Изобретение относится к машиностроению и может быть использовано для передачи усилия от ведомого звена к ведущему как при вращательном движении, так и при поступательном.
Известен способ передачи момента от ведомого шкива к ведущему посредством заклинивания между ними ролика с поверхностью из фрикционного материала [А.с. СССР №50916, F16H 13/04, 1937 - аналог].
Недостатками такого способа являются:
- ограниченные функциональные возможности, обусловленные только передачей вращательного момента, причем лишь только в одну сторону;
- зависимость величины передаваемого момента вращения от частоты вращения шкивов вследствие изменения коэффициента трения качения от скорости.
Прототипом является способ работы передаточного механизма, включающий передачу момента вращения от ведомого шкива к ведущему посредством заклинивания ролика между шкивами, поверхность которых выполнена из упругого фрикционного материала [А.с. СССР №1795201, F16H 13/04, 1993].
Недостатками прототипа являются:
- ограниченные функциональные возможности, обусловленные только передачей момента вращения в одну сторону;
- зависимость величины передаваемого момента вращения от частоты вращения шкивов вследствие изменения коэффициента трения качения от скорости;
- отсутствие регулирования максимальной величины момента, передаваемого на ведомый шкив;
- реализация способа только для устройств, использующих вращательное движение;
- невозможность поддерживания допустимого момента вращения на ведомом шкиве после кратковременного его превышения, поскольку ролик выходит из зацепления и его следует каким-то образом возвращать на прежнее место для возобновления вращения ведомого шкива.
Задачей изобретения является устранение указанных недостатков, а именно, расширение функциональных возможностей и повышение надежности.
Задача решается тем, что в способе работы передаточного механизма, включающем передачу допустимого усилия от ведомого звена к ведущему посредством упругого элемента одного звена и тела качения, при величине усилия, непревышающего допустимого значения, фиксируют звенья относительно друг друга путем заклинивания тела качения между упругим элементом и другим звеном, а при превышении этого значения - снимают фиксацию и воздействуют на ведомое звено допустимым усилием.
Упругий элемент выполняют составным. Упругий элемент выполняют с переменной жесткостью. Фиксирование производят и при обратном движении ведущего звена. Фиксацию осуществляют и снимают и при обратном движении ведущего звена.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Фиксирование звеньев относительно друг друга путем заклинивания тела качения между упругим элементом и другим звеном при величине усилия, непревышающего допустимого значения, позволяет повысить надежность работы, поскольку поверхность звеньев не истирается о тело качения в процессе эксплуатации, как это имеет место в прототипе.
Снятие фиксации и воздействие на ведомое звено допустимым усилием при превышении нагрузки на этом звене повышает надежность работы, так как, во-первых, сохраняется противодействие моменту нагрузки, благодаря чему можно избежать неприятных последствий, которые могут возникнуть при раскручивании ведомого звена моментом нагрузки.
Во-вторых, после приведения момента нагрузки в норму вращение ведомого звена автоматически возобновляется.
Выполнение упругого элемента составным и с переменной жесткостью способствует увеличению пределов регулирования величины максимального усилия, передаваемого ведомому звену, что расширяет функциональные возможности.
Выполнение фиксирования звеньев при обратном движении ведущего звена позволяет передавать усилие на ведомое звено при обратном вращении ведущего звена, что расширяет функциональные возможности.
Осуществление фиксации и снятие ее при обратном движении ведущего звена позволяет ограничивать передаваемое на ведомое звено усилие при обратном вращении.
Изобретение поясняется чертежами.
