Настоящее изобретение относится к механизму для выдачи (получения) показаний многооборотного углового положения входного звена.
Механизмы, обеспечивающие выдачу показаний углового положения, например кодовые датчики положения, имеют многочисленные применения, включая определение положения механических приводов, используемых для управления, например, гидравлическими клапанами. Абсолютный датчик положения представляет собой кодовый датчик положения, который может определить абсолютное положение входного звена, например, в виде конкретного углового положения. Такие кодовые датчики положения, после отключения питания, могут продолжать выдачу показаний абсолютного положения при восстановлении питания, даже если движения кодового датчика происходило при отключенном питании. Многооборотные абсолютные датчики положения обычно имеют несколько шестерен для определения углового положения на нескольких оборотах. Однако, если измерительный датчик положения попадает в промежуточное положение, например между двумя положениями указателя, то результат измерения может быть неопределенным. Более того, если отказывает один из чувствительных элементов, то обычно отказывает и весь кодовый датчик положения.
Настоящее изобретение обеспечивает, как решение некоторых из рассмотренных выше вопросов, так и достижение других раскрытых ниже преимуществ.
В настоящем изобретении предлагается механизм, приспособленный для выдачи показаний многооборотного (поворотного) углового положения входного звена, который включает:
комплект вращающихся (способных вращаться) звеньев, выполненных с возможностью в процессе использования вращаться в соответствии с вращением входного звена;
комплект измерительных датчиков, выполненных с возможностью измерения и выдачи углового положения по меньшей мере одного из вращающихся звеньев; и
устройство, выполненное с возможностью использования результатов измерения углового положения от комплекта измерительных датчиков для выдачи показаний многооборотного углового положения входного звена,
причем вращающиеся звенья выполнены с возможностью вращения одновременно, но с разными скоростями,
комплект вращающихся звеньев включает по меньшей мере четыре вращающихся звена, и комплект измерительных датчиков включает по меньшей мере четыре измерительных датчика, выполненных с возможностью измерения и выдачи углового положения соответствующего одного из по меньшей мере четырех вращающихся звеньев,
каждое из вращающихся звеньев имеет любое, отличное передаточное отношение по скорости относительно других вращающихся звеньев, и от одного из комплекта вращающихся звеньев прямо (непосредственно) приводятся во вращение все остальные вращающиеся звенья.
Таким образом, каждое из вращающихся звеньев может иметь любое индивидуальное (среди вращающихся звеньев) передаточное отношение вращения, и не существует никаких ограничений на выбор этих передаточных отношений, например выбор передаточных отношений не должен удовлетворять каким-либо специальным закономерностям, например работе алгоритма декодирования, требующего, чтобы показания положения вращающихся звеньев соответствовали целочисленным значениям. С другой стороны, выбор передаточных отношений может быть сделан согласно одному или более конструктивным параметрам. Например, вращающиеся звенья могут быть выбраны так, чтобы передаточные отношения вращения не имели общего множителя (кроме единицы). Вращающиеся звенья могут иметь шестерни с разным количеством зубьев.
В процессе работы, движение вращающихся звеньев вместе со входным звеном является непрерывным и бесступенчатым. Измерительные датчики могут обеспечивать измерение абсолютного положения одного или более вращающихся звеньев в пределах 360°, используя, например, оптические, магнитные или радиочастотные сенсорные датчики. Механизм может иметь вращающиеся звенья А-N, каждое из которых имеет соответствующее передаточное отношение RA-RN, при этом упомянутый датчик имеет максимально допустимую пиковую погрешность, рассчитываемую как:

Одно из нескольких вращающихся звеньев представляет собой первичное вращающееся звено, от которого приводятся во вращение все остальные вращающиеся звенья, и остальные вращающиеся звенья не приводят во вращение ни одно из других вращающихся звеньев.
Несколько вращающихся звеньев, каждое, могут иметь условное нулевое/исходное/начальное (угловое) положение. Устройство может быть выполнено с возможностью выдачи показаний положения посредством вычисления того, насколько далеко вращающиеся звенья ушли от своих нулевых положений. Выполняемые устройством вычисления могут включать виртуальное скручивание назад по меньшей мере одного, а обычно всех вращающихся звеньев до их соответствующих нулевых положений. Устройство может быть выполнено с возможностью:
виртуального скручивания назад первого по порядку из вращающихся звеньев до достижения его нулевого положения; затем
для каждого вращающегося звена, кроме первого по порядку вращающегося звена:
вычисления виртуального положения вращающегося звена на основе угла, на который повернулось предыдущее по порядку вращающееся звено при его виртуальном скручивании назад, и
виртуального скручивания назад вращающегося звена и всех предыдущих по порядку вращающихся звеньев так, чтобы они оказались в своих нулевых положениях.
На шаге вычисления могут использоваться хранимые данные, например справочная таблица, представляющая положение вращающегося звена, когда предыдущее по порядку вращающееся звено(-я) находится в нулевом положении(-ях), а данные показывают, сколько раз предыдущие по порядку вращающиеся звенья вместе прошли через свои нулевые положения, когда данное вращающееся звено попало в соответствующее положение.
Вращающиеся звенья могут быть расположены по копланарной или по коаксиальной схеме.
Для измерения положения одного такого вращающегося звена может быть использован комплект из более чем одного измерительного датчика так, что если в одном из измерительных датчиков в комплекте возникнет неисправность, вместо него может быть использован другой.
В механизм можно не подавать питания постоянно. В некоторых вариантах выполнения, измерительные датчики измеряют положения вращающихся звеньев, достигнутые в результате движения без подачи на механизм питания. Для активизации измерительных датчиков, когда вращающееся звено(-я) начинает двигаться, в механизме может быть использован коммутатор.
В настоящем изобретении также предложен способ получения показаний многооборотного углового положения входного звена, при выполнении которого:
измеряют угловое положение комплекта вращающихся звеньев, вращающихся в процессе работы, в соответствии с вращением входного звена, при этом вращающиеся звенья выполнены для вращения одновременно, но с разной скоростью, и
получают показания многооборотного углового положения входного звена с использованием измерений углового положения, полученных от комплекта вращающихся звеньев,
причем комплект вращающихся звеньев включает по меньшей мере четыре вращающихся звена, и комплект измерительных датчиков включает по меньшей мере четыре измерительных датчика, выполненных с возможностью измерения и выдачи углового положения соответствующего одного из по меньшей мере четырех вращающихся звеньев,
каждое из вращающихся звеньев имеет любое, отличное передаточное отношение по скорости относительно других вращающихся звеньев, и
от одного из комплекта вращающихся звеньев прямо приводятся во вращение все остальные вращающиеся звенья.
В способе дополнительно:
выполняют измерения положения первого из вращающихся звеньев за промежуток времени;
выполняют измерения положения другого из вращающихся звеньев за промежуток времени;
сравнивают измеренное положение другого вращающегося звена с его ожидаемым положением, с учетом измеренных положений первого звена и известного соотношения между вращениями звеньев, и
если измеренное положение другого вращающегося звена не соответствует ожидаемому положению, выдают метку возможного состояния ошибки чтения.
Способ может включать проверку на ошибки чтения путем обнаружения отсутствия углового вращения по меньшей мере одного из вращающихся звеньев.
При выполнении способа могут определять абсолютное положение входного звена, используя данные, относящиеся к угловому положению одного из вращающихся звеньев, или комбинации положений подгруппы вращающихся звеньев. При выполнении способа, при обнаружении неисправности одного (или более) вращающихся звеньев:
измеряют угловое положение не отказавшего вращающегося звена(-ев), и
выдают показания углового положения входного звена в сокращенном многооборотном диапазоне, используя измерения углового положения не отказавшего вращающегося звена(-ев).
При выполнении способа могут дополнительно использовать по меньшей мере один суммирующий счетчик, связанный с по меньшей мере одним из вращающихся звеньев, и использовать выходные показания по меньшей мере одного суммирующего счетчика для вычисления положения входного звена, на основании подсчета числа многих оборотов по меньшей мере одного связанного вращающегося звена.
В соответствии с альтернативной особенностью настоящего изобретения, предложен способ получения показаний многооборотного углового положения входного звена, при выполнении которого:
измеряют положение нескольких вращающихся звеньев, которые в процессе работы двигаются в соответствии с движением входного звена, при этом каждое из вращающихся звеньев имеет условное нулевое/исходное/начальное (угловое) положение, и
вычисляют, насколько далеко вращающиеся звенья ушли от своих нулевых положений, для выдачи показаний многооборотного углового положения входного звена.
Также может быть использована компьютерная программа, приспособленная для выполнения по меньшей мере части в целом описанного здесь способа.
Предлагаемое в настоящем изобретение решение позволяет обеспечить больший рабочий диапазон, а также более высокие допуски на люфт в устройстве и более низкие требования к точности, что дает возможность использовать менее прецизионные и дорогие компоненты. Как будет более подробно раскрыто ниже, может также обеспечиваться такой дополнительный эффект, как возможность функционирования устройства в резервном режиме при отказе какого-либо из датчиков.
Изобретение может быть распространено на любой признак или любую допустимую комбинацию описанных здесь признаков, вне зависимости от того, указана здесь эта комбинация или нет.
