ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение, в общем, относится к датчикам транспортного средства, а точнее, к калибровке датчиков транспортного средства с использованием присоединенных к беспроводной сети датчиков.
УРОВЕНЬ ТЕХНИКИ
Транспортное средство включает в себя датчики для измерения условий вокруг транспортного средства. Электронные блоки управления транспортного средства используют измерения для управления подсистемами транспортного средства. Например, измерения влажности с датчика влажности транспортного средства могут использоваться для внесения поправки в измерения расстояния, выполненные ультразвуковыми датчиками. Со временем, в относительно неблагоприятных условиях эксплуатации, в которых работают датчики транспортного средства, точность датчиков ухудшается. Это ухудшение оказывает влияние на управление транспортным средством.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Прилагаемая формула изобретения устанавливает объем этой заявки. Настоящее изобретение обобщает аспекты вариантов осуществления и не должно использоваться для ограничения формулы изобретения. Другие реализации предполагаются в соответствии с технологиями, описанными в материалах настоящей заявки, как будет очевидно специалисту в данной области техники по изучению нижеследующих чертежей и подробного описания, и подразумевается, что эти реализации должны подпадать под объем этой заявки.
Раскрыты примерные варианты осуществления для калибровки датчиков транспортного средства с использованием присоединенных к беспроводной сети датчиков. Примерное раскрытое транспортное средство включает в себя контроллер связи и диспетчер датчиков. Примерный контроллер связи с возможностью обмена информацией присоединяется к сети, связанной с сооружением. Примерный диспетчер датчиков определяет, когда транспортное средство находится поблизости от сооружения. Дополнительно, диспетчер датчиков калибрует датчики транспортного средства на основании измерительных данных датчиков, установленных на сооружении, которые с возможностью обмена информацией присоединены к сети.
Примерный способ для калибровки первых датчиков транспортного средства включает в себя, в ответ на нахождение транспортного средства поблизости от сооружения, с которым у него есть связь, присоединение к беспроводной локальной сети сооружения. Примерный способ также включает в себя запрашивание измерительных данных со вторых датчиков, установленных на сооружении. Вторые датчики с возможностью обмена информацией присоединены к беспроводной локальной сети сооружения. Дополнительно, способ включает в себя, на основании измерительных данных, калибровку первых датчиков.
Материальный машиночитаемый носитель, содержащий команды, которые, когда выполняются, предписывают транспортному средству, в ответ на нахождение транспортного средства поблизости от сооружения, с которым у него есть связь, присоединяться к беспроводной локальной сети сооружения. Команды также предписывают транспортному средству запрашивать измерительные данные со вторых датчиков, установленных на сооружении, вторые датчики являются присоединенными с возможностью обмена информацией к беспроводной локальной сети сооружения. Дополнительно, команда предписывает транспортному средству, на основании измерительных данных, перекалибровать первые датчики.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ради лучшего понимания изобретения, можно обратиться к вариантам осуществления, показанным на нижеследующих чертежах. Компоненты на чертежах не обязательно находятся в масштабе, и связанные элементы могут быть опущены или, в некоторых случаях, могли быть преувеличены пропорции, с тем чтобы подчеркнуть и ясно проиллюстрировать обладающие новизной признаки, описанные в материалах настоящей заявки. В дополнение, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. Кроме того, на чертежах, одинаковые ссылочные позиции обозначают соответствующие части на всем протяжении нескольких видов.
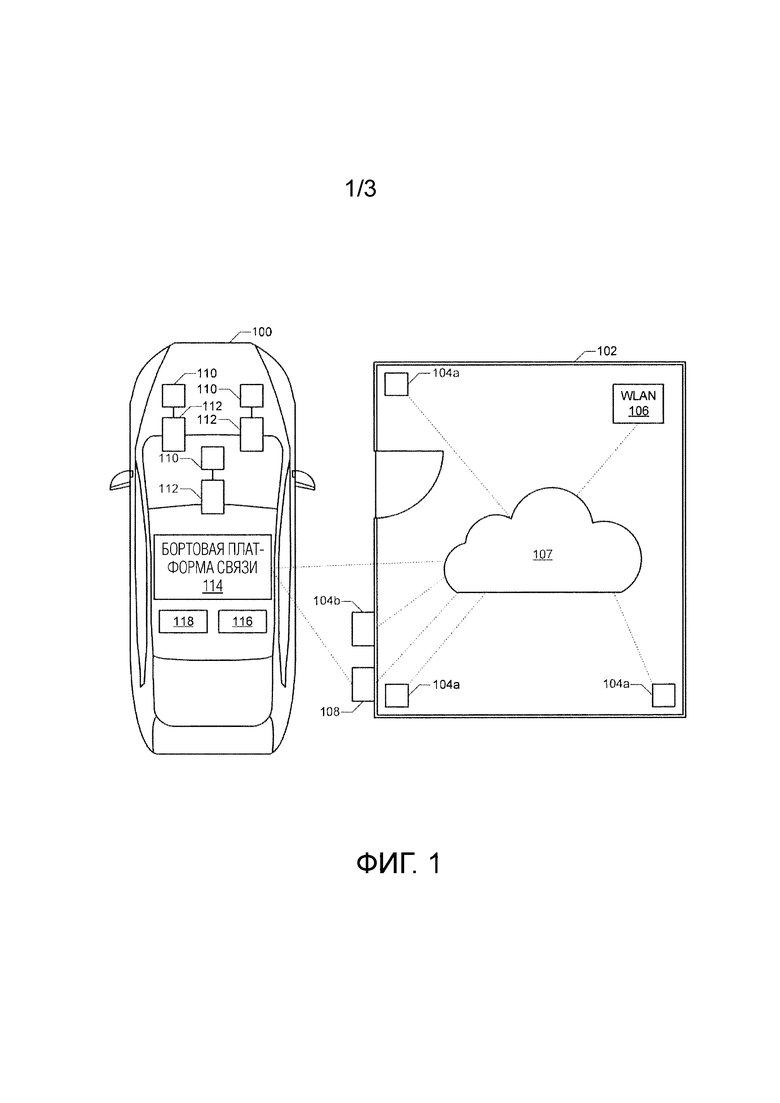
Фиг. 1 иллюстрирует транспортное средство, расположенное поблизости от сооружения с присоединенными к сети датчиками в соответствии с идеями данного раскрытия.
