Область техники, к которой относится изобретение
Предполагаемое изобретение относится к области совершенствования поршневых компрессорных установок тягового подвижного состава, например дизельного тягового подвижного состава, на котором компрессоры приводятся от теплового двигателя. На дизельном тяговом подвижном составе применяются следующие приводы компрессоров: механический неотключаемый от главного теплового двигателя; электрический;
гидродинамический с регулируемой муфтой; гидродинамический с нерегулируемой муфтой; привод от вспомогательного теплового двигателя (нетключаемый) [Тепловозы. Конструкция, теория и расчет. / Под ред. Н.И. Панова. - М.: Машиностроение, 1976. - 544 с.].
Эксплуатация компрессорных установок на локомотивах значительно отличается от эксплуатации их в стационарных условиях. Из-за специфики поездной работы, конструкционных особенностей локомотивов и типов привода компрессоров это отличие характеризуется переменными скоростью вращения вала, давлением нагнетания, температурными условиями, частыми пусками и остановками или сменами рабочего и холостого хода [Шарунин А.А. Эксплуатационные испытания локомотивных компрессоров ПК-35 и ПК-3,5. Труды ЦНИИ МПС, 1970, Вып.413].
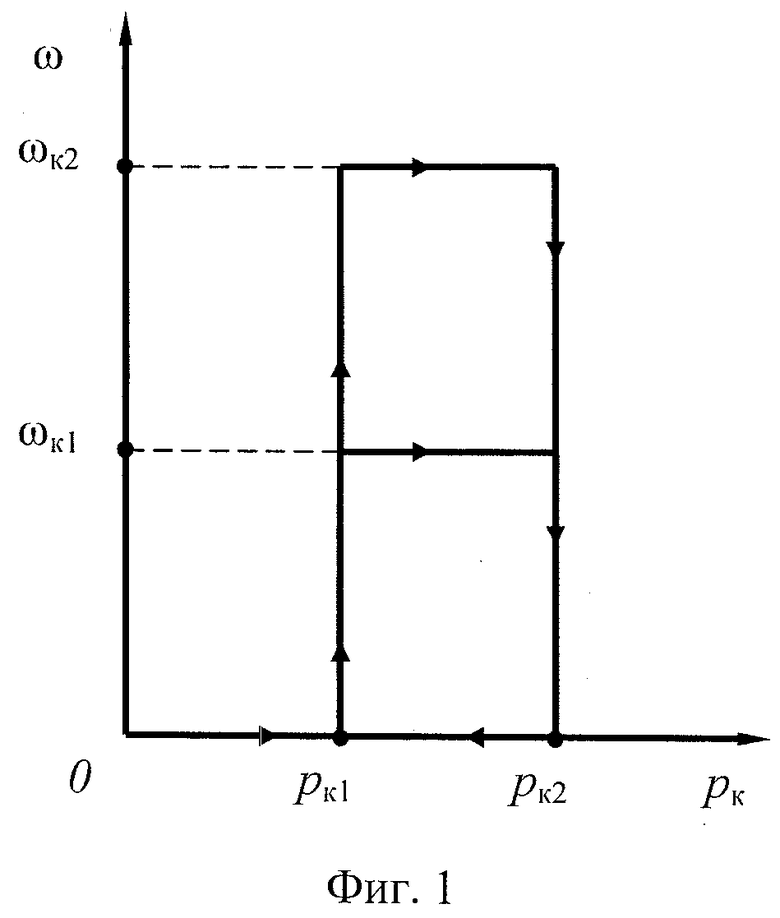
Известно, что из всех применяемых способов изменения подачи Q2 и давления рк компрессоров способ изменения их путем изменения частоты вращения вала компрессора ωк является наиболее эффективным. Однако, для поддержания давления воздуха рк в пневматической системе тягового транспортного средства широко применяются релейные автоматические системы регулирования давления (АСРД), в которых функции исполнительно-регулирующих устройств (ИРУ), т.е. исполнительных механизмов (ИМ) в совокупности с регулирующими органами (РО), выполняют привод компрессора и собственно компрессор. Сама пневматическая система тягового транспортного средства является объектом регулирования давления (ОРД). Автоматический регулятор давления (АРД) содержит кроме исполнительно-регулирующего устройства еще управляющий орган (УО), состоящий из устройств - измерительного (ИУ), задающего (ЗУ), сравнивающего (СУ) и усилительно-преобразующего [Луков Н.М. Космодамианский А.С. Автоматические системы управления локомотивов. - М.: ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2007, с.342-343]. На объект регулирования давления ОРД действуют внешние возмущающие воздействия λ1, λ2 и λ3: расход воздуха из пневматической системы Q1, температура Та и давление ра атмосферного (всасываемого) воздуха. Изменения этих возмущающих воздействий приводят к изменениям регулируемой величины φ - давления рк [Пластинин П.И. Поршневые компрессоры. Т.1. Теория и расчет. - М.: КолосС, 2006. - с.114-119]. Для поддержания давления рк в заданном диапазоне автоматический регулятор давления изменяет подачу воздуха Q2 в пневматическую систему. Автоматический релейный двухпозиционный регулятор давления имеет статические характеристики в виде петли (см. фиг.1. Статические характеристики автоматического релейного двухпозиционного регулятора давления) при максимальной ωк1 и минимальной ωк2 частоте вращения вала компрессора. При работе автоматической системы регулирования давления величина рк изменяется в пределах от рк1 до рк2. Повышение давления рк от рк1 до рк2 осуществляется при работе компрессора с максимальной скоростью вращения вала ωк макс и максимальной подачей Q2 макс. При этом наблюдается максимальная скорость износа деталей цилиндро-поршневой группы компрессора и увеличенный расход смазки. [Банников В.А., Манышин А.П. Влияние режимов работы компрессоров на износ деталей цилиндро-поршневой группы и расход смазки. - Коломна, Труды ВНИТИ, 1983, Вып.58]. Результаты испытаний показывают, что скорость износа деталей компрессора возрастает как с увеличением ωк, так и с увеличением рк, причем более сильное влияние на увеличение скорости износа оказывает давление рк. [Цыкунов Ю.И. Результаты испытаний на износ компрессоров ПК-35 и ПК-3,5. - М.: НИИИНФОРМТЯЖМАШ, Транспортное машиностроение, 1968, Вып.13]. С повышением ωк и давления нагнетания рк расход смазки увеличивается. [Банников В.А., Маньшин А.П. Влияние режимов работы компрессоров на износ деталей цилиндро-поршневой группы и расход смазки. - Коломна, Труды ВНИТИ, 1983, Вып.58]. Для уменьшения износа деталей цилиндро-поршневой группы компрессора и уменьшения расхода смазки необходимо применять плавное регулирование давления рк наиболее эффективным способом - изменением ωк, при котором уменьшается время работы компрессора при ωк макс и рк макс-. Анализ свойств автоматических регуляторов давления релейного двухпозиционного и непрерывного действия показывает, что при непрерывном регулировании давления компрессор работает больше времени при пониженной ωк и пониженном рк, что способствует уменьшению скорости износа деталей цилиндро-поршневой группы и уменьшению расхода смазки (стоимость которой на порядок выше стоимости дизельного топлива) [Цыкунов Ю.И., Лесин В.И. Результаты испытаний опытных образцов локомотивных компрессоров ПК-3,5 и ПК-1,75. - М.: НИИИнформТяжМаш, Транспортное машиностроение, 1968, Вып.5-67-14].
