Перекрестные ссылки на родственные заявки
Настоящая заявка относится к следующим заявкам, регистрируемым одновременно, и включает их в себя в качестве ссылок:
- Motorized Surgical Cutting and Fastening Having Magnetic Drive Torque Limiting Device, Attorney Docket № END6267USNP/070389;
- Motorized Surgical Cutting and Fastening Instrument, Attorney Docket № END6268USNP/070390;
- Motorized Surgical Cutting and Fastening Instrument, Having Handle Based Power Source, Attorney Docket № END6269USNP/070391; и
- Motorized Surgical Cutting and Fastening Instrument Having RF Electrodes, Attorney Docket № END6270USNP/070392;
- Motorized Surgical Cutting and Fastening Instrument Having Control Circuit for Optimizing Battery Usage, END6271USNP/070393.
Уровень техники
Хирургические степлеры используются при современном уровне техники для одновременного осуществления продольного рассечения в тканях и наложения линий скобок на противоположные стороны рассечения. Такие инструменты обычно включают в себя пару взаимодействующих губок, которые, если инструмент предназначается для эндоскопических или лапароскопических применений, способны проходить через проход канюли. Одна из губок вмещает в себя скобочный картридж, имеющий, по меньшей мере, два латерально расположенных ряда скобок. Другая губка определяет опору, имеющую карманы, формирующие скобки, ориентированные с рядами скобок в картридже. Такие инструменты, как правило, включают в себя множество совершающих возвратно-поступательное движение клиньев, которые, при движении вдаль, проходят через отверстия в скобочном картридже и зацепляются с ведущими элементами, поддерживающими скобки, для осуществления выстреливания скобок по направлению к опоре.
Пример хирургического степлера, пригодного для эндоскопических применений, описывается в опубликованной заявке на патент США, № публикации 2004/0232196 A1, озаглавленной, “Surgical stapling instrument, having separate distinct closing and firing systems”, описание которой включается сюда в качестве ссылки. При использовании врач способен смыкать губки степлера на ткани для позиционирования ткани перед выстреливанием. После того как врач определяет, что губки захватили ткань соответствующим образом, врач может осуществить выстреливание хирургическим степлером, тем самым, разрезая и скрепляя ткань. Одновременные этапы разрезания и скрепления устраняют осложнения, которые могут возникнуть, когда такие действия выполняются последовательно с помощью различных хирургических инструментальных средств, которые, соответственно, только режут или скрепляют скобками.
В дополнение к этому, из предыдущего уровня техники также известно включение в рабочий орган электродов, которые могут использоваться для испускания/приема радиочастотной энергии для образования кровоостанавливающей линии вдоль линии рассечения. Патент США №5403312, озаглавленный “Electrosurgical hemostatic device” (далее "'Патент 312"), который включается сюда в качестве ссылки, описывает электрохирургический инструмент с рабочим органом, который сжимает ткань между одним полюсом (или электродом) биполярного источника энергии на одной разделяющей поверхности, и вторым полюсом (или электродом) на второй разделяющей поверхности. Радиочастотная энергия прикладывается через сжатую ткань рабочему органу, который прижигает ткань. Рабочий орган, описанный в 'Патенте 312', также включает в себя скобки, для скрепления скобками ткани, сжатой в рабочем органе.
Моторизованные электродвигателем хирургические инструменты для резания и скрепления, в которых двигатель приводит в действие инструмент для резания, также известны из предыдущего уровня техники, как описано в опубликованной заявке на патент США, № публикации 2007/0175962 A1, озаглавленной “Motor-driven Surgical Cutting and fastening instrument with tactile position feedback,” которая включается сюда в качестве ссылки.
Сущность изобретения
В одном из общих аспектов, варианты осуществления настоящего изобретения направлены на хирургические инструменты для резания и скрепления. Инструменты могут представлять собой эндоскопические инструменты, такие как линейные эндоскопические режущие инструменты или дисковые эндоскопические режущие инструменты, или лапароскопические инструменты. Инструменты могут содержать скобки и/или радиочастотные электроды для скрепления ткани, зажатой в рабочем органе.
Некоторые варианты осуществления, описанные здесь, относятся к беспроводным приводимым в действие электродвигателем инструментам. Инструменты могут питаться от блока питания, содержащего источник питания постоянного тока, такой как один или несколько соединенных последовательно элементов батарей. Селекторный переключатель элементов может управлять тем, сколько элементов батарей используются для питания двигателя в данный момент, для управления мощностью, доступной для двигателя. Это дает возможность оператору инструмента лучше управлять как скоростью, так и мощностью двигателя. В другом варианте осуществления, инструмент может содержать регулятор мощности, включающий в себя, например, преобразователь напряжения постоянного тока в постоянный ток, который регулирует напряжение, прикладываемое к двигателю. Кроме того, устанавливаемое значение напряжения для регулятора мощности, может устанавливаться так, что напряжение, выдаваемое от источника питания, меньше, чем напряжение, при котором источник питания выдает максимальную мощность. Таким образом, источник питания (например, ряд соединенных последовательно элементов батарей) мог бы работать на “левой” или возрастающей стороне кривой мощности, с тем, чтобы было возможно увеличение мощности.
В дополнение к этому, в соответствии с различными вариантами осуществления, источник питания может содержать вторичные аккумуляторные устройства, такие как перезаряжаемые батареи или суперконденсаторы. Такие вторичные аккумуляторные устройства могут заряжаться многократно с помощью заменяемых батарей. Схема управления зарядкой может управлять зарядкой вторичных аккумуляторных устройств и обеспечивать различные сигналы состояния, такие как тревога, когда зарядка вторичных аккумуляторных устройств заканчивается.
В другом варианте осуществления, блок питания, содержащий вторичные аккумуляторные устройства, может отсоединяться от инструмента и присоединяться к удаленному базовому устройству зарядки. Базовое устройство зарядки может заряжать вторичные аккумуляторные устройства, например, от электрических сетей переменного тока или от батареи. Базовое устройство зарядки может также содержать процессор и блок памяти. Данные, хранящиеся в памяти отсоединяемого блока питания, могут загружаться в базовое устройство зарядки, из которого они могут выгружаться для последующего использования и анализа, например, пользователем (например, врачом), производителем или продавцом инструмента, и тому подобное. Данные могут содержать рабочие параметры, такие как информация о цикле зарядки, а также значения идентификационных параметров для различных заменяемых компонентов инструмента, таких как скобочный картридж.
В дополнение к этому, инструмент может содержать устройство для ограничения крутящего момента, для ограничения крутящего момента, прикладываемого двигателем, чтобы ограничить тем самым приводящие в действие силы, которые могут повредить компоненты инструмента. В соответствии с различными вариантами осуществления, устройства для ограничения крутящего момента могут представлять собой электромагнит или постоянный магнит, или механические зажимные устройства, соединенные (либо непосредственно, либо опосредованно) с выходным полюсом двигателя.
В другом общем аспекте, настоящее изобретение направлено на радиочастотные инструменты (то есть, на хирургические инструменты для резания и скрепления с электродами на рабочем органе для приложения радиочастотной энергии к ткани, удерживаемой с помощью рабочего органа) с новыми типами конфигураций электродов. Как правило, новые конфигурации электродов включают в себя сочетания малых активных электродов и больших обратных электродов. Малые активные электроды используются для концентрирования терапевтической энергии на ткани, в то время как большие обратные электроды преимущественно используются для замыкания цепи с минимальным воздействием на границу раздела этой ткани. Как правило, обратные электроды имеют большую массу и по этой причине способны оставаться более холодными во время электрохирургического применения.
В дополнение к этому, рабочий орган, в соответствии с различными вариантами осуществления, может содержать ряд коллинеарных сегментированных активных электродов. Сегментированные электроды могут запитываться синхронно или, более предпочтительно, последовательно. Активирование сегментированных электродов последовательно обеспечивает преимущества (1) уменьшения потребностей в мгновенной мощности из-за меньшей целевой площади коагуляции ткани и (2) предоставления возможности выстреливания другим сегментам, если один из них закорачивается.
В дополнение к этому, здесь описывается ряд механизмов для активирования радиочастотных электродов и для шарнирного сочленения рабочего органа.
Фигуры
Различные варианты осуществления настоящего изобретения описываются здесь в качестве примера в сочетании со следующими фигурами, на которых:
Фигуры 1 и 2 представляют собой виды в перспективе хирургического инструмента для резания и скрепления, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 3-5 представляют собой покомпонентные виды рабочего органа и вала инструмента, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 6 представляет собой вид сбоку рабочего органа, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 7 представляет собой покомпонентный вид рукоятки инструмента, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 8 и 9 представляют собой частичные виды в перспективе рукоятки, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 10 представляет собой вид сбоку рукоятки, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 11 представляет собой принципиальную схему схемы, используемой в инструменте, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 12-14 и 17 представляют собой принципиальные схемы схем, используемых для питания двигателя инструмента, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 15 представляет собой блок-схему, иллюстрирующую схему управления зарядкой, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 16 представляет собой блок-схему, иллюстрирующую базовое устройство зарядки в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 18 иллюстрирует типичную кривую мощности батареи;
Фигуры 19-22 иллюстрируют варианты осуществления электромагнитного устройства для ограничения крутящего момента зажимного типа, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 23-25, 27-28 и 59 представляют собой виды нижней поверхности опоры инструмента, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 26, 53, 54 и 68 представляют собой виды спереди поперечного сечения рабочего органа, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 29-32 показывают вариант осуществления рабочего органа, имеющего радиочастотные электроды, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 33-36 показывают другой вариант осуществления рабочего органа, имеющего радиочастотные электроды, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 37-40 показывают другой вариант осуществления конечного рабочего органа, имеющего радиочастотные электроды, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 41-44 показывают другой вариант осуществления рабочего органа, имеющего радиочастотные электроды, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 45-48 показывают другой вариант осуществления рабочего органа, имеющего радиочастотные электроды, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 49-52 показывают другой вариант осуществления рабочего органа, имеющего радиочастотные электроды, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 55 и 56 показывают виды сбоку рабочего органа, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 57 представляет собой схематическое изображение рукоятки инструмента, в соответствии с другим вариантом осуществления настоящего изобретения;
Фигура 58 представляет собой вид со срезом рукоятки варианта осуществления Фигуры 57, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 60-66 иллюстрируют многослойную печатную плату, в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 67 представляют собой схему, иллюстрирующую рабочий орган, в соответствии с различными вариантами осуществления настоящего изобретения; и
Фигуры 69 и 70 представляют собой схему инструмента, содержащего сборку гибкой шейки, в соответствии с различными вариантами осуществления настоящего изобретения.
