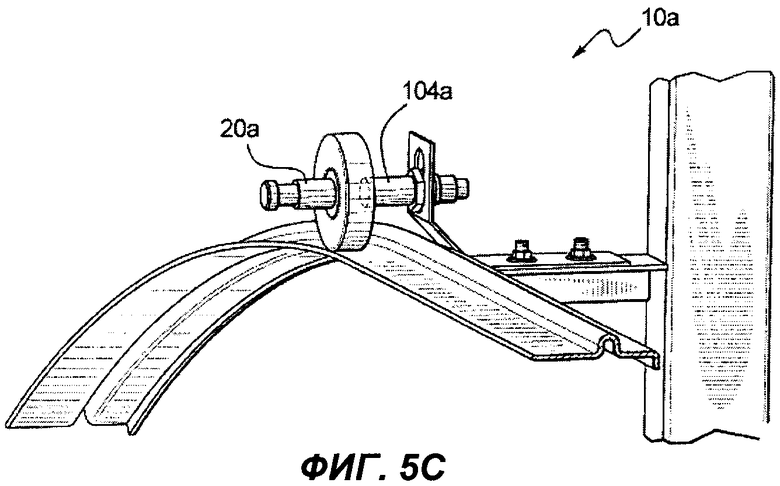
[0018] На фиг.5A-5C показаны различные виды датчика, размещенного с целью обнаружения оси ролика ступени эскалаторной ступени.
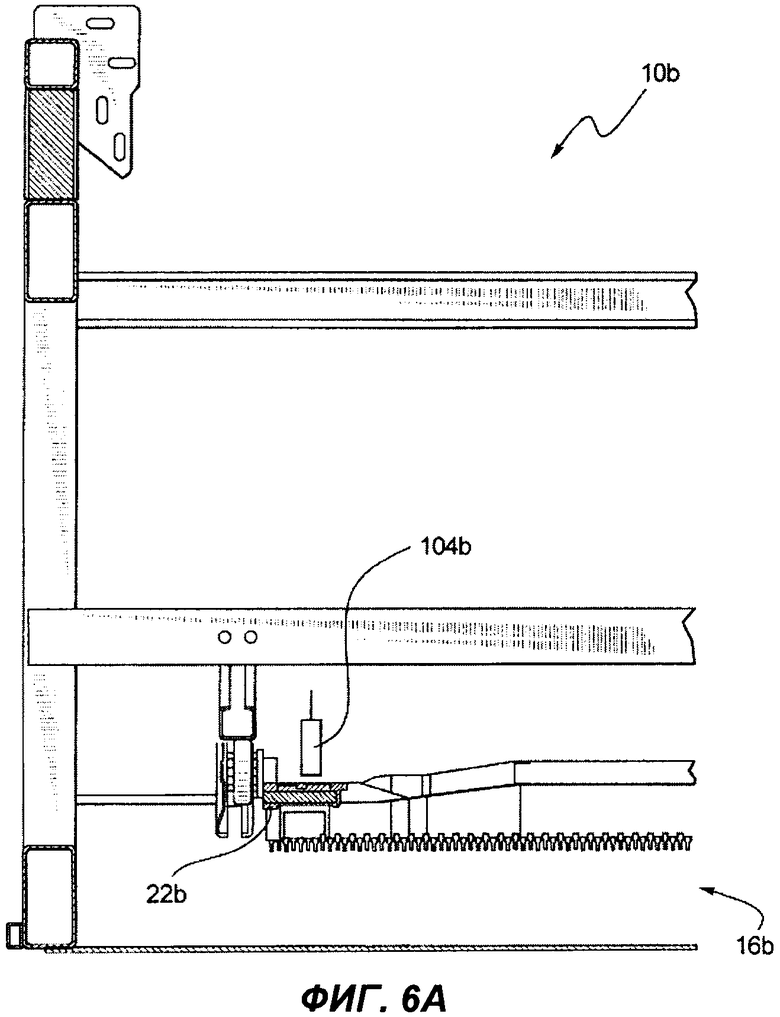
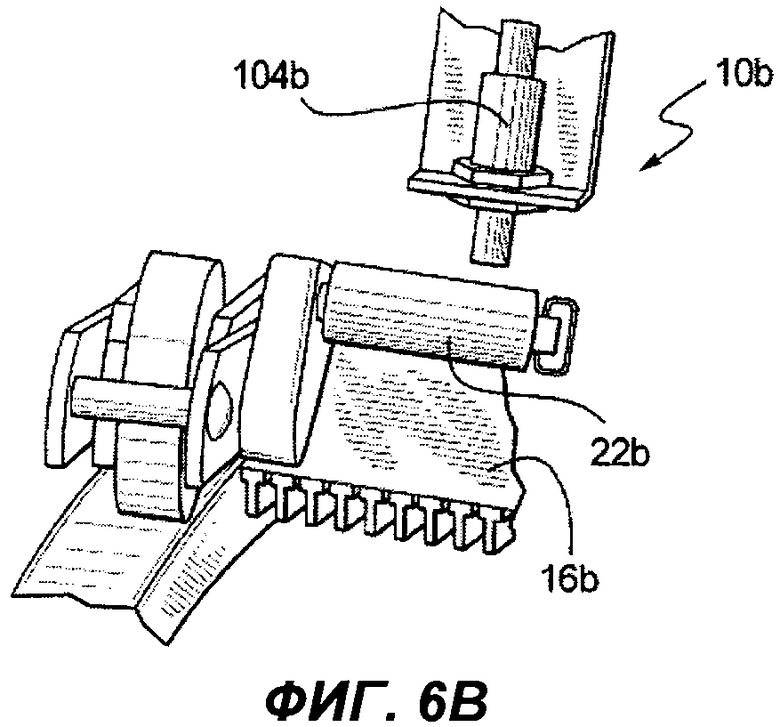
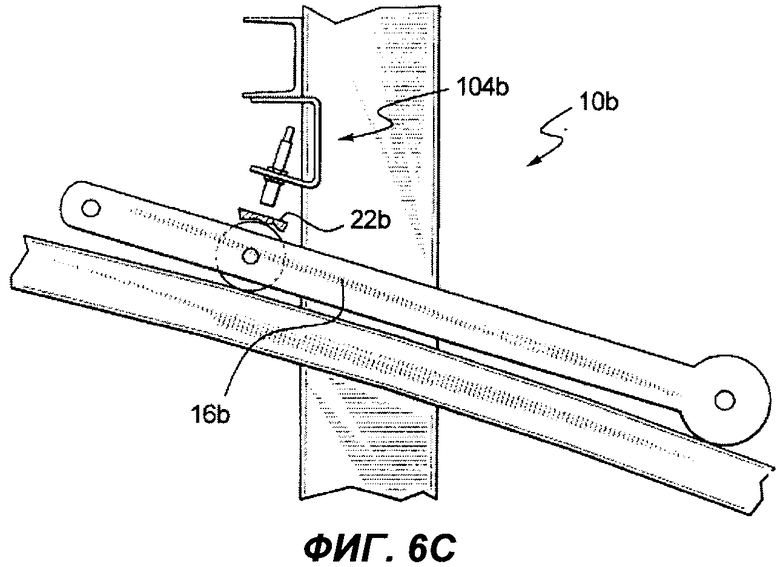
[0019] На фиг.6A-6C показаны различные виды датчика, размещенного с целью обнаружения пути движения плиты с задней проушиной.
[0020] В соответствии с настоящим изобретением, возможны различные изменения и использование альтернативных конструкций, однако некоторые варианты реализации настоящего изобретения далее описаны более подробно со ссылками на прилагаемые чертежи. Возможны различные модификации и замены элементов их эквивалентами, не выходящие за пределы объема настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0021] На фиг.1 показана, в соответствии с одним вариантом реализации, система обеспечения эксплуатационной безопасности, или, в частности, устройство для обнаружения отсутствующей ступени транспортера 100. Очевидно, что настоящее описание применимо для формирования систем обеспечения эксплуатационной безопасности и устройств для обнаружения отсутствующих ступеней транспортеров, которые отличны от конкретных систем и устройств, описанных ниже. Для специалиста в данной области техники очевидно, что ниже описаны лишь примерные варианты реализации настоящего изобретения.
