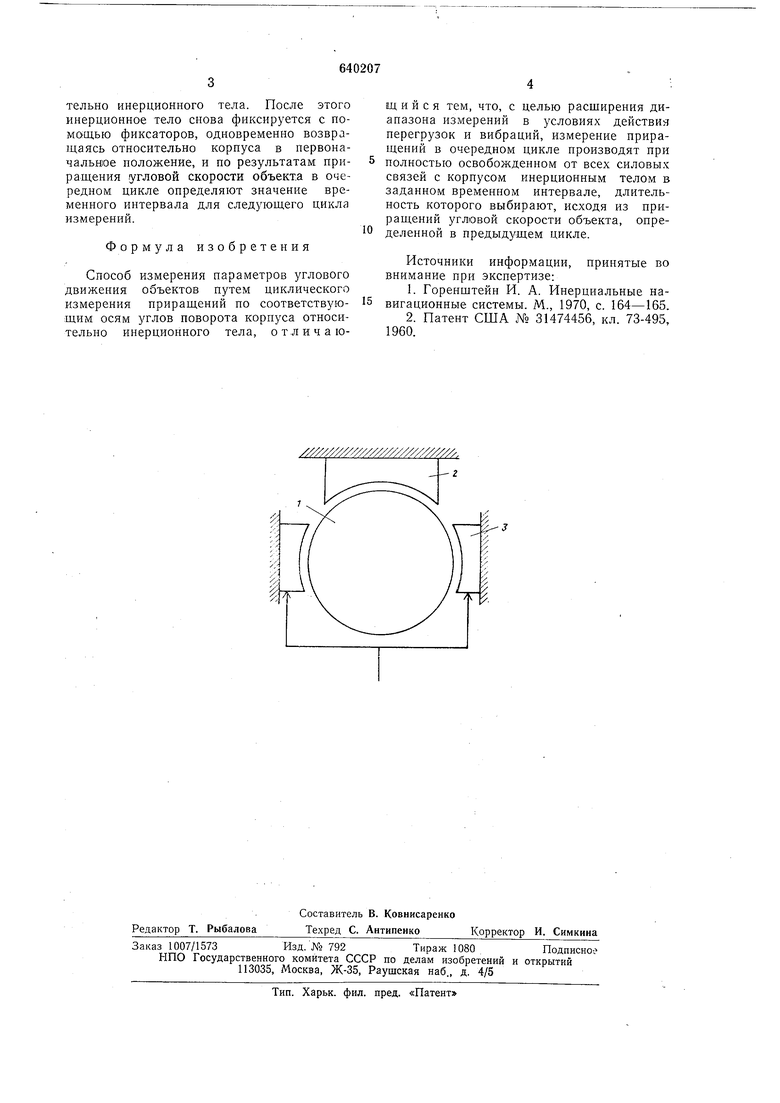
тельно инерционного тела. После этого инерционное тело снова фиксируется с помощью фиксаторов, одновременно возвращаясь относительно корпуса в первоначальное положение, и по результатам приращения угловой скорости объекта в очередном цикле определяют значение временного интервала для следующего цикла измерений.
Формула изобретения
Способ измерения параметров углового движения объектов путем циклического измерения приращений по соответствующим осям углов поворота корпуса относительно инерционного тела, отличающийся тем, что, с целью расширения диапазона измерений в условиях действия перегрузок и вибраций, измерение приращений в очередном цикле производят при полностью освобожденном от всех силовы.ч связей с корпусом инерционным телом в заданном временном интервале, длительность которого выбирают, исходя из приращений угловой скорости объекта, определенной в предыдущем цикле.
Источники информации, принятые во внимание при экспертизе:
1.Горенштейн И. А. Инерциальные навигационные системы. М., 1970, с. 164-165.
2.Патент США № 31474456, кл. 73-495, 1960.