Описание
Фигуры 1 и 2 изображают хирургический инструмент для резания и скрепления 10, в соответствии с различными вариантами осуществления настоящего изобретения. Иллюстрируемый вариант осуществления представляет собой эндоскопический инструмент и, как правило, варианты осуществления инструмента 10, описанные здесь, представляют собой эндоскопические хирургические инструменты для резания и скрепления. Необходимо отметить, однако, что в соответствии с другими вариантами осуществления настоящего изобретения, инструмент может представлять собой неэндоскопический хирургический инструмент для резания и скрепления, такой как лапароскопический инструмент.
Хирургический инструмент 10, изображенный на Фигурах 1 и 2, содержит рукоятку 6, вал 8 и шарнирно-сочлененный рабочий орган 12, поворотно соединенный с валом 8 с помощью штыря 14 шарнирного сочленения. Управление шарнирным сочленением 16 может предусматриваться рядом с рукояткой 6 для осуществления вращения рабочего органа 12 вокруг штыря 14 шарнирного сочленения. В иллюстрируемом варианте осуществления, рабочий орган 12 выполнен с возможностью действия в качестве разрезающего эндоскопического устройства, для зажимания, резания и скрепления скобками ткани, хотя в других вариантах осуществления могут использоваться различные типы рабочих органов, такие как рабочие органы для других типов хирургических устройств, такие как зажимы, ножи, степлеры, устройства для наложения скобок, устройства для осуществления доступа, устройства для лекарственной/генной терапии, ультразвуковые, радиочастотные или лазерные устройства, и тому подобное. Дополнительные детали относительно радиочастотных устройств можно найти в 'Патенте 312'.
Рукоятка 6 инструмента 10 может включать в себя спусковой механизм 18 смыкания и спусковой механизм 20 выстреливания для активирования рабочего органа 12. Будет понятно, что инструменты, имеющие рабочие органы, направленные на различные хирургические задачи, могут иметь различные количества или типы спусковых механизмов или других соответствующих средств управления для работы рабочего органа 12. Рабочий орган 12 показан как отделенный от рукоятки 6 с помощью предпочтительно продолговатого вала 8. В одном из вариантов осуществления, врач или оператор инструмента 10 может сочленять рабочий орган 12 с валом 8 посредством использования управления шарнирным сочленением 16, как описано более подробно в опубликованной заявке на патент США, № публикации 2007/0158385 A1, озаглавленной “Surgical Instrument Having Articulating End Effector,” by Geoffrey C. Hueil et al., которая включается сюда в качестве ссылки.
Рабочий орган 12 включает в себя, в этом примере, среди прочих вещей, канал 22 для скобок и перемещающийся по оси зажимной элемент, такой как опора 24, который поддерживается на некотором расстоянии, которое обеспечивает эффективное скрепление и разрезание ткани, зажатой в рабочем органе 12. Рукоятка 6 включает в себя пистолетную ручку 26, по направлению к которой спусковой механизм 18 смыкания поворачивается по оси врачом, чтобы вызвать зажимание или закрывание опоры 24 по направлению к каналу 22 для скобок рабочего органа 12, чтобы тем самым зажать ткань, расположенную между опорой 24 и каналом 22. Спусковой механизм 20 выстреливания расположен снаружи отдаленно от спускового механизма 18 смыкания. После того как спусковой механизм 18 смыкания блокируется в положении смыкания, как дополнительно описано ниже, спусковой механизм 20 выстреливания может слегка поворачиваться по направлению к пистолетной ручке 26, так что оператор может достать до него используя одну руку. Затем оператор может повернуть по оси спусковой механизм 20 выстреливания по направлению к пистолетной ручке 12, чтобы вызвать скрепление и разрезание зажатой ткани в рабочем органе 12. В других вариантах осуществления могут использоваться различные типы зажимных элементов, кроме опоры 24, таких, например, как противоположная губка, и тому подобное.
Будет понятно, что термины "ближний" и "дальний" используются здесь по отношению к врачу, захватывающему рукоятку 6 инструмента 10. Таким образом, рабочий орган 12 является дальним по отношению к расположенной ближе рукоятке 6. Кроме того, будет понятно, что, для удобства и ясности, пространственные термины такие как "вертикальный" и "горизонтальный" используются здесь по отношению к чертежам. Однако хирургические инструменты используются во многих ориентациях и положениях, и эти термины не предполагаются как ограничивающие и абсолютные.
Спусковой механизм 18 смыкания может приводиться в действие первым. После того как врач удовлетворится расположением рабочего органа 12, врач может опять повернуть спусковой механизм 18 смыкания до его полностью закрытого, заблокированного положения вблизи пистолетной ручки 26. Спусковой механизм 20 выстреливания может приводиться в действие после этого. Спусковой механизм 20 выстреливания возвращается в открытое положение (показанное на Фигурах 1 и 2), когда врач прекращает давление, как описано более полно ниже. Кнопка высвобождения на рукоятке 6, когда на нее нажимают, может высвобождать фиксированный спусковой механизм 18 смыкания. Пусковая кнопка может быть выполнена в различных формах, таких как, например, скользящая пусковая кнопка 160, показанная на Фигуре 7, или любой из механизмов, описанных в опубликованной заявке на патент США, № публикации 2007/01755955 A1, которая включается сюда в качестве ссылки.
Фигура 3 представляет собой покомпонентный вид рабочего органа 12, в соответствии с различными вариантами осуществления. Как показано в иллюстрируемом варианте осуществления, рабочий орган 12 может включать в себя, в дополнение к упомянутому ранее каналу 22 и опоре 24, инструмент 32 для резания, салазки 33, скобочный картридж 34, который находится с возможностью замены в канале 22, и ходовой винт 36. Инструмент 32 для резания может представлять собой, например, нож. Опора 24 может открываться по оси и закрываться в точке поворота 25, соединенной с ближним концом канала 22. Опора 24 также может включать в себя выступ 27 на ее ближнем конце, который вставляется в компонент системы механического смыкания (дополнительно описанной ниже) для открывания и смыкания опоры 24. Когда спусковой механизм 18 смыкания активизируется, то есть, поворачивается пользователем инструмента 10, опора 24 может поворачиваться вокруг точки поворота 25 в зажатое или закрытое положение. Если зажимание с рабочего органа 12 является удовлетворительным, оператор может привести в действие спусковой механизм 20 выстреливания, который, как объясняется более подробно ниже, заставляет нож 32 и салазки 33 перемещаться в продольном направлении вдоль канала 22, при этом разрезаемая ткань зажимается в рабочем органе 12. Перемещение салазок 33 вдоль канала 22 заставляет скобки скобочного картриджа 34 продавливаться через разрезаемую ткань и по направлению к закрытой опоре 24, которая загибает скобки для скрепления разрезанной ткани. В различных вариантах осуществления, салазки 33 могут представлять собой встроенный компонент картриджа 34. Патент США №6978921, озаглавленный “Surgical stapling instrument incorporating E-beam firing mechanism”, который включается сюда в качестве ссылки, дает дополнительные подробности о таких двухтактных инструментах для резания и скрепления. Салазки 33 могут представлять собой часть картриджа 34, так что, когда нож 32 втягивается после операции резания, салазки 33 не втягиваются.
Необходимо отметить, что хотя варианты осуществления инструмента 10, описанные здесь, используют рабочий орган 12, который скрепляет скобками разрезанную ткань, в других вариантах осуществления могут использоваться другие технологии для скрепления или изоляции разрезанной ткани. Например, также могут использоваться рабочие органы, которые используют радиочастотную энергию или адгезивы для скрепления разрезанной ткани. Патент США, №5709680, озаглавленный “Electrosurgical Hemostatic Device”, Yates et al., и патент США №5688270, озаглавленный “Electrosurgical Hemostatic Device with Recessed and/or Offset Electrodes”, Yates et al., которые включаются сюда в качестве ссылок, описывают эндоскопический инструмент для резания, который использует радиочастотную энергию для изоляции разрезанной ткани. Опубликованная заявка на патент США. № публикации 2007/0102453 A1, Jerome R. Morgan, et al. и опубликованная заявка на патент № публикации 2007/0102452 A1, Frederick E. Shelton, IV, et al., которые также включаются сюда в качестве ссылок, описывают эндоскопические инструменты для резания, которые используют адгезивы для скрепления разрезанной ткани. Соответственно, хотя настоящее описание относится далее к операциям резания/скрепления, и тому подобное, нужно заметить, что это является примерным вариантом осуществления и не рассматривается как ограничение. Также могут использоваться и другие технологии скрепления тканей.