[0022] Как показано на фиг.1, предложен вариант реализации транспортера 10 в форме эскалатора, который содержит первую платформу 12, вторую платформу 14, движущиеся плиты или ступени 16, проходящие между первой и второй платформами 12, 14, а также движущиеся поручни 18, размещенные вдоль ступеней 16. Ступени 16 транспортера 10 приводятся в движение посредством главного приводного источника (не показан), например электродвигателя и т.п., и принуждаются к перемещению между платформами 12, 14. Главный приводной источник приводит во вращение вал привода и соответствующие зубчатые колеса с целью вращения в замкнутом цикле лент или цепей ступеней, которые выполнены с возможностью механического взаимного соединения внутренних поверхностей ступеней 16 изнутри транспортера 10. Внутри каждой посадочной платформы 12, 14 размещены звездочки 19 цепной передачи, выполненные с возможностью направления цепей ступеней и прикрепленных ступеней 16 через дугу с целью реверсирования направления перемещения ступеней и создания циклического пути возврата. Поручни 18 выполнены с возможностью вращательного перемещения посредством аналогичных средств вдоль ступеней 16 при скорости, сопоставимой со скоростью ступеней 16.
[0023] Кроме того, согласно фиг.1, транспортер 10 оснащен такими средствами обеспечения эксплуатационной безопасности, как показанное устройство 100 для обнаружения отсутствующей ступени. Устройство 100 может содержать датчики и блок 200 управления для измерения различных параметров транспортера 10. В частности, устройство 100 выполнено с возможностью измерения скорости привода транспортера 10, скорости поручня 18, присутствия ступеней 16 относительно каждой посадочной платформы 12, 14 и т.п. Для определения скорости транспортера или скорости привода устройство 100 оснащено датчиком 102 скорости привода. Датчик 102 содержит по меньшей мере один индуктивный датчик, размещенный в непосредственной близости к зубьям звездочек 19 цепной передачи, которые выполнены с возможностью приведения в движение цепи ступеней, соединяющей между собой указанные ступени. В соответствии с другим вариантом реализации, датчик 102 скорости привода содержит фотоэлектрические датчики или кодовый датчик положения, размещенные на оси звездочки 19, выполненные с возможностью обнаружения скорости вращения звездочки 19. С целью точного обнаружения присутствия или отсутствия ступеней 16, устройство 100 содержит датчики 104, 106 ролика ступени, размещенные в посадочных платформах 12, 14 транспортера 10. В частности, датчики 104, 106 ролика ступени содержат датчики приближения, которые выполнены с возможностью обнаружения металла в указанном ролике ступени или в осях 20 ролика ступени, как показано на фиг.2. Кроме того, устройство 100 содержит датчики 108 поручней для измерения величины скорости поручней 18. Устройство 100 выполнено с возможностью мониторинга показаний датчиков, или корреляций сигналов показаний датчиков, на предмет любого существенного отклонения или признаков сбоя. Как только отклонение или сбой обнаружен, устройство 100 соответствующим образом выдает необходимые инструкции для регулирования работы транспортера 10. Например, если устройство 100 обнаруживает серьезный сбой, то это оно выводит необходимые инструкции или сигналы управления на соответствующий контроллер 110 транспортера с целью замедления или остановки транспортера 10.