Фиг. 2 - структурная схема электронных компонентов транспортного средства по фиг. 1.
Фиг. 3 - блок-схема последовательности операций способа для калибровки датчиков транспортного средства по фиг. 1 с использованием присоединенных к сети датчиков сооружения, который может быть реализован электронными компонентами по фиг. 2.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Несмотря на то, что изобретение может быть воплощено в различных формах, на чертежах показаны и будут описаны в дальнейшем некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие должно считаться иллюстративным примером изобретения и не подразумевается, что должно ограничивать изобретение проиллюстрированными конкретными вариантами осуществления.
Все больше и больше бытовые устройства включают в себя датчики, которые присоединены к сети, чтобы предусматривать дистанционно доступную информацию и дистанционное управление устройствами. Зачастую, эти установленные на сооружении датчики дают более точную информацию, чем датчики на транспортных средствах, например, так как (a) они типично менее подвержены воздействию шумовых факторов, которые обнаруживаются на транспортных средствах, (b) они часто дороже стоят и более точны, и/или (c) они могут быть в меньшей степени предрасположены к ухудшению характеристик, так как они не подвергаются воздействию суровых условий, действие которых выдерживают транспортные средства. В качестве используемого в материалах настоящей заявки, термин «установленные на сооружении датчики» указывает ссылкой на датчики, (a) установленные на или вокруг капитального сооружения (например, дома, бензозаправочной станции, и т. д.) и/или (b) установленные на устройствах, расположенных в пределах или вокруг сооружения. Эти установленные на сооружении датчики присоединены к сети (например, локальной сети, сети Интернет, и т. д.) и выдают измерения через сеть.
Как раскрыто ниже, транспортное средство выявляет, когда оно находится поблизости от сооружения, с которым у транспортного средства есть связь. В качестве используемого в материалах настоящей заявки, транспортное средство имеет связь с сооружением, когда (a) транспортное средство было привязано (например, применительно к персональной сети) и/или наделено мандатом (например, применительно к беспроводной локальной сети) для доступа в сеть на сооружении, и (b) транспортное средство имеет доступ к измерениям датчиков с установленных на сооружении датчиков через сеть. Транспортное средство определяет, когда оно находится поблизости с таким сооружением, с использованием приемника глобальной системы определения местоположения (GPS), и/или находясь в пределах дальности действия для присоединения к сети. В некоторых примерах, транспортное средство выявляет, что оно находится поблизости от сооружения, с которым у него есть связь, а затем, приводит в активное состояние контроллер связи для установления соединения с сооружением.
Как только соединение установлено, транспортное средство принимает список датчиков на сооружении и связанную оценку точности датчиков. Транспортное средство сравнивает оценку точности датчиков, имеющихся в распоряжении на сооружении, с калибровками датчиков транспортного средства. Применительно к датчикам сооружения, которые (a) имеют большую оценку точности, чем датчики транспортного средства, (b) имеют большую оценку точности, чем предыдущие калибровки (например, с других сооружений, и т. д.), транспортное средство выполняет стратегию калибровки в отношении датчика транспортного средства. В некоторых примерах, стратегия калибровки, используемая для разных датчиков транспортного средства, различается на основании того, какой датчик калибруется. Например, категории калибровки могут включать в себя применение смещения или коэффициента усиления, простую подстановку значений, смещение передаточной функцией и/или калибровку развертки, и т. д. Дополнительно, транспортное средство хранит оценку точности датчика сооружения.
Фиг. 1 иллюстрирует транспортное средство 100, расположенное поблизости от сооружения 102 с присоединенными к сети датчиками 104a и 104b в соответствии с доктринами данного изобретения. Примерное сооружение 102 является любым пригодным местом с присоединенными к сети датчиками 104a и 104b, которые присоединены к сети, таким как дом, бензозаправочная станция, представительство по продаже автомобилей и/или крытая автостоянка, и т. д. В проиллюстрированном примере, сооружение 102 включает в себя присоединенные к сети датчики 104a и 104b, и сетевой контроллер 106 связи В некоторых примерах, сооружение 102 также включает в себя сетевой мост 108.
Присоединенные к сети датчики 104a и 104b измеряют окружающую среду вокруг сооружения 102. Присоединенные к сети датчики 104a и 104b включают в себя датчики влажности, датчики температуры, датчики давления, датчики качества воздуха, датчики рассеянного освещения и/или датчики дождя, и т. д. В некоторых примерах, присоединенные к сети датчики 104a являются отдельными датчиками (например, датчиками, которые не включены в другое устройство) и/или датчиками, которые включены в другое устройство, такое как бытовой прибор. Например, присоединенные к сети датчики 104a могут быть включены в метеостанцию. В некоторых примерах, присоединенные к сети датчики 104b включены в комплект датчиков, предназначенный для включения в состав датчиков (например, датчиков 110, приведенных ниже) транспортного средства 100. Например, комплект 104b датчиков может производиться для конкретного транспортного средства 100 и включаться в состав, когда транспортное средство 100 покупается. В проиллюстрированном примере, комплект 104b датчиков прикреплен к стене сооружения (например, стене гаража, в котором становится на стоянку транспортное средство 100). Когда запрашиваются, присоединенные к сети датчики 104a и 104b (или, в некоторых примерах, контроллер комплекта 104b датчиков) выдают измерительные данные. Измерительные данные включают в себя (i) показание датчика и (ii) оценку точности соответствующих присоединенных к сети датчиков 104a и 104b. Например, барометр присоединенной к сети метеостанции может иметь точность ±0,08 inHg (дюймов ртутного столба). Присоединенные к сети датчики 104a и 104b делятся измерительными данными по сети 107 через соединение с сетевым контроллером 106 связи.