Фигуры 4 и 5 представляют собой покомпонентные виды, а Фигура 6 представляет собой вид сбоку рабочего органа 12 и вала 8, в соответствии с различными вариантами осуществления. Как показано в иллюстрируемом варианте осуществления, вал 8 может включать в себя ближнюю закрытую трубку 40 и дальнюю закрытую трубку 42 соединенные по оси с помощью шарнирных связей 44. Дальняя закрытая трубка 42 включает в себя отверстие 45, в которое вставляется выступ 27 опоры 24 для открывания и смыкания опоры 24, как дополнительно описывается ниже. Внутри закрытых трубок 40, 42 может располагаться ближняя сердцевинная трубка 46. Внутри ближней сердцевинной трубки 46 может располагаться главный вращательный (или ближний) приводной вал 48, который сообщается с вторичным (или дальним) приводным валом 50 через сборку 52 конической зубчатой шестерни. Вторичный приводной вал 50 соединяется с приводной шестерней 54, которая зацепляется с ближней приводной шестерней 56 ходового винта 36. Вертикальная коническая шестерня 52b может сидеть и поворачиваться по оси в отверстии 57 на дальнем краю ближней сердцевинной трубки 46. Дальняя сердцевинная трубка 58 может использоваться для заключения в ней вторичного приводного вала 50 и приводных шестерен 54, 56. Совместно, главный приводной вал 48, вторичный приводной вал 50, и узел шарнирного сочленения (например, сборка 52a-c конических шестерен) иногда упоминается здесь как "сборка главного приводного вала".
Подшипник 38, расположенный на дальнем краю канала 22 для скобок, принимает ходовой винт 36, позволяя ходовому винту 36 свободно вращаться по отношению к каналу 22. Ходовой винт 36 может входить в отверстие с резьбой (не показано) ножа 32, так что вращение винта 36 заставляет нож 32 поступательно перемещаться вперед или назад (в зависимости от направления вращения) в канале 22 для скобок. Соответственно, когда главный приводной вал 48 заставляют вращаться посредством приведения в действие спускового механизма 20 выстреливания (как объясняется более подробно ниже), сборка конических шестерен 52a-c заставляет вращаться вторичный приводной вал 50, который, в свою очередь, из-за зацепления приводных шестерен 54, 56, заставляет вращаться ходовой винт 36, что заставляет приводной элемент 32 ножа перемещаться в продольном направлении вдоль канала 22, разрезая любую ткань, зажатую в рабочем органе. Салазки 33 могут изготавливаться, например, из пластика, и могут иметь наклонную дальнюю поверхность. Когда салазки 33 перемещаются по каналу 22, наклонная передняя поверхность может выдавливать или приводить в движение скобки в скобочном картридже через зажатую ткань и к опоре 24. Опора 24 загибает скобки, тем самым, скрепляя скобками разрезанную ткань. Когда нож 32 втягивается, нож 32 и салазки 33 могут расцепляться, при этом оставляя салазки 33 на дальнем краю канала 22.
Фигуры 7-10 иллюстрируют примерный вариант осуществления разрезающего эндоскопического устройства, приводимого в действие двигателем. Иллюстрируемый вариант осуществления обеспечивает обратную связь с пользователем относительно распределения и усилия нагрузки инструмента для резания в рабочем органе. В дополнение к этому, вариант осуществления может использовать энергию, обеспечиваемую пользователем при нажатии на спусковой механизм 20 выстреливания, для питания устройства (так называемый режим “вспомогательной энергии”). Как показано в иллюстрируемом варианте осуществления, рукоятка 6 включает в себя внешние детали 59, 60 нижней стороны и внешние детали 61, 62 верхней стороны, которые соединяются вместе, формируя, в целом, внешнюю часть рукоятки 6. Батарея 64, такая как Li ионная батарея, может предусматриваться в участке пистолетной ручки 26 рукоятки 6. Батарея 64 питает двигатель 65, расположенный в верхнем участке пистолетной ручки 26 рукоятки 6. В соответствии с различными вариантами осуществления, ряд элементов батареи, соединенных последовательно, может использоваться для питания двигателя 65.
Двигатель 65 может представлять собой щеточный приводной двигатель постоянного тока, имеющий максимальную скорость вращения без нагрузки приблизительно 25000 об/мин. Двигатель 64 может приводить в движение 90°-ую сборку 66 конических шестерен, содержащую первую коническую шестерню 68 и вторую коническую шестерню 70. Сборка 66 конических шестерен может приводить в движение сборку 72 планетарного редуктора. Сборка 72 планетарного редуктора может включать в себя ведущую шестерню 74, соединенную с приводным валом 76. Ведущая шестерня 74 может приводить в движение сопряженную коронную шестерню 78, которая приводит в движение барабан 80 косозубой шестерни через приводной вал 82. Кольцо 84 может наворачиваться на барабан 80 косозубой шестерни. Таким образом, когда двигатель 65 вращается, кольцо 84 должно перемещаться вдоль барабана 80 косозубой шестерни посредством расположенной между ними сборки 66 конических шестерен, сборки 72 планетарного редуктора и коронной шестерни 78.
Рукоятка 6 может также включать в себя датчик запуска двигателя 110 в сообщении со спусковым механизмом 20 выстреливания, для обнаружения момента, когда спусковой механизм 20 выстреливания поворачивается (или “закрывается”) в направлении участка пистолетной ручки 26 рукоятки 6 оператором, чтобы тем самым привести в действие операцию резания/скрепления с помощью рабочего органа 12. Датчик 110 может представлять собой пропорциональный датчик, такой, например, как реостат, или переменный резистор. Когда спусковой механизм 20 выстреливания поворачивается, датчик 110 обнаруживает перемещение и посылает электрический сигнал, показывающий, что напряжение (или мощность) должна подаваться на двигатель 65. Когда датчик 110 представляет собой переменный резистор или что-либо подобное, скорость вращения двигателя 65 может быть, в целом, пропорциональной величине перемещения спускового механизма 20 выстреливания. То есть, когда оператор только поворачивает или немного закрывает спусковой механизм 20 выстреливания, скорость вращения двигателя 65 является относительно низкой. Когда спусковой механизм 20 выстреливания полностью повернут (или находится в полностью закрытом положении), скорость вращения двигателя 65 является максимальной. Другими словами, чем сильнее пользователь давит на спусковой механизм 20 выстреливания, тем большее напряжение подается на двигатель 65, вызывая увеличение уровня скорости вращения.
Рукоятка 6 может включать в себя среднюю деталь 104 рукоятки, располагающуюся рядом с верхним участком спускового механизма 20 выстреливания. Рукоятка 6 также может содержать смещающую пружину 112, присоединенную между штифтами на средней детали 104 рукоятки и на спусковом механизме 20 выстреливания. Смещающая пружина 112 может смещать спусковой механизм 20 выстреливания в его полностью открытое положение. Таким образом, когда оператор высвобождает спусковой механизм 20 выстреливания, смещающая пружина 112 будет тянуть спусковой механизм 20 выстреливания в его открытое положение, тем самым устраняя приведение в действие датчика 110, и тем самым прекращая вращение двигателя 65. Кроме того, с помощью этой смещающей пружины 112, каждый раз, когда пользователь закрывает спусковой механизм 20 выстреливания, пользователь будет испытывать сопротивление операции смыкания, тем самым предоставляя пользователю обратную связь относительно величины скорости вращения, прикладываемой двигателем 65. Дополнительно, оператор может прекратить нажимать на спусковой механизм 20 активизации, чтобы тем самым снять усилие с датчика 100, чтобы тем самым остановить двигатель 65. По существу, пользователь может остановить использование рабочего органа 12, тем самым предоставляя оператору меру управления операцией резания/скрепления.
Дальний конец барабана 80 косозубой шестерни включает в себя отдаленный приводной вал 120, который приводит в движение коронную шестерню 122, которая стыкуется с ведущей шестерней 124. Ведущая шестерня 124 соединяется с главным приводным валом 48 сборки главного приводного вала. Таким образом, вращение двигателя 65 заставляет вращаться сборку главного приводного вала, которая приводит в движение рабочий орган 12, как описано выше.
Кольцо 84, навинченное на барабан 80 косозубой шестерни, может включать в себя штифт 86, который располагается внутри посадочного отверстия 88 кулисы 90. Кулиса 90 имеет отверстие 92 на его противоположном конце 94, которое принимает поворотную ось 96, которая присоединена между внешними боковыми деталями 59, 60 рукоятки. Поворотная ось 96 также проходит через отверстие 100 в спусковом механизме 20 выстреливания и отверстие 102 в средней детали 104 рукоятки.
В дополнение к этому, рукоятка 6 может включать в себя датчик 130 реверса двигателя (или ограничения хода) и датчик 142 остановки двигателя (или начала хода). В различных вариантах осуществления, датчик 130 реверса двигателя может представлять собой ограничительный переключатель, расположенный на дальнем конце барабана 80 косозубой шестерни, так что кольцо 84, навинченное на барабан 80 косозубой шестерни соприкасается с датчиком 130 реверса двигателя и отключает его, когда кольцо 84 достигает дальнего конца барабана 80 косозубой шестерни. Датчик 130 реверса двигателя, когда активируется, посылает сигнал двигателю 65 для реверсирования его направления вращения, тем самым уводя нож 32 рабочего органа 12 после операции резания. Датчик 142 остановки двигателя может представлять собой, например, нормально замкнутый ограничительный переключатель. В различных вариантах осуществления, он может располагаться на ближнем конце барабана 80 косозубой шестерни, так что кольцо 84 отключает переключатель 142, когда кольцо 84 достигает ближнего конца барабана 80 косозубой шестерни.