Уровень техники
Известна автоматическая система регулирования давления [Патент РФ №2239221], содержащая пневматическую систему, соединенную с компрессором, приводимым от вала теплового двигателя посредством механического редуктора и гидродинамической муфты переменного наполнения, вход которой соединен с регулирующим золотником подачи масла в гидродинамическую муфту, в которой применен регулятор давления масла, содержащий центробежный измеритель скорости вращения вала компрессора, соединенный с валом компрессора, и мембранно-клапанной системой, регулирующей подачу масла от источника давления к золотнику, который в свою очередь регулирует подачу масла к гидродинамической муфте.
Известна автоматическая система регулирования давления [Патент РФ №2258014], содержащая пневматическую систему, соединенную с компрессором, приводимым от вала теплового двигателя посредством механического редуктора и гидродинамической муфты переменного наполнения, вход которой соединен с регулирующим золотником подачи масла в гидродинамическую муфту, в которой применен микропроцессорный управляющий орган непрерывного действия, к входам которого подключены посредством аналого-цифровых преобразователей датчик давления, соединенный трубопроводом с пневматической системой тягового транспортного средства, и датчик скорости вращения вала компрессора, соединенный с валом компрессора, а выход микропроцессорного управляющего органа связан через цифро-аналоговый преобразователь с усилителем, подключенным к обмотке тягового электромагнита, непосредственно соединенного с измерительной пружиной и золотником подачи масла в гидродинамическую муфту.
Известна также автоматическая система регулирования давления [Патент РФ №2258015], содержащая пневматическую систему, соединенную с компрессором, приводимым от вала теплового двигателя посредством механического редуктора и гидродинамической муфты переменного наполнения, вход которой соединен с регулирующим золотником подачи масла в гидродинамическую муфту, в которой применен управляющий орган непрерывного действия, регулирующий золотник которого связан с мембранным пружинным одностороннего действия приводом, соединенным трубопроводом с пневматической системой тягового транспортного средства.
Аналог предполагаемого изобретения, наиболее близкий к нему по совокупности существенных признаков (прототип)
Известна автоматическая система регулирования давления в пневматической системе тягового транспортного средства [Патент РФ №2258838], содержащая пневматическую систему, соединенную с компрессором, приводимым от вала теплового двигателя посредством механического редуктора и гидродинамической муфты переменного наполнения, вход которой соединен с регулирующим золотником подачи масла в гидродинамическую муфту. В ней применен микропроцессорный управляющий орган, к входам которого подключены посредством аналого-цифровых преобразователей датчик давления, соединенный трубопроводом с пневматической системой тягового транспортного средства, и датчик скорости вращения вала компрессора, соединенный с валом компрессора, а выход микропроцессорного управляющего органа связан через цифро-аналоговый преобразователь с усилителем, подключенным к преобразователю электрического сигнала в пневматический, вход которого также соединен с пневматической системой тягового транспортного средства, а выход - со входом мембранного пружинного одностороннего действия привода золотника подачи масла в гидродинамическую муфту, причем в автоматической системе регулирования давления может быть реализован как пропорциональный закон работы регулятора, так и более сложный, например ПИД или комбинированного регулирования.
Эта автоматическая система регулирования давления, также, как и все три аналога предполагаемого изобретения [Патенты РФ №№2239221, 2258014, 2258015], обладает существенным недостатком. В ней гидродинамический привод компрессора содержит гидродинамическую муфту переменного наполнения. Коэффициент полезного действия гидродинамического привода компрессора изменяется пропорционально частоте вращения вала компрессора (при постоянной частоте вращения вала приводного теплового двигателя). Коэффициент полезного действия механического привода компрессора имеет значения, близкие к единице (0,94…0,96) и не изменяется при изменении частоты вращения вала компрессора (см. фиг.2. Зависимости коэффициентов полезного действия механического ηмп (линия а) и гидродинамического ηгп (линия б) привода компрессора от относительной частоты вращения его вала) [Луков Н. М. Автоматическое регулирование температуры двигателей. - М.: Машиностроение, 1995, с.111-112]. Энергетическая эффективность (произведение коэффициентов полезного действия и относительной частоты вращения выходного вала) гидродинамического привода при равномерном распределении во времени частот вращения выходного вала в 2,11 раза меньше, чем механического (0,45 и 0,95) привода. В результате затраты энергии на сжатие воздуха при механическом приводе (с одной передачей) компрессора намного меньше, чем при гидродинамическом приводе. Если механический привод имеет не одну ступень передачи, а, например, три с соотношением частот вращения вала компрессора: 0,25; 0,5 и 1,0, то энергетическая эффективность механического привода компрессора на этих передачах будет 0,238; 0,238 и 0,475 соответственно, а гидродинамического привода 0,0275; 0,084 и 0,34 соответственно. В результате отношения энергетических эффективностей механического и гидродинамического привода составят 8,65; 2,83 и 1,4 соответственно. Это означает, что затраты энергии на сжатие воздуха при механическом приводе (с тремя передачами) компрессора меньше, чем при гидродинамическом приводе в 8,65; 2,83 и 1,4 раза соответственно.
Механический привод компрессора также имеет меньшую удельную массу на единицу мощности, меньшие габаритные размеры и меньшую стоимость, чем гидродинамический привод.
Однако, автоматический релейный двухпозиционный регулятор давления с механическим приводом (с одной ступенью передачи) компрессора имеет существенные недостатки.