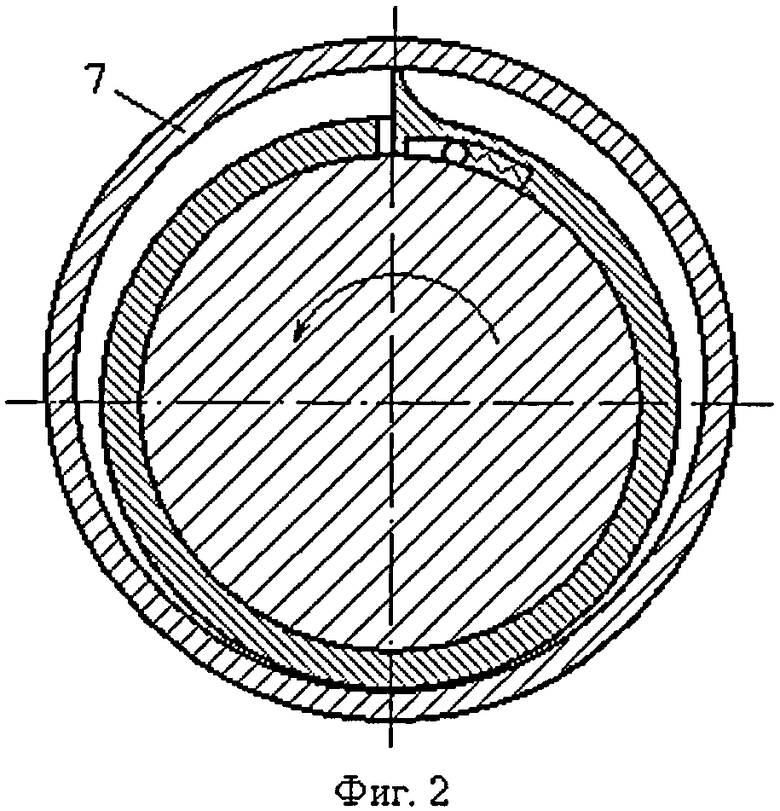
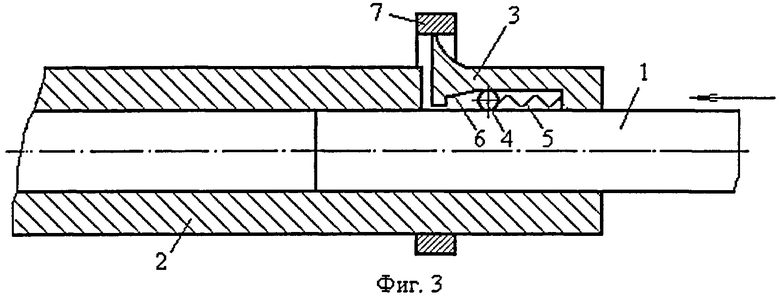
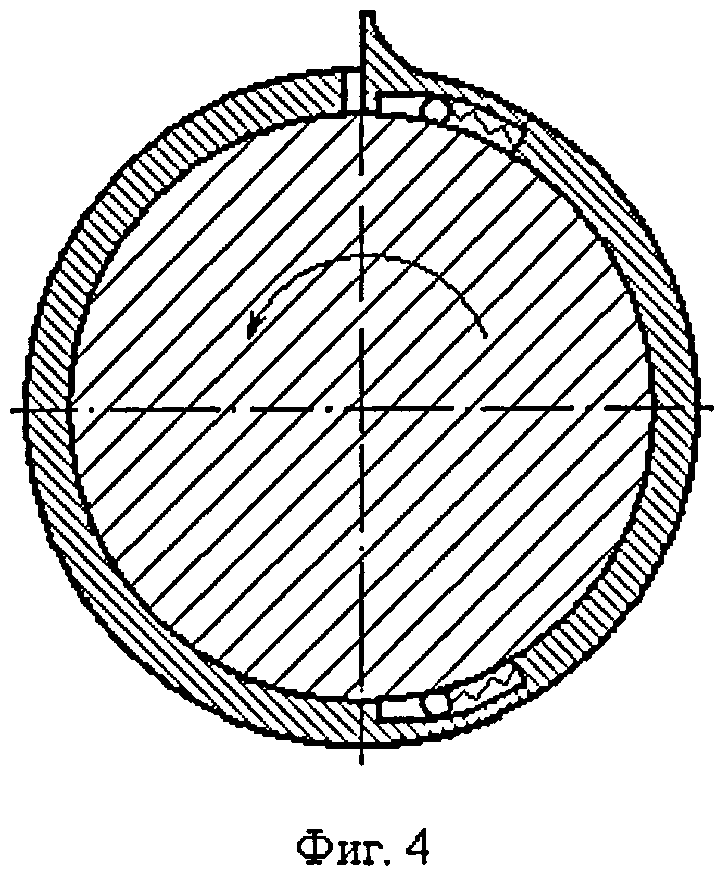
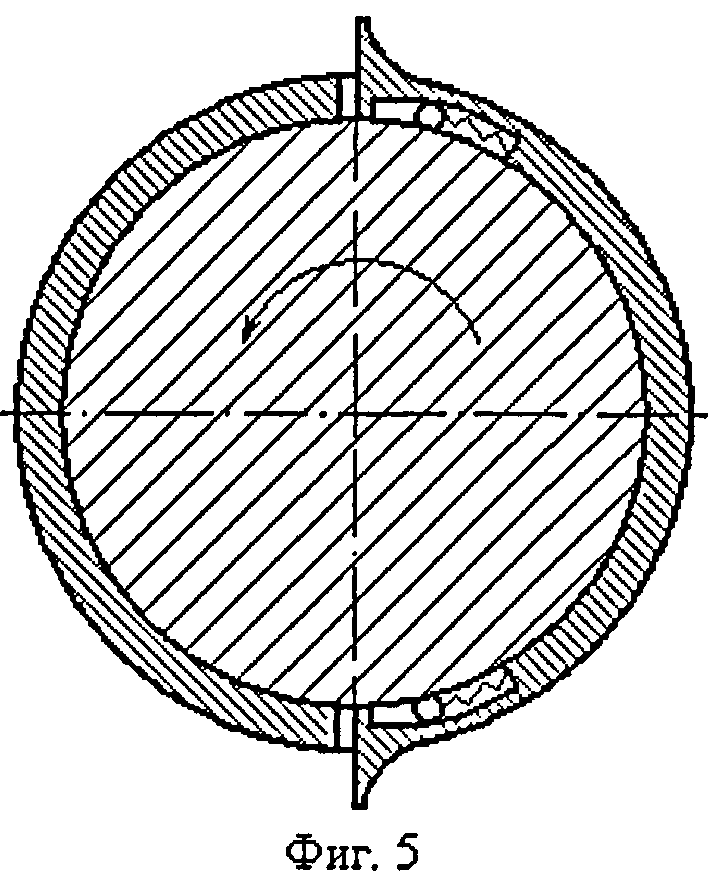
На фиг.1 изображен передаточный механизм, обеспечивающий допустимый момент на ведомом звене при вращении в одну сторону и отсутствие момента при вращении в другую. На фиг.2 изображен передаточный механизм с составным упругим элементом. На фиг.3 изображен передаточный механизм с поступательным перемещением звеньев, обеспечивающий допустимое усилие на ведомом звене при движении в одну сторону и отсутствие усилия при движении в другую. На фиг.4 изображен передаточный механизм, обеспечивающий допустимый момент на ведомом звене при вращении в одну сторону и передачу момента с ведущего звена при вращении в другую. На фиг.5 изображен передаточный механизм, обеспечивающий допустимый момент на ведомом звене при вращении в одну и другую стороны.
Передаточный механизм содержит ведущее 1 и ведомое 2 звенья, установленные с возможностью перемещения одного звена в другом, упругий элемент 3, выполненный заодно с ведомым звеном в виде консольной балки, контактирующей с телом 4 качения, поджатым пружиной 5 к ее заклинивающей поверхности 6 и к ведущему звену. Часть упругого элемента может быть выполнена в виде кольца 7.
Реализуют способ следующим образом.
При вращении ведущего звена 1 против часовой стрелки тело качения 4 находит на заклинивающую поверхность 6 упругого элемента 3, в результате чего звенья 1 и 2 фиксируются относительно друг друга, вращаясь заодно (фиг.1). Превышение моментом вращения допустимого значения приводит к продвижению тела качения по заклинивающей поверхности упругого элемента и к деформации (подъему) последнего. После прохождения всей заклинивающей поверхности тело качения начинает проворачиваться, фиксация звеньев прекращается, и они начинают проворачиваться друг относительно друга. Величина упругой деформации элемента 3 определяет величину допустимого момента, передаваемого от ведущего звена 1 к ведомому 2. При этом после снятия фиксации на ведомое звено 2 продолжает действовать момент, допустимого значения. При обратном вращении ведущего звена 1 никакого момента на ведомое звено не передается, так как тело качения 4 уходит с заклинивающей поверхности 6, преодолевая усилие пружины 5, и не препятствует вращению ведущего звена.