При работе, когда оператор инструмента 10 нажимает на спусковой механизм 20 выстреливания, датчик 110 обнаруживает использование спускового механизма 20 выстреливания и посылает сигнал двигателю 65, вызывая прямое вращение двигателя 65, например, со скоростью, пропорциональной тому, насколько сильно оператор нажимает на спусковой механизм 20 выстреливания. Прямое вращение двигателя 65, в свою очередь, заставляет коронную шестерню 78 на дальнем конце сборки планетарной передачи 72 вращаться, тем самым заставляя вращаться барабан 80 косозубой шестерни, заставляя кольцо 84, навинченное на барабан 80 косозубой шестерни, перемещаться вдаль вдоль барабана 80 косозубой шестерни. Вращение барабана 80 косозубой шестерни также приводит в движение сборку главного приводного вала, как описано выше, который, в свою очередь, вызывает использование ножа 32 в рабочем органе 12. То есть, нож 32 и салазки 33 вынуждены перемещаться вдоль канала 22 в продольном направлении, при этом разрезая ткань, зажатую в рабочем органе 12. Также, операция скрепления скобками рабочего органа 12 должна осуществляться в вариантах осуществления, где используется рабочий орган степлерного типа.
К тому времени, когда заканчивается операция резания/скрепления рабочего органа 12, кольцо 84 на барабане 80 косозубой шестерни должно будет достичь дальнего конца барабана 80 косозубой шестерни, тем самым заставляя датчик 130 реверса двигателя отключиться, он посылает сигнал двигателю 65, чтобы заставить двигатель 65 реверсировать свое вращение. Это, в свою очередь, заставляет нож 32 втягиваться, а также заставляет кольцо 84 на барабане 80 косозубой шестерни перемещаться назад к ближнему концу барабана 80 косозубой шестерни.
Средняя деталь 104 рукоятки включает в себя выступ 106 с задней стороны, который зацепляется с кулисой 90, как лучше всего показано на Фигурах 8 и 9. Средняя деталь 104 рукоятки также имеет стопор 107 движения вперед, который зацепляется со спусковым механизмом 20 выстреливания. Перемещение кулисы 90 управляется, как объясняется выше, вращением двигателя 65. Когда кулиса 90 вращается против часовой стрелки, когда кольцо 84 движется от ближнего конца барабана 80 косозубой шестерни до дальнего конца, средняя деталь 104 рукоятки может свободно вращаться против часовой стрелки. Таким образом, когда пользователь нажимает на спусковой механизм 20 выстреливания, спусковой механизм 20 выстреливания, будет зацепляться со стопором 107 движения вперед в средней детали 104 рукоятки, заставляя среднюю деталь 104 рукоятки вращаться против часовой стрелки. Однако, из-за выступа 106 с задней стороны, зацепляющегося с кулисой 90, средняя деталь 104 рукоятки сможет вращаться против часовой стрелки настолько насколько позволяет кулиса 90. Таким образом, если двигатель 65 должен будет остановить вращение по какой-либо причине, кулиса 90 застопорит вращение и пользователь не сможет больше дополнительно поворачивать спусковой механизм 20 выстреливания, поскольку средняя деталь 104 рукоятки не сможет вращаться против часовой стрелки из-за кулисы 90.
Компоненты примерной системы смыкания для смыкания (или зажимания) опоры 24 рабочего органа 12 посредством отвода спускового механизма 18 смыкания, также показан на Фигурах 7-10. В иллюстрируемом варианте осуществления, система смыкания включает в себя вилку 250, соединенную со спусковым механизмом 18 смыкания с помощью оси 251, которая вставляется через совмещаемые отверстия как в спусковом механизме 18 смыкания, так и в вилке 250. Поворотная ось 252, вокруг которой поворачивается спусковой механизм 18 смыкания, вставляется через другое отверстие в спусковом механизме 18 смыкания, которое расположено в стороне от того, где ось 251 вставляется через спусковой механизм 18 смыкания. Таким образом, отвод спускового механизма 18 смыкания заставляет верхнюю часть спускового механизма 18 смыкания, к которой присоединяется вилка 250 через ось 251, вращаться против часовой стрелки. Дальний конец вилки 250 соединяется через ось 254 с первым закрывающим держателем 256. Первый закрывающий держатель 256 соединяется со вторым закрывающим держателем 258. Коллективно, закрывающие держатели 256, 258 определяют отверстие, в котором сидит и удерживается ближний конец ближней закрытой трубки 40 (смотри Фигуру 4), так что продольное перемещение закрывающих держателей 256, 258 вызывает продольное движение ближней закрытой трубки 40. Инструмент 10 также включает в себя закрытый стержень 260, расположенный внутри ближней закрытой трубки 40. Закрытый стержень 260 может включать в себя окно 261, в котором на одной из внешних деталей рукоятки, такой как внешняя нижняя боковая деталь 59 в иллюстрируемом варианте осуществления, располагается штифт 263, чтобы фиксировано соединять закрытый стержень 260 с рукояткой 6. Таким образом, ближняя закрытая трубка 40 способна перемещаться в продольном направлении по отношению к закрытому стержню 260. Закрытый стержень 260 может также включать в себя дальний фланец 267, который помещается в полости 269 в ближней сердцевинной трубке 46 и удерживается там с помощью колпачка 271 (смотри Фигуру 4).
При работе, когда вилка 250 вращается из-за отвода спускового механизма 18 смыкания, закрытые держатели 256, 258 заставляют ближнюю закрытую трубку 40 перемещаться вдаль (то есть, от конца, рукоятки инструмента 10), что заставляет дальнюю закрытую трубку 42 перемещаться вдаль, что заставляет опору 24 вращаться вокруг точки вращения 25 в зажатом или закрытом положении. Когда спусковой механизм 18 смыкания разблокируется из блокированного положения, ближняя закрытая трубка 40 должна приближаясь скользить, что заставляет дальнюю закрытую трубку 42 приближаясь скользить, что, посредством выступа 27, который вставляется в окно 45 дальней закрытой трубки 42, заставляет опору 24 поворачиваться вокруг точки вращения 25 в открытое или незажатое положение. Таким образом, посредством отвода и блокирования спускового механизма 18 смыкания, оператор может зажимать ткань между опорой 24 и каналом 22 и может отпускать ткань после операции резания/скрепления посредством разблокирования спускового механизма 20 смыкания из заблокированного положения.
Фигура 11 представляет собой принципиальную схему электрической схемы инструмента 10 в соответствии с различными вариантами осуществления настоящего изобретения. Когда оператор сначала нажимает на спусковой механизм 20 выстреливания после блокирования спускового механизма 18 смыкания, датчик 110 активируется, позволяя току протекать через него. Если нормально разомкнутый переключатель 130 датчика реверса двигателя открыт (означая, что окончание хода рабочего органа не достигнуто), ток будет протекать в однополюсное двуходовое реле 132. Поскольку переключатель 130 датчика реверса двигателя не замкнут, дроссель 134 реле 132 не снабжается энергией, так что реле 132 будет находиться в своем обесточенном состоянии. Схема также содержит датчик 136 блокировки картриджа. Если рабочий орган 12 включает в себя скобочный картридж 34, датчик 136 будет находиться в замкнутом состоянии, делая возможным протекание тока. В другом случае, если рабочий орган 12 не включает в себя скобочный картридж 34, датчик 136 будет разомкнут, тем самым предотвращая питание двигателя 65 с помощью батареи 64.
Когда скобочный картридж 34 присутствует, датчик 136 замкнут, что запитывает однополюсное одноходовое реле 138. Когда реле 138 запитывается, ток протекает через реле 136, через датчик 110 с переменным резистором и к двигателю 65 через двухполюсное двуходовое реле 140, тем самым, запитывая двигатель 65 и позволяя ему вращаться в прямом направлении. Когда рабочий орган 12 достигает окончания своего хода, датчик 130 реверса двигателя будет активироваться, тем самым, замыкая переключатель 130 и запитывая реле 134. Это заставляет реле 134 принять свое запитываемое состояние (не показано на Фигуре 13), что заставляет ток обходить датчик 136 блокировки картриджа и датчик 110 с переменным резистором, и вместо этого, заставляет ток протекать как в нормально замкнутое двухполюсное двуходовое реле 142, так и обратно к двигателю 65, но, таким образом, через реле 140, что заставляет двигателю 65 реверсировать направление своего вращения. Поскольку переключатель датчика 142 остановки двигателя нормально замкнут, ток будет протекать обратно в реле 134, чтобы поддерживать его замкнутым до тех пор, пока переключатель 142 не разомкнется. Когда нож 32 полностью втянут, переключатель 142 датчика остановки двигателя активируется, заставляя переключатель 142 размыкаться, тем самым, снимая мощность с двигателя 65.
В других вариантах осуществления, вместо датчика пропорционального типа 110 может использоваться датчик релейного типа. В таких вариантах осуществления, величина скорости вращения двигателя 65 не должна быть пропорциональна усилию, прикладываемому оператором. Вместо этого двигатель 65 должен вращаться, в целом, с постоянной величиной скорости. Но оператор должен по-прежнему испытывать силовую обратную связь, поскольку спусковой механизм 20 выстреливания находится в зацеплении в цепи зубчатых передач привода.