Регулирование давления осуществляется релейно путем включения и выключения компрессора при срабатывании управляющего органа - реле давления. Разность давлений включения рк2 и выключения рк1 компрессора представляет собой зону нечувствительности (возврата) регулятора 2ΔZнч, которая является статическим параметром настройки регулятора. Включения и выключения компрессора приводят к колебаниям давления со значительными амплитудами и частотами и к увеличенному расходу топлива дизелем, масла компрессором и к уменьшению надежности привода компрессора и самого компрессора.
Сущность изобретения
Предлагаемая автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства не имеет недостатков, присущих известной автоматической системе регулирования давления в пневматической системе тягового транспортного средства [Патент РФ №№2258838], так как она содержит автоматический релейный многопозгщшмный микропроцессорны и регулятор давления с механическим приводом компрессора. Чем больше позиций имеет релейный регулятор, тем больше релейная система с таким регулятором приближается к системе непрерывного действия по показателям качества работы. В предлагаемом многопозиционном регуляторе применена планетарная коробка перемены передач (ПКП) с тремя ступенями. По сравнению с коробками передач, образованными простыми зубчатыми механизмами, ПКП обладают следующими преимуществами [Филичкин Н.В. Анализ планетарных коробок передач транспортных и тяговых машин. Челябинск, Ю-УрГТУ, 2005, стр.9-12]:
1. Более высокая удельная мощность при малых габаритах и массе. Это обусловлено передачей мощности параллельными потоками одновременно через несколько пассивных звеньев - сателлитов в каждом нагруженном планетарном механизме;
2. Высокие значения КПД;
3. Простота как ручного, так и автоматического управления ПКП;
4. Соосность компоновки, то есть совпадение осей ведущего и ведомого валов;
5. Практически полное отсутствие радиальных нагрузок на основных звеньях ПКП.
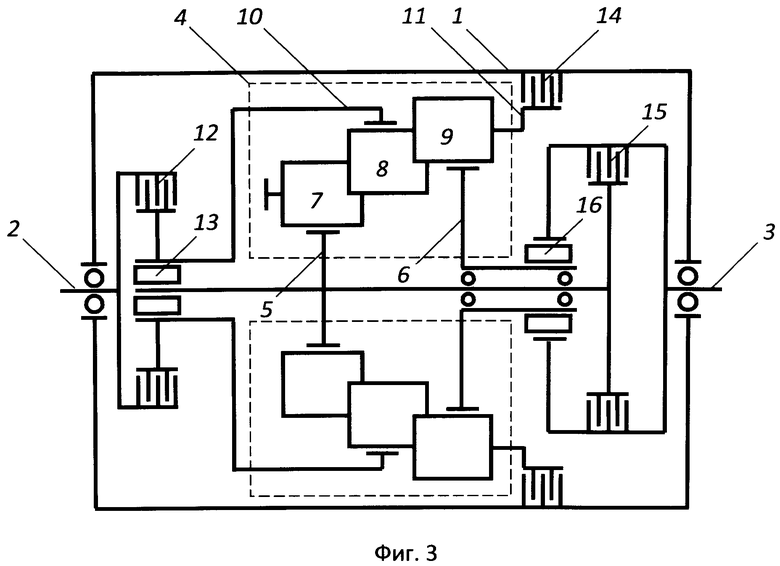
В корпусе 1 ПКП с тремя ступенями передачи (см. фиг.3. Принципиальная схема планетарной коробки перемены передач) установлены входной вал 2, выходной вал 3 и сложный четырехзвенный планетарный механизм компактной структуры 4, который содержит: два центральных солнечных зубчатых колеса 5 и 6, три сцепленных между собой сателлита 7, 8, 9, связанных соответственно: первый сателлит 7 - с первым центральным солнечным колесом 5, второй сателлит 8 - с эпициклическим колесом 10, а третий сателлит 9 - со вторым центральным солнечным колесом 6; и водило 11. Входной вал 2 может быть связан с эпициклическим колесом 10 через первый блокировочный фрикцион ПБФ 12 и при этом входной вал 2 имеет возможность соединения при помощи механизма свободного хода 13 с первым центральным солнечным колесом 5. При этом водило 11 может быть остановлено тормозным фрикционом ТФ 14. Далее, центральное солнечное зубчатое колесо 5 и выходной вал 3 могут быть связаны при помощи второго блокировочного фрикциона ВБФ 15. И, кроме того, выходной вал 3 может быть связан с центральным солнечным зубчатым колесом 6 посредством механизма свободного хода 16.
Такая ПКП обеспечивает исключение разрыва потока мощности при переключении передач путем последовательного включения очередных элементов управления (двух фрикционов ПБФ, ВБФ и одного тормозного фрикциона ТФ) без отключения предыдущих. ПКП работает следующим образом: для включения первой ступени передачи включается первый блокировочный фрикцион ПБФ 12 и заклиниваются механизмы свободного хода 13 и 16. Вращение передается с ведущего вала 2 через включенный блокировочный фрикцион ПБФ 12 на эпициклическое колесо 10, через механизм свободного хода 13 - на солнечное колесо 5. При этом, поскольку два звена планетарного механизма 4 приобрели одинаковую угловую скорость, такую же скорость будут иметь остальные два звена планетарного механизма: центральное солнечное зубчатое колесо 6 и водило 11. Центральное солнечное колесо 6 через заклиненный механизм свободного хода 16 приведет во вращение выходной вал 3.
Для включения второй передачи ПКП включается тормозной фрикцион ТФ 14, при этом первый блокировочный фрикцион ПБФ 12 не выключается, но отключается механизм свободного хода 13 из-за того, что при остановленном водиле 11 солнечное колесо 5 приобретет большую, чем у эпициклического колеса 10 угловую скорость. Вращение передается с входного вала 2 ПКП через оставленный включенным блокировочный фрикцион ПБФ 12 на эпициклическое колесо 10, далее на третий сателлит 9 и второе центральное солнечное колесо 6, с него на оставшийся заклиненным механизм свободного хода 16 и на выходной вал 3.
