(54.) ДАТЧИК ПОЛОХЕНИЯ И СКОРОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения | 1979 |
|
SU859797A1 |
| Датчик положения | 1980 |
|
SU976479A1 |
| Вентильный электродвигатель | 1990 |
|
SU1791924A1 |
| Преобразователь линейных ускорений | 1990 |
|
SU1774268A1 |
| Бесконтактный датчик расстояния до объекта из ферромагнитного материала | 1988 |
|
SU1580153A1 |
| Трансформаторный датчик угловых перемещений | 1981 |
|
SU974110A1 |
| МАГНИТОИНДУКЦИОННЫЙ ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 1994 |
|
RU2122742C1 |
| Магнитная головка | 1978 |
|
SU771713A1 |
| Датчик контроля разделения объектов | 1988 |
|
SU1610517A1 |
| Устройство для контроля качества короткозамкнутой обмотки ротора | 1988 |
|
SU1499281A1 |
Изобретениеотносится к технике автоматического контроля и регулирования и может быть использовано для одновременного измерения углового положения и скорости вращения различного рода валов и механизмов.
Известно, что для измерения скоростей вращения используются индукционные и магнитоиндукционные датчики скорости 1 и 2.
Наиболее близким к изобретению по технической сущности является датчик положения, содержащий магнитопровод, магнитострикционный элемент, включенный в магнитопроёод, пьезоэлектрический чувствительный элемент, источники МДС, ферромагнитный коммутатор. Наводимый на обкладках пьезоэлектрических элементов датчика .электрический сигнал практически не зависит от скорости перемещения ферромагнитного коммутатора, что обуславливает .целесообразность его применения в качестве датчика положения З.
В некоторых случаях целесообразно иметь один датчик, дающий инфррмадню о положении и скорости перемещения движущегося объекта, например, в цифровых системах зажигания двига телей внутреннего сгорания. Однако
