Изобретение относится к транспортным средствам - гусеничным и колесным с бортовым способом поворота машинам и может быть использовано преимущественно в роботизированных военных транспортных средствах.
Прототипом является двухпоточная трансмиссия транспортной машины с бортовым способом поворота, содержащая коробку передач и механизм поворота, входные звенья которых параллельно присоединены к двигателю, бортовые суммирующие трехзвенные механизмы, каждый из которых одним входным своим звеном соединен с выходным звеном коробки передач, вторым входным своим звеном - с управляемым выходом механизма поворота, а выходным своим звеном - с бортовым редуктором, установленным на соответствующем борту перед ведущим колесом движителя машины, при этом вторые входные звенья бортовых суммирующих трехзвенных механизмов взаимосвязаны посредством устройства с передаточным отношением минус 1, при этом в ней дополнительно предусмотрен центральный трехзвенный механизм, два входных звена которого соединены, соответственно, с двигателем и с выходным звеном коробки передач, а третье, выходное, звено - с входным звеном механизма поворота [Пат. РФ 2599855, МПК B62D 11/06, 2016].
Недостатками прототипа являются:
- относительно сложная конструкция, обусловленная наличием планетарного редуктора, большого числа узлов и деталей;
- сложность автоматизации процесса управления;
- большие массогабаритные характеристики системы управления, реализующей способ.
Задачей изобретения является упрощение конструкции, повышение ее надежности и улучшение эксплуатационных характеристик.
Задача решается тем, что в способе управления гусеничной машиной, включающем передачу от двигателя крутящего момента на механизм поворота и через механизм передач - на редуктор трансмиссии, в механизме поворота вращение выходного звена осуществляют за счет винтового движения входного звена через кинематическую пару, одно звено которой выполняют в виде вала с радиальными впадинами и выступами, а другое - в виде зубчатого колеса, при этом винтовое движение создают, по крайней мере, одной червячной передачей, червячное колесо которой затормаживают.
Затормаживание червячного колеса осуществляют посредством электромагнита. Второй червячной передачей создают винтовое движение входного звена в направлении, противоположном создаваемому первой червячной передачей. Передачу крутящего момента на механизм поворота производят через шлицевое соединение.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Выполнение в механизме поворота вращения выходного звена за счет винтового движения входного звена через кинематическую пару, одно звено которой выполняют в виде вала с радиальными впадинами и выступами, а другое - в виде зубчатого колеса, упрощает реализующую способ конструкцию механизма поворота и повышает его надежность. Уменьшаются также и массогабаритные характеристики, что улучшает эксплуатационные характеристики.
Создание винтового движения, по крайней мере, одной червячной передачей, червячное колесо которой затормаживают, также упрощает конструкцию механизма поворота.
Выполнение затормаживания червячного колеса посредством электромагнита позволяет легко автоматизировать процесс поворота путем подачи электрического импульса на катушку электромагнита.
Создание второй червячной передачей винтового движения входного звена в направлении, противоположном создаваемому первой червячной передачей, сокращает время управления машиной, поскольку появляется возможность не переключать на реверс двигатель для возврата выходного звена механизма поворота в исходное положение. Все это улучшает эксплуатационные характеристики.
Выполнение передачи крутящего момента на механизм поворота через шлицевое соединение позволят передавать большой крутящий момент при малых габаритах, что уменьшает массогабаритные характеристики и повышает эксплуатационные характеристики.
Изобретение поясняется чертежами.