Дополнительные конфигурации для моторизованных хирургических инструментов описаны в опубликованной заявке на патент США, № публикации 2007/0175962 A1, озаглавленной “Motor-driven surgical cutting and fastening instrument with tactile position feedback”, которая включается сюда в качестве ссылки.
В моторизованном хирургическом инструменте, таком как моторизованные эндоскопические инструменты, описанные выше, или в моторизованном дисковом разрезающем инструменте, двигатель может питаться с помощью ряда элементов батареи, соединенных последовательно. Кроме того, может быть желательным в определенных обстоятельствах питать двигатель с помощью некоторой части от общего количества элементов батареи. Например, как показано на Фигуре 12, двигатель 65 может питаться с помощью блока питания 299, содержащего шесть (6) элементов батареи, соединенных последовательно. Элементы 310 батареи могут представлять собой, например, 3-вольтовые литиевые элементы батареи, такие как элементы батареи CR 123A, хотя в других вариантах осуществления, могут использоваться другие типы элементов батареи (включая элементы батареи с различными уровнями напряжения и/или различными химическими составами). Если шесть 3-вольтовых элементов 310 батареи соединяются последовательно для питания двигателя 65, общее напряжение, доступное для питания двигателя 65, должно составлять 18 вольт. Элементы 310 батареи могут содержать перезаряжаемые или неперезаряжаемые элементы батареи.
В таком варианте осуществления, при самых тяжелых нагрузках, входное напряжение для двигателя 65 может постепенно опускаться примерно до девяти-десяти вольт. При этих рабочих условиях, блок питания 299 доставляет максимальную мощность для двигателя 65. Соответственно, как показано на Фигуре 12, схема может включать в себя переключатель 312, который может выборочно давать возможность двигателю 65 питаться с помощью либо (1) всех элементов 310 батареи, либо (2) некоторой части элементов 310 батареи. Как показано на Фигуре 12, с помощью соответствующего выбора, переключатель 312 может давать возможность двигателю 65 питаться с помощью всех шести элементов батареи или только четырех элементов батареи. Таким образом, переключатель 312 может использоваться для питания двигателя 65 с помощью либо 18 вольт (при использовании всех шести элементов 310 батареи), либо 12 вольт (например, с использованием четырех из шести элементов батареи). В различных вариантах осуществления, конструкционный выбор количества элементов батареи в той части, которая используется для питания двигателя 65, может основываться на напряжении, требуемом для двигателя 65, когда он работает с максимальным выходной мощностью при самых тяжелых нагрузках.
Переключатель 312 может представлять собой, например, электромеханический переключатель, такой как микропереключатель. В других вариантах осуществления, переключатель 312 может быть выполнен с помощью твердотельного переключателя, такого как транзистор. Второй переключатель 314, такой как нажимной кнопочный переключатель, может использоваться для контроля того, прикладывается ли вообще мощность к двигателю 65. Также, переключатель 316 прямого/обратного вращения может использоваться для контроля того, вращается ли двигатель 65 в прямом направлении или в обратном направлении. Переключатель 316 прямого/обратного вращения может быть выполнен с помощью двухполюсного двухходового переключателя, такого как реле 140, показанное на Фигуре 11.
При работе, пользователь инструмента 10 может выбирать желаемый уровень мощности посредством использования некоего вида управления с помощью переключателя, такого как переключатель, зависимый от положения (не показан), такого как тумблерный переключатель, механический рычажной переключатель или кулачок, который контролирует положение переключателя 312. Затем пользователь может активировать второй переключатель 314 для соединения выбранных элементов 310 батареи с двигателем 65. В дополнение к этому, схема, показанная на Фигуре 12, может использоваться для питания двигателя других типов моторизованных хирургических инструментов, таких как дисковые режущие и/или лапароскопические инструменты. Дополнительные детали относительно дисковых режущих инструментов можно найти в опубликованных заявках на патент США, № публикации 2006/0047307 A1 и № публикации 2007/0262116 A1, которые включаются сюда в качестве ссылок.
В других вариантах осуществления, как показано на Фигуре 13, первичный источник питания 340, такой как элемент батареи, такой как элемент батареи CR2 или CR123A, может использоваться для зарядки некоторого количества вторичных аккумуляторных устройств 342. Первичный источник питания 340 может содержать один или несколько последовательно соединенных элементов батареи, которые предпочтительно являются заменяемыми в иллюстрируемом варианте осуществления. Вторичные аккумуляторные устройства 342 могут содержать, например, перезаряжаемые элементы батареи и/или суперконденсаторы (также известные как "ультраконденсаторы" или "электрохимические двухслойные конденсаторы" (EDLC)). Суперконденсаторы представляют собой электрохимические конденсаторы, которые имеют необычно высокую плотность энергии, по сравнению с обычными электролитическими конденсаторами, как правило, в несколько тысяч раз больше, чем электролитический конденсатор большой емкости.
Первичный источник питания 340 может заряжать вторичные аккумуляторные устройства 342. После достаточной зарядки, первичный источник питания 340 может удаляться и вторичные аккумуляторные устройства 342 могут использоваться для питания двигателя 65 во время процедуры или операции. Аккумуляторные устройства 342 могут отнимать примерно пятнадцать-тридцать минут для зарядки при различных обстоятельствах. Суперконденсаторы имеют ту характеристику, они могут заряжаться и разряжаться исключительно быстро по сравнению с обычными батареями. В дополнение к этому, в то время как батареи хороши только в течение ограниченного количества циклов зарядки/разрядки, суперконденсаторы часто могут заряжаться/разряжаться многократно, иногда в течение десятков миллионов циклов. Для вариантов осуществления, использующих суперконденсаторы в качестве вторичных аккумуляторных устройств 342, суперконденсаторы могут содержать углеродные нанотрубки, проводящие полимеры (например, полиацены) или углеродные аэрогели.
Как показано на Фигуре 14, схема 344 управления зарядкой может использоваться для определения того момента, когда вторичные аккумуляторные устройства 342 достаточно заряжены. Схема 344 управления зарядкой может включать в себя индикатор, такой как один или несколько светодиодов, ЖК дисплей, и тому подобное, которые активируются для извещения пользователя инструмента 10, когда вторичные аккумуляторные устройства 342 достаточно заряжены.
Первичный источник питания 340, вторичные аккумуляторные устройства 342 и схема 344 управления зарядкой могут представлять собой часть блока питания в участке 26 пистолетной ручки рукоятки 6 инструмента 10 или в другой части инструмента 10. Блок питания может отсоединяться от участка 26 пистолетной ручки, в этом случае, когда инструмент 10 должен использоваться для хирургии, блок питания может асептически вставляться в участок 26 пистолетной ручки (или в другое положение в инструменте в соответствии с другими вариантами осуществления), например, с помощью операционной медсестры, ассистирующей при хирургической операции. После вставки блока питания, медсестра может вставлять заменяемый первичный источник питания 340 в блок питания для зарядки вторичных аккумуляторных устройств 342 за определенное время до использования инструмента 10, например, за тридцать минут. Когда вторичные аккумуляторные устройства 342 заряжаются, схема 344 управления зарядкой может показывать, что блок питания готов к использованию. В этот момент, заменяемый первичный источник питания 340 может быть удален. Во время операции, пользователь инструмента 10 может затем активизировать двигатель 65, например, посредством активирования переключателя 314, при этом вторичные аккумуляторные устройства 342 питают двигатель 65. Таким образом, вместо того, чтобы иметь ряд однократно используемых батарей для питания двигателя 65, в таком варианте осуществления может использоваться одна однократно используемая батарея (в качестве первичного источника питания 340) и вторичные аккумуляторные устройства 342 могут быть многократно используемыми. В альтернативных вариантах осуществления, однако, нужно отметить, что вторичные аккумуляторные устройства 342 могут быть и не перезаряжаемыми и/или не многократно используемыми. Вторичные аккумуляторы 342 могут использоваться с помощью переключателя 312 выбора элемента, описанного выше в связи с Фигурой 12.
Схема 344 управления зарядкой может также включать в себя индикаторы (например, светодиоды или ЖК дисплей), которые показывают, насколько большой заряд остается во вторичных аккумуляторных устройствах 342. Таким образом, хирург (или другой пользователь инструмента 10) может увидеть, какой заряд остается в ходе процедуры, в которой используется инструмент 10.