ни одна из описанных систем датчиков не может обеспечить выполнение этой задачи.
Целью изобретения является расширение функциональных возможностей датчика путем получения информации о скорости.
Поставленная цель достигается тем, что полюсные наконечники маг10нитопровода снабжены обмотками, включенными последовательно согласно, в которьис наводится сигнал, характе-. ризующий скорость перемещения управляющего элемента ферромагнитного
15 коммутатора.
Модулированный коммутатором магнитный поток вызывает изменение размеров магнитострикциоиного элемента магнитопровода, деформацию пьезоэле20ментов, на обкладках которых при этом генерируются электрические заряде. Полученный таким образом электрический сигнсш не зависит от скорости перемещения управляющего элемента
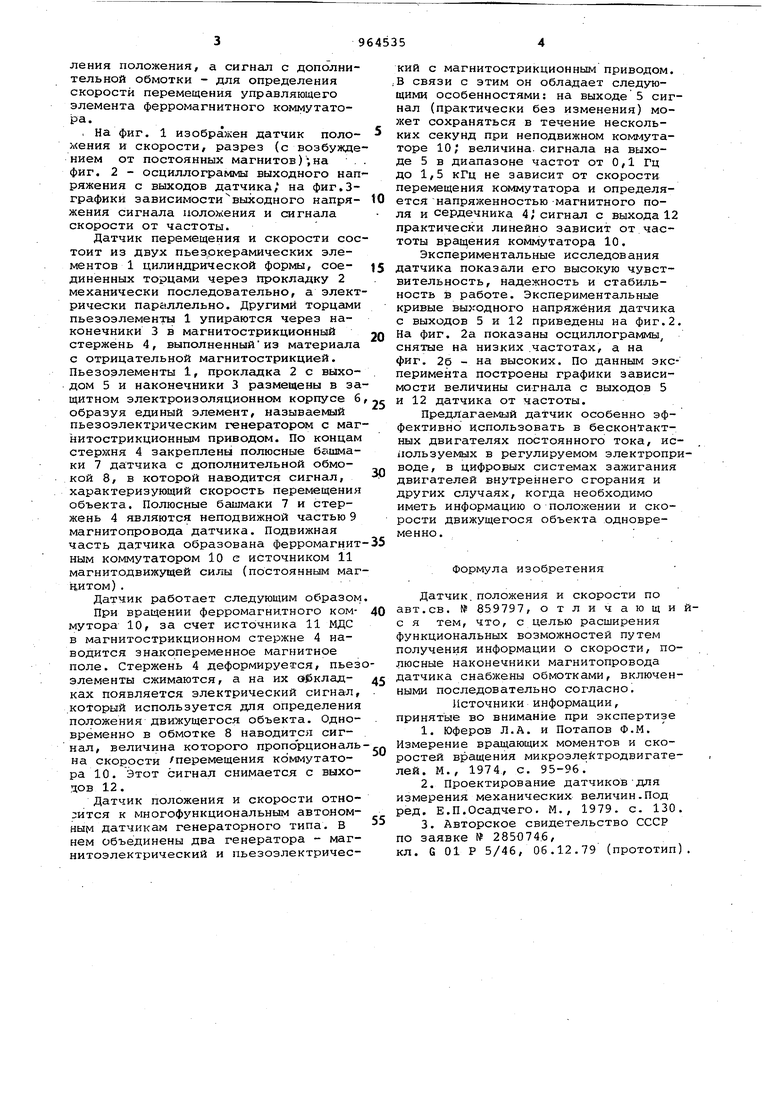
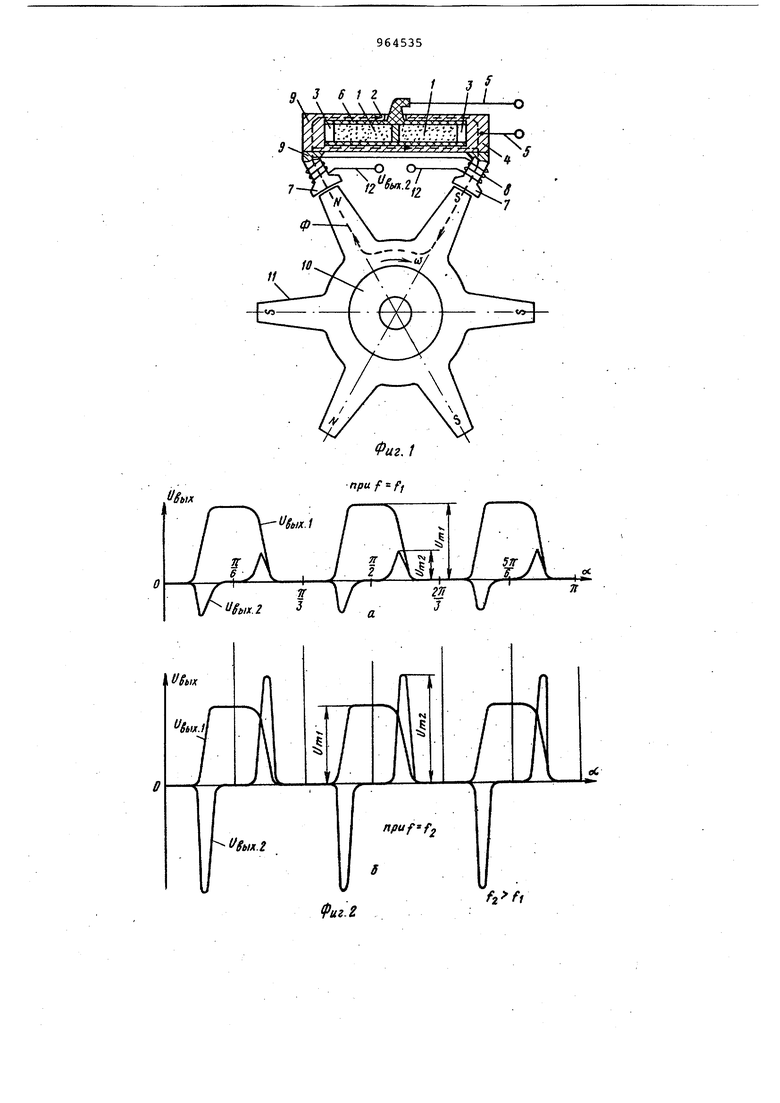
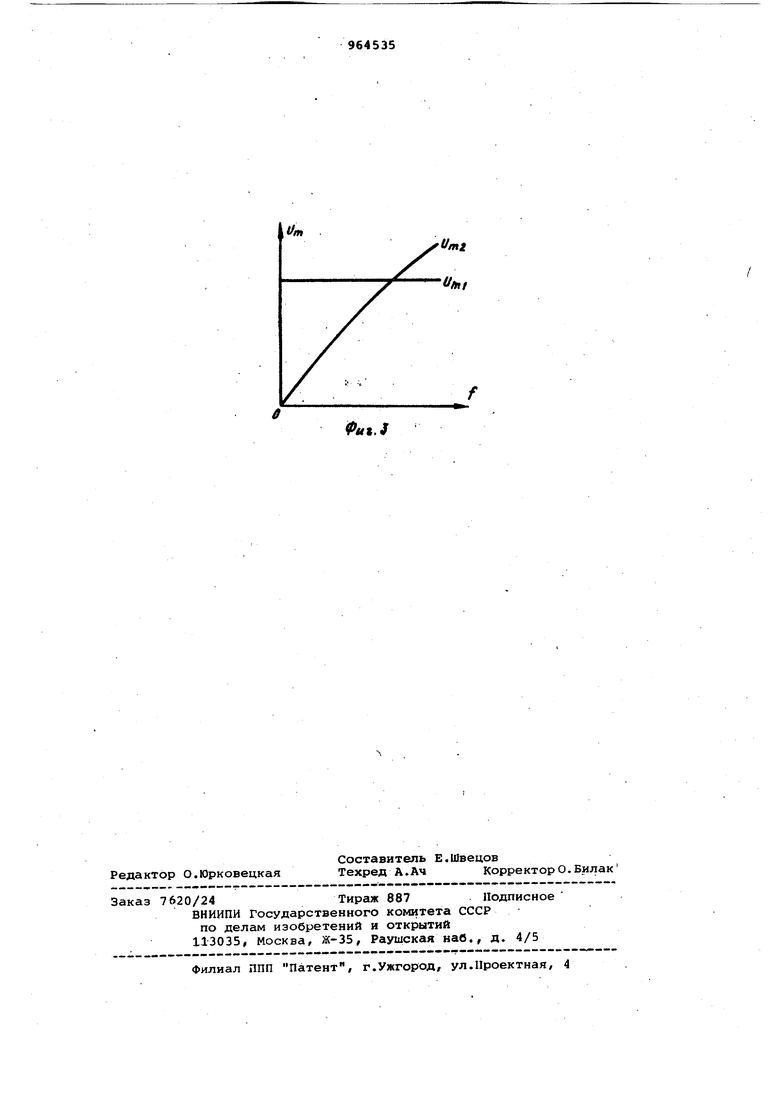
25 коммутатора. Одновременно в дополнительной обмотке наводится сигнал, величина которого пропорционгшьна скорости перемещения комг/ утатора. Сигнал с пьезоэлементов можно непос30 редствеино использовать для определения положения, а сигнал с дополнительной обмотки - для определения скорости перемещения управляющего элемента ферромагнитного коммутато. На фиг. 1 изображен датчик положения и скорости, разрез (с возбужде нием от постоянных магнитов) ,на . фиг. 2 - осциллограммы выходного нап ряжения с выходов датчика; на фиг.