[0024] Как показано на блок-схеме фиг.3, устройство 100 для обнаружения отсутствующей ступени выполнено с возможностью корреляции выходных сигналов, выводимых указанными датчиками, с целью устранения недостатков, связанных с известными процессами обнаружения ступени, зависящими от времени. В частности, устройство вначале определяет переменный импульсный сигнал привода, соответствующий скорости привода транспортера и соответствующий выходу датчика 102 скорости привода на этапе S1. Кроме того, устройство 100 выполнено с возможностью определения первого импульсного сигнала ступени, соответствующего ступеням 16, обнаруженного посредством датчика 104 ролика ступени первой посадочной платформы 12 на этапе S2. Аналогичным образом, устройство 100 выполнено с возможностью определения второго импульсного сигнала ступени, соответствующего ступеням 16, обнаруженного посредством датчика 106 ролика ступени второй посадочной платформы 14, как на этапе S3. На основании этих сигналов импульса устройство 100 определяет постоянные величины или характеристики, относящиеся к транспортеру 10. Как показано на фиг.3, на этапе S4 устройство 100 для обнаружения отсутствующей ступени определяет отношение между количеством импульсов в сигнале приводного импульса на ступень 16 или за шаг ступени. Это отношение представляет собой постоянную величину или характеристику, связанную с конкретным транспортером 10, и не изменяется со скоростью транспортера или со временем Кроме того, устройство 100 выполнено с возможностью определения разности фаз между указанными импульсными сигналами первой и второй ступени, соответствующими платформам 12, 14, как показано на этапе S5. Эта разность фаз представляет собой другую постоянную величину, связанную с транспортером 10, и не изменяется со скоростью транспортера или со временем. На последующем этапе S6 устройство 100 для обнаружения отсутствующей ступени выполнено с возможностью мониторинга изменения как отношения импульсов за шаг, так и разности фаз между указанными импульсными сигналами первой и второй ступени. Возможно выполнение корреляции указанных импульсных сигналов с целью получения в результате постоянных величин, так как существует постоянная взаимозависимость между скоростью вращения главного приводного вала и случаем, в котором оказывается обнаруженным следующий ролик ступени или ось 20 ролика. Соответственно устройство 100 выполнено с возможностью эффективного обнаружения отсутствующих ступеней во всех случаях функционирования независимо от скорости транспортера, ускорения, замедления и т.п. Кроме того, посредством учитывания по меньшей мере одной взаимозависимости и осуществления дублирования устройство 100 с большей вероятностью обнаруживает истинный сбой и с меньшей вероятностью принимает ошибочное решение
[0025] На фиг.4A и 4B показаны эталонные временные диаграммы, демонстрирующие один способ, посредством которого определяют отношение импульса за шаг и разность фаз между импульсными сигналами ступени. Согласно фиг.4A, сигнал A иллюстрирует импульсный сигнал привода транспортера 10 при первой скорости. Сигналы В и С иллюстрируют импульсные сигналы ступени, соответствующие ступеням, обнаруженным соответственно на первой и второй платформах 12, 14. В соответствии со способом, показанным на фиг.3, возможно выполнение корреляции указанных импульсных сигналов с целью получения в результате постоянных величин, а именно отношения импульса за шаг и разности фаз. Например, посредством подсчета количества импульсов привода в Сигнале A, который имеет место между последовательными импульсами ступени в Сигнале B или в Сигнале C, определяют, что отношение импульса за шаг равно 3:1. Кроме того, посредством сравнения фазового сдвига между Сигналом В и Сигналом C определяют, что разность фаз составляет 2π/3 радиан или 120°.
[0026] Аналогичные анализы сигналов D, E и F, показанных на фиг.4B, которые иллюстрируют импульсный сигнал привода транспортера 10 при второй скорости, которая составляет половину от скорости привода согласно примеру, показанному на фиг.4A, и импульсные сигналы ступени, соответствующие ступеням, обнаруженным соответственно на первой и второй платформах 12, 14, приводят к по существу одинаковым результатам. В частности, количество импульсов привода в Сигнале D, который имеет место между последовательными импульсами ступени в Сигнале E или в Сигнале F, определено равным 3:1 и разность фаз между Сигналами E и F определена равной 2π/3 радиан или 120°, как в примере на фиг.4A. Отношение импульса за шаг и разность фаз между импульсными сигналами ступеней остаются постоянными для конкретного транспортера 10 независимо от скорости транспортера, ускорения, замедления и т.п. Однако, если ступень 16 отсутствует, не выровнена и/или не обнаружена, это вызывает немедленное изменение отношения импульса за шаг и изменение разности фаз между импульсными сигналами ступеней указанных первой и второй платформ 12, 14. Соответственно, устройство 100 для обнаружения отсутствующей ступени реагирует только в случае, если существуют значительные отклонения отношения импульса за шаг и разности фаз между импульсными сигналами ступеней.