Схема 344 управления зарядкой, как показано на Фигуре 15, может содержать измеритель 345 заряда для измерения заряда на вторичных аккумуляторах 342. Схема 344 управления зарядкой также может содержать энергонезависимую память 346, такую как флэш-память или постоянное запоминающее устройство, и один или несколько процессоров 348. Процессор (процессоры) 348 может соединяться с памятью 346 для управления памятью. В дополнение к этому, процессор (процессоры) 348 может соединяться с измерителем заряда 345 для считывания данных и управления иным образом измерителем заряда 345. В дополнение к этому, процессор (процессоры) 348 может управлять светодиодами или другими выходными устройствами схемы 344 управления зарядкой. Процессор (процессоры) 348 может хранить параметры инструмента 10 в памяти 346. Параметры могут включать в себя рабочие параметры инструмента, которые воспринимаются различными датчиками, которые могут устанавливаться или использоваться в инструменте 10, например, количество выстреливаний, уровни прикладываемых усилий, размер зазора при сжатии между противоположными губками рабочего органа 12, величина отклонения, и тому подобное. В дополнение к этому, параметры, хранимые в памяти 346, могут содержать идентификационные значения для различных компонентов инструмента 10, которые может считывать и хранить схема 344 управления зарядкой. Компоненты, имеющие такие идентификационные параметры, могут представлять собой заменяемые компоненты, такие как скобочный картридж 34. Эти идентификационные параметры могут представлять собой, например, RFID (радиочастотную идентификацию), которые схема 344 управления зарядкой считывает с помощью ретранслятора 350 RFID. Ретранслятор 350 RFID может считывать значения RFID с компонентов инструмента, таких как скобочный картридж 34, которые включают в себя метки RFID. Значения идентификационных параметров могут считываться, храниться в памяти 346 и сравниваться с помощью процессора 348 со списком приемлемых значений идентификационных параметров, хранимых в памяти 346 или в другой памяти, связанной со схемой управления зарядкой, для определения того, например, является ли удаляемый/заменяемый компонент, связанный со считываемым значением идентификационных параметров, аутентичным и/или соответствующим. В соответствии с различными вариантами осуществления, если процессор 348 определяет, что съемный/заменяемый компонент, связанный со считываемым значением идентификационных параметров, не является аутентичным, схема 344 управления зарядкой может предотвратить использование блока питания инструментом 10, например, посредством размыкания переключателя (не показан), который предотвращал бы подвод питания от блока питания к двигателю 65. В соответствии с различными вариантами осуществления, разнообразные параметры, которые может оценивать процессор 348 для определения того, является ли компонент аутентичным и/или соответствующим, включают в себя: код даты; модель/тип компонента; производителя; региональную информацию и коды предыдущих ошибок.
Схема 344 управления зарядкой может также содержать интерфейс 352 ввода-вывода для сообщения с другим устройством, таким, как описано ниже. Таким образом, параметры, хранимые в памяти 346, могут загружаться в другое устройство. Интерфейс 352 ввода-вывода может представлять собой, например, проводной или беспроводной интерфейс.
Как рассмотрено выше, блок питания может содержать вторичные аккумуляторы 342, схему 344 управления зарядкой и/или переключатель 316 прямого-обратного хода. В соответствии с различными вариантами осуществления, как показано на Фигуре 16, блок питания 299 может соединяться с базовым устройством 362 зарядки, которое может, среди прочего, заряжать вторичные аккумуляторы 342 в блоке питания. Базовое устройство 362 зарядки может соединяться с блоком питания 299 посредством асептического соединения базового устройства 362 зарядки к блоку питания 299 в то время, когда блок питания установлен в инструменте 10. В других вариантах осуществления, где блок питания является съемным, базовое устройство 362 зарядки может соединяться с блоком питания 299 посредством снятия блока питания 299 из инструмента 10 и присоединения его к базовому устройству 362 зарядки. Для таких вариантов осуществления, после того как базовое устройство 362 зарядки достаточно зарядит вторичные аккумуляторы 342, блок питания 299 может асептически устанавливаться в инструменте 10.
Как показано на Фигуре 16, базовое устройство 362 зарядки может содержать источник питания 364 для зарядки вторичных аккумуляторов 342. Источник питания 364 базового устройства 362 зарядки может представлять собой, например, батарею (или ряд последовательно соединенных батарей), или преобразователь переменный ток/постоянный ток, который преобразует энергию переменного тока, например, от бытовой электрической сети, в постоянный ток, или любой другой источник питания пригодный для зарядки вторичных аккумуляторов 342. Базовое устройство 362 зарядки может также содержать индикаторные устройства, такие как светодиоды, ЖК дисплей, и тому подобное, чтобы показывать состояние зарядки вторичных аккумуляторов 342.
В дополнение к этому, как показано на Фигуре 16, базовое устройство 362 зарядки может содержать один или несколько процессоров 366, один или несколько блоков 368 памяти и интерфейсов 370, 372 ввода-вывода. Через первый интерфейс 370 ввода-вывода, базовое устройство 362 зарядки может сообщаться с блоком питания 299 (через интерфейс ввода-вывода блока питания 352). Таким образом, например, данные, хранимые в памяти 346 блока питания 299, могут загружаться в память 368 базового устройства 362 зарядки. Таким образом, процессор 366 может оценивать значения идентификационных параметров для съемных/заменяемых компонентов, загруженных из схемы 344 управления зарядкой, для определения аутентичности и пригодности компонентов. Рабочие параметры, загруженные из схемы 344 управления зарядкой, могут также храниться в памяти 368, а затем могут загружаться в другое компьютерное устройство через второй интерфейс 372 ввода-вывода для оценки и анализа, например, с помощью больничной системы, в которой осуществляется операция с использованием инструмента 10, офиса хирурга, продавца инструмента, производителя инструмента, и тому подобное.
Базовое устройство 362 зарядки может также содержать измеритель 374 заряда для измерения заряда во вторичных аккумуляторах 342. Измеритель 374 заряда может находиться в сообщении с процессором (процессорами) 366, так что процессор (процессоры) 366 может определять в реальном времени пригодность блока питания 299 для использования, для обеспечения высоких рабочих характеристик.
В другом варианте осуществления, как показано на Фигуре 17, схема батарей может содержать регулятор 320 мощности для управления мощностью, подаваемой энергосберегающими устройствами 310 двигателю 65. Регулятор 320 мощности может также составлять часть блока питания 299, или он может представлять собой отдельный компонент. Как рассмотрено выше, двигатель 65 может представлять собой щеточный двигатель постоянного тока. Скорость щеточных двигателей постоянного тока, как правило, пропорциональна приложенному входному напряжению. Регулятор 320 мощности может обеспечить хорошо регулируемое выходное напряжение для двигателя 65, так что двигатель 65 будет работать при постоянной (или по существу постоянной) скорости. В соответствии с различными вариантами осуществления, регулятор 320 мощности может содержать преобразователь мощности, работающий в режиме переключения, такой как промежуточный вольтодобавочный преобразователь, как показано в примере на Фигуре 17. Такой промежуточный вольтодобавочный преобразователь 320 может содержать переключатель 322 мощности, такой как полевой транзистор, выпрямитель 32, дроссель 326 и конденсатор 328. Когда переключатель 322 мощности включен, вход источника напряжения (например, источников питания 310) непосредственно соединен с дросселем 326, который сохраняет энергию в этом состоянии. В этом состоянии, конденсатор 328 подает энергию на выходную нагрузку (например, двигатель 65). Когда переключатель 320 мощности находится в выключенном состоянии, дроссель 326 соединяется с выходной нагрузкой (например, двигателем 65) и конденсатором 328, так что энергия переносится от дросселя 326 к конденсатору 328 и нагрузке 65. Схема 330 управления может управлять переключателем 322 мощности. Схема 330 управления может использовать цифровые и/или аналоговые контуры управления. В дополнение к этому, в других вариантах осуществления, схема 330 управления может принимать информацию управления от главного контроллера (не показан) через коммуникационную связь, такую как последовательную или параллельную шину цифровых данных. Уставка напряжения для выхода регулятора 320 мощности может устанавливаться, например, на половине от напряжения разомкнутой цепи, в этой точке является доступной максимальная мощность, доступная от источника.
В других вариантах осуществления, могут использоваться различные топологии преобразователей мощности, включая линейные преобразователи мощности или преобразователи мощности, работающие в режиме переключения. Другие топологии режима переключения, которые могут использоваться, включают в себя обратноходовой преобразователь, прямоходовой преобразователь, понижающий преобразователь, повышающий преобразователь и SEPIC (преобразователь с несимметрично нагруженной первичной индуктивностью). Уставка напряжения для регулятора 320 мощности может изменяться в зависимости от того, сколько элементов батарей используется для питания двигателя 65. В дополнение к этому, регулятор 320 мощности может использоваться вместе с вторичными аккумуляторными устройствами 342, как показано на Фигуре 13. Кроме того, переключатель 316 прямого-обратного вращения может встраиваться в регулятор 320 мощности, хотя он показан отдельно на Фигуре 17.
Батареи могут обычно моделироваться как идеальный источник напряжения и сопротивление источника. Для идеальной модели, когда сопротивления источника и нагрузки согласованы, в нагрузку передается максимальная мощность. Фигура 18 показывает типичную кривую мощности для батареи. Когда схема батареи разомкнута, напряжение на батарее высоко (при его значении для разомкнутой схемы) и ток, получаемый из батареи, равен нулю. Мощность, получаемая от батареи, также равна нулю. Когда из батареи получают больший ток, напряжение на батареи понижается. Мощность, получаемая от батареи, представляет собой произведение тока и напряжения. Мощность достигает пика вблизи уровня напряжения, который меньше, чем напряжение разомкнутой цепи. Как показано на Фигуре 18, для большинства химических батарей имеется резкое падение напряжения/мощности при высоком токе, из-за химии или положительного температурного коэффициента (PTC), или из-за устройства для защиты батареи.
В частности, для вариантов осуществления, использующих батарею (или батареи) для питания двигателя 65 во время процедуры, схема 330 управления может отслеживать выходное напряжение и регулировать уставки регулятора 320, так что батарея работает на “левой” стороне кривой мощности, когда мощность возрастает. Если батарея достигает пикового уровня мощности, схема 330 управления может изменить (например, понизить) уставки регулятора, так что от батареи потребуется меньшая общая мощность. Двигатель 65 должен замедлиться. Таким образом, потребность для блока питания редко когда превосходит пиковую доступную мощность, если вообще превосходит, так что ситуация недостаточной мощности во время процедуры может быть исключена.