Сетевой контроллер 106 связи содействует связи присоединенных к сети датчиков 104a и 104b с сетью. Сетевой контроллер 106 связи включает в себя аппаратные средства (например, процессоры, память, хранилище, антенну и т. д.) и программное обеспечение для управления беспроводными сетевыми интерфейсами. В некоторых примерах, сетевой контроллер 106 связи является контроллером беспроводной локальной сети (WLAN), который создает беспроводную локальную сеть (например, сеть 107), реализующую протокол WLAN (например, IEEE 802.11 a/b/g/n/ac, и т. д.). В некоторых примерах, присоединенные к сети датчики 104a и 104b выгружают показания датчиков на один или более внешних серверов (не показаны) через сетевой контроллер 106 связи. Сеть 107 может использовать многообразие сетевых протоколов, имеющихся в распоряжении в настоящее время или разработанных позже, в том числе, но не в качестве ограничения, основанные на TCP/IP сетевые протоколы.
Сетевой мост 108 с возможностью обмена информацией присоединен к сетевому контроллеру 106 связи. Сетевой мост 108 предусматривает интерфейс связи для транспортного средства 100, например, когда транспортное средство 100 не включает в себя сетевой контроллер для присоединения к сети 107 WLAN сетевого контроллера 106 связи. Примерный сетевой мост 108 включает в себя аппаратные средства (например, процессоры, память, запоминающее устройство, антенну, и т. д.) и программное обеспечение для управления беспроводными сетевыми интерфейсами, такими как Bluetooth® и Bluetooth® с малым энергопотреблением (BLE) (как предписано техническими условиями Bluetooth и последующими редакциями, поддерживаемыми специальной группой по проблематике Bluetooth), Z-Wave® (как предписано техническими условиями Z-Wave, поддерживаемыми альянсом Z-Wave ) и/или Zigbee® (IEEE 802.15.4). В примерах, в которых используется сетевой мост 108, транспортное средство 100 с возможностью обмена информацией присоединяется к сетевому мосту 108. Транспортное средство 100 затем принимает измерительные данные из присоединенных к сети датчиков 104a и 104b, присоединенных к сети 107 через сетевой мост 108.
Транспортное средство 100 может быть обычным транспортным средством с бензиновым силовым приводом, транспортным средством с гибридным приводом, транспортным средством с электрическим приводом, транспортным средством на топливных элементах и/или любым другим реализующим подвижность типом транспортного средства. Транспортное средство 100 включает в себя части, связанные с подвижностью, такие как силовая передача с двигателем, трансмиссия, подвеска, ведущий вал и/или колеса, и т. д. Транспортное средство 100 может быть неавтономным, полуавтономным (например, с некоторыми типовыми двигательными функциями, управляемыми транспортным средством 100) или автономным (например, двигательные функции управляются транспортным средством 100 без непосредственного водительского ввода). В проиллюстрированном примере, транспортное средство 100 включает в себя датчики 110, электронные блоки 112 управления (ECU), бортовую платформу 114 связи, приемник 116 глобальной системы определения местоположения (GSP) и диспетчер 118 датчиков.
Датчики 110 могут быть скомпонованы в и вокруг транспортного средства 100 любым пригодным образом. Датчики 110 могут быть установлены, чтобы измерять свойства вокруг наружной стороны транспортного средства 100. Дополнительно, некоторые датчики 110 могут быть установлены внутри кабины транспортного средства 100 или в кузове транспортного средства 100 (к примеру, моторном отсеке, нишах для колес, и т. д.) для измерения свойств во внутренней области транспортного средства 100. Например, такие датчики 110 могут включать в себя измерители ускорения, одометры, тахометры, датчики угла продольного наклона и угла рыскания, датчики скорости вращения колес, микрофоны, датчики давления в шинах и биометрические датчики, и т. д. В проиллюстрированном примере, датчики 110 электрически присоединены к ECU 112, чтобы выдавать показания датчиков в ECU 112. Со временем, калибровка датчиков 110 может ухудшаться по мере того, как датчики 110 подвергаются воздействию неблагоприятных условий окружающей среды (например, погоды, внутреннего тепла моторного отсека, и т. д.).