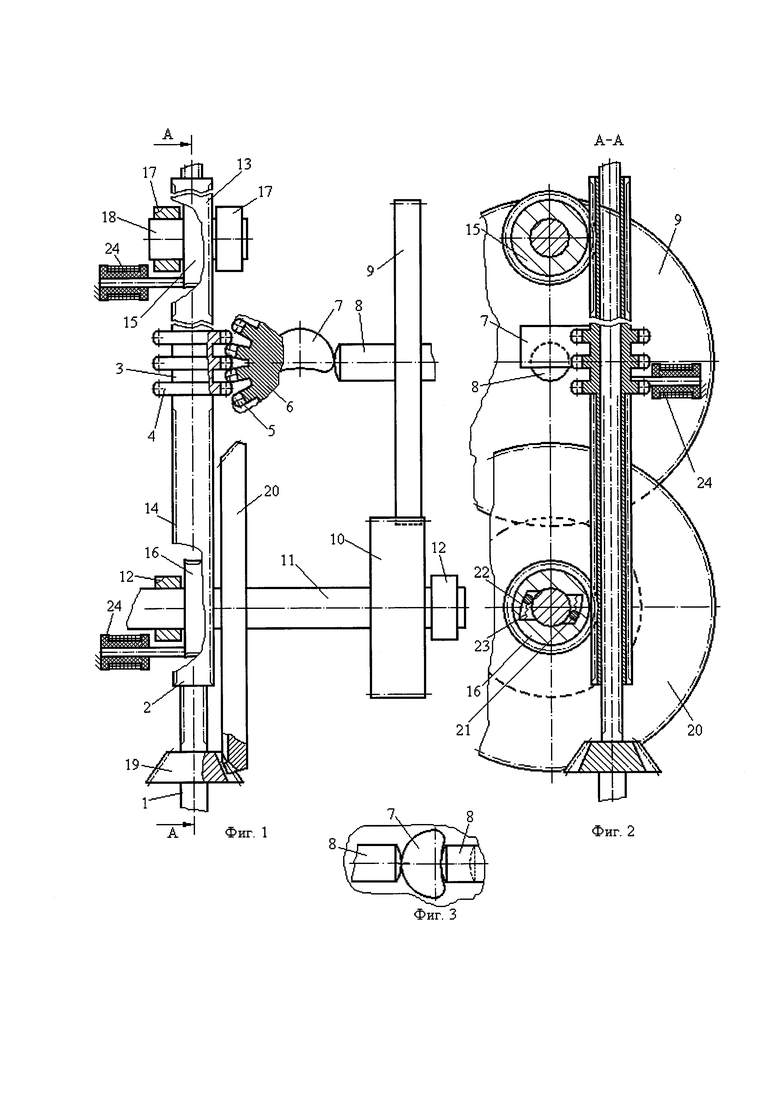
На фиг. 1 изображен механизм управления гусеничной машиной. На фиг. 2 изображен разрез А-А механизма. На фиг. 3 изображено положение выходного звена механизма поворота при повороте машины.
Механизм управления гусеничной машиной содержит сопряженные посредством, например, шлицевого соединения ведущий 1 и ведомый 2 валы, при этом одна часть последнего выполнена в виде радиальных впадин 3 и выступов 4, сопряженных с зубьями 5 колеса 6, на котором соосно жестко закреплен кулачок 7, имеющий возможность взаимодействия с имеющими возможность осевого перемещения и соответственно соединенными, например, с фрикционными муфтами, левой и правой полуосями 8, на каждой из которых жестко закреплено зубчатое колесо 9, сопряженное с шестерней 10, жестко закрепленной на валу 11, установленному с возможностью вращения в опорах 12. Вторая и третья части ведомого вала выполнены в виде имеющих противоположные направления навивки червяков 13, 14, соответственно сопряженных с червячными колесами 15, 16, при этом колесо 15 жестко установлено на имеющем возможность вращения в опорах 17 валу 18. Сопряженное с неподвижно закрепленной на ведущем валу шестерней 19 гипоидное 20 и червячное 16 колеса (каждое) связаны с валом 11 посредством муфт свободного хода, каждая из которых выполнена в виде размещенного между колесом и валом тела качения 21, подпружиненного к участку заклинивающей поверхности 22 упругим элементом 23. При этом зацепление колес с валом возможно только при вращении их в одну сторону, а посредством направления навивки червяка 14 обеспечивается противоположное вращение червячного 16 и гипоидного 20 колес. Каждое из колес 6, 15, 16 имеет возможность взаимодействия с фиксатором, например электромагнитом 24.
Способ реализуют следующим образом.