Если упругий элемент выполнить составным, надев на упругую балку, например кольцо 7, то величина допустимого момента будет зависеть и от усилия деформации этого кольца (фиг.2). Меняя толщину колец (или поворачивая кольцо, имеющее переменное сечение), можно варьировать величиной допустимого момента, передаваемого от ведущего звена к ведомому.
Аналогичным образом осуществляется передача допустимого усилия на ведомое звено при поступательном перемещении звеньев (фиг.3).
Если при вращении в обратном направлении требуется передавать на ведомое звено момент, действующий на ведущем звене, то упругий элемент выполняют переменной жесткости (фиг.4). При вращении в обратную сторону нижнее (по чертежу) тело качения заходит на заклинивающую поверхность и, поскольку жесткость в этом месте у звена 2 очень высока, то происходит заклинивание тела качения и фиксирование звеньев друг относительно друга, что способствует передачи момента с ведущего звена на ведомое. Если величину указанной жесткости снизить, то при вращении в обратную сторону на ведомое звено будет передаваться момент, величина которого будет определяться жесткостью нижнего (по чертежу) упругого элемента (фиг.5). Заметим, что для удобства описания заклинивающие поверхности разнесены, однако их можно значительно сблизить (практически вплотную) и использовать одно тело качения, которое в зависимости от направления вращения будет перекатываться с одной поверхности на другую.
Внедрение изобретения позволит создать простой по конструкции передаточный механизм, позволяющий ограничивать передаваемое усилие с ведущего звена на ведомое как при вращательном движении, так и при поступательном.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ТОРМОЗА ГРУЗОВОГО ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2011 |
|
RU2476341C1 |
| ДВУХСТУПЕНЧАТАЯ ПЕРЕДАЧА ДЛЯ ВЕЛОСИПЕДА | 2014 |
|
RU2569210C1 |
| СПОСОБ УПРАВЛЕНИЯ ГУСЕНИЧНОЙ МАШИНОЙ | 2024 |
|
RU2835218C1 |
| СПОСОБ СОЕДИНЕНИЯ ЗВЕНЬЕВ ПОНТОННО-МОСТОВОЙ ПЕРЕПРАВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2578224C1 |
| СПОСОБ ЗАРЯЖАНИЯ ПУШКИ | 2024 |
|
RU2829232C1 |
| СПОСОБ РАБОТЫ ГАЙКОВЕРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2582829C1 |
| ЧЕРВЯЧНАЯ ПРЕДОХРАНИТЕЛЬНАЯ МУФТА | 2012 |
|
RU2495288C1 |
| ЗАМОК С ДОВОДЧИКОМ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2725123C1 |
| МУФТА ПРЕДОХРАНИТЕЛЬНАЯ | 2015 |
|
RU2609613C1 |
| СПОСОБ РАБОТЫ СИЛОВОЙ УСТАНОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2827275C1 |