ECU 112 контролируют и управляют подсистемами транспортного средства 100. ECU 112 передает и обменивается информацией через шину данных транспортного средства (например, шину 204 данных транспортного средства по фиг. 2, приведенной ниже). Дополнительно, ECU 112 могут сообщать свойства (такие как состояние ECU 112, показания с датчиков, состояние устройства управления, коды ошибки и диагностические коды, и т. д.) в и/или принимать запросы из других ECU 112. Некоторые транспортные средства 100 могут иметь семьдесят или более ECU 112, расположенных в различных местах по транспортному средству 100, соединенных с возможностью обмена информацией посредством шины 204 данных транспортного средства. ECU 112 являются дискретными наборами электроники, которые включают в себя свою собственную схему(ы) (такую как интегральные схемы, микропроцессоры, память, запоминающее устройство, и т. д.) и встроенные программы, датчики, исполнительные механизмы и/или монтажную арматуру. ECU 112 используют показания датчиков из датчиков 110 транспортного средства 100 для управления подсистемами транспортного средства 100. Например, усовершенствованная система содействия водителю (ADAS) может использовать показания датчиков для коррекции расчетов расстояния на основании показаний датчиков из датчика влажности и датчика температуры, а блок управления силовой передачей может управлять противобуксовочной системой на основании показаний датчика с датчика дождя. Дополнительно, ECU 112 поддерживает калибровочный профиль для датчиков 110, который корректирует показания с датчиков 110. Изначально, калибровочный профиль может представляться во время производственного процесса. Как обсуждено ниже, калибровочный профиль обновляется время от времени диспетчером 118 датчиков. Примерные ECU 112 включают в себя ADAS, блок управления силовой передачей, блок автономности (например, ECU 112, который управляет двигательными функциями транспортного средства 100, когда транспортное средство 100 является автономным), телематический блок.
Бортовая платформа 114 связи включает в себя проводной или беспроводный сетевые интерфейсы, чтобы давать возможность связи с внешними сетями. Бортовая платформа 114 связи также включает в себя аппаратные средства (например, процессоры, память, хранилище, антенну, и т. д.) и программное обеспечение для управления проводными и беспроводными сетевыми интерфейсами. Бортовая платформа 114 связи включает в себя один или более контроллеров беспроводной связи для глобальных сетей (например, Глобальной системы мобильной связи (GSM), Универсальной системы мобильной связи (UMTS), долгосрочного развития (LTE), множественного доступа с кодовым разделением каналов (CDMA), WiMAX (IEEE 802.16m), и т. д.), беспроводных локальных сетей (например, IEEE 802.11 a/b/g/n/ac или других, специализированной связи ближнего действия (DSRC), и т. д.) и/или персональных сетей (например, Bluethooth®, Bluetooth® с малым энергопотреблением, Z-Wave®, Zigbee®, и т. д). Бортовая платформа 114 связи присоединяется к сети 107, предусмотренной сетевым контроллером 106 связи или сетевым мостом 108 сооружения 102, чтобы принимать измерительные данные из присоединенных к сети датчиков 104a и 104b сооружения 102. В некоторых примерах, бортовая платформа 114 связи присоединяется к серверу во внешней сети (например, сети Интернет) через модем сотовой связи. В таких примерах, присоединенные к сети датчики 104a и 104b сооружения 102 выгружают измерительные данные на сервер, чтобы извлекались через бортовую платформу 114 связи.
Диспетчер 118 датчиков формирует калибровочные профили для ECU 112 на основании измерительных данных из присоединенных к сети датчиков 104a и 104b, когда транспортное средство 100 находится в пределах порогового расстояния (например, десяти футов, двадцати футов, тридцати футов, и т. д.) (иногда указываемого ссылкой как «близость»). Даже в примерах, где диспетчер 118 датчиков поддерживает связь с внешним сервером по сети Интернет для приема измерительных данных из присоединенных к сети датчиков 104a и 104b, диспетчер 118 датчиков определяет, следует ли перекалибровать датчики 110, когда транспортное средство 100 находится поблизости от сооружения, так что датчики 110 измеряют по существу то же самое явление (например, то же самое давление, то же самое рассеянное освещение, ту же самую температуру, и т. д.), что и присоединенные к сети датчики 104a и 104b. Диспетчер 118 датчиков определяет, когда транспортное средство 100 находится поблизости от сооружения 102, на основании координат сооружения (например, хранимых в памяти) и координат транспортного средства 100, предоставленных приемником 116 GPS. В некоторых примерах, когда транспортное средство 100 не включает в себя приемник GPS, диспетчер 118 датчиков определяет, что транспортное средство 100 находится поблизости от сооружения 102, когда транспортное средство 100 находится в пределах дальности действия сети 107, предусмотренной сетевым контроллером 106 связи и/или сетевым мостом 108. В некоторых примерах, диспетчер 118 датчиков определяет координаты сооружения 102, когда диспетчер 118 датчиков приобретает связь с сооружением 102.
Когда транспортное средство 100 находится поблизости от сооружения 102, диспетчер 118 датчиков устанавливает соединение с сетью 107 сооружения 102. Диспетчер 118 датчиков запрашивает список присоединенных к сети датчиков 104a и 104b, присоединенных к сети 107, и соответствующие измерительные данные (например, показания датчика и оценку точности). В некоторых примерах, диспетчер 118 датчиков запрашивает список и соответствующие измерительные данные из сооружения 102 всякий раз, когда транспортное средство 100 находится поблизости, так как (a) сооружение 102 может добавлять присоединенные к сети датчики 104a и 104b время от времени, и (b) датчики 110 транспортного средства могут продолжать ухудшать характеристики.
Диспетчер 118 датчиков, что касается датчиков 110 транспортного средства 100 (например, с помощью калибровочных профилей датчиков 110) должен определять оценку точности датчика 110, текущее показание датчика и/или самую последнюю дату калибровки датчика 110. На основании калибровочных профилей датчиков 110 и измерительных данных из присоединенных к сети датчиков 104a и 104b, диспетчер 118 датчиков определяет, следует ли перекалибровать один или более из датчиков 110. Например, оценка точности соответствующего присоединенного к сети датчика 104a и 104b может быть большей, чем оценка точности присоединенного к сети датчика 104a и 104b, использованная для предыдущей калибровки датчика 110. В качестве еще одного примера, сравнение показания с датчика 110 и измерительных данных из соответствующего присоединенного к сети датчика 104a и 104b может указывать, что точность датчика 110 дополнительно ухудшилась со времени последней калибровки. Например, если датчик 110 транспортного средства 100 является датчиком влажности с точностью ±4,0 процента относительной влажности, а один из присоединенных к сети датчиков 104a и 104b является датчиком влажности с точностью ±2,0 процентов относительной влажности, то диспетчер 118 датчиков может формировать калибровочный профиль для датчика 110.