[0027] Для обеспечения точного обнаружения отсутствующих ступеней и эффективного применения способов корреляции сигналов, представленных в настоящем описании, датчики 104, 106 устройства 100 для обнаружения отсутствующей ступени должны быть выполнены надлежащим образом. Например, устройство 100 для обнаружения отсутствующей ступени может требовать индуктивных датчиков приближения, которые проявляют изменения в электрических характеристиках в присутствии металла. Кроме того, устройство 100 может требовать наличие индуктивных датчиков для вывода переменных сигналов. Однако индуктивный датчик, выполненный с возможностью реагирования на любой металл в проходящей мимо него ступени, выводит непеременный непрерывный сигнал для полного шага указанной ступени и, таким образом, для полной длины соответствующей цепи ступеней. Соответственно, указанные датчики должны быть выполнены и тщательно размещены так, чтобы реагировать только на малую часть проходящей ступени с целью обеспечения прерывистого переменного выходного сигнала, как показано на фиг.5A-5C и 6A-6C. В соответствии с вариантами реализации, показанными на фиг.5A-5C, датчик 104a приближения транспортера 10а эскалаторного типа выполнен в таком размере, чтобы иметь целью только ось 20а ролика ступени проходящей ступени 16a, и размещен по существу в непосредственной близости к траектории движения оси 20a ролика ступени. В соответствии с вариантами реализации, показанными на фиг.6A-6C, датчик 104b приближения пути движения или транспортера 10b выполнен в таком размере, чтобы иметь целью только плиту 22b с задней проушиной проходящей плиты или ступени 16b, и размещен по существу в непосредственной близости к траектории движения плиты 22b с задней проушиной.
[0028] На основании вышеизложенного очевидно, что в настоящем изобретении предложены транспортеры, например, эскалаторы, траволаторы, движущиеся дорожки и т.п., оснащенные системами обнаружения отсутствующих ступеней, выполненными с возможностью устранения недостатков, известных из уровня техники. В частности, в настоящем изобретении предложены средства определения переменного импульсного сигнала привода, соответствующего скорости транспортера, для определения импульсных сигналов, соответствующих ступеням, обнаруженным на каждой посадочной платформе, и для корреляции указанных сигналов с целью обнаружения невыровненных или отсутствующих ступеней. Посредством корреляции выходных сигналов датчика транспортера можно определить постоянные контрольные величины или характеристики, относящиеся к указанному конкретному транспортеру. Указанные постоянные величины включают, например, отношение приводного импульса за шаг ступени и разность фаз между импульсными сигналами ступени, и являются независимыми от скорости транспортера и от времени. Путем использования в качестве эталона по меньшей мере одной постоянной величины, в настоящем изобретении обеспечено дублирование и обнаружение отсутствующей ступени при любой скорости или ускорении указанного транспортера. Кроме того, путем обеспечения выходных сигналов датчика в форме переменных импульсных сигналов возможно формирование транспортера в полном соответствии со стандартами и правилами техники безопасности без необходимости установки дорогостоящих сертифицированных датчиков для измерения степени эксплуатационной безопасности.
[0029] В настоящем описании изложены лишь некоторые варианты реализации настоящего изобретения, однако для специалиста в данной области техники очевидно, что возможны изменения и модификации без отступления от сущности настоящего изобретения. Эти и другие варианты реализации следует считать эквивалентными и находящимися в пределах объема настоящего изобретения.