Изобретение относится к машиностроению и может быть использовано для передачи усилия от ведомого звена к ведущему. Способ работы передаточного механизма, заключающийся в том, что передают допустимое усилие от ведущего звена при вращении его в одну сторону к ведомому через один упругий элемент последнего и тело качения, и прерывают передачу при вращении в другую. При величине усилия, не превышающего допустимого значения, фиксируют звенья относительно друг друга путем заклинивания тела качения между одним упругим элементом ведомого звена и ведущим звеном, а при превышении этого значения расклинивают тело качения и воздействуют им на ведомое звено допустимым усилием. При этом при заклинивании тела качения на один упругий элемент воздействуют другим упругим элементом ведомого звена, выполненным с переменной жесткостью. Величину допустимого усилия меняют путем изменения взаимного положения упругих элементов. Достигается повышение надежности и функциональных возможностей устройства. 3 з.п. ф-лы, 5 ил.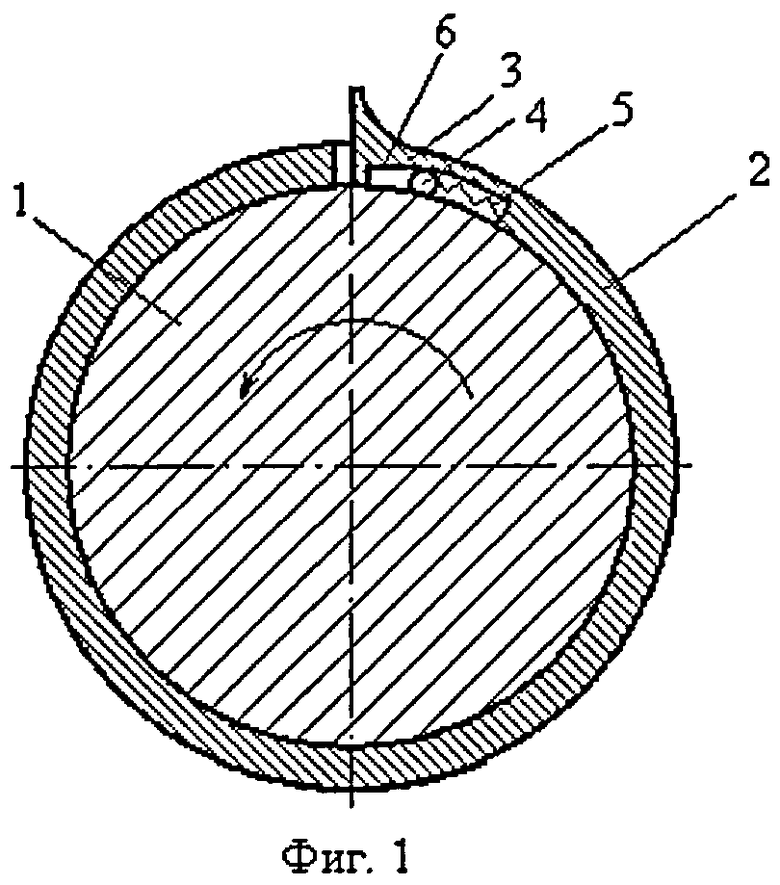
1. Способ работы передаточного механизма, включающий передачу допустимого усилия от ведущего звена при вращении его в одну сторону к ведомому, по крайней мере, через один упругий элемент последнего и тело качения и прерывание передачи при вращении в другую, отличающийся тем, что при величине усилия, не превышающего допустимого значения, фиксируют звенья относительно друг друга путем заклинивания тела качения, по крайней мере, между одним упругим элементом ведомого звена и ведущим звеном, а при превышении этого значения расклинивают тело качения и воздействуют им на ведомое звено допустимым усилием.
2. Способ по п.1, отличающийся тем, что при заклинивании тела качения на один упругий элемент воздействуют другим упругим элементом ведомого звена.
3. Способ по п.2, отличающийся тем, что другой упругий элемент выполняют с переменной жесткостью.
4. Способ по п.2, отличающийся тем, что величину допустимого усилия меняют путем изменения взаимного положения упругих элементов.
| Устройство для пожарной сигнализации | 1928 |
|
SU10251A1 |
| Предохранительная муфта | 1982 |
|
SU1032241A1 |
| Предохранительная муфта | 1986 |
|
SU1388606A1 |
| Поляков B.C | |||
| и др | |||
| СПРАВОЧНИК ПО МУФТАМ | |||
| - ЛЕНИНГРАД: МАШИНОСТРОЕНИЕ | |||
| ЛЕНИНГРАДСКОЕ ОТДЕЛЕНИЕ, 1979, с.256, рис | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| О'ОЗИАЯ | 0 |
|
SU380879A1 |
| Упругая предохранительная муфта | 1987 |
|
SU1449728A1 |
| JP 3074633 A, 29.03.1991 | |||
| Механизм свободного хода | 1985 |
|
SU1286854A1 |
| РОЛИКОВАЯ МУФТА СВОБОДНОГО ХОДА | 2002 |
|
RU2224923C2 |