Изобретение может быть выполнено различными способами, при этом описание и иллюстрация приводится только для одного примера выполнения со ссылками на чертежи, на которых:
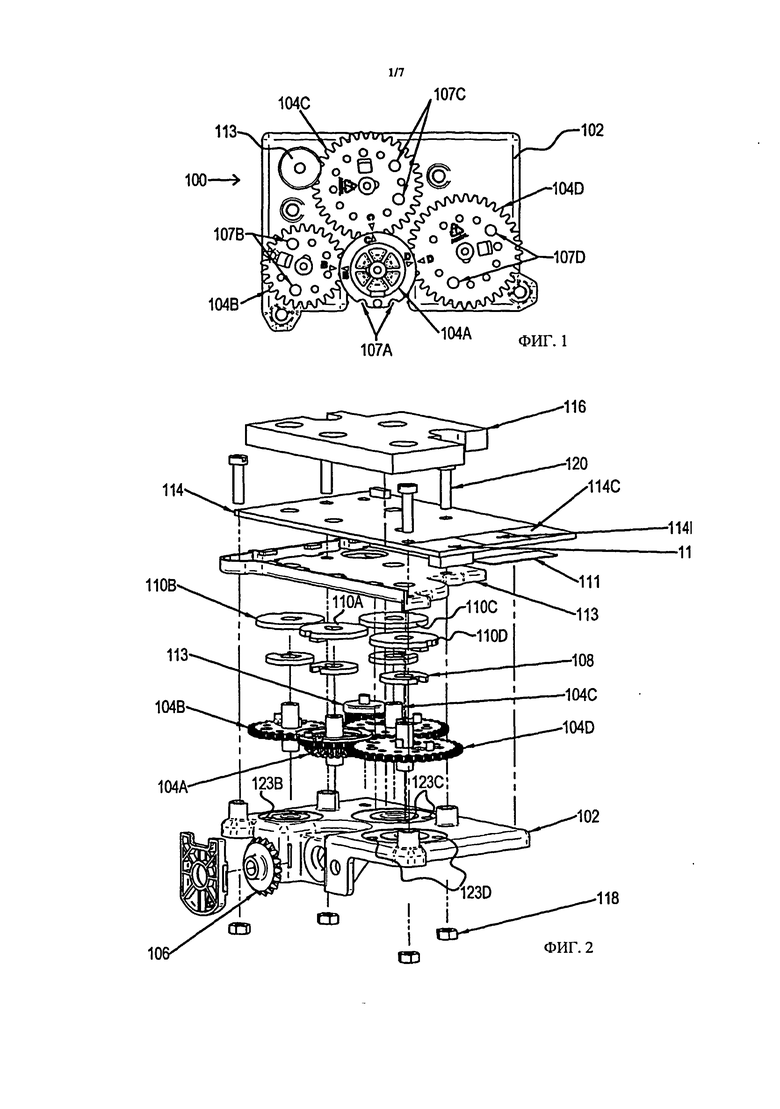
на фиг. 1 представлен вид в плане частного варианта выполнения в частично собранном виде;
на фиг. 2 представлен вид частного варианта выполнения с пространственным разделением деталей;
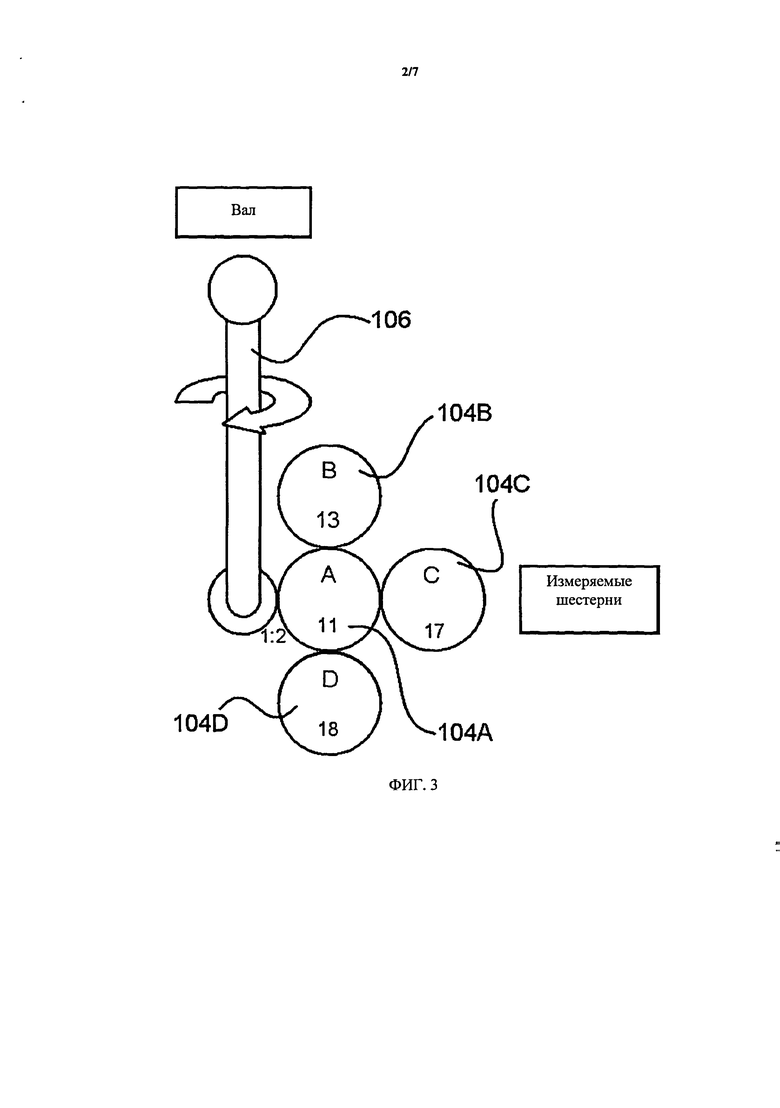
на фиг. 3 представлен схематический чертеж чувствительных датчиков в частном варианте выполнения;
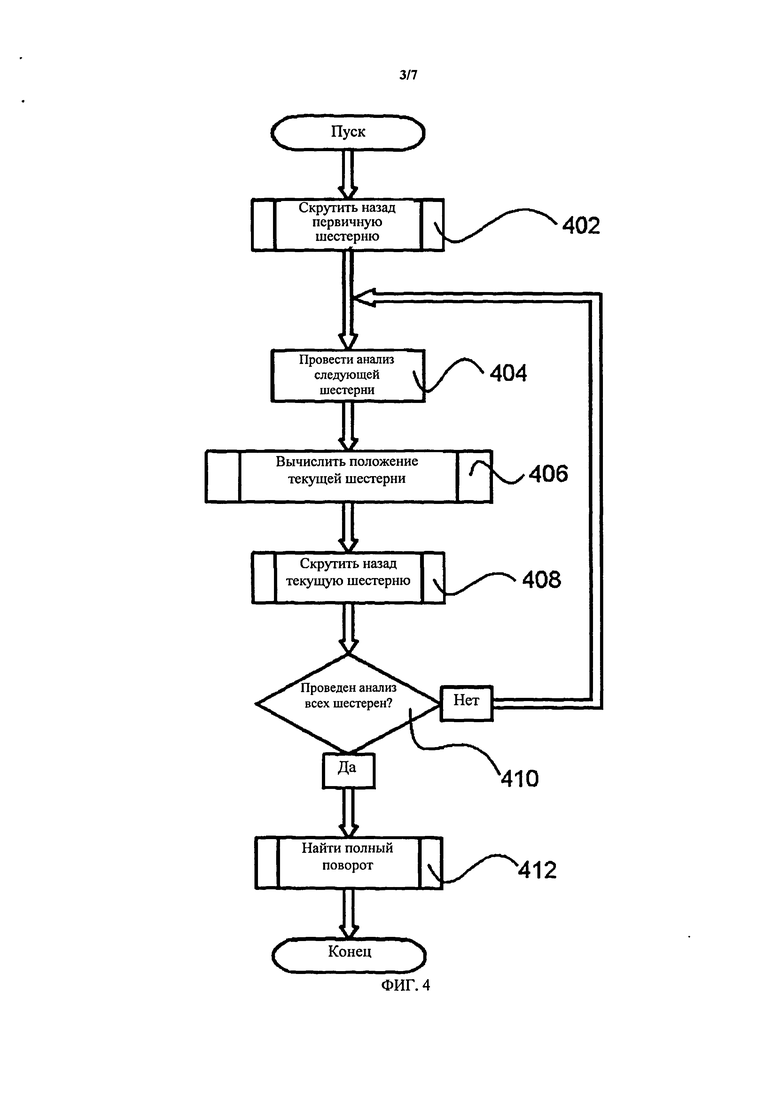