Изобретение предназначено для использования в транспортерах, траволаторах, эскалаторах и позволяет определять отсутствие ступени эскалатора, а также наличие невыровненной ступени. При определении отсутствующей ступени эскалатора посредством датчика (102) скорости определяют импульсный сигнал привода, соответствующий скорости транспортера (10). Определяют импульсный сигнал первой ступени (16) на первой платформе (12). Определяют импульсный сигнал второй ступени (16) на второй платформе (14). Определяют отношение приводных импульсов за шаг ступени. Определяют разность фаз между указанными импульсными сигналами первой и второй ступени (16). Мониторят изменение отношения импульсов за шаг ступени, разности фаз импульсного сигнала ступени (16). Замедляют или останавливают эскалатор (10, 10а, 10b) в ответ на обнаруженное изменение. Достигается определение отсутствующей или невыровненной ступени эскалатора. 2 н. и 15 з.п. ф-лы, 11 ил.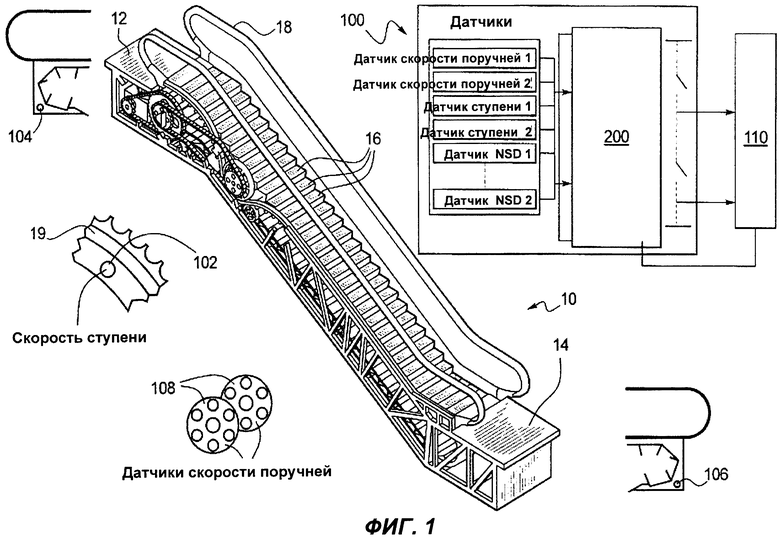
1. Устройство (100) для обнаружения отсутствующей или невыровненной ступени (16, 16a, 16b) транспортера (10, 10a, 10b), проходящего между первой платформой (12) и второй платформой (14), содержащее: по меньшей мере, один датчик (102) скорости привода, выполненный с возможностью обнаружения скорости привода и возможностью вывода импульсного сигнала привода, соответствующего указанной скорости привода; по меньшей мере, один датчик (104, 104a, 104b) первой ступени и, по меньшей мере, один датчик (106) второй ступени, причем датчик (104, 104a, 104b) первой ступени выполнен с возможностью обнаружения каждой ступени (16, 16a, 16b) на первой платформе (12, 14) и вывода импульсного сигнала первой ступени, соответствующего ступеням (16, 16a, 16b) на первой платформе (12), а датчик (106) второй ступени выполнен с возможностью обнаружения каждой ступени (16, 16a, 16b) на второй платформе (12, 14) и вывода импульсного сигнала второй ступени, соответствующего ступеням (16, 16a, 16b) на второй платформе (14); и блок (200) управления, принимающий указанные импульсный сигнал привода и импульсные сигналы первой и второй ступени и выполненный с возможностью определения частоты указанного импульсного сигнала привода, определения отношения приводных импульсов за шаг ступени, определения разности фаз между указанными импульсными сигналами первой и второй ступени, мониторинга изменения указанного отношения импульсов за шаг ступени и указанной разности фаз импульсного сигнала ступени и создания инструкций для регулирования работы транспортера (10, 10a, 10b) в ответ на обнаруженное изменение.
2. Устройство (100) по п.1, в котором блок (200) управления выполнен с возможностью создания инструкций для регулирования работы транспортера (10, 10a, 10b) только в ответ на обнаруженное изменение как отношения импульсов за шаг ступени, так и разности фаз импульсного сигнала ступени.
3. Устройство (100) по п.1, в котором каждый из датчиков (104, 104a, 104b, 106) первой и второй ступени выполнен с возможностью обнаружения только оси (20, 20a) ролика каждой ступени (16, 16a, 16b) на соответствующей платформе (12, 14).
4. Устройство (100) по п.1, в котором каждый из датчиков (104, 104a, 104b, 106) первой и второй ступени выполнен с возможностью обнаружения только плиты (22b) с задней проушиной каждой ступени (16, 16а, 16b) на соответствующей платформе (12, 14).