Для включения третьей ступени передачи ПКП включается второй блокировочный фрикцион ВБФ 15, при этом первый блокировочный фрикцион ПБФ 12 и тормозной фрикцион ТФ 14 остаются включенными, а механизм свободного хода 16 расклинивается, так как из-за включения второго блокировочного фрикциона ВБФ 15 выходной вал 3 приобретает угловую скорость, большую, чем у солнечного колеса 6. Вращение передается с ведущего вала 2 ПКП через включенный первый блокировочный фрикцион ПБФ 12 на эпициклическое колесо 10, далее на второй сателлит 8, первый сателлит 7 и с него - на первое центральное солнечное колесо 5, второй блокировочный фрикцион ВБФ 15 и на выходной вал 3.
Таким образом, при работе ПКП при переходе со ступени передачи на смежную ступень как в восходящем, так и в нисходящем порядке, не происходит разрыва потока мощности, поскольку не отключаются включенные предыдущие управляющие элементы, а подключается следующий при переключении на высшую, либо выключается последний при переходе на низшую ступень передачи, что сопровождается автоматическим заклиниванием или расклиниванием механизмов свободного хода 13 и 16.
Для управления фрикционами ПКП применяются пневматические или гидравлические устройства (органы управления), содержащие электропневматический или электрогидравлический вентиль (клапан) и пневматический или гидравлический поршневой или мембранный пружинный одностороннего действия механизм [Харитонов С.А. Автоматические коробки передач. - М.: ООО «Изд-во «Астрель», 2003. - 335 с].
В предлагаемой автоматической комбинированной микропроцессорной системе регулирования давления в пневматической системе тягового транспортного средства механический привод компрессора имеет более высокую надежность, так как компрессор включается в работу только на первой передаче, обеспечивающей пониженную частоту вращения компрессора ωк, например, 0,25 номинального значения. Затем следующее увеличение частоты вращения компрессора ωк при переходе с первой на вторую ступень передачи также небольшое и осуществляется без предварительного выключения компрессора. Увеличение частоты вращения ωк при переходе со второй на третью ступень передачи также небольшое и осуществляется без предварительного выключения компрессора. Эти условия обуславливают пониженные динамические нагрузки в элементах привода компрессора и значительное повышение его надежности. Применение пониженных передач и частот вращения компрессора обеспечивает значительное уменьшение затрат энергии на привод компрессора, повышение надежности привода и компрессора и уменьшение амплитуды и частоты колебаний давления рк что приводит к уменьшению расхода топлива тяговым транспортным средством и к повышению надежности компрессорной установки.
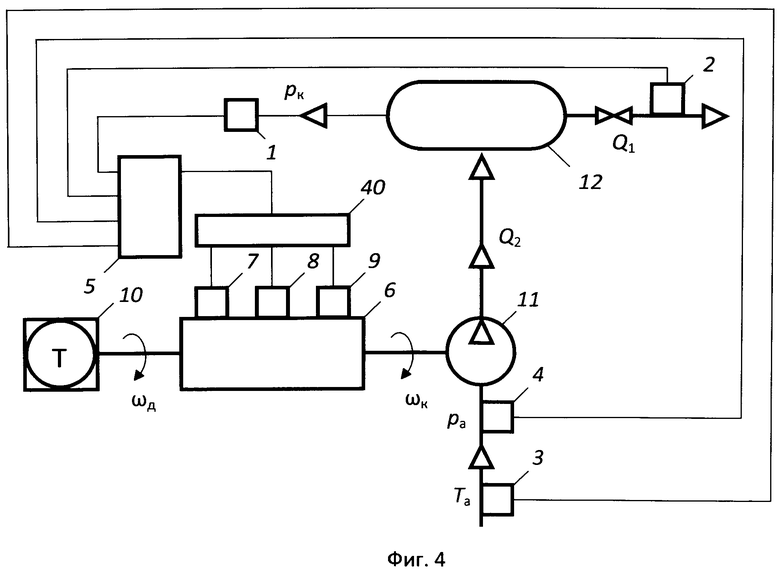
Автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства (фиг.4. Принципиальная блок-схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства) содержит датчик 17 давления воздуха ДДВ1 в пневматической системе 18, датчик 19 расхода воздуха ДРВ из пневматической системы, датчик 20 температуры атмосферного (всасываемого) воздуха ДТВ и датчик 21 давления атмосферного (всасываемого) воздуха ДДВ2, микропроцессорный контроллер (МПК) 22, планетарную коробку перемены передач ПКП 1, три органа управления фрикционами (ОУФ): 23 - первым блокировочным фрикционом, 24 - тормозным фрикционом и 25 - вторым блокировочным фрикционом, тепловой двигатель 26, вал которого соединен с входным валом планетарной коробки перемены передач, компрессор 27.
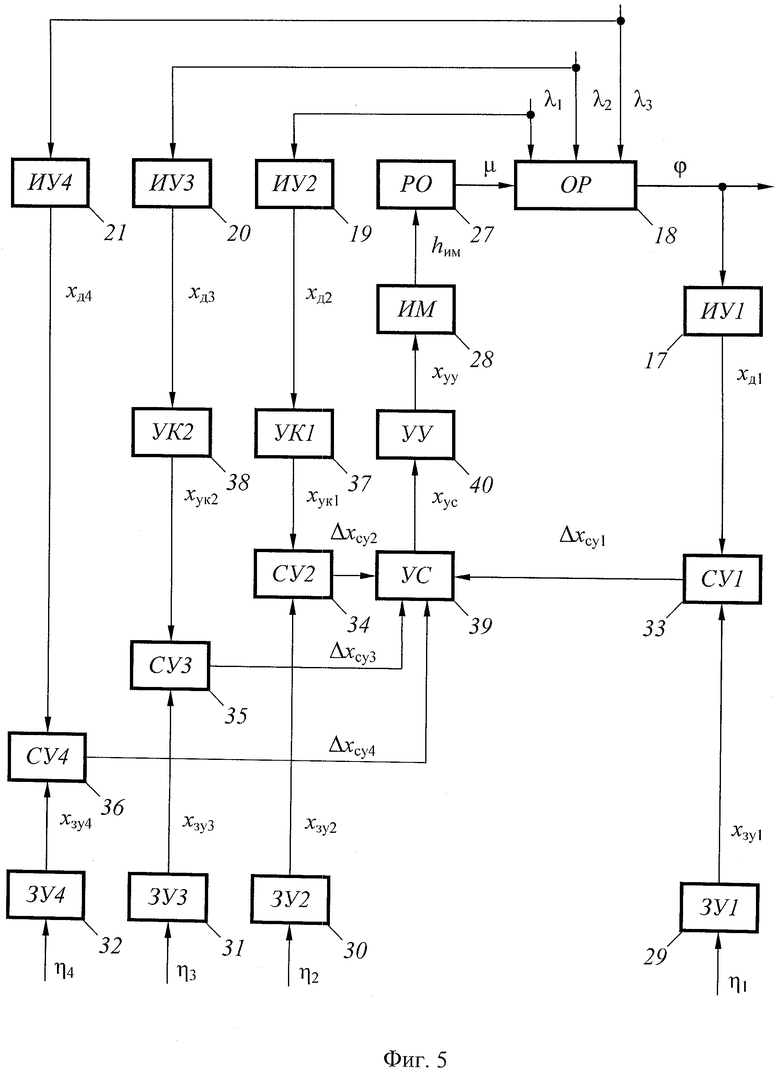
Автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства, содержит следующие функциональные элементы (фиг.5. Функциональная схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного): объект регулирования давления ОР 18 (пневматическую систему тягового транспортного средства), первое измерительное устройство (ИУ1) 17 (датчик давления рк воздуха в пневматической системе) с выходным сигналом хд1, второе измерительное устройство (ИУ2) 19 (датчик расхода Q1 воздуха из пневматической системы) с выходным сигналом Хд2, третье измерительное устройство (ИУЗ) 20 (датчик температуры Та атмосферного (всасываемого) воздуха) с выходным сигналом хд3, четвертое измерительное устройство (ИУ4) 21 (датчик давления атмосферного (всасываемого) воздуха ра) с выходным сигналом хд4, регулирующий орган (РО) 27 (компрессор