Если датчик(и) 110 должен быть перекалиброван, диспетчер 118 датчиков формирует калибровочный профиль(и) для датчика(ов) 110. Диспетчер 118 датчиков калибрует датчики 110 с использованием стратегии калибровки. Стратегия калибровки основана на конкретном датчике 110, который калибруется. Категории калибровки включают в себя применение смещения или коэффициента усиления, простую подстановку значений, смещение передаточной функцией и/или калибровку развертки, и т. д. Например, если датчик 110 транспортного средства 100 является датчиком влажности, который измеряет 71 процент относительной влажности, а один из присоединенных к сети датчиков 104a и 104b является датчиком влажности, который измеряет 68 процентов относительной влажности, диспетчер 118 датчиков может формировать калибровочный профиль датчика, указывающий, что (a) стратегией калибровки является смещение, (b) оценка точности присоединенного к сети датчика 104a и 104b имеет значение ±2,0 процента относительной влажности, и (c) смещение имеет значение 3% относительной влажности. Диспетчер 118 датчиков передает калибровочные профили в соответствующие ECU 112 (например, ECU 112, которые используют показания датчиков из конкретного датчика 110).
Когда транспортное средство 100 в исходном положении находится поблизости от сооружения 102, диспетчер 118 датчиков создает связь с сетью 107 сооружения 102 через бортовую платформу 114 связи. Когда побуждается пользователем (например, через устройство отображения центральной консоли (не показано)), диспетчер 118 датчиков обнаруживает сеть 107 (например, выявляя сеть 107 или выявляя сетевой мост 108). Бортовая платформа 114 связи связывается с сетевым контроллером 106 связи, например, посредством выдачи мандата (например, пароля, и т. д.). После связывания, диспетчер 118 датчиков впоследствии присоединяется к сети 107, когда сеть 107 находится в пределах дальности действия.
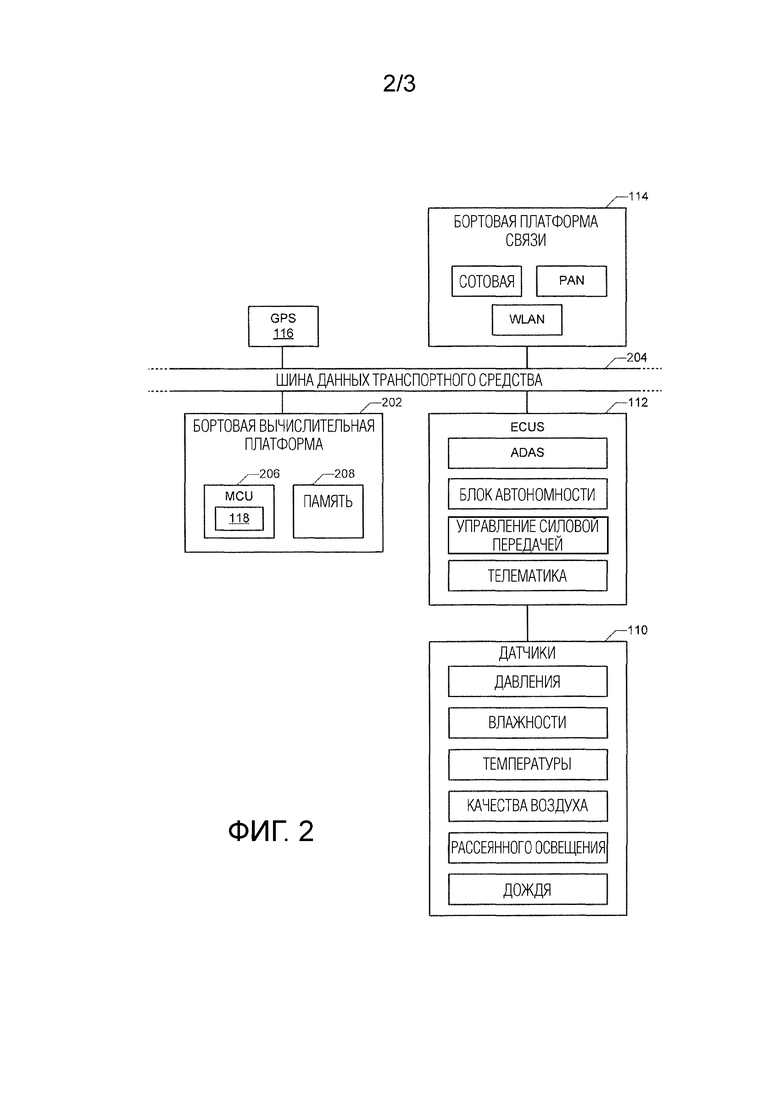
Фиг. 2 - структурная схема электронных компонентов 200 транспортного средства 100 по фиг. 1. Электронные компоненты 200 включают в себя датчики 110, ECU 112, бортовую платформу 114 связи, приемник 116 GPS, бортовую вычислительную платформу 202 и шину 204 данных транспортного средства.