Зграфики зависимости выходного напряжения сигнала положения и сигнала скорости от частоты. Датчик перемещения и скорости сос тоит из двух пьезркерамических элементов 1 цилиндрической формы, соединенных торцами через прокладку 2 механически последовательно, а элект рически паргшлельно. Другими торцами пьезоэлементы 1 упираются через наконечники 3 в магнитострикционный стержень 4, выполненныйиз материала с отрицательной магнитострикцией. Пьезоэлементы 1, прокладка 2 с выходом 5 и наконечники 3 размещены в за щитном электроизоляционном корпусе 6 образуя единый элемент, называемый пьезоэлектрическим генератором с маг нитострикционным приводом. По концам стержня 4 закреплены полюсные бешмаки 7 датчика с дополнительной обмокой 8, в которой наводится сигнал, характеризующий скорость перемещения объекта. Полюсные башмаки 7 и стержень 4 являются неподвижной частью 9 магнитопровода датчика. Подвижная часть датчика образована ферромагнит ным коммутатором Юс источником 11 магнитодвижущей силы (постоянным маг нитом) . Датчик работает следующим образом При вращении ферромагнитного коммутора 10, за счет источника 11 МДС в магнитострикционном стержне 4 наводится знакопеременное магнитное поле. Стержень 4 деформируется, пьез элементы сжимаются, а на их обкладках появляется электрический сигнал, .который используется для определения положения движущегося объекта. Одновременно в обмотке 8 наводится сигнал, величина которого пропорциональ на скорости /перемещения коммутатора 10. Этот сигнал снимается с выходов 12. Датчик положения и скорости отно:;ится к многофункциональным автономным датчикам генераторного типа. В нем объединены два генератора - магнитоэлектрический и пьезоэлектрический с магнитострикционным приводом. В связи с этим он обладает следующими особенностями: на выходе 5 сигнал (практически без изменения) может сохраняться в течение нескольких секунд при неподвижном комьлутаторе 10; величина, сигнала