на фиг. 4 представлена блок-схема работы варианта выполнения, включая шаг вычисления положения и шаг "виртуального скручивания назад" зубчатой передачи;
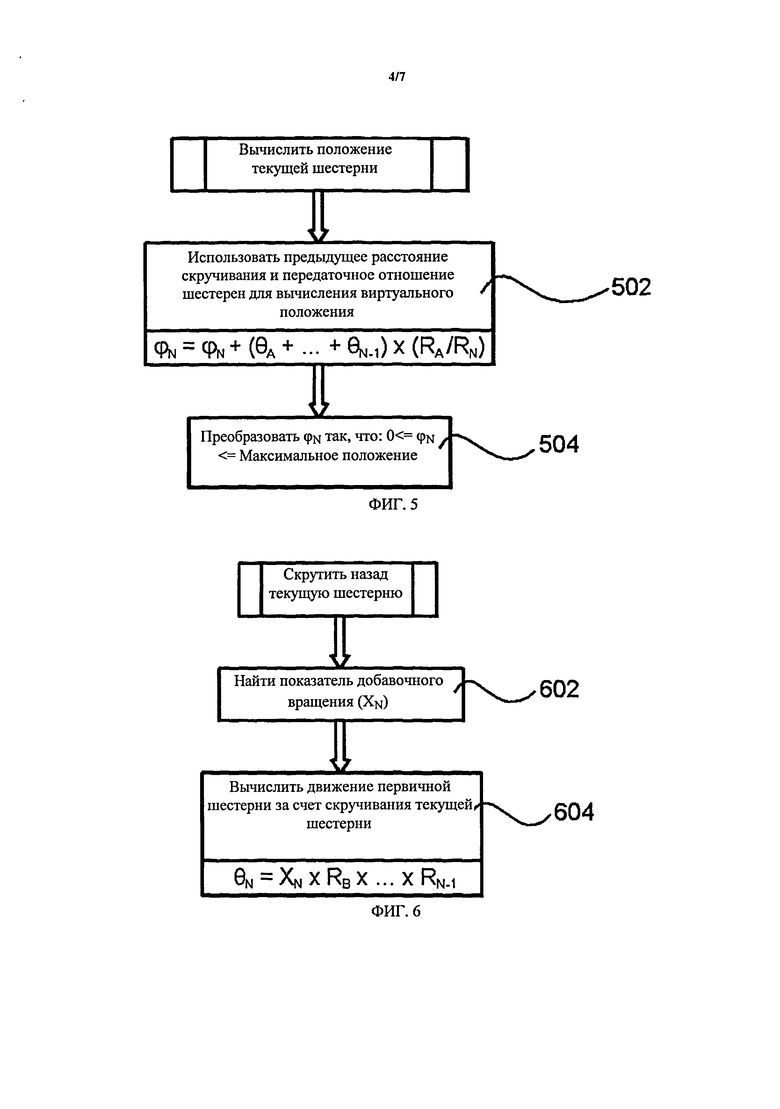
на фиг. 5 представлен подробно шаг вычисления положения;
на фиг. 6 представлен подробно шаг "виртуального скручивания назад" зубчатой передачи;
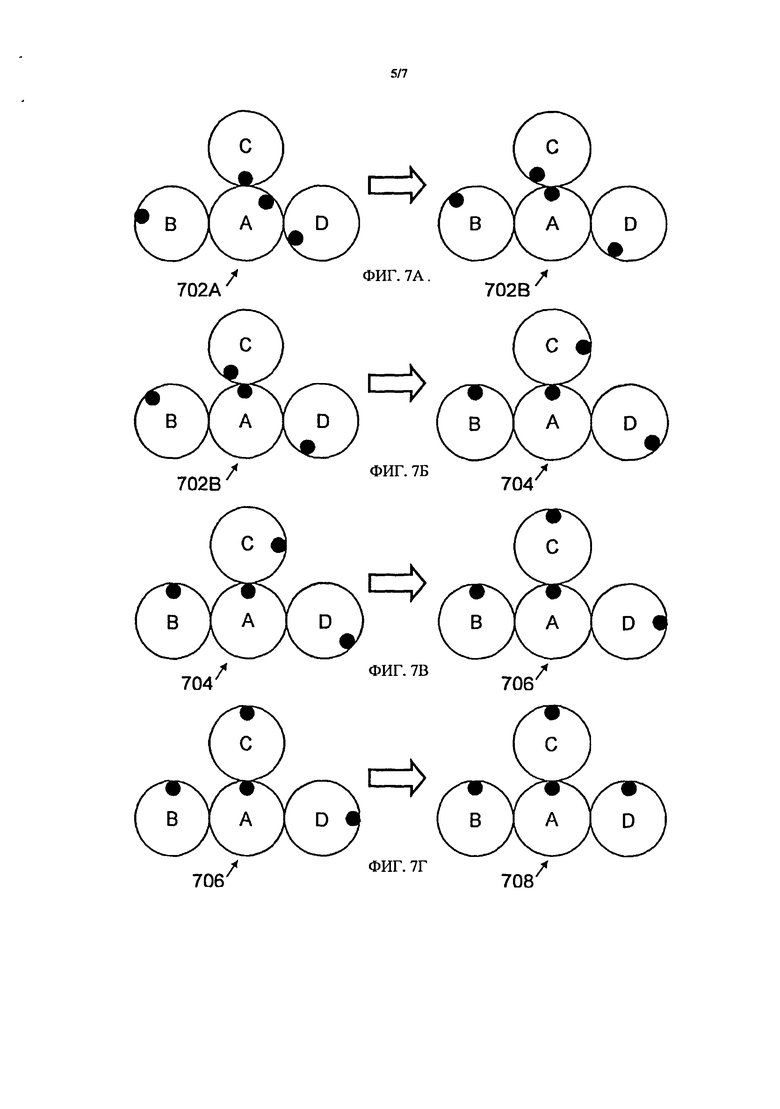
на фиг. 7А-7Г представлен пример работы варианта выполнения;
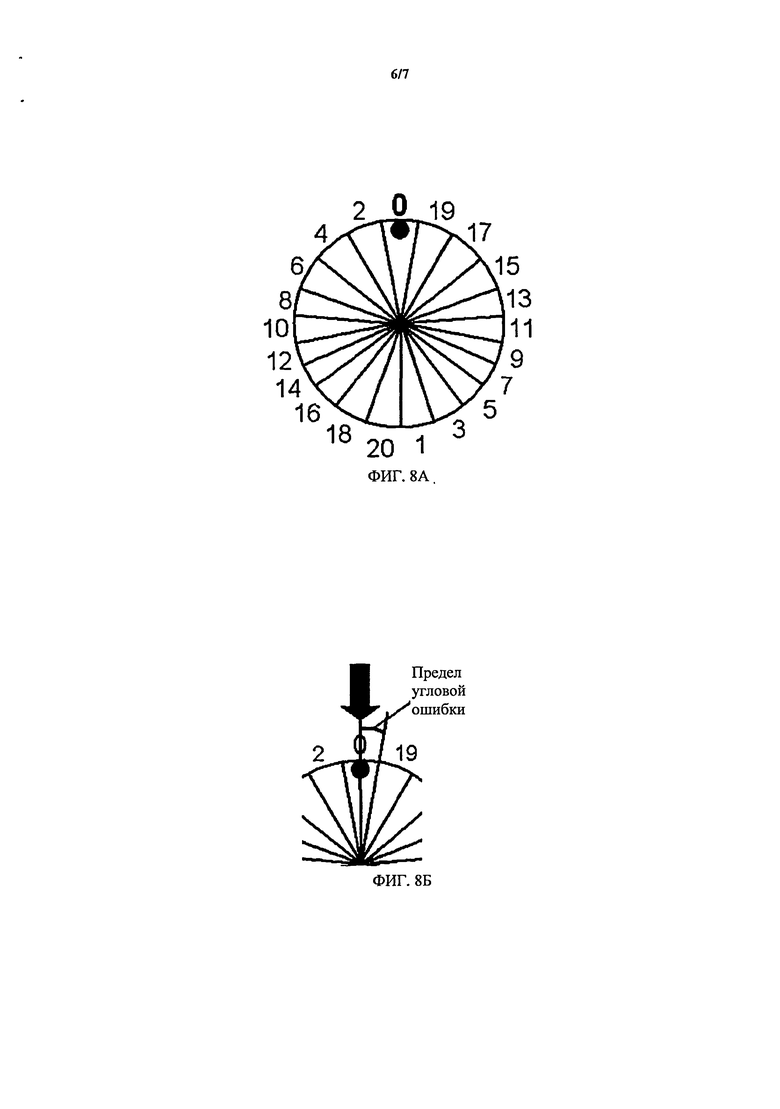
на фиг. 8А и 8Б иллюстрируется пример измерения угла вращающегося звена устройства, и
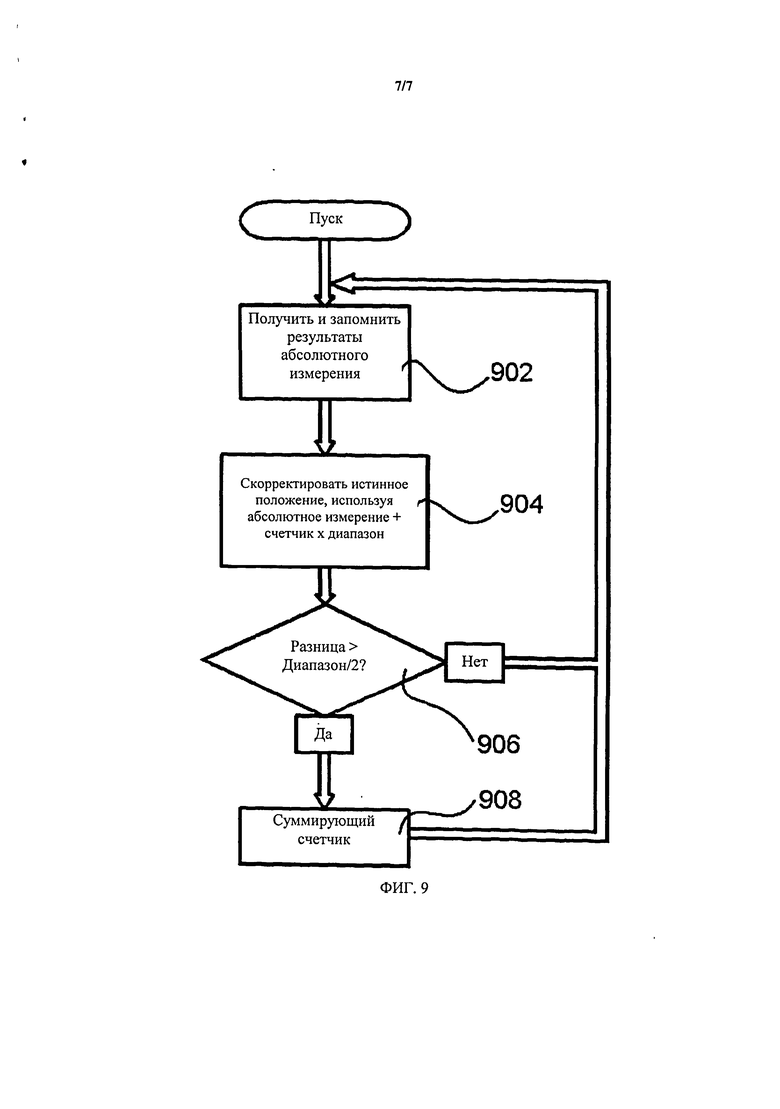
на фиг. 9 представлена блок-схема работы механизма, имеющего суммирующий счетчик.