Бортовая вычислительная платформа 202 включает в себя процессор или контроллер 206 и память 208. В некоторых примерах, бортовая вычислительная платформа 202 сконструирована, чтобы включать в себя диспетчер 118 датчиков. В качестве альтернативы, в некоторых примерах, диспетчер 118 датчиков включен в другой ECU 112 (например, ADAS, телематический блок, и т. д.) со своими собственными процессором и памятью. Процессор или контроллер 206 может быть любым пригодным устройством обработки или набором устройств обработки, таких как, но не в качестве ограничения: микропроцессор, основанная на микроконтроллерах платформа, пригодная интегральная схема, одна или более программируемых пользователем вентильных матриц (FPGA) и/или одна или более специализированных интегральных схем (ASIC). Памятью 208 может быть энергозависимая память (например, ОЗУ (оперативное запоминающее устройство, RAM), которое может включать в себя энергонезависимое ОЗУ, магнитное ОЗУ, ферроэлектрическое ОЗУ и любые другие пригодные формы); энергонезависимая память (например, дисковая память, флэш-память (FLASH), СППЗУ (стираемые программируемые постоянные запоминающие устройства, EPROM) ЭСППЗУ (электрически стираемые программируемые постоянные запоминающие устройства, EEPROM), основанная на мемристорах энергонезависимая твердотельная память, и т. д.); немодифицируемая память (например, СППЗУ), постоянное запоминающее устройство, и/или запоминающие устройства большой емкости (например, накопители на жестком диске, твердотельные накопители, и т. д.) В некоторых примерах, память 208 включает в себя многочисленные разновидности памяти, в частности, энергозависимую память и энергонезависимую память.
Память 208 является машиночитаемыми носителями, на которых могут быть воплощены один или более наборов команд, таких как программное обеспечение для приведения в действие способов по настоящему изобретению. Команды 926 могут воплощать один или более способов или логику, как описанные в материалах настоящей заявки. В конкретном варианте осуществления, команды могут находиться полностью или по меньшей мере частично в пределах любых одной или более из памяти 208, машиночитаемого носителя и/или в пределах процессора 206 во время выполнения команд.
Термины «постоянный машиночитаемый носитель» и «машиночитаемый носитель» включают в себя одиночный носитель или множество носителей, таких как централизованная или распределенная база данных и/или связанные устройства кэш-памяти и серверы, которые хранят один или более наборов команд. Термины «постоянный машиночитаемый носитель» и «машиночитаемый носитель» также включают в себя любой материальный носитель, который способен хранить, кодировать или переносить набор команд для выполнения процессором, или который побуждает систему выполнять любой один или более из способов или операций, раскрытых в материалах настоящей заявки. В качестве используемого в материалах настоящей заявки, термин «машиночитаемый носитель» ясно определен включающим в себя любой тип машиночитаемого запоминающего устройства и/или запоминающего диска для исключения распространяющихся сигналов.
Шина 204 данных транспортного средства с возможностью обмена информацией соединяет ECU 112, бортовую платформу 114 связи, приемник 116 GPS и/или бортовую вычислительную платформу 202, и т. д. В некоторых примерах, шина 204 данных транспортного средства включает в себя одну или более шин данных. Шина 204 данных транспортного средства может быть реализована в соответствии с протоколом шины локальной сети контроллеров (CAN), как определено стандартом 11898-1 Международной организации по стандартизации (ISO), протоколом шины транспортировки данных мультимедийных систем (MOST), протоколом шины многофункциональных данных CAN (CAN-FD) (ISO 11898-7) и протоколом шины К-line (ISO 9141 и ISO 14230-1), и/или протоколом шины Ethernet™ IEEE 802.3 (начиная с 2002 года), и т. д.
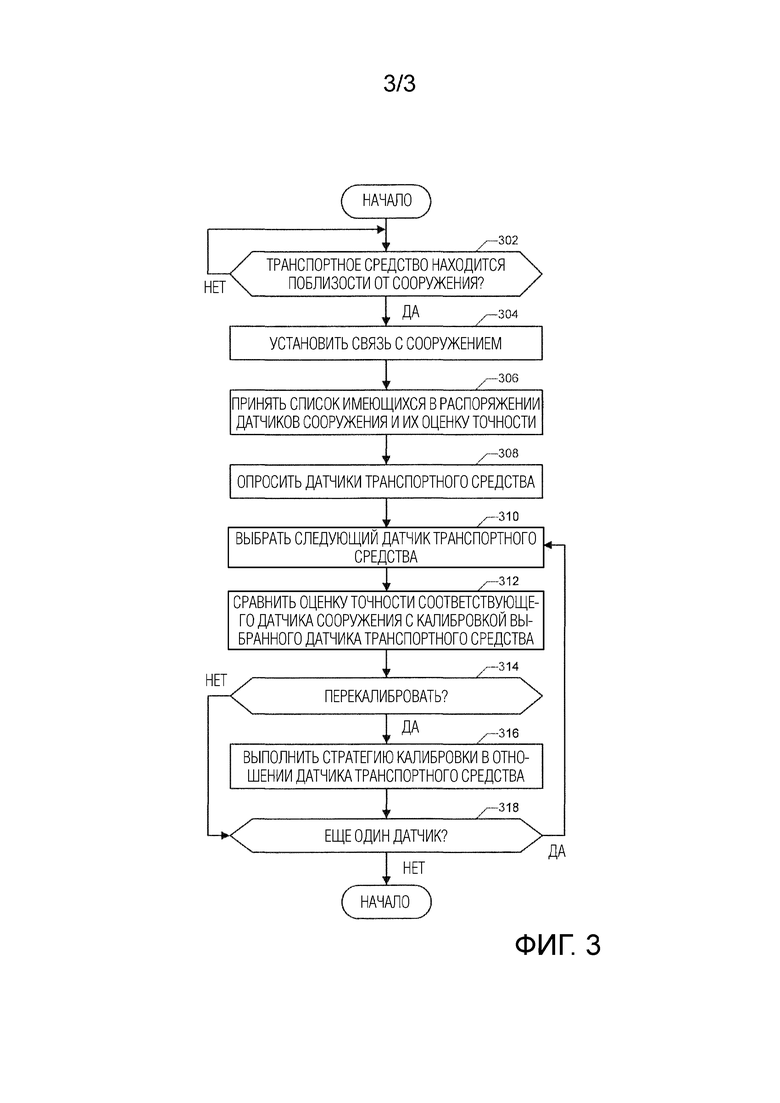
Фиг. 3 - блок-схема последовательности операций способа для калибровки датчиков 110 транспортного средства 100 по фиг. 1 с использованием присоединенных к сети датчиков 104a и 104b сооружения, который может быть реализован электронными компонентами 200 по фиг. 2. В начале, в блоке 302, диспетчер 118 датчиков ожидает до тех пор, пока транспортное средство 100 не находится поблизости от сооружения 102. Диспетчер 118 датчиков использует координаты из приемника 116 GPS и/или контролирует наличие в распоряжении сети(ей), связанной с сооружением 102, чтобы определять, когда транспортное средство 100 находится поблизости от сооружения 102. В блоке 304 диспетчер 118 датчиков устанавливает связь с сооружением 102 через сеть 107. В некоторых примерах, диспетчер 118 датчиков соединяется с сетевым мостом 108 с помощью протокола персональной сети.