К), исполнительный механизм (ИМ) 28 с выходным сигналом hим (механический привод компрессора ПК), четыре задающих устройства 29, 30, 31 и 32 - (ЗУ1), (ЗУ2), (ЗУЗ) и (ЗУ4) с сигналами задания η1, η2, η3, и с выходными сигналами хзу1, хзу2 и хзу3, четыре сравнивающих устройства 33, 34, 35 и 36 - (СУ1), (СУ2), (СУЗ) и (СУ4) с выходными сигналами Δхсу1 Δхсу2, Δхсу3 и Δхсу4, два устройства коррекции 37 и 38 - (УК1) и (УК2) статических характеристик измерительных устройств ИУ2 и ИУЗ с выходными сигналами хук1 и хук2, устройство суммирования 39 (УС) с выходным сигналом хус выходных сигналов сравнивающих устройств СУ1, СУ2, СУ3 и СУ4 и управляющее устройство 40 (УУ) с выходным сигналом хуу.
Устройства коррекции УК1 и УК2 статических характеристик измерительных устройств ИУ2 и ИУЗ предназначены для установления степени влияния сигналов возмущающих воздействий λ1 и λ2 на регулирующее воздействие µ. Степени влияния определяются значениями коэффициентов передачи устройств коррекции УК1 и УК2: kук1 и kук2 (статические параметры настройки регулятора). Например, давление воздуха в пневматической системе рк изменяется пропорционально давлению атмосферного (всасываемого) воздуха ра, а коэффициент пропорциональности (коэффициент передачи пневматической системы по давлению атмосферного (всасываемого) воздуха ра) равен единице. Поэтому для уменьшения влияния давления атмосферного (всасываемого) воздуха ра, на регулирующее воздействие µ, а значит и на давление воздуха в пневматической системе рк, необходимо делать меньше единицы значение коэффициента передачи устройства коррекции УК2.
Выходной сигнал устройства суммирования УС определяется из выражения

Автоматический микропроцессорный шестипозиционный регулятор давления с механическим приводом компрессора является комбинированным, так как в нем для управления исполнительно-регулирующим устройством кроме сигнала регулируемого величины φ - давления рк используются еще сигналы внешних возмущающих воздействий λ1, λ2, λ3 расхода воздуха из пневматической системы Q1, температуры атмосферного (всасываемого) воздуха Та, давления атмосферного (всасываемого) воздуха ра. В результате регулирующее воздействие µ на объект регулирования определяется выражением (алгоритмом работы комбинированного регулятора температуры) [Луков Н.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989, стр.19. Луков Н.М., А.С. Космодамианский. Автоматические системы управления локомотивов. - М.: ГОУ УМЦ по образованию на ж.-д. транспорте, стр.22]

где kp, kpλ1, kpλ2, kpλ3 - коэффициенты передачи регулятора по каналам действия регулируемой величины и возмущающих воздействий.
Автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства содержит четыре регулятора. Регулятор давления рк по отклонению его от заданного значения вместе с объектом регулирования образует замкнутый контур регулирования и содержит функциональные элементы: ИУ1, СУ1, ЗУ1, УС, УУ, ИМ И РО. Регулятор давления рк по расходу воздуха из пневматической системы Q1 вместе с объектом регулирования образует первый разомкнутый контур регулирования и содержит функциональные элементы: ИУ2, УК1, СУ2, ЗУ2, УС, УУ, ИМ И РО. Регулятор давления рк по температуре всасываемого воздуха Та вместе с объектом регулирования образует второй разомкнутый контур регулирования и содержит функциональные элементы: ИУ3, УК2, СУ3, ЗУ3, УС, УУ, ИМ И РО. Регулятор давления рк по давлению всасываемого воздуха ра вместе с объектом регулирования образует третий разомкнутый контур регулирования и содержит функциональные элементы: ИУ4, СУ4, ЗУ4, УС, УУ, ИМ И РО.
Автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства (см. фиг.6. Блок-схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства) содержит: датчик 17 давления рк воздуха в пневматической системе - ДДВ1, датчик 19 расхода воздуха Q1 из пневматической системы - ДРВ, датчик 20 температуры Та всасываемого воздуха - ДТВ, датчик 21 давления ра всасываемого воздуха - ДДВ2, устройства коррекции 37 и 38 - УК1 и УК2, задающие устройства 29, 30, 31 и 32 - ЗУ1, ЗУ2, ЗУ3 и ЗУ4, сравнивающие устройства 33, 34, 35 и 36 - СУ1, СУ2, СУ3 и СУ4, устройства суммирования 39 - УС и управления 40 - УУ, привод компрессора 28 - ПК, компрессор 27 - К и пневматическую систему 18 - ПС. Функции устройств УК1, УК2, ЗУ1, ЗУ2, ЗУЗ и ЗУ4, СУ1, СУ2, СУ3 и СУ4, УС и УУ выполняет микропроцессорный контроллер МПК.
Автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства работает следующим образом. При отключенных датчиках ДДВ1, ДРВ, ДТВ и ДДВ2 при трехступенчатом зубчатом редукторе в приводе компрессора микропроцессорный контроллер обеспечивает включение компрессора (при повышении давления рк до значений: рк2, рк4 и рк6) или выключение его (при понижении давления рк до значений: рк1, рк3 и рк5) при соответствующей передаче редуктора. В результате автоматический микропроцессорный многопозиционный релейный регулятор давления с механическим приводом компрессора будет иметь статические характеристики, представленные на фиг.7 (фиг.7. Статические характеристики автоматического микропроцессорного регулятора давления в пневматической системе тягового транспортного средства). При таком регуляторе давления поле статических характеристик автоматической микропроцессорной системы регулирования давления будет иметь вид, представленный на фиг.8 (фиг.8. Поле статических характеристик автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства). На фиг.8 видно, что при уменьшении расхода воздуха из пневматической системы Q1 амплитуда и размах колебаний давления рк увеличиваются. При этом также увеличивается период колебаний давления рк и остаточная неравномерность Δрк. Это обусловлено тем, что при уменьшении расхода воздуха из пневматической системы Q1 и температуры всасываемого воздуха Та увеличиваются постоянная времени и коэффициент передачи пневматической системы как объекта регулирования давления [Попов Е.П. Автоматическое регулирование и управление. - М.: Наука, 1966, стр.309-311. В.С. Прусенко. Пневматические системы автоматического регулирования технологических процессов. - М.: Машиностроение, 1987, стр.164, 165, 180-181]. Уменьшение среднего давления рк при уменьшении расхода воздуха из пневматической системы Q1 приводит к уменьшению точности регулирования давления рк, то есть к снижению качества работы системы регулирования. Увеличение амплитуды и периода колебаний давления рк отрицательно сказывается на технико-экономических показателях компрессора и пневматической системы.
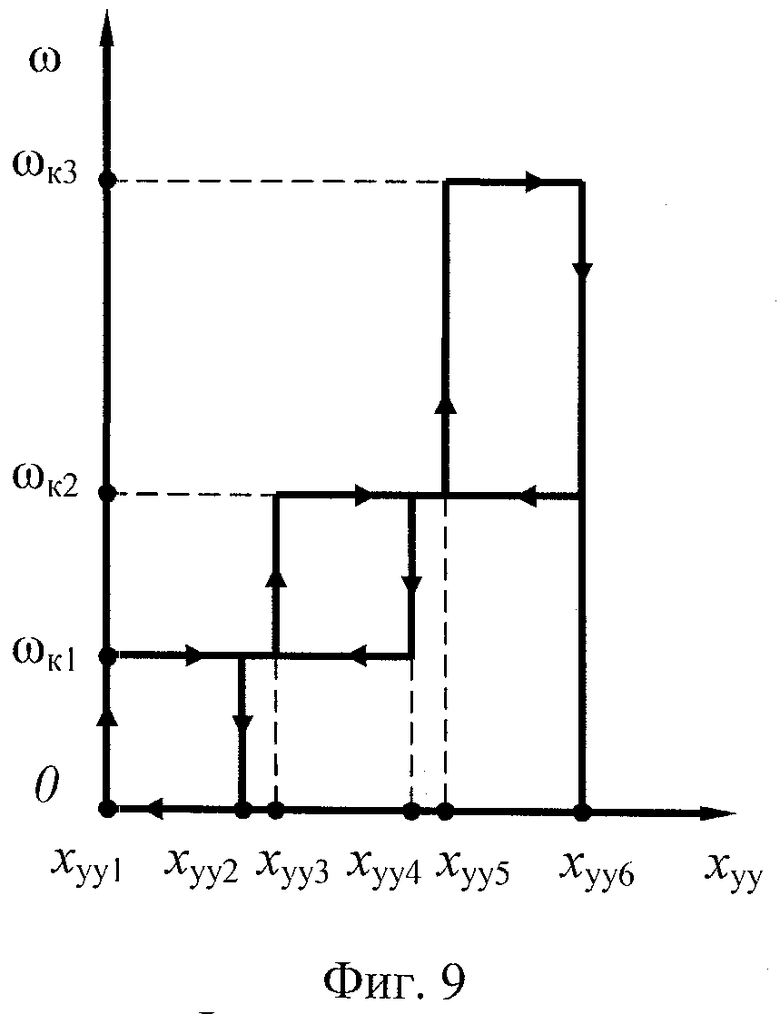
При включенных датчиках ДДВ1, ДРВ, ДТВ и ДДВ2 и при применении в приводе компрессора планетарной коробки передач микропроцессорный контроллер в соответствии с заложенной программой обеспечивает включение и выключение соответствующей ступени передачи в зависимости не только от сигнала давления рк, но и от сигналов по расходу воздуха из пневматической системы Q1, температуре всасываемого воздуха Та, давлению pa всасываемого воздуха. Автоматический комбинированный релейный многопозиционный микропроцессорный регулятор давления будет иметь статические характеристики (см. фиг.9. Статические характеристики автоматического комбинированного микропроцессорного регулятора давления в пневматической системе тягового транспортного средства), отличные от характеристик, приведенных на фиг.7. При этом алгоритм (закон) работы устройства управления УУ приводом компрессора ПК имеет вид:
ωв=ωв3 при хуу6<хуу<хуу5 - включены ПБФ и первая ступень передачи;
ωв=ωв2 при хуу4<хуу<хуу3 - включены ТФ и вторая ступень передачи;
ωв=ωв1 при хуу2<хуу<хуу1 - включены ВБФ и третья ступень передачи.
Для того, чтобы при уменьшении расхода воздуха из пневматической системы Q1 не увеличивалась амплитуда колебаний давления рк зона нечувствительности устройства управления УУ, а значит и регулятора давления рк уменьшается при уменьшении частоты вращения ωк компрессора. Зона нечувствительности устройства управления УУ: при первой передаче 2ΔZнч1=хуу5-хуу6, при второй передаче 2ΔZнч2=хуу3-хуу4 и при третьей передаче 2ΔZнч3=хуу1-хуу2. Соотношение зон нечувствительности: ΔZнч1=kz1ΔZнч2; ΔZнч2=kz2ΔZнчЧ3. Значения зоны нечувствительности ΔZнч1 и коэффициентов kz1 и kz2. являются статическими параметрами настройки регулятора. Интервалы хуу4-хуу5 и хуу2-хуу3 составляют 0,1-0,2 от зоны нечувствительности.