5. Устройство (100) по п.1, в котором, по меньшей мере, один из датчиков (104, 104a, 104b, 106) ступени выполнен с возможностью обнаружения только оси (20, 20a) ролика каждой ступени (16, 16а, 16b) на соответствующей платформе (12, 14), и, по меньшей мере, один из этих датчиков (104, 104a, 104b, 106) ступени выполнен с возможностью обнаружения только плиты (22b) с задней проушиной каждой ступени (16, 16a, 16b) на соответствующей платформе (12, 14).
6. Устройство (100) по п.1, в котором соотношение импульсов за шаг ступени и разность фаз импульсного сигнала ступени остаются, по существу, постоянными при ускорении и замедлении транспортера (10, 10а, 10b).
7. Устройство (100) по п.1, в котором датчик (102) скорости привода представляет собой кодовый датчик положения.
8. Устройство (100) по п.1, в котором датчик (102) скорости привода представляет собой датчик приближения.
9. Устройство (100) по п.1, в котором каждый из указанных датчиков (104, 104a, 104b, 106) первой и второй ступени представляет собой датчик приближения.
10. Устройство (100) по п.8, в котором каждый из указанных датчиков (104, 104a, 104b, 106) первой и второй ступени представляет собой индуктивный датчик.
11. Устройство (100) по п.1, дополнительно содержащее датчики (108) скорости поручней.
12. Способ обнаружения отсутствующей или невыровненной ступени (16, 16a, 16b) транспортера (10, 10a, 10b), проходящего между первой платформой (12) и второй платформой (14), включающий этапы:
определения импульсного сигнала привода, соответствующего скорости транспортера (10, 10a, 10b); определения импульсного сигнала первой ступени, соответствующего ступеням (16, 16a, 16b) на первой платформе (12); определения импульсного сигнала второй ступени, соответствующего ступеням (16, 16a, 16b) на второй платформе (14); определения отношения приводных импульсов за шаг ступени; определения разности фаз между указанными импульсными сигналами первой и второй ступени;
мониторинга изменения как указанного отношения импульсов за шаг ступени, так и указанной разности фаз импульсного сигнала ступени и создания инструкций для регулирования работы транспортера (10, 10a, 10b) в ответ на обнаруженное изменение.
13. Способ по п.12, в котором этап создания инструкций для регулирования работы транспортера (10, 10a, 10b) происходит только в ответ на обнаруженное изменение как указанного отношения импульсов за шаг ступени, так и указанной разности фаз импульсного сигнала ступени.
14. Способ по п.12, в котором каждый из указанных импульсных сигналов первой и второй ступеней соответствует оси (20, 20a) ролика каждой ступени (16, 16a, 16b) на соответствующей платформе (12, 14).
15. Способ по п.12, в котором каждый из указанных импульсных сигналов первой и второй ступеней соответствует плите (22b) с задней проушиной каждой ступени (16, 16a, 16b) на соответствующей платформе (12, 14).
16. Способ по п.12, в котором, по меньшей мере, один из импульсных сигналов ступени соответствует только оси (20, 20a) ролика каждой ступени (16, 16a, 16b) на соответствующей платформе (12, 14), и, по меньшей мере, один из импульсных сигналов ступени выполнен соответствующим только плите (22b) с задней проушиной каждой ступени (16, 16a, 16b) на соответствующей платформе (12, 14).
17. Способ по п.12, в котором соотношение импульсов за шаг ступени и разность фаз между импульсными сигналами первой и второй ступеней остаются, по существу, постоянными при ускорении и замедлении транспортера(10, 10a, 10b).
| WO 1995025061 A1, 21.09.1995 | |||
| УСТРОЙСТВО КОНТРОЛЯ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ ЭСКАЛАТОРА | 1992 |
|
RU2031829C1 |
| JOOSTEN, DREW, NEW TECHNOLOGY FOR ESCALATOR TESTING, (1998) ELEVATOR WORLD, 46 (1), p.75-78, ISSN: 00136158. | |||