На фиг. 1 и 2 представлен пример устройства 100 выдачи показаний положения. Устройство включает пластину 102 основания корпуса, на которой могут быть установлены вращающиеся звенья 104A-104D. В данном примере имеется четыре вращающихся звена в виде зубчатых шестерен 104A-104D. Следует, однако, иметь в виду, что могут быть использованы и вращающиеся звенья других типов, и они не обязательно должны иметь такие элементы, как зубья, для непосредственного соединения друг с другом.
Можно считать, что первая шестерня 104A является первичной шестерней, приводящей во вращение остальные три шестерни 104B-104D, т.е., три другие шестерни 104B-104D сцеплены только с зубьями первой шестерни, но не друг с другом. Первая шестерня приводится во вращение входной шестерней 106, вращающейся в соответствии со входным звеном, которое может представлять собой, например, вал привода клапана (см. фиг. 3). При этом первая шестерня приводится во вращение непосредственно входной шестерней 106, в то время как три другие шестерни 104B-104D приводятся во вращение входной шестерней опосредованно (через посредство первой шестерни 104А). Следует иметь в виду, что в других вариантах выполнения входная шестерня может непосредственно приводить во вращение более одной или все шестерни.
В приведенном в качестве частного примера устройстве 100 шестерни 104A-104D установлены при сборке в свои правильные "нулевые положения". Для этого, одна или более шестерен (и (или) элементов корпуса) могут иметь метки. В данном примере, первая шестерня 104 имеет метки в форме трех стрелок. Эти стрелки должны совмещаться с соответствующими метками-стрелками на других шестернях 104B-104D. Дополнительно или в альтернативном варианте, на шестернях могут быть сделаны "отверстия нулевого положения" 107A-107D, которые могут быть совмещены с соответствующими метками/углублениями 123B-123D на пластине 102 основания (некоторые показаны на фиг. 2). В качестве приспособления для сборки могут использоваться кондукторы (не показаны). На устройстве 100 может быть прикреплена этикетка 111 со штриховым кодом, а также верхняя накладка 116 из пенопласта.
В приведенном в качестве примера устройстве, шестерни и компоненты корпуса содержат формованные пластиковые детали. Благодаря высоким допускам на люфт в устройстве и низким требованиям к точности, могут быть использованы подобные дешевые компоненты. Следует, однако, понимать, что могут быть использованы и другие материалы, и конструкция и размеры устройства могут отличаться от показанного примера. Преимуществом использования единого привода в форме шестерни 104A, как в показанном примере, является снижение влияние люфта, однако, могут быть использованы и другие схемы построения, например с последовательно включенными шестернями, приводящими в движение друг друга.
В примере на фиг. 1 и 2 каждая из четырех шестерен 104A-104D оснащена компонентами 110A-110D для связи с соответствующими датчиками, например магнитами для магнитного датчика. Между шестернями и компонентами 110 установлены разделительные кольца 108. Над компонентами расположена верхняя пластина 113 корпуса, на которой также размещена плата 114 печатной схемы. На плате находятся схемы измерительного датчика (обозначен как 114A), который может воспринимать положение компонентов 110A-110D и выдавать измеренное абсолютное измеренное положение четырех шестерен в пределах 360°. Принцип действия датчика может быть основан на любом способе определения углового положения, например оптическом, магнитном или радиочастотном. Радиочастотные и магнитные датчики также обладают встроенным определением неисправности: если магнит отделится от шестерни или размагнитится, датчик сможет это обнаружить. Также можно использовать измерительные датчики с аналоговым выходным сигналом.
Предполагается, что в альтернативных вариантах выполнения вращающиеся звенья могут включать интегрированные компоненты связи с датчиками, либо их угловые положения могут определяться датчиком другим путем, например визуальной идентификацией углового положения, например, по метке на поверхности вращающегося звена. Следует понимать, что в альтернативных вариантах измерительный датчик и (или) процессор могут располагаться отдельно от других компонентов устройства с передачей сигналов, например, по беспроводному/радиоканалу. Могут быть использованы и другие варианты частного примера устройства 100, показанного на чертежах. Например, вращающиеся звенья могут быть расположены коаксиально, а не копланарно (либо может использоваться коаксиально/копланарная комбинация расположения, либо любой иной вариант), благодаря чему можно получить выигрыш в размерах или простоте конструкции.
Схема 114 также включает процессор (схематически обозначен 114B), выполненный с возможностью выдавать показания положения входного звена 106 в пределах многих оборотов, используя результаты измерений измерительного датчика, как будет описано ниже. Хотя в примере показан цифровой электронный процессор, следует иметь в виду, что его функции могут быть выполнены подходящими аналоговыми компонентами (схемами).
Может также быть использован механический коммутатор для активизации электронных схем датчиков при начале движения измерительных датчиков/шестерен. Коммутатор может иметь механическую или магнитную активизацию, поэтому нет необходимости постоянно подавать мощность питания на устройство, благодаря чему, в результате, снижается общее энергопотребление устройства. После включения, устройство может обнаруживать любое перемещение, происшедшее при отключенном питании, и использовать это измерение для выдачи показаний положения. Частный вариант устройства включает магнитный датчик движения в форме шестерни 113, вращающейся при вращении зубчатого механизма, который может быть использован для включения источника питания устройства, однако могут быть использованы и другие варианты.
Вращающиеся звенья устройства выполнены с возможностью вращения с различными скоростями. В частном варианте устройства 100 это достигается благодаря различному числу зубьев на всех шестернях 104A-104D. Следует, однако, понимать, что это может быть достигнуто различными средствами. Например, использованием сцепляющихся вращающихся звеньев, имеющих различные размеры (например радиус или длину окружности), можно получить звенья с различным передаточным соотношением по скоростям. Кроме того, могут быть использованы вращающиеся звенья, которые не имеют непосредственного сцепления друг с другом и не приводят непосредственно друг друга во вращение, например диски, звенья, приводимые во вращение непосредственно входным звеном или соединенные друг с другом ременной или цепной передачей, либо иным передаточным механизмом.
Рабочий диапазон устройства будет определяться вычислением максимального числа оборотов первого анализируемого, или "первичного", звена перед возникновением повторения расположения вращающихся звеньев, когда абсолютное положение больше не может быть определено по положениям отдельных звеньев. Абсолютное положение может быть вычислено как число витков, необходимых для поворота устройства из его исходного положения, пока оно не вернется в это положение. Для увеличения этого диапазона могут быть увеличены минимальные функции передаточных отношений.
Например, в простом случае, когда устройство включает два вращающихся звена A и B, если передаточные отношения двух звеньев составляют 10 и 20, соответственно, то эти отношения имеют общий множитель, равный 10, и соотношение может быть упрощено до 1:2. Такая сборка может быть использована для выдачи показаний положения только в пределах двух оборотов. Однако, если была выбрана шестерня В с 21 зубом вместо 20, тогда уже не будет такого общего множителя, и простейшее соотношение останется как 10:21. Учитывая это соотношение, при двух оборотах шестерни А шестерня В переместится в положение 342,9° (720° × 10/21) из своего нулевого положения. Поскольку оба звена не достигли своего исходного положения, и устройство не вернулось в свое общее исходное положение, диапазон этого устройства может быть рассчитан как число оборотов, которое должно сделать звено A, чтобы звено В одновременно попало в нулевое положение, т.е. 21 оборот. Когда звено B сделает точно 10 оборотов, оба звена A и B окажутся в нулевом положении, и устройство в целом будет в исходном положении.
В обычной схеме построения многооборотного абсолютного датчика положения используется механический механизм индексации между звеньями, ступенчато смещающий каждое звено после определенного поворота предыдущих звеньев, т.е., если звено было смещено определенное число раз, это означает, что предыдущие звенья были повернуты на определенную величину. Однако подобный индексирующий механизм отсутствует в описанном здесь непрерывно перемещающемся (вместе со входным звеном), бесступенчатом датчике положения. Напротив, варианты выполнения устройства могут иметь виртуальный механизм индексации, который может иметь форму описанного ниже алгоритма декодирования. Исходные (или начальные/нулевые) положения определяются для каждого вращающегося звена и могут лежать в любой точке возможного 360° диапазона поворота, при условии, что каждое звено движется так, что все звенья могут быть в их исходных положениях одновременно. Этим обычно определено нулевое положение устройства в целом.