В результате поле характеристик автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства, содержащей автоматический комбинированный релейный многопозиционный микропроцессорный регулятор давления с механическим приводом компрессора, будет иметь вид, представленный на фиг.10 (фиг.10. Поле характеристик автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства). На фиг.10 видно, что при уменьшении расхода воздуха из пневматической системы Q1, среднее значение давления рк остается постоянным, также постоянной остается амплитуда колебаний давления рк.
Технический результат, который может быть получен при осуществлении предполагаемого изобретения
Осуществление предполагаемого изобретения позволит повысить качество регулирования давления и надежность механического привода компрессора, уменьшить расход топлива транспортным средством и стоимость системы. Технический результат достигается за счет того, что автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства содержит пневматическую систему, соединенную с компрессором, приводимым от вала теплового двигателя посредством зубчатого редуктора, датчик давления, соединенный трубопроводом с пневматической системой тягового транспортного средства, вал теплового двигателя соединен с валом компрессора посредством планетарной коробки перемены передач, в корпусе которой установлены входной вал, выходной вал и сложный четырехзвенный планетарный механизм компактной структуры, который содержит: два центральных солнечных зубчатых колеса и три сцепленных между собой сателлита, связанных соответственно: первый сателлит - с первым центральным солнечным колесом, второй сателлит - с эпициклическим колесом, а третий сателлит - со вторым центральным солнечным колесом, и водило; причем входной вал коробки может быть связан с эпициклическим колесом посредством первого блокировочного фрикциона и при этом входной вал имеет возможность соединения при помощи первого механизма свободного хода с первым центральным солнечным колесом; при этом водило может быть остановлено тормозным фрикционом; далее, центральное солнечное зубчатое колесо и выходной вал могут быть связаны при помощи второго блокировочного фрикциона; и, кроме того, выходной вал коробки передач может быть связан с центральным солнечным зубчатым колесом посредством второго механизма свободного хода; фрикционы соединены с тремя органами управления фрикционами, входящими в состав управляющего устройства, планетарная коробка перемены передач выполняет функции привода компрессора, который связан с управляющим устройством; регулятор дополнительно содержит датчик расхода воздуха из пневматической системы, датчик температуры всасываемого воздуха и датчик давления всасываемого воздуха; датчик давления воздуха в пневматической системе связан с первым сравнивающим устройством, датчик давления всасываемого воздуха связан с четвертым сравнивающим устройством, датчик расхода воздуха из пневматической системы и датчик температуры всасываемого воздуха связаны со вторым и третьим сравнивающими устройствами посредством первого и второго устройств коррекции статических характеристик этих датчиков; первое, второе, третье и четвертое сравнивающие устройства связаны соответственно с первым, вторым, третьим и четвертым задающими устройствами и с устройством суммирования, связанным в свою очередь с управляющим устройством привода компрессора.
Перечень фигур
Фиг.1. Статические характеристики автоматического релейного двухпозиционного регулятора давления
Фиг.2. Зависимости коэффициентов полезного действия механического ηмп (линия а) и гидродинамического ηгп (линия б) привода компрессора от относительной частоты вращения его вала
Фиг.3. Принципиальная схема планетарной коробки перемены передач
Фиг.4. Принципиальная блок-схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства
Фиг.5. Функциональная схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного
Фиг.6. Блок-схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства
Фиг.7. Статические характеристики автоматического микропроцессорного регулятора давления в пневматической системе тягового транспортного средства
Фиг.8. Поле статических характеристик автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства
Фиг.9. Статические характеристики автоматического комбинированного микропроцессорного регулятора давления в пневматической системе тягового транспортного средства
Фиг.10. Поле характеристик автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства
Перечень позиций, соответствующих на рисунках основным элементам автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства
Фиг.3 и 4:
1 - корпус планетарной коробки перемены передач;
2 - входной вал планетарной коробки перемены передач;
3 - выходной вал планетарной коробки перемены передач;
4 - четырехзвенный планетарный механизм компактной структуры планетарной коробки перемены передач;
5 и 6 - центральные солнечные зубчатые колеса планетарной коробки перемены передач;
7, 8 и 9 - сателлиты планетарной коробки перемены передач;
10 - эпициклическое колесо планетарной коробки перемены передач;
11 - водило планетарной коробки перемены передач;
12 - первый блокировочный фрикцион планетарной коробки перемены передач;
13 и 16 - механизмы свободного хода планетарной коробки перемены передач;
14 - тормозной фрикцион планетарной коробки перемены передач;
15 - второй блокировочный фрикцион планетарной коробки перемены передач;
16-см. поз.13.