При движении прямо двигатель (не показан) вращает ведущий вал 1, который передает крутящий момент через шлицевое соединение на ведомый вал 2 и через шестерню 19 - на гипоидное колесо 20, которое вследствие нахождения тела качения 21 на заклинивающей поверхности 22 вращает вал 11 с шестерней 10 (повышенная передача), которая передает это вращение колесу 9 и полуоси 8, соединенной, например с фрикционной муфтой ведущей звездочки гусеницы (фиг. 1, 2). Заметим, что аналогичное вращение от вала 11 передается и к полуоси другого борта. При этом впадина кулачка 7 находится внизу, полуоси 8 максимально разведены (отдалены друг от друга), и фрикционные муфты обоих бортов включены. Червячные колеса 15, 16 вращаются вхолостую, колесо 6 заторможено электромагнитом 24 путем подачи на него напряжения (например, колесо притягивается к сердечнику электромагнита за счет упругой деформации своего материала или/и перемещения оси в пределах осевого люфта, или другим способом).
Отметим, что управление происходит в течение меньшего времени по сравнению с временем движения, поэтому с целью экономии энергии затормаживание может выполняться, наоборот, при отсутствии напряжения на электромагните, например, путем помещения подвижного якоря электромагнита между зубьями 5, и растормаживаться при наличии напряжения на электромагните за счет втягивания этого якоря.
Для поворота машины, например, направо растормаживают колесо 6, снимая напряжение с электромагнита 24 этого колеса, и затормаживают электромагнитом 24 червячное колесо 16, при этом червяк 14 вместе с валом 2 начинают двигаться вниз (фиг. 1). При этом выступы 4, воздействуя на зубья 5, поворачивают колесо 6 (по существу это реечная передача с круглой рейкой) заодно с кулачком 7 против часовой стрелки, в результате чего полуось 8 оказывается во впадине кулачка, и фрикционная муфта правого борта расцепляется (фиг. 3).
Заметим, что при установке такого механизма на обычное колесное транспортного средства, перемещение полуоси во впадину кулачка при повороте выполняет функцию дифференциала. При этом в случае потери сцепления с дорогой одного из колес, другое будет продолжать вращаться в нужном направлении, т.е. не нужно делать блокирование дифференциала, как это делается в обычных дифференциальных механизмах.
Левая ведущая звездочка продолжает вращаться, и машина делает правый поворот. После прохождения поворота снимают напряжение с электромагнита 24 червячного колеса 16 и подают напряжение на электромагнит 24 колеса 15. В результате этого колесо 16 начинает вращаться вхолостую, а колесо 15 затормаживается. Поскольку навивки у червяков 13, 14 имеют разные направления, то вал 2 будет двигаться вверх, увлекая за собой зубья 5 колеса 6, которое начнет поворачиваться по часовой стрелке. Как только кулачок 7 займет исходное первоначальное положение, снимают напряжение с электромагнита 24 колеса 15, растормаживая, тем самым, его, и фиксируют положение кулачка 7 подачей напряжения на электромагнит 24 колеса 6.
При необходимости перехода на пониженную передачу, например, при движении по сильно пересеченной местности или по затяжному крутому подъему изменяют направление вращения двигателя. При этом свободная муфта гипоидного колеса расцепляется, а червячное колесо 16 входит в зацепление с валом 11, который посредством шестерни 10 и колеса 9 передает крутящий момент от двигателя на полуось 8 каждого борта машины, которая начинает двигаться на пониженной передаче. Наличие в механизме передач червячной и гипоидной передач позволяет при малых габаритах получить большую разницу передаточных отношений, как за счет независимости выбора передаточного числа в каждой паре, так и за счет соотношения указанных передаточных чисел.
Управление на пониженной передаче осуществляется аналогично описанному, только, поскольку направление вращения червяка 14 изменилось, для перемещения вала 2 вниз затормаживают червячное колесо 15, а для движения вверх - колесо 16.