Такой "виртуальный механизм индексации" действует как измерение произвольных кажущихся положений и позволяет декодировать их для получения действительных положений. В обычных механизмах индексации, каждое звено измеряется последовательно, и каждое добавляет пропорциональную часть значения положения, в зависимости от механизма. Эта информация становится известной сразу же после считывания. Однако в вариантах выполнения настоящего устройства может и не быть столь очевидного соотношения. Для декодирования положения производится измерение каждого звена с последующим декодированием. Первичное звено должно быть использовано для нахождения положения "обратного скручивания" следующего вращающегося звена. На этом шаге вычислений получают информацию, непосредственно относящуюся к абсолютному положению входного звена. Для получения абсолютного положения, выполняется измерение угловых положений вращающихся звеньев, после чего выполняются вычисления для нахождения вращательных вкладов с тем, чтобы можно было выполнить следующее вычисление и т.д.
В примере, показанном на фиг. 3, число зубьев четырех шестерен 104A-104D выбрано следующим: шестерня 104A - 22 зуба, шестерня 104B - 26 зубьев, шестерня 104C - 34 зуба и шестерня 104D - 36 зубьев, таким образом, минимальные функции передаточных отношений по скорости шестерен 104А-104D составляет 11, 13, 17 и 18 соответственно. Указанные частные передаточные отношения означают, что скорость вращения шестерни 104A будет составлять 13/11 скорости вращения шестерни 104B, а скорость вращения шестерни 104D будет составлять 17/18 скорости вращения шестерни 104C и т.д. У этих отношений отсутствует целочисленный общий множитель. Однако, если передаточные отношения составляют, например, 11, 13, 15 и 18, тогда существует общий множитель 3 (для 15 и 18), что повлияло бы на совместное перемещение шестерен и на то, сколько оборотов может сделать входное звено до повторения положения шестерен, в результате абсолютный диапазон оказался бы сокращенным.
Когда первая шестерня 104A используется в качестве первичной измеряемой шестерни, максимальное количество оборотов этой шестерни, по которому может быть определено абсолютное положение механизма, равно произведению минимальных функций передаточных отношений по скорости шестерен 104A-104D. Таким образом, в целом, комбинация из n шестерен (обозначенных A, B, C, …, n) может быть использована для определения абсолютного положения шестерни в пределах X оборотов. Если первая шестерня 104A используется в качестве первичной измеряемой шестерни, тогда диапазон определения абсолютного положения устройства может быть определен из уравнения:
Х=В×С×D…×n,
где В, С, D, … n представляют собой минимальные функции передаточных отношений по скорости между каждой шестерней, и отсутствует общий множитель между минимальными функциями передаточных отношений по скорости всех измеряемых элементов. Таким образом, для примера, показанного на фиг. 3, X=3978 (13×17×18). В другом примере, число зубьев на четырех шестернях равно: шестерня 104А - 7 зубьев, шестерня 104В - 11 зубьев, шестерня 104С - 13 зубьев и шестерня 104D - 15 зубьев, в этом случае Х=2145.
Для того чтобы найти полное число оборотов входного звена 106, каждая из шестерен 104A-104D фактически "скручивается обратно" к своим нулевым положениям. В процессе скручивания, общее число оборотов регистрируется так, что оно может быть соотнесено с положением входного звена. В частном варианте устройства, сначала регистрируется вращение первой шестерни 104А. При этом, зарегистрировав, сколько оборотов было сделано каждой шестерней устройства, можно рассчитать текущее многооборотное положение входного звена. Следует иметь в виду, что обычно физического вращения назад шестерен не происходит; например, может быть использовано программное/программно-аппаратное моделирование или иные процессы для расчета числа движений/поворотов, либо любая другая электромеханическая или электронная реализация этого процесса.
На фиг. 4 показана блок-схема частного способа вычисления полного числа оборотов. Приведенные ниже обозначения используются в следующем далее описании, причем шестерни 104A-104D обозначаются как "A"-"D" соответственно:
φA: Положение шестерни А;
φB: Положение шестерни В;
φC: Положение шестерни С;
φD: Положение шестерни D;
PR: Первичное передаточное отношение (1:2 в примере на фиг. 3, т.е., двум оборотам входного вала соответствует один оборот первичной шестерни А);
RA: Передаточное отношение шестерни А по зубьям (11 в приведенном примере, т.е., число зубьев шестерни с исключенным общим множителем);
RB: Передаточное отношение шестерни B по зубьям (13 в приведенном примере);
RC: Передаточное отношение шестерни C по зубьям (17 в приведенном примере);
RD: Передаточное отношение шестерни D по зубьям (18 в приведенном примере);
θполное: Полное число оборотов шестерни A;
θA: Число оборотов шестерни A при обратном скручивании шестерни A;
θ*B: Число оборотов шестерни A при обратном скручивании шестерни B;
θC: Число оборотов шестерни A при обратном скручивании шестерни C;
θD: Число оборотов шестерни A при обратном скручивании шестерни D;
XB: Число нулевых циклов от шестерни B;
XC: Число нулевых циклов от шестерни C;
XD: Число нулевых циклов от шестерни D.
На шаге 402 первичную шестерню 104А виртуально "скручивают назад" к ее нулевому положению. Требующееся для этого число оборотов соответствует ее текущему положению φA, поэтому θA=φA.
На шаге 404 начинается анализ, относящийся к следующей шестерне в устройстве. Шестерни рассматриваются по порядку, начиная с той, что имеет наименьшее число зубьев (после шестерни A), и продолжается по порядку до шестерни с наибольшим числом зубьев, хотя может быть использован любой порядок. Таким образом, в первой итерации этих шагов выполняется анализ шестерни B. В формулах, показанных на блок-схемах и рассмотренных ниже, буква N используется для обозначения текущей рассматриваемой шестерни. На шаге 406 вычисляют положение шестерни B. Фиг. 5 иллюстрирует шаги, выполняемые в процессе этого вычисления. На шаге 502 полученное ранее расстояние обратного скручивания и передаточное отношение шестерни используют для вычисления нового положения φB шестерни B, с использованием общей формулы, показанной на фиг. 5, которая, применительно к B, приобретает вид:
ФB=(θA)×(RA/RB).
Как будет показано ниже, ФB будет использовано со справочной таблицей для определения количества происшедших последовательных прохождений через ноль.
На шаге 504 угол φB преобразуется таким образом, чтобы он попадал между нулевым и максимальным значением. Это преобразование представляет собой операцию сброса полного оборота, в результате которой выдается сигнал положения между 0,0 и 360,0°. Например, если измерение дает 345°, а передаточные отношения составляют RA 23 и RB=21, то значение φB составит 345×23/21=377,86° и может быть подвергнуто операции сброса вычитанием 360° с получением 17,86°. Величина θA может быть более 360°.
На шаге 408 (фиг. 4) шестерня В "скручивается назад" в свое нулевое положение. На фиг. 6 подробно приведены шаги этой операции. На шаге 602 определяется показатель добавочного вращения шестерни (т.е., сколько раз все предшествующие по порядку шестерни вместе прошли через свои нулевые положения) XN с помощью справочной таблицы (которая рассматривается ниже). На шаге 604 вычисляется движение первичной шестерни (A) за счет скручивания назад текущей шестерни до ее нулевого положения с использованием общей формулы, показанной на фиг. 6.
На шаге 410 (см. фиг. 4) выполняется проверка того, все ли шестерни в устройстве были подвергнуты анализу. Если не все, то управление возвращается на шаг 404, где упомянутые выше шаги 406-408 выполняются для шестерни C (а затем и для шестерни D). Если был проведен анализ всех шестерен, тогда управление переходит от шага 410 на шаг 412, где вычисляется полное число оборотов входного вала. Для этого вычисляется абсолютное положение входного звена с использованием полного вращения первичной шестерни (A) и первичного передаточного отношения:
Положение = первичное передаточное отношение × (θA+…+θN).
Далее приводится практический пример со ссылкой на фиг. 7А-7Г. На фиг. 7А показаны шестерни A-D в некотором состоянии на схеме 702А, когда производится измерение абсолютного положения. Как было показано выше, первый шаг (шаг 402 на фиг. 4) состоит в "скручивании назад" первичной шестерни A до нулевого положения, как схематически/мысленно показано схемой 702 В (кружок на диске шестерни показывает ее текущие положения, и все нулевые положения находятся при 0°). Это может быть выполнено скручиванием назад шестерни A из текущего положения в нулевое положение, с регистрацией величины угла поворота. Например, если шестерня A находится в положении 57,43°, скручивание ее назад эквивалентно повороту ее на -57,43°. Зная, что шестерня А была мысленно повернута на этот угол, можно определить, насколько повернутся другие шестерни с учетом их передаточных отношений.
Далее, когда шестерня A мысленно помещена в ее нулевое положение, рассчитывается положение следующей шестерни (шестерня B) с учетом передаточных отношений и величины мысленного поворота шестерни A. Затем выполняется мысленное скручивание назад шестерни В так, что обе шестерни А и В оказываются в своих нулевых положениях, как схематически показано схемой 704 на фиг. 7Б. Эта операция может включать несколько оборотов шестерни В, поскольку, когда в системе двигается одна шестерня, остальные шестерни также поворачиваются. Этот процесс продолжается пока все шестерни зубчатого механизма мысленно не возвращаются в свое нулевое положение.
Рассчитывается новое положение шестерни В (шаг 406), поскольку шестерня А была откручена назад. Это изменение положения шестерни В может быть определено по полному числу оборотов, требующихся для возвращения шестерни А в ее нулевое положение, с учетом передаточных отношений. Поскольку эта величина представляет вращательное угловое положение, следует учесть прохождения через ноль, или полные обороты:
Это выражение дает число оборотов, на которое следует повернуть шестерню A для достижения ею ее нулевого положения одновременно с достижением шестерней В ее нулевого положения (шаг 408). Эта величина регистрируется и добавляется к вращениям, полученным при скручивании назад шестерни A.