В блоке 306 диспетчер 118 датчиков принимает список присоединенных к сети датчиков 104a и 104b, которые присоединены к сети 107. В некоторых примерах, список также включает в себя измерительные данные (например, показание(я) датчиков и оценку точности) из присоединенных к сети датчиков 104a и 104b. В блоке 308 диспетчер 118 датчиков опрашивает датчики 110 транспортного средства 100. Датчики 110 и/или связанные ECU 112 дают текущую оценку точности датчика 110 и показание датчика с датчика 110.
В блоке 310 диспетчер 118 датчиков выбирает следующий один из датчиков 110 для анализа. В блоке 312 диспетчер 118 датчиков сравнивает оценку точности соответствующего присоединенного к сети датчика 104a и 104b с оценкой точности датчика 110, выбранного в блоке 310. В некоторых примерах диспетчер 118 датчиков также сравнивает показания датчиков соответствующего присоединенного к сети датчика 104a и выбранного датчика 110. В некоторых таких примерах, диспетчер 118 датчиков запрашивает несколько показаний датчиков с выбранного датчика 110 и соответствующего присоединенного к сети датчика 104a и 104b, и рассматривает средние значения показаний датчиков за период времени. В блоке 314 диспетчер 118 датчиков определяет, следует ли перекалибровать выбранный датчик 110. Диспетчер 118 датчиков определяет, что следует перекалибровать выбранные датчики 110, когда (a) соответствующий присоединенный к сети датчик 104a и 104b более точен, чем датчик 110, и/или (b) показания датчиков (или усредненные показания датчиков) отличаются на пороговое значение (например, пороговое значение является оценкой ошибки присоединенного к сети датчика 104a и 104b). Например, если (i) датчик 110 транспортного средства 100 является датчиком влажности с точностью ±4,0 процента относительной влажности, (ii) соответствующий присоединенный к сети датчик 104a и 104b имеет точность ±2,0 процента относительной влажности, и (iii) усредненная разность между показаниями датчиков имеет значение 2,6 процента относительной влажности, диспетчер 118 датчиков может перекалибровать выбранный датчик 110. В блоке 316 диспетчер 118 датчиков выполняет стратегию калибровки в отношении выбранного датчика 110 на основании точности и показания(ий) датчика соответствующего присоединенного к сети датчика 104a и 104b. В блоке 318 диспетчер 118 датчиков определяет, есть ли еще один датчик 110 для анализа. Если есть еще один датчик 110, способ возвращается к блоку 310. Иначе, если еще одного датчика 110 нет, способ заканчивается.
Блок-схема последовательности операций способа по фиг. 3 является представляющей машиночитаемые команды, хранимые в памяти (такой как память 208 по фиг. 2), которые содержат одну или более программ, которые, когда приводятся в исполнение процессором (таким как процессор 206 по фиг. 2), побуждают транспортное средство 100 реализовывать примерный диспетчер 118 датчиков по фиг. 1 и 2. Кроме того, хотя примерная программа(ы) описана со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 3, многие другие способы реализации примерного диспетчера 118 датчиков могут использоваться в качестве альтернативы. Например, порядок приведения в исполнение блоков может быть изменен, и/или некоторые из описанных блоков могут быть изменены, исключены или объединены.
В этой заявке подразумевается, что использование разделительных союзов должно включать в себя соединительные союзы. Использование формы единственного числа не подразумевается указывающим количество элементов множества. В частности, подразумевается, что ссылка на объект также должна обозначать один из возможного множества таких объектов. Кроме того, союз «или» может использоваться для выражения признаков, которые присутствуют одновременно, вместо взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать включающим в себя «и/или». Термины «включает в себя», «включающий в себя» и «включают в себя» являются инклюзивными и имеют тот же самый объем, что и «содержит», «содержащий» и «содержат», соответственно.
Описанные выше варианты осуществления и, в частности, любые «предпочтительные» варианты осуществления, являются возможными примерами реализаций и изложены всего лишь для ясного понимания принципов изобретения. Многие варианты и модификации могут быть произведены в отношении описанных выше вариантов(а) осуществления, по существу не отходя от сущности и принципов технологий, описанных в материалах настоящей заявки. Все модификации подразумеваются включенными в материалы настоящей заявки в объеме данного изобретения и защищенными нижеследующей формулой изобретения.