Внедрение изобретения позволит создать простой, надежный и удобный в эксплуатации механизм передач и поворота (МПП) с малыми массогабаритными характеристиками, который легко можно сделать с дистанционным управлением, подавая сигналы на соответствующие электромагниты. Кроме того, такой механизм может работать вместо дифференциала на колесной машине.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАРЯЖАНИЯ ПУШКИ | 2024 |
|
RU2829232C1 |
| СПОСОБ РАБОТЫ ГАЙКОВЕРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2582829C1 |
| СПОСОБ РАБОТЫ РАЗДАТОЧНОГО МЕХАНИЗМА | 2023 |
|
RU2822932C1 |
| МЕХАНИЗМ ПРИВОДА СТРЕЛОЧНОГО ПЕРЕВОДА | 2012 |
|
RU2501696C2 |
| СПОСОБ СОЕДИНЕНИЯ ЗВЕНЬЕВ ПОНТОННО-МОСТОВОЙ ПЕРЕПРАВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2578224C1 |
| ЧЕРВЯЧНАЯ ПРЕДОХРАНИТЕЛЬНАЯ МУФТА | 2012 |
|
RU2495288C1 |
| ПЕРЕДАЧА С ПРЕДОХРАНИТЕЛЬНЫМ ВЫКЛЮЧАТЕЛЕМ | 2014 |
|
RU2564261C1 |
| МЕХАНИЗМ ПРИВОДА СТВОРКИ НИШИ ШАССИ САМОЛЕТА | 2015 |
|
RU2609554C1 |
| СПОСОБ ЗАРЯЖАНИЯ ПУШКИ ТАНКА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2577744C1 |
| СПОСОБ РАБОТЫ ПАРОРАСПРЕДЕЛИТЕЛЬНОГО МЕХАНИЗМА ПАРОВОЗА | 2014 |
|
RU2544108C1 |
Изобретение относится к способу управления гусеничной машиной. При движении прямо ведущий вал передает крутящий момент через шлицевое соединение на ведомый вал и через шестерню - на гипоидное колесо. Гипоидное колесо вращает вал с шестерней, которая передает это вращение колесу и полуоси. Впадина кулачка находится внизу. Полуоси максимально разведены, и фрикционные муфты обоих бортов включены. Червячные колеса вращаются вхолостую. Колесо заторможено электромагнитом. Достигается упрощение конструкции, повышение ее надежности и улучшение эксплуатационных характеристик. 3 ил.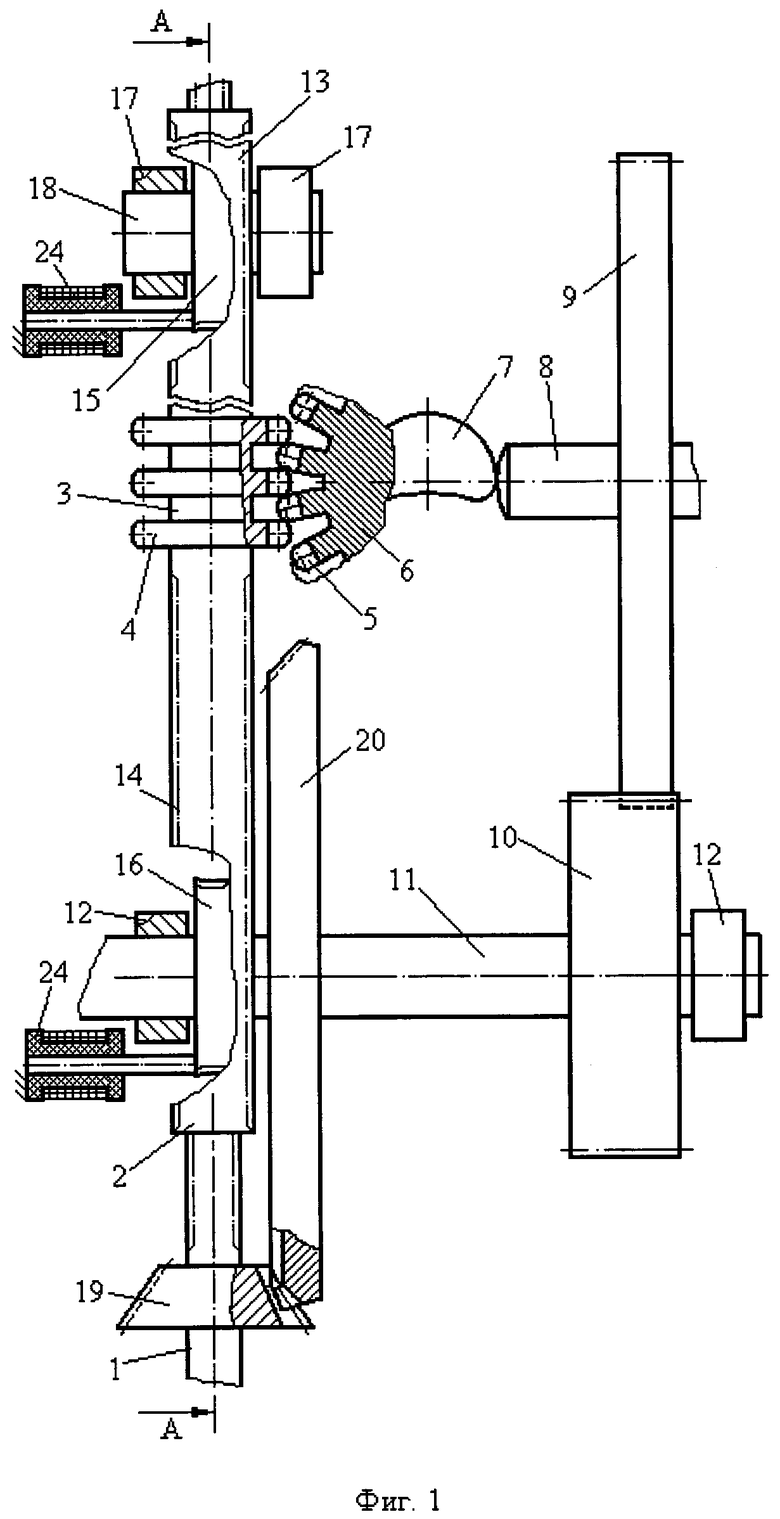
Способ управления гусеничной машиной, включающий передачу от двигателя крутящего момента на механизм поворота и на трансмиссию, отличающийся тем, что