Процедура вращений каждой следующей шестерни идентична процедуре вращения назад шестерни B: в основе каждой процедуры лежит положение после скручивания предыдущей шестерни с учетом передаточных отношений между различными частями. Сначала вычисляется положение шестерни C, исходя из полного числа оборотов скручивания назад, на данный момент, шестерни A, и по нему с использованием справочной таблицы определяется число одновременных пересечений нуля предыдущими шестернями A и B. Затем это используется для нахождения числа оборотов, на которые должна быть повернута первая шестерня A, чтобы шестерни A, B и C вместе заняли свои нулевые положения (схематически показано схемой 706 на фиг. 7В). Эта величина перемещения равна числу раз, которое шестерни A и B находились вместе в нулевом положении, умноженному на относительные передаточные отношения перемещения шестерни В (13 в данном примере). Эти числа обусловлены необходимостью одновременного нахождения пары шестерен A и B в их нулевых положениях; при этом шестерня A должна повернуться на угол, кратный 13, чтобы шестерня B находилась в ее нулевом положении. После завершения этого процесса, шестерни A, B и С должны находиться в нулевых положениях, и выполняется анализ шестерни D:
θC=XC×RB.
Процесс анализа шестерни D идентичен процессу анализа шестерни C, за исключением того, что первая шестерня должна поворачиваться число раз, кратное 17, для обеспечения условия, что шестерня C должна остаться в нулевом положении:
θD=XD×RB×RC.
После того как проведено виртуальное скручивание назад всех шестерен А-D в их нулевые положения (схематически показано схемой 708 на фиг. 7Г), на последнем шаге определяется полный поворот первой шестерни от каждой скрученной назад шестерни, суммируются эти повороты, и полученная величина соотносится с входным валом через первичное передаточное отношение, т.е.:
θполное=θA+θB+θC+θD ,
Абсолютное положение = P.R.×θполное .
Как упоминалось выше, справочные таблицы могут быть использованы для определения того, сколько раз предшествующие шестерни в устройстве пересекали свои нулевые положения, с тем, чтобы рассчитать текущее положение для конкретной шестерни. После этого "скрученное назад" положение рассматриваемой шестерни может быть сопоставлено с этими хранимыми положениями, и соответствующее положение использовано для получения числа нулевых последовательностей предшествующих шестерен. Следует иметь в виду, что описанный метод является методом по выбору, и прохождение нулевых положений может быть определено другим математическим методом, либо по данным, сохраненным другим способом. Примеры справочных таблиц для частного варианта устройства, показанного на фиг. 3, приведены ниже:
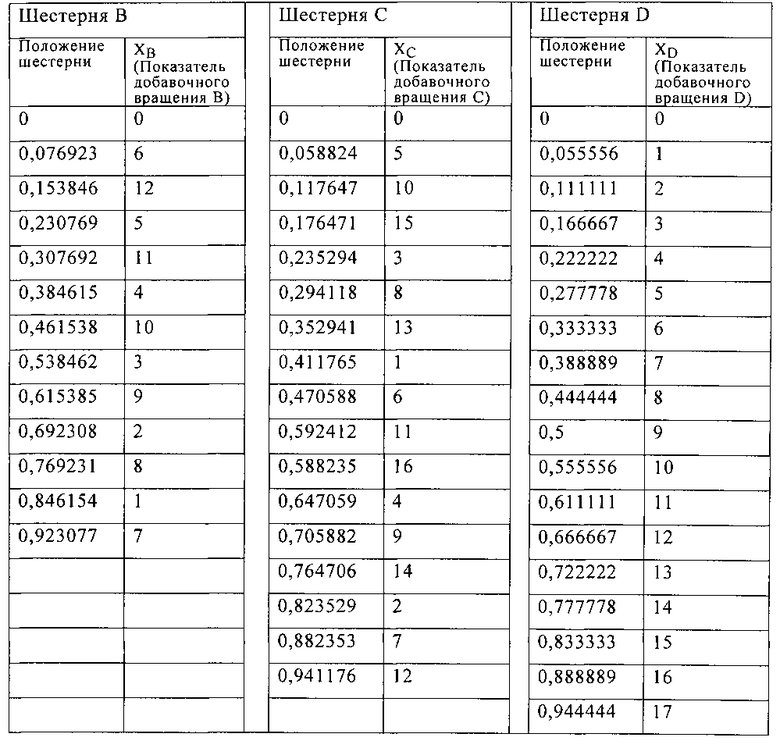
Левый столбец в таблице для каждой шестерни B-D показывает положение этой шестерни, когда предыдущая шестерня или все предыдущие шестерни по порядку/очередности (A, B и C) находятся в своих нулевых положениях. Правый столбец в таблице этой шестерни показывает, сколько раз все предшествующие шестерни вместе проходили через свои нулевые положения, когда шестерня находится в соответствующем положении, указанном в левом столбце. Таким образом, используя эту таблицу, можно найти число нулевых положений, пройденных предшествующими шестернями, путем сравнения вычисленного положения шестерни с теоретическим положением и подбора наиболее близких значений. Важно отметить, что если положение шестерни ближе к полному обороту, т.е. 1, чем к следующему наибольшему значению, то это положение рассматривается как полный оборот, и является, таким образом, нулевым положением.
Справочные таблицы могут генерироваться путем поворота шестерен через их нулевые положения и регистрации положений шестерни на каждом цикле, пока он не начнет повторяться. Это может быть выполнено, например, путем программного моделирования. Если говорить более подробно, то для вычисления секции справочной таблицы, относящейся к шестерне B, требуется пройти через нулевые циклы шестерни A, поскольку эта единственная шестерня, предшествующая шестерне B. Шестерня B будет иметь 13 различных положений для каждого нулевого положения шестерни A перед повторением. После 13 полных оборотов шестерни A, обе шестерни A и B вновь вместе окажутся в своих нулевых положениях. Ниже приводится пример вычисления:
Число нулевых циклов шестерни A = 2,
ϕB=1,6923→ϕB=0,6923 .
В общем случае:
Расчет таблицы для шестерни C аналогичен расчету для шестерни B. Здесь, однако, требуется рассчитать 17 положений полного оборота до повторения последовательности. Нулевой цикл должен также включать шестерню B. При этом общее уравнение имеет вид:
Расчет для шестерни D следует той же логике, и здесь имеется 18 уникальных положений, а нулевые циклы включают шестерню C. Уравнение для шестерни D имеет вид:
Надо иметь в виду, что вращающиеся звенья могут подвергаться анализу в любой последовательности (например не обязательно начинать с шестерни 104A). Анализ может проводиться в любом порядке, если только для соответствующего порядка имеются рассчитанные справочные таблицы.
Когда ошибка измерения при определении положений отдельных шестерен становится слишком большой, алгоритм может давать неточные значения. До этого момента, ошибка устройства будет равна ошибке измерения положения первой измерительной шестерни, умноженной на первичное передаточное отношение.
Максимально допустимая максимальная погрешность измерительного датчика(-ов) до момента, когда работа алгоритма становится неудовлетворительной, может быть определена как:

Таким образом, для принятых в настоящем примере передаточных отношений не требуется датчиков с высокой точностью. Датчики могут быть относительно грубыми, если только их максимальная ошибка не превышает 180°/(RA+RN). При этом разрешение определения положения зависит только от выбранной первой шестерни. Для получения высокоточного многооборотного устройства определения положения может быть использован n-1 датчик с низкой точностью и один датчик с очень высокой точностью.
Максимальная суммарная погрешность устройства может быть найдена как точка, в которой положение вращающегося звена с максимальным передаточным отношением, а значит и с минимальным угловым расстоянием между каждыми расчетными последовательными нулевыми положениями, не может быть достоверно определено. Это случается, когда общая ошибка для звена больше расстояния между двумя последовательными нулевыми положениями предыдущих звеньев, разделенного пополам, поскольку в этой точке рассчитанное "скрученное назад" положение окажется ближе к неправильному положению по справочной таблице.
Для наглядного представления этого положения, каждое из вращающихся звеньев (за исключением первичного звена) может быть мысленно разбито на сектора. Каждый их этих секторов представляет интервал положений, для которого "скрученное назад" положение может рассматриваться относящимся к соответствующему числу нулевых последовательностей предшествующих звеньев, в соответствии с перечисленными в справочных таблицах. Частный вариант вращающегося звена с 21 сектором показан на фиг. 8А, при этом соответствующие сектора обозначены в соответствии с показателем добавочного вращения. Вращающееся звено показано в своем исходном положении точно по середине нулевого сектора. Теоретически, измерение звена всегда должно проводиться в таком положении, чтобы шаг "вычислить положение" вычислений со скручиванием назад предшествующих звеньев всегда давал значение, точно соответствующее середине одного из секторов, т.е., положению из справочной таблицы. Однако, когда из-за наличия ошибки вычисленное положение смещается в соседний сектор, происходит существенное увеличение выходной ошибки, поскольку изменится число последовательных нулевых положений предшествующих звеньев, причем это изменение может быть очень большим. Такая угловая ошибка показана на фиг. 8Б.