Группа изобретений относится к способу для калибровки датчиков транспортного средства с использованием присоединенных к беспроводной сети датчиков, транспортному средству и материальному машиночитаемому носителю. Транспортное средство, осуществляющее способ, включает в себя контроллер связи и диспетчер датчиков. Контроллер связи с возможностью обмена информацией присоединяется к сети, связанной с сооружением. Диспетчер датчиков определяет, когда транспортное средство находится поблизости от сооружения. Дополнительно, диспетчер датчиков калибрует датчики транспортного средства на основании измерительных данных датчиков, установленных на сооружении, которые с возможностью обмена информацией присоединены к сети. Обеспечивается улучшение работы датчиков транспортного средства для управления транспортным средством. 3 н. и 12 з.п. ф-лы, 3 ил.
1. Транспортное средство, содержащее:
первые датчики; и
процессоры для:
присоединения, с возможностью обмена информацией, к сети, связанной с сооружением, при нахождении транспортного средства поблизости от сооружения, включающего в себя вторые датчики, установленные в сооружении;
калибровки первых датчиков на основании измерительных данных от вторых датчиков; и
приема от сооружения списка датчиков, имеющихся в сооружении для сравнения с по меньшей мере одним из первых датчиков.
2. Транспортное средство по п. 1, в котором измерительные данные включают в себя показание одного из вторых датчиков и оценку первой точности одного из вторых датчиков.
3. Транспортное средство по п. 2, в котором диспетчер датчиков должен калибровать один из первых датчиков, когда оценка первой точности больше, чем оценка второй точности одного из первых датчиков.
4. Транспортное средство по п. 2, в котором процессоры должны калибровать один из первых датчиков, когда расхождение показаний датчиков между одним из первых датчиков и одним из вторых датчиков больше, чем оценка первой точности одного из вторых датчиков.
5. Транспортное средство по п. 1, в котором для калибровки первых датчиков процессоры должны выполнять одну из множества стратегий калибровки на основании конкретных датчиков из первых датчиков, подлежащих калибровке.
6. Транспортное средство по п. 5, в котором множество стратегий калибровки, имеющихся в распоряжении у процессоров, включает в себя смещение наложения, применение коэффициента усиления, подстановку значений, смещение передаточной функцией и калибровку развертки.
7. Транспортное средство по п. 1, в котором вторые датчики установлены совместно в комплекте датчиков, который предназначен для транспортного средства.
8. Способ для калибровки первых датчиков транспортного средства, содержащий этапы, на которых:
при нахождении транспортного средства поблизости от сооружения, включающего в себя вторые датчики, установленные в сооружении, присоединяют, посредством процессоров, с возможностью обмена информацией, к беспроводной локальной сети, связанной с сооружением;
запрашивают, посредством процессоров, измерительные данные от вторых датчиков;
на основании измерительных данных, калибруют, посредством процессоров, первые датчики; и
принимают от сооружения список датчиков, имеющихся в сооружении, для сравнения с по меньшей мере одним из первых датчиков.
9. Способ по п. 8, в котором измерительные данные включают в себя показание одного из вторых датчиков и оценку первой точности одного из вторых датчиков.
10. Способ по п. 9, включающий в себя этап, на котором решают калибровать один из первых датчиков, когда оценка первой точности больше, чем оценка второй точности одного из первых датчиков.
11. Способ по п. 9, включающий в себя этап, на котором решают калибровать один из первых датчиков, когда расхождение показаний датчиков между одним из первых датчиков и одним из вторых датчиков больше, чем оценка первой точности одного из вторых датчиков.
12. Способ по п. 8, в котором калибровка первых датчиков включает в себя этап, на котором выполняют одну из множества стратегий калибровки на основании конкретных датчиков из первых датчиков транспортного средства, подлежащих калибровке.
13. Способ по п. 12, в котором множество стратегий калибровки включает в себя смещение наложения, применение коэффициента усиления, подстановку значений, смещение передаточной функцией и калибровку развертки.
14. Способ по п. 8, в котором вторые датчики установлены совместно в комплекте датчиков, который предназначен для транспортного средства.
15. Материальный машиночитаемый носитель, содержащий команды, которые, когда исполняются процессорами, предписывают транспортному средству, включающему в себя первые датчики:
при нахождении транспортного средства поблизости от сооружения, включающего в себя вторые датчики, установленные в сооружении, присоединять к беспроводной локальной сети сооружения;
запрашивать измерительные данные от вторых датчиков;
калибровать первые датчики на основании измерительных данных; и
принимать, от сооружения, список датчиков, имеющихся в сооружении, для сравнения с по меньшей мере одним из первых датчиков.
| СПОСОБ КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ | 2010 |
|
RU2527140C2 |
| КОММУНИКАЦИОННОЕ УСТРОЙСТВО ДЛЯ АВТОМОБИЛЯ ДЛЯ БЕСПРОВОДНОЙ ПЕРЕДАЧИ РЕЛЕВАНТНЫХ ДЛЯ АВТОМОБИЛЯ ДАННЫХ НА ДРУГОЙ АВТОМОБИЛЬ ИЛИ ИНФРАСТРУКТУРУ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И АВТОМОБИЛЬ, ВКЛЮЧАЮЩИЕ УКАЗАННОЕ КОММУНИКАЦИОННОЕ УСТРОЙСТВО И СПОСОБ ПЕРЕДАЧИ РЕЛЕВАНТНЫХ ДЛЯ АВТОМОБИЛЯ ДАННЫХ НА ДРУГОЙ АВТОМОБИЛЬ ИЛИ ИНФРАСТРУКТУРУ | 2008 |
|
RU2511526C9 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 8548671 B2, 01.10.2013. | |||