Фиг.4, 5 и 6:
17 - датчик давления воздуха в пневматической системе (первое измерительное устройство);
18 - пневматическая система тягового транспортного средства (объект регулирования температуры);
19 - датчик расхода воздуха из пневматической системы (второе измерительное устройство);
20 - датчик температуры атмосферного (всасываемого) воздуха (третье измерительное устройство);
21 - датчик давления атмосферного (всасываемого) воздуха (четвертое измерительное устройство);
22 - микропроцессорный контроллер;
23 - орган управления первым блокировочным фрикционом;
24 - орган управления тормозным фрикционом;
25 - орган управления вторым блокировочным фрикционом;
26 - тепловой двигатель;
27 - компрессор (регулирующий орган);
28 - механический привод компрессора (исполнительный механизм);
29, 30, 31 и 32 - задающие устройства;
33, 34, 35 и 36 - сравнивающие устройства;
37 и 38 - устройства коррекции;
39 - устройство суммирования выходных сигналов сравнивающих устройств;
40 - управляющее устройство;
Перечень условных сокращений
АСРД - автоматическая система регулирования давления
ОРД - объект регулирования давления
АРД - автоматический регулятор давления
УО - управляющий орган
ИРУ - исполнительно-регулирующее устройство
ИУ, ИУ1, ИУ2, ИУ3 и ИУ4 - измерительное устройство
ЗУ, ЗУ1, ЗУ2, ЗУ3 и ЗУ4 - задающее устройство
УУ - управляющее устройство
УК1 и УК2 - устройства коррекции
СУ, СУ1, СУ2, СУ3 и СУ4 - сравнивающее устройство
ИМ - исполнительный механизм
РО - регулирующий орган
ПКП - планетарная коробка перемены передач
ПБФ - первый блокировочный фрикцион
ТФ - тормозной фрикцион
ВБФ - второй блокировочный фрикцион
ДДВ1 - датчик давления воздуха в пневматической системе
ДРВ - датчик расхода воздуха из пневматической системы
ДТВ - датчик температуры атмосферного (всасываемого) воздуха
ДДВ2 - датчик давления атмосферного (всасываемого) воздуха
МПК - микропроцессорный контроллер
ОУФ - орган управления фрикционом
ПС - пневматическая система тягового транспортного средства
К - компрессор
ПК - привод компрессора
Перечень обозначений величин
рк - давление воздуха, в пневматической системе тягового транспортного средства
Q2 - подача компрессора
ωк - частота вращения вала компрессора
λ1, λ2 и λ3 - возмущающие воздействия
Q1 - расход воздуха из пневматической системы
Та - температура атмосферного (всасываемого) воздуха
ра - давление атмосферного (всасываемого) воздуха
φ - сигнал регулируемой величины (давления воздуха в пневматической системе)
ηмп - КПД механического привода компрессора
ηгп - КПД гидродинамического привода компрессора
2ΔZнч - зона нечувствительности (возврата) регулятора
хд1 - выходной сигнал датчика давления воздуха в пневматической системе (первого измерительного устройства)
хд2 - выходной сигнал датчика расхода воздуха из пневматической системы (второго измерительного устройства)
хд3 - выходной сигнал датчика температуры атмосферного (всасываемого) воздуха (третьего измерительного устройства)
хд4 - выходной сигнал датчика давления атмосферного (всасываемого) воздуха (четвертого измерительного устройства)
hим - выходной сигнал исполнительного механизма (привода компрессора)
η1, η2, η3 и η4 - сигналы задания
хзу1, хзу2, хзу3, и хзу4 - выходные сигналы задающих устройств
хук1 и хук2 - выходные сигналы устройств коррекции
Δхсу1, Δхсу2, Δхсу3 и Δхсу4 - выходные сигналы сравнивающих устройств
хус - выходной сигнал устройства суммирования выходных сигналов сравнивающих устройств
хуу - выходной сигнал управляющего устройства
Δрк - остаточная неравномерность
kук1 и kук2 - коэффициенты передачи устройств коррекции
kp, kpλ1, kpλ2, и kpλ3 - коэффициенты передачи регулятора по каналам действия регулируемой величины и возмущающих воздействий
2ΔZнч1 - зона нечувствительности устройства управления при первой передаче
2ΔZнч2 - зона нечувствительности устройства управления при второй передаче
kz1 и kz2 - коэффициенты, характеризующие соотношение зон нечувствительности устройства управления при первой и второй передаче
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С МЕХАНИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2492335C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2503558C2 |
| АВТОМАТИЧЕСКАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2416814C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2283252C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2438045C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2258838C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2239220C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2258014C2 |
| ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕМЕНЫ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2207459C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2501961C2 |





Изобретение относится к автоматической комбинированной микропроцессорной системе регулирования давления в пневматической системе тягового транспортного средства. Автоматическая комбинированная система содержит компрессор, датчик расхода воздуха из пневматической системы, датчик температуры всасываемого воздуха и датчик давления всасываемого воздуха. Компрессор соединен с валом теплового двигателя посредством планетарной коробки перемены передач. Планетарная коробка перемены передач содержит фрикционы. Фрикционы соединены с тремя органами управления фрикционами. Компрессор связан с управляющим устройством. Датчик давления воздуха в пневматической системе связан с первым сравнивающим устройством. Датчик давления всасываемого воздуха связан с четвертым сравнивающим устройством. Датчик расхода воздуха из пневматической системы и датчик температуры всасываемого воздуха связаны со вторым и третьим сравнивающими устройствами посредством первого и второго устройств коррекции статических характеристик этих датчиков. Первое, второе, третье и четвертое сравнивающие устройства связаны соответственно с первым, вторым, третьим и четвертым задающими устройствами и с устройством суммирования. Устройство суммирования связано с управляющим устройством привода компрессора. Технический результат заключается в повышении надежности. 10 ил.
Автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства содержит пневматическую систему, соединенную с компрессором, приводимым от вала теплового двигателя посредством зубчатого редуктора, датчик давления, соединенный трубопроводом с пневматической системой тягового транспортного средства, отличающаяся тем, что вал теплового двигателя соединен с валом компрессора посредством планетарной коробки перемены передач, в корпусе которой установлены входной вал, выходной вал и четырехзвенный планетарный механизм компактной структуры, который содержит: два центральных солнечных зубчатых колеса и три сцепленных между собой сателлита, связанных соответственно: первый сателлит - с первым центральным солнечным колесом, второй сателлит - с эпициклическим колесом, а третий сателлит - со вторым центральным солнечным колесом, и водило, причем входной вал коробки может быть связан с эпициклическим колесом посредством первого блокировочного фрикциона и при этом входной вал имеет возможность соединения при помощи первого механизма свободного хода с первым центральным солнечным колесом, при этом водило может быть остановлено тормозным фрикционом, далее центральное солнечное зубчатое колесо и выходной вал могут быть связаны при помощи второго блокировочного фрикциона; и, кроме того, выходной вал коробки передач может быть связан с центральным солнечным зубчатым колесом посредством второго механизма свободного хода; фрикционы соединены с тремя органами управления фрикционами, входящими в состав управляющего устройства, планетарная коробка перемены передач выполняет функции привода компрессора, который связан с управляющим устройством, регулятор дополнительно содержит датчик расхода воздуха из пневматической системы, датчик температуры всасываемого воздуха и датчик давления всасываемого воздуха, датчик давления воздуха в пневматической системе связан с первым сравнивающим устройством, датчик давления всасываемого воздуха связан с четвертым сравнивающим устройством, датчик расхода воздуха из пневматической системы и датчик температуры всасываемого воздуха связаны со вторым и третьим сравнивающими устройствами посредством первого и второго устройств коррекции статических характеристик этих датчиков, первое, второе, третье и четвертое сравнивающие устройства связаны соответственно с первым, вторым, третьим и четвертым задающими устройствами и с устройством суммирования, связанным в свою очередь с управляющим устройством привода компрессора.
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2239220C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2283252C1 |
| US 2008149067 A1, 26.06.2008 | |||
| US 2010155157 A1, 24.06.2010. | |||