В дополнение к этому, в соответствии с другими вариантами осуществления, мощность, получаемая от батареи, может оптимизироваться таким образом, что для химических реакций в элементах батареи имелось бы время для восстановления, чтобы тем самым оптимизировать ток и мощность, доступные от батареи. В импульсных нагрузках, батареи, как правило, обеспечивают более высокую мощность при начале импульса, чем ближе к концу импульса. Это связано с несколькими факторами, включая: (1) PTC может изменить ее сопротивление во время импульса; (2) температура батареи может изменяться и (3) скорость электрохимической реакции изменяется из-за того, что электролит на катоде истощается, и скорость диффузии свежего электролита ограничивает скорость реакции. В соответствии с различными вариантами осуществления, схема 330 управления может управлять преобразователем 320, так что он получает меньший ток от батареи, чтобы дать батареи возможность для восстановления перед следующим импульсом.
В соответствии с другими вариантами осуществления, инструмент 10 может содержать устройство для ограничения крутящего момента зажимного типа. Устройство для ограничения крутящего момента зажимного типа может располагаться, например, между двигателем 65 и конической шестерней 68, между конической шестерней 70 и сборкой планетарного редуктора 72, или на выходном валу сборки планетарного редуктора 72. В соответствии с различными вариантами осуществления, устройство для ограничения крутящего момента может использовать муфту на основе электромагнита или постоянного магнита.
Фигуры 19-22 показывают примерную электромагнитную муфту 400, которая может использоваться в инструменте 10, в соответствии с различными вариантами осуществления. Муфта 400 может содержать статор 402 в форме подковы, имеющий магнитные диски 404, 406 на каждом конце. Первый диск 404 может соединяться с перемещаемой в аксиальном направлении, вращающейся деталью 408 полюса, такой как выходной полюс двигателя 65. Второй магнитный диск 406 может соединяться с аксиально неподвижной, вращающейся деталью 410 полюса, такой как входной полюс для коробки передач инструмента 10. На видах Фигур 19 и 20, первая деталь 408 полюса аксиально отделена от второй детали 410 полюса зазором 412, так что магнитные диски 404, 406 не зацепляются. Проволочная катушка (не показана), которая может быть намотана вокруг статора 402, может использоваться для создания электромагнитного потока, необходимого для приведения в действие муфты 400. Когда катушка проводит электрический ток, результирующий магнитный поток может заставить два магнитных диска 404, 406 притягиваться, вызывая аксиальное движение первой детали 408 полюса по направлению ко второй детали 410 полюса, тем самым заставляя два магнитных диска 404, 406 войти в зацепление, как показано на Фигурах 21 и 22, так что две детали 408, 410 полюсов будут вращаться вместе, пока крутящий момент превышает момент трения, создаваемый между лицевыми сторонами магнитных дисков 404 и 406.
Сила притяжения между двумя дисками 404, 406 и соответствующая способность к созданию момента муфты 400 может управляться посредством управления диаметром дисков 404, 406, коэффициентом трения между вступающими в контакт лицевыми сторонами магнитных дисков 404 и 406 и посредством использования магнитных материалов для дисков 404, 406, которые насыщаются при известной и контролируемой плотности потока. По этой причине, даже если имеются рабочие условия, когда больший ток проходит через катушку, магнитный материал дисков 404, 406 не будет создавать более высокую силу притяжения и соответствующий ограничивающий момент.
Использование такой муфты имеет множество дополнительных потенциальных преимуществ. Поскольку она управляется электрически, муфта 400 может быстро дезактивироваться посредством снятия тока с провода, для ограничения количества тепла, создаваемого в муфте 400 и в двигателе 65. Посредством отсоединения двигателя от остальной цепи привода, через муфту 400, большая часть сохраняемой энергии инерции цепи привода может отсоединяться, ограничивая толчок, если выход должен блокироваться внезапно. В дополнение к этому, поскольку он управляется электрически, конструкционно может предусматриваться некоторое ограниченное проскальзывание, чтобы помочь в ограничении толчка при повторном запуске цепи привода под нагрузкой. Кроме того, поскольку свойства магнитного насыщения одного или нескольких компонентов (например, магнитных дисков 404, 406) в муфте могут использоваться для управления ограничением крутящего момента вместо тока в катушке, муфта 400 должна быть менее чувствительна к изменениям в напряжении системы. Ограничение момента в таких вариантах осуществления должно представлять собой, прежде всего функцию физических размеров компонентов муфты (например, магнитных дисков 404, 406) и не должно требовать регуляторов напряжения или других внешних компонентов для правильной работы.
В другом варианте осуществления, вместо использования электромагнитной муфты, устройство для ограничения крутящего момента может содержать постоянный магнит (не показан). Постоянный магнит может соединяться, например, с первой, перемещаемой в аксиальном направлении деталью 408 полюса, и притягивать аксиально фиксированную вторую деталь 410 полюса, или наоборот. В таких вариантах осуществления, один из дисков 404, 406 может изготавливаться из постоянного магнита, а другой - из магнитного материала, подобного железу. С малыми изменениями, статор 402 может быть изготовлен в форме постоянного магнита, заставляя магнитные диски 404 и 406 притягиваться друг к другу. Из-за постоянного магнита, два диска 404, 406 должны быть зацеплены всегда. Использование постоянного магнита не может обеспечить точного управления крутящим моментом как конфигурация электромагнитной муфты, описанная выше, но оно может иметь преимущества: (1) не требуется управления или управляющей логики для управления током через катушку; (2) более компактно, чем конфигурация электромагнитной муфты; и (3) упрощает конструкцию инструмента 10.
Как рассмотрено ранее, рабочий орган 12 может испускать радиочастотную энергию для коагуляции ткани, зажатой в рабочем органе. Радиочастотная энергия может передаваться между электродами в рабочем органе 12. Радиочастотный источник (не показан), содержащий, например, генератор и усилитель, среди других компонентов, которые могут подавать радиочастотную энергию на электрод, может размещаться в самом инструменте, например, в рукоятке 6 беспроводного инструмента 10, или радиочастотный источник может быть внешним по отношению к инструменту 10. Радиочастотный источник может активизироваться, как дополнительно описано ниже.
В соответствии с различными вариантами осуществления, рабочий орган 12 может содержать множество секций (или сегментов) электродов. Например, как показано в примере Фигуры 23, нижняя поверхность опоры 24 (то есть, поверхность, расположенная напротив скобочного картриджа 34) может содержать три коллинеарных радиочастотных сегмента. В этом примере, каждый сегмент имеет одинаковую длину (например, 20 мм), хотя в других вариантах осуществления могут иметься большие или меньшие количества сегментов и сегменты могут иметь различную длину. В примере Фигуры 23, имеется три пары активных или “анодных” выводов или электродов 500, расположенных в продольном направлении вдоль каждой стороны по длине канала на нижней поверхности опоры 24. В частности, в иллюстрируемом варианте осуществления имеется пара дальних электродов 5001, пара средних электродов 5002 и пара ближних электродов 5003 на каждой стороне канала 516 для ножа. Металлическая наружный участок или канал 22 рабочего органа 12 или металлическая опора 24 может служить в качестве противоэлектрода (или катода) для каждого из трех верхних активных электродов 500 (или анодов). Верхние электроды 500 могут соединяться с радиочастотным источником. Когда он запитывается, радиочастотная энергия может распространяться между верхними электродами 500 и противоэлектродом, коагулируя ткань, зажатую между электродами.
Электроды 500 могут запитываться одновременно или в различном порядке, например, последовательно. Для тех вариантов осуществления, где электроды 500 запитываются в соответствии с определенной последовательностью, последовательность может устанавливаться автоматически (управляться, например, с помощью контроллера (не показан) в сообщении с радиочастотным источником) или по выбору пользователя. Например, сначала могут запитываться ближние электроды 5003; затем средние электроды 5002; затем дальние электроды 5001. Таким образом, оператор (например, оперирующий хирург) может выборочно коагулировать области линии скобок. Электроды в таком варианте осуществления могут управляться с помощью мультиплексора и/или генератора с множеством выходов, как дополнительно описано ниже. Таким образом, ткань под каждым электродом 500 может обрабатываться индивидуально в соответствии с потребностями коагуляции. Каждый электрод в паре может присоединяться к радиочастотному источнику, так что они запитываются одновременно. То есть, дальняя пара активных электродов 5001, каждый из которых находится на противоположных сторонах канала для ножа, может запитываться с помощью радиочастотного источника одновременно. То же самое и для средней пары электродов 5002 и ближней пары электродов 5003, хотя, в варианте осуществления, где пары электродов запитываются последовательно, дальняя пара не запитывается одновременно со средней и ближней парой, и так далее.
Кроме того, могут отслеживаться различные электрические параметры, такие как импеданс, подводимая мощность или энергия, и тому подобное, и выходная мощность конкретных электродов 500 может меняться для получения наиболее желательного воздействия на ткани. В дополнение к этому, другое преимущество очевидно в случае, когда металлическая скобка или другой электропроводящий объект, который может вызывать короткое замыкание электродов, остается от предыдущего выстреливания инструмента или хирургической процедуры. Такая ситуация короткого замыкания может обнаруживаться генератором и/или мультиплексором, и энергия может модулироваться способом, соответствующим короткому замыканию цепи.