С учетом двух основных видов ошибки, а именно, ошибки измерения и механической ошибки (люфт), максимальную допустимую ошибку можно найти, рассмотрев точку, в которой величина последовательных прохождений нулей, полученная при анализе звена с максимальным передаточным отношением, оказывается неверной. Люфт прямо влияет на положение относительно первичного звена. Ошибка измерения воздействует на результат двояко. Во-первых, она просто искажает измеренную величину, определяющую положение звена, а во-вторых, искажает величину положения первичного звена, которая далее транслируется в положение анализируемого звена в процессе первого этапа вычислений, т.е. при "обратном скручивании" первичного звена. Если эта величина неточна, то при расчете последнего известного положения последовательного прохождения через ноль предшествующего звена возникнет дальнейшее расхождение между расчетным и фактическим значениями.
Математически допустимая погрешность может быть выражена следующим образом:
где EN представляет ошибку измерения положения анализируемого звена N; EA является ошибкой измерения положения первичного звена; и BAN представляет люфт между первичным звеном и N.
Величину  можно рассматривать как полную ошибку устройства, предельным значением которой является
можно рассматривать как полную ошибку устройства, предельным значением которой является  . Если полная ошибка окажется не меньше предельной ошибки для всех звеньев, то процедура определения положения работать не будет.
. Если полная ошибка окажется не меньше предельной ошибки для всех звеньев, то процедура определения положения работать не будет.
Другой возможностью проникновения ошибки в устройство является временная задержка между измерениями положений каждого вращающегося звена. При этом в уравнение добавляется другой член:


где TdN представляет собой задержку измерения положения n звена; TdA представляет задержку измерения положения первичного звена; vN представляет скорость вращения звена N; и vA представляет временную задержу измерения положения звена N. Ошибка этого типа может быть исключена использованием симметричного алгоритма считывания, при котором измерения положения каждого звена выполняются вокруг одного момента времени. При этом устраняются факторы, вызывающие отказ алгоритма декодирования, поскольку каждое измерение, по существу, происходит в один момент времени (в предположении равномерного движения). При этом, однако, могут возникать ошибки, связанные с ускорением, но ускорение, которое могло бы повлиять на результат, должно быть весьма большим, а на практике временные задержки очень малы.
В некоторых вариантах выполнения устройства существует вероятность того, что все вращающиеся звенья не могут быть одновременно установлены в нулевое положение. Это может случиться, например, если отсутствует гарантия того, что звенья при сборке установлены в правильные относительные положения. Существуют способы попытаться обеспечить, чтобы этого не произошло, например, использовать зубчатые шестерни, число зубьев которых равно минимальной функции вращения (например, в случае с тремя вращающимися звеньями с передаточными отношениями 10, 21 и 17, если эти шестерни являются зубчатыми шестернями с 10, 21 и 17 зубьями), и правильно выставленные датчики для кинематической схемы. Такая схема обеспечит установку звеньев только с интервалами в полный сектор, в то время как с шестернями по 20, 42 и 34 зуба будет возможность установки шестерни, повернутой на половину полного сектора. Одно возможное решение этой задачи состоит в использовании процесса сборки, предотвращающего неправильную сборку, например может быть использована жесткая механическая конструкция в качестве направляющей, предотвращающей неправильную сборку, или кондуктора/формы, например, упомянутой выше 105 или 107. Другим решением может быть выполнение измерений при первом включении устройства, и расположение вращающихся звеньев может рассчитываться из этого положения с использованием при вычислениях этапа "обратного скручивания" и известных положений вращающихся звеньев, получившихся при сборке.
Для решения проблемы отказа одного или более датчиков, могут быть использованы один или более резервных датчиков, связанных с одним или более вращающихся звеньев так, что если происходит отказ какого-либо датчика, вместо него может использоваться резервный датчик. Для этого могут использоваться, например, радиочастотные или магнитные датчики, поскольку магнитные и радиочастотные поля охватывают большую площадь. Резервный датчик может быть помещен с противоположной стороны относительно оси вращения вращающегося звена, либо где-нибудь в другом месте, например между основным датчиком и звеном, либо за основным датчиком. Если такой способ окажется неподходящим для практически реализуемого варианта выполнения, то можно просто отбрасывать данные отказавшего датчика и использовать устройство с ограничением абсолютного диапазона. Учитывая обнаружение неисправности датчика 104B на фиг. 1 и 2, устройство будет использовать данные, основанные на остальных трех вращающихся звеньях 104A, 104C и 104D. Это будет означать сокращение рабочего диапазона, однако для некоторых применений такой диапазон может быть достаточным. В этом режиме может потребоваться создание/использование новой справочной таблицы, основанной на соотношениях между остальными вращающимися звеньями.
В режиме работы с уменьшенным диапазоном может оказаться необходимым расширить диапазон устройства на большее число оборотов, чем это обычно было бы возможно. Для этого суммирующий счетчик (схематически обозначенный как 114C на фиг. 2) может быть использован для подсчета числа прохождений системы через ее полный диапазон. При такой работе в состоянии отказа, механизм может потерять способность надежно давать данные точного положения после восстановления подачи питания в случае, если устройство имело большое перемещение (например, более половины сокращенного диапазона) при отключенном питании. Пример работы устройства в режиме с сокращенным диапазоном показан на фиг. 9. В этом режиме при потере данных суммирующего счетчика, абсолютное положение устройством определено быть не может. На шаге 902 выполняют абсолютное измерение положения одного из звеньев, сохранивших работоспособность. На шаге 904 вычисляют истинное положение звена путем добавления числа оборотов звена, зарегистрированных суммирующим счетчиком, к значению абсолютного измерения. На шаге 906 проверяют, не превышает ли разница между текущим результатом измерения и величиной, измеренной при предыдущей итерации, половины диапазона устройства. Если не превышает, то управление переходит обратно на шаг 902, в противном случае, на шаге 908 счетчику дается приращение, и затем управление вновь переходит на шаг 902.
Поскольку все шестерни поворачиваются одновременно, но каждая со своей скоростью, абсолютные положения в уменьшенном диапазоне могут быть определены по любой комбинации шестерен. Этим обеспечивается встроенное резервирование и (или) возможность проверки ошибок чтения. Описанная выше возможность использования суммирующих счетчиков позволяет увеличить скорость измерения, поскольку в каждый момент времени измеряется положение только одного звена.
Недостатком обычных механических систем поворота на определенный угол является то, что если имеется неисправность в одном из звеньев и она не скорректирована нужным образом, то ее практически невозможно обнаружить. В схеме с непрерывным движением, как, например, в вариантах выполнения настоящего изобретения, обнаружить неисправности относительно просто. Поскольку все передаточные соотношения перемещений известны, возможно в ходе нескольких выборок обнаружить неисправность в частях устройства. Две выборки на каждом вращающемся звене позволяют определить, насколько переместилось каждое звено, при условии, что эти выборки не разделены несколькими оборотами. Отсюда можно определить, насколько далеко должно было сдвинуться каждое звено, поскольку все передаточные отношения перемещения определены.
Для самопроверки устройства в уменьшенном диапазоне может быть использовано несколько подгрупп шестерен. При такой схеме построения, для подтверждения точности и проверки ошибок чтения в выбранном для измерения звене, могут быть использованы звенья/шестерни, положения которых последовательно измеряются. Кроме того, в такой схеме построения число оборотов, которое может зарегистрировать устройство, не ограничено. Эта способность использовать один измеряемый элемент с суммирующим счетчиком дает преимущество более высокой скорости измерений, поскольку каждый момент времени измеряется положение только одной шестерни. Устройство также может быть выполнено с дополнительной возможностью измерений с использованием всех вращающихся звеньев для подтверждения положения входного звена.
Устройство может быть выполнено с возможностью автоматического переключения в один из описанных выше "резервных режимов" работы, либо может дать возможность пользователю установить этот режим.
Путем повышения разрешающей способности выбранных первых звеньев (в данном примере, 104A, хотя выбранный измеряемый элемент не обязательно должен быть первой шестерней в зубчатом механизме), разрешающая способность устройства 100 может быть увеличена. Благодаря этому можно менять входное передаточное отношения до датчика для обеспечения желаемого баланса между конечным числом оборотов, которое должно быть измерено, и желаемой необходимой точностью. Диапазон работы устройства может быть увеличен путем изменения передаточного отношения первичной шестерни, ведущий в механизм устройства, за счет снижения разрешающей способности.
Устройство может продолжать вычислять положение за пределами своего абсолютного диапазона. В этой точке произойдет сброс в исходное положение, но в некоторых применениях это допустимо.