на выходе 5 в диапазоне частот от 0,1 Гц до 1,5 кГц не зависит от скорости перемещения коммутатора и определяется напряженностью -магнитного поля и сердечника 4,сигнал с выхода 12 практически линейно зависит от частоты врацения коммутатора 10. Экспериментальные исследования датчика показали его высокую чувствительность, надежность и стабильность в работе. Экспериментальные кривые выходного напряжения датчика с выходов 5 и 12 приведены на фиг.2. На фиг. 2а показаны осциллограммы, снятые на низких .частотах, а на фиг. 2б - на высоких. По данным эксперимента построены графики зависимости величины сигнала с выходов 5 и 12 датчика от частоты. Предлагаемый датчик особенно эффективно использовать в бесконтактных двигателях постоянного тока, исаользуемых в регулируемом электроприводе, в цифровых системах зажигания двигателей внутреннего сгорания и других случаях, когда необходимо иметь информацию о положении и скорости движущегося объекта одновременно.; Формула изобретения Датчик.положения и скорости по авт.св. № 859797, отличающийс я тем, что, с целью расширения функциональных возможностей путем получения информации о скорости, полюсные наконечники магнитопровода датчика снабжены обмотками, включенными последовательно согласно. Источники информации, принятые во внимание при экспертизе 1.Юферов Л.А. и Потапов Ф.М. Измерение вращающих моментов и скоростей вращения микроэле тродвигателей. М. , 1974, с. 95-96. 2.Проектирование датчиков-для измерения механических величин.Под ред. Е.П.Осадчего. М., 1979. с. 130. 3.Авторское свидетельство СССР по заявке № 2850746, кл. G 01 Р 5/46, 06.12.79 (прототип).
3612
6шА
V
S
J
/jr.f
Фиг.1
npuf-fj
f
L
-м
2П
J
.Z
Фиг.г
npuff
Im
Umi
Фиг,$