при движении прямо двигатель вращает ведущий вал (1), который передает крутящий момент через шлицевое соединение на ведомый вал (2) и через шестерню (19) - на гипоидное колесо (20), которое вследствие нахождения тела качения (21) на заклинивающей поверхности (22) вращает вал (11) с шестерней (10), которая передает вращение колесу (9) и полуоси (8), соединенной с фрикционной муфтой ведущей звездочки гусеницы, причем аналогичное вращение от вала (11) передается и к полуоси другого борта, при этом одна часть ведомого вала (2) выполнена в виде радиальных впадин (3) и выступов (4), сопряженных с зубьями (5) колеса (6), на котором соосно жестко закреплен кулачок (7), взаимодействующий с имеющими возможность осевого перемещения левой и правой полуосями (8), вторая и третья части ведомого вала (2) выполнены в виде имеющих противоположные направления навивки червяков (13), (14), соответственно сопряженных с червячными колесами (15), (16), при этом колесо (15) жестко установлено на валу (18), червячное (16) колесо связано с валом (11) посредством муфты свободного хода, при этом впадина кулачка (7) находится внизу, полуоси (8) максимально разведены и фрикционные муфты обоих бортов включены, червячные колеса (15), (16) вращаются вхолостую, колесо (6) заторможено электромагнитом (24), для поворота машины, например, направо растормаживают колесо электромагнитом (24) этого колеса и затормаживают электромагнитом (24) червячное колесо (16), при этом червяк (14) вместе с ведомым валом (2) начинают двигаться вниз и выступы (4), воздействуя на зубья (5), поворачивают колесо (6) заодно с кулачком (7) против часовой стрелки, в результате чего фрикционная муфта правого борта расцепляется, при переходе на пониженную передачу изменяют направление вращения двигателя, при этом свободная муфта гипоидного колеса расцепляется, а червячное колесо (16) входит в зацепление с валом (11), который посредством шестерни (10) и колеса (9) передает крутящий момент от двигателя на полуось (8) каждого борта машины.
| ДВУХПОТОЧНАЯ ТРАНСМИССИЯ ТРАНСПОРТНОЙ МАШИНЫ С БОРТОВЫМ СПОСОБОМ ПОВОРОТА | 2015 |
|
RU2599855C1 |
| Трансмиссия гусеничного транспортного средства | 1983 |
|
SU1156932A1 |
| CN 201545048 U, 11.08.2010 | |||
| WO 8501784 A1, 25.04.1985 | |||
| Пневматический регулятор для всасывания и выливания жидкости из бескрановых микробюреток | 1960 |
|
SU135685A1 |
| МЕХАНИЗМ ПОВОРОТА | 2010 |
|
RU2441792C1 |