Настоящее изобретение относится к механизму для выдачи (получения) показаний многооборотного углового положения входного звена. Заявленный механизм (100) для выдачи показаний многооборотного углового положения входного звена (106) включает комплект вращающихся звеньев (104A-104D), выполненных с возможностью в процессе использования вращаться в соответствии с вращением входного звена (106); комплект измерительных датчиков (114А), выполненных с возможностью измерения и выдачи углового положения по меньшей мере одного из вращающихся звеньев; и устройство (114), выполненное с возможностью использования результатов измерения углового положения от комплекта измерительных датчиков для выдачи показаний многооборотного углового положения входного звена, причем вращающиеся звенья выполнены с возможностью вращения одновременно, но с разными скоростями, комплект вращающихся звеньев включает по меньшей мере четыре вращающихся звена, и комплект измерительных датчиков включает по меньшей мере четыре измерительных датчика, выполненных с возможностью измерения и выдачи углового положения соответствующего одного из по меньшей мере четырех вращающихся звеньев, каждое из вращающихся звеньев (104A-104D) имеет любое отличное передаточное отношение по скорости относительно других вращающихся звеньев, и от одного из комплекта вращающихся звеньев (104А) прямо приводятся во вращение все остальные вращающиеся звенья. Технический результат заключается в обеспечении большого рабочего диапазона, а также более высоких допусков на люфт в устройстве и более низких требований к точности, что дает возможность использовать менее прецизионные и дорогие компоненты, а также в обеспечении возможности функционирования устройства в резервном режиме при отказе какого-либо из датчиков. 2 н. и 20 з.п. ф-лы, 9 ил.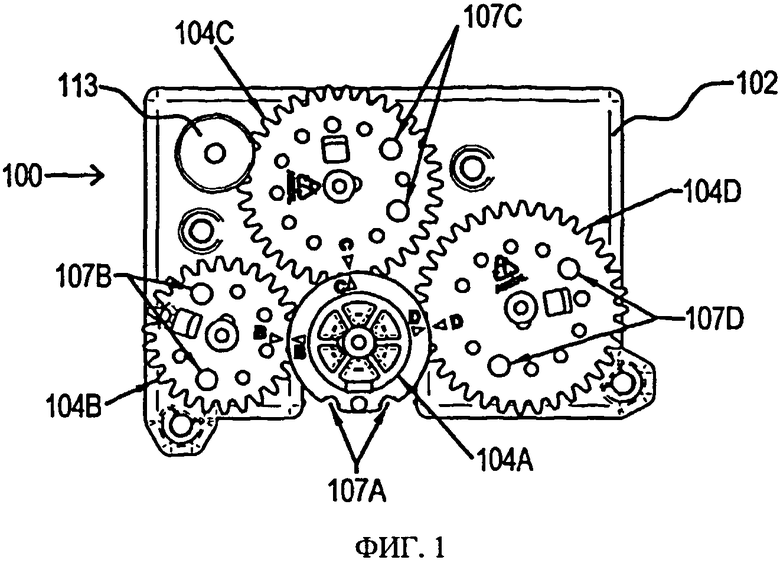
1. Механизм (100) для выдачи показаний многооборотного углового положения входного звена (106), включающий:
комплект вращающихся звеньев (104A-104D), выполненных с возможностью в процессе использования вращаться в соответствии с вращением входного звена (106);
комплект измерительных датчиков (114А), выполненных с возможностью измерения и выдачи углового положения по меньшей мере одного из вращающихся звеньев; и
устройство (114), выполненное с возможностью использования результатов измерения углового положения от комплекта измерительных датчиков для выдачи показаний многооборотного углового положения входного звена,
причем вращающиеся звенья выполнены с возможностью вращения одновременно, но с разными скоростями,
комплект вращающихся звеньев включает по меньшей мере четыре вращающихся звена, и комплект измерительных датчиков включает по меньшей мере четыре измерительных датчика, выполненных с возможностью измерения и выдачи углового положения соответствующего одного из по меньшей мере четырех вращающихся звеньев,
каждое из вращающихся звеньев (104A-104D) имеет любое отличное передаточное отношение по скорости относительно других вращающихся звеньев, и от одного из комплекта вращающихся звеньев (104А) прямо приводятся во вращение все остальные вращающиеся звенья.
2. Механизм по п. 1, в котором каждое из вращающихся звеньев (104А-104D) обладает передаточным отношением по скорости по отношению к другому(-им) вращающимся звеньям, при этом вращающиеся звенья выбраны так, чтобы передаточные отношения вращения не имели общего множителя (кроме единицы).
3. Механизм по п. 1, в котором вращающиеся звенья (104A-104D) имеют шестерни с различным/индивидуальным числом зубьев.
4. Механизм по п. 1, в котором, в процессе использования, вращающиеся звенья (104A-104D) двигаются вместе со входным звеном (106) непрерывно и бесступенчато.
5. Механизм по п. 1, в котором комплект измерительных датчиков (114А) способен выполнять измерение абсолютного положения одного из вращающихся звеньев (104A-104D) в пределах 360°.
6. Механизм по п. 5, в котором комплект измерительных датчиков (114А) использует оптические, магнитные или радиочастотные сенсорные датчики.
7. Механизм по п. 5, включающий вращающиеся звенья A-N (104A-104D), каждое из которых имеет соответствующее передаточное отношение от RA до RN, при этом точность упомянутого измерительного датчика (114А) характеризуется максимально-допустимой пиковой погрешностью, удовлетворяющей соотношению:
Максимальная погрешность =  .
.
8. Механизм по п. 1, в котором комплект вращающихся звеньев включает нескольких вращающихся звеньев (104A-104D), каждое из которых имеет условное нулевое положение, и устройство (114) выполнено с возможностью обеспечения выдачи показаний положения посредством вычисления того, насколько далеко вращающиеся звенья ушли от своих нулевых положений.
9. Механизм по п. 8, в котором выполняемые устройством (114) вычисления включают виртуальное скручивание назад вращающихся звеньев (104) до их соответствующих нулевых положений.
10. Механизм по п. 9, в котором устройство (114) выполнено с возможностью:
виртуального скручивания назад (402) первого по порядку из вращающихся звеньев (104А) до достижения его нулевого положения; затем
для каждого вращающегося звена (104B-104D), кроме первого по порядку вращающегося звена:
вычисления (406) виртуального положения вращающегося звена (104B-104D) на основе угла, на который повернулось предыдущее по порядку вращающееся звено (104А) при его виртуальном скручивании назад, и
виртуального скручивания назад (408) вращающегося звена (104В-104D) и всех предыдущих по порядку вращающихся звеньев (104А) так, чтобы они оказались в своих нулевых положениях.
11. Механизм по п. 10, в котором для вычисления (406) используются хранимые данные, например, из справочной таблицы, представляющие положение упомянутого вращающегося звена (104B-104D), когда предыдущее по порядку вращающееся звено(-я) (104А) находится(-ятся) в своем нулевом положении(-иях), и данные, представляющие, сколько раз все предыдущие по порядку вращающиеся звенья вместе прошли через свои нулевые положения, когда данное вращающееся звено попало в соответствующее положение.
12. Механизм по п. 1, в котором комплект вращающихся звеньев включает вращающиеся звенья (104A-104D), расположенные по копланарной схеме.
13. Механизм по п. 1, в котором комплект вращающихся звеньев включает вращающиеся звенья (104A-104D), расположенные по коаксиальной схеме.
14. Механизм по п. 1, питание на который не подается постоянно.
15. Механизм по п. 14, в котором комплект измерительных датчиков (114А) измеряет положения вращающихся звеньев (104), достигнутые в результате движения в отсутствие подаваемого на механизм питания.
16. Механизм по п. 14, имеющий коммутатор (113) для активизации комплекта измерительных датчиков (114А), когда вращающееся звено(-я) (104) сдвигается.
17. Механизм по п. 1, в котором комплект измерительных датчиков обеспечивает измерение положения одного вращающегося звена из комплекта вращающихся звеньев (104), так, что если в одном из измерительных датчиков в комплекте произойдет отказ, то вместо него будет использован другой измерительный датчик из комплекта.
18. Способ получения показаний многооборотного углового положения входного звена (106), при выполнении которого:
измеряют угловое положение комплекта вращающихся звеньев, вращающихся, в процессе работы, в соответствии с вращением входного звена (106), при этом вращающиеся звенья выполнены для вращения одновременно, но с разной скоростью, и
получают показания многооборотного углового положения входного звена с использованием измерений углового положения, полученных от комплекта вращающихся звеньев (110),
причем комплект вращающихся звеньев включает по меньшей мере четыре вращающихся звена, и комплект измерительных датчиков включает по меньшей мере четыре измерительных датчика, выполненных с возможностью измерения и выдачи углового положения соответствующего одного из по меньшей мере четырех вращающихся звеньев,
каждое из вращающихся звеньев (104A-104D) имеет любое отличное передаточное отношение по скорости относительно других вращающихся звеньев, и
от одного из комплекта вращающихся звеньев (104А) прямо приводятся во вращение все остальные вращающиеся звенья.
19. Способ по п. 18, в котором дополнительно:
выполняют измерения положения первого (104А) из вращающихся звеньев за некоторый промежуток времени;
выполняют измерения положения другого (104В) из вращающихся звеньев за этот промежуток времени;
сравнивают измеренное положение другого вращающегося звена с его ожидаемым положением, с учетом измеренных положений первого звена и известного соотношения между вращениями звеньев, и
если измеренное положение другого вращающегося звена не соответствует ожидаемому положению, выдают метку возможного состояния ошибки чтения.
20. Способ по п. 18, в котором дополнительно выполняют проверку на ошибки чтения путем обнаружения отсутствия углового вращения по меньшей мере одного из вращающихся звеньев (104).
21. Способ по п. 18, в котором дополнительно используют по меньшей мере один суммирующий счетчик (114С), связанный с по меньшей мере одним из вращающихся звеньев (104), и
используют выходные показания по меньшей мере одного суммирующего счетчика для вычисления положения входного звена на основании подсчета числа множества оборотов по меньшей мере одного связанного вращающегося звена.
22. Способ по п. 18, в котором при обнаружении неисправности одного или более вращающихся звеньев (104В):
измеряют угловое положение не отказавшего вращающегося звена(-ев) (104В, 104С, 104D), и
получают показания углового положения входного звена (106) в сокращенном многооборотном диапазоне, используя измерения углового положения не отказавшего вращающегося звена(-ов).
| Устройство для диатермоэксцизии | 1987 |
|
SU1477389A1 |
| US 20080307873 A1 18.12.2008 | |||
| Седиментометр | 1987 |
|
SU1408305A1 |