В дополнение к этому, последовательное запитывание электродов 500 уменьшает мгновенную мощность, необходимую для радиочастотного источника, по сравнению с конструкцией, которая имела бы один набор электродов, настолько же длинных, как и общая длина трех сегментированных электродов 500, показанных на Фигуре 23. Например, для конфигурации электродов, как показано в 'Патенте 312', продемонстрировано, что потребовалось бы от пятидесяти до сотни ватт для успешного коагулирования линий длиной сорок пять миллиметров на каждой стороне линии разреза. При использовании меньших активных электродов (например, верхних электродов 500), которые имеют меньшую площадь поверхности, чем обратные электроды больших размеров (например, металлическая опора 24), активные электроды 500 меньших размеров могут концентрировать терапевтическую энергию на ткани, в то время как обратный электрод больших размеров используется для замыкания цепи при минимальном воздействии на границе раздела с тканью. В дополнение к этому, обратный электрод предпочтительно имеет большую массу и по этой причине может оставаться холодным во время электрохирургического применения.
Электроды 500 могут быть окружены электрически изолирующим материалом 504, который может содержать керамический материал.
Фигура 24 показывает другой вариант осуществления, имеющий сегментированные радиочастотные электроды. В варианте осуществления, показанном на Фигуре 24, имеется четыре коллинеарных сегментированных электрода 5001-4 равной длины (15 мм, в этом примере). Подобно варианту осуществления на Фигуре 23, электроды 500 на Фигуре 24 могут запитываться одновременно или последовательно.
Фигура 25 показывает еще один вариант осуществления, в котором сегментированные электроды имеют различную длину. В иллюстрируемом варианте осуществления, имеется четыре коллинеарных сегментированных электрода, но самые дальние электроды 5001, 5002 имеют длину 10 мм, а два ближних электрода 5003, 5004 имеют длину 20 мм. Наличие коротких дальних электродов может обеспечить преимущество концентрирования терапевтической энергии, как рассмотрено выше.
Фигура 59 показывает вариант осуществления, имеющий пятнадцать пар сегментированных радиочастотных электродов 500 на печатной плате 570 или на другом типе соответствующей подложки, на нижней поверхности опоры 24 (то есть, на поверхности, расположенной напротив канала 22). Различные пары электродов запитываются с помощью радиочастотного источника 574 (или генератора). Мультиплексор 576 может распределять радиочастотную энергию к различным парам электродов по желанию под управлением контроллера 578. В соответствии с различными вариантами осуществления, радиочастотный источник 574, мультиплексор 576 и контроллер 578 могут располагаться в рукоятке 6 инструмента.
В таком варианте осуществления, печатная плата 570 может содержать множество слоев, которые обеспечивают электрические соединения между мультиплексором 576 и различными парами электродов. Например, как показано на Фигурах 60-63, печатная плата может содержать три слоя 5801-3, каждый слой 580 обеспечивает соединения с пятью парами электродов. Например, самый верхний слой 5803 может обеспечивать соединения с самыми ближними пятью парами электродов, как показано на Фигурах 60 и 61; средний слой 5802 может обеспечивать соединения со средними пятью парами электродов, как показано на Фигурах 60 и 62; и самый нижний слой 5801 может обеспечивать соединения с самыми дальними пятью парами электродов, как показано на Фигурах 60 и 63.
Фигура 64 показывает вид с торца в поперечном разрезе опоры 24, в соответствии с таким вариантом осуществления. Печатная плата 570, находящаяся рядом с карманами 584 для скобок, содержит три проводящих слоя 5801-3, имеющих изолирующие слои 5821-4 между ними. Фигуры 65 и 66 показывают, как различные слои 5801-3 могут укладываться для соединения с мультиплексором 576 в рукоятке.
Преимущество наличия такого большего количества радиочастотных электродов в рабочем органе 12, как показано на Фигуре 67, заключается в том, что в случае, если линия 590 металлических скобок или другой электропроводящий объект остается в ткани 592 от предыдущего выстреливания инструмента или хирургической процедуры, и он может вызывать короткое замыкание электродов, то такая ситуация короткого замыкания может обнаруживаться генератором и мультиплексором, и энергия может модулироваться способом, соответствующим короткому замыканию цепи.
Фигура 27 показывает другой рабочий орган 12 с радиочастотными электродами. В этом варианте осуществления, рабочий орган 12 содержит только дальние электроды 5001, при этом металлическая опора 24 служит в качестве обратного электрода. Дальние электроды 5001 не простираются по всей длине опоры 24, но только на части длины. В иллюстрируемом варианте осуществления, дальние электроды 5001 имеют длину только лишь приблизительно 20 мм вдоль 60-мм опоры, так что дальние электроды 5001 покрывают только приблизительно самую дальнюю 1/3 длины опоры. В других вариантах осуществления, дальние электроды 5001 могут покрывать наиболее дальнюю 1/10-1/2 часть длины опоры. Такие варианты осуществления могут использоваться для точечной коагуляции, как описано в патенте США. №5599350, который включается сюда в качестве ссылки.
Фигура 28 показывает еще один вариант осуществления рабочего органа 12 с радиочастотными электродами. В этом варианте осуществления, активный электрод 500 располагается на дальнем конце опоры 24, изолированно от опоры 24 с помощью электрически непроводящего изолятора 504, который может изготавливаться из керамического материала. Такой вариант осуществления может использоваться для точечной коагуляции.
Фигуры 29-32 иллюстрируют другие варианты осуществления рабочего органа 12, которые могут быть пригодными для точечной коагуляции. В этих вариантах осуществления, опора 24 содержит пару электродов 5001, 5002 на дальнем конце опоры 24, расположенных вдоль латеральной стороны опоры 24. Фигура 29 представляет собой вид спереди со стороны торца опоры 24, в соответствии с таким вариантом осуществления, Фигура 30 представляет собой вид сбоку, Фигура 31 представляет собой увеличенный частичный вид спереди с торца и Фигура 32 представляет собой вид сверху. В таком варианте осуществления, металлическая опора 24 может действовать как обратный электрод. Активные электроды 5001, 5002 могут изолироваться от опоры 24 с помощью электрически непроводящих изоляторов 504, которые могут содержать керамический материал.
Фигуры 33-36 показывают вариант осуществления, где опора 24 содержит два дальних электрода 5001, 5002, расположенных в верхней центральной части опоры 24. Опять же, металлическая опора 24 может действовать в качестве обратного электрода и активные электроды 5001, 5002 могут изолироваться от опоры 24 с помощью электрически непроводящих изоляторов 504.
Фигуры 37-40 показывают вариант осуществления, где один активный электрод 5001 (например, активный электрод) располагается на опоре 24, а другой активный электрод 5002 располагается на нижней губке 22, а предпочтительно, на картридже 34. Металлическая опора 24 может служить в качестве обратного электрода. Электрод опоры 5001 изолируется от опоры 24 с помощью изолятора 504. Электрод 5002, располагающийся в картридже 34, который предпочтительно изготовлен из непроводящего материала, такого как пластик, изолируется от металлического канала 22 с помощью картриджа 34.
Фигуры 41-44 показывают вариант осуществления, где опора 24 имеет два активных электрода 5001, 5002 на самом дальнем конце опоры 24, которые простираются полностью от верхней поверхности опоры 24 до нижней поверхности. Опять же, металлическая опора 24 может действовать в качестве обратного электрода и активные электроды 5001, 5002 могут изолироваться от опоры 24 с помощью электрически непроводящих изоляторов 504.
Фигуры 45-48 показывают вариант осуществления, где картридж 34 имеет два активных электрода 5001, 5002 на самом дальнем конце скобочного картриджа 34. В таком варианте осуществления, металлическая опора 24 или металлический канал 22 может действовать в качестве обратного электрода. В этом иллюстрированном варианте осуществления, электроды 5001, 5002 соединяются с изолирующими вставками 503, но в других вариантах осуществления изолирующие вставки 503 могут отсутствовать и пластиковый картридж 34 может служить в качестве изолятора для электродов 5001, 5002.
Фигуры 49-52 показывают вариант осуществления, имеющий один активный электрод 5001 на самом дальнем конце опоры 24 и другой активный электрод 5002 на самом дальнем конце картриджа 34. Опять же, в таком варианте осуществления, металлическая опора 24 или металлический канал 22 может действовать в качестве обратного электрода. В этом иллюстрированном варианте осуществления, электрод 5002 соединяется с изолирующими вставками 503, 505, но в других вариантах осуществления, изолирующие вставки 503, 505 могут отсутствовать и пластиковый картридж 34 может служить в качестве изолятора для электрода 5002.
Фигура 57 представляет собой вид сбоку, а Фигура 58 представляет собой вид сбоку в поперечном разрезе рукоятки 6, в соответствии с другими вариантами осуществления настоящего изобретения. Иллюстрируемый вариант осуществления включает в себя только один спусковой механизм, спусковой механизм 18 смыкания. Активация ножа, ведущих элементов скобок и/или радиочастотных электродов, в этом варианте осуществления, может достигаться с помощью иных средств, чем отдельный спусковой механизм выстреливания. Например, как показано на Фигуре 57, приведение в действие ножа, ведущих элементов скобок и/или радиочастотных электродов может активироваться с помощью переключателя с нажимной кнопкой 540 или другого типа переключателя, который находится в положении, которое удобно для оператора. На Фигуре 57, переключатель 540 показан в самом ближнем участке рукоятки 6. В другом варианте осуществления, переключатель может располагаться вблизи дальнего конца рукоятки 6, так что вытягивание сопла 539 активизирует переключатель, вызывая приведение в действие инструмента. В таком варианте осуществления, переключатель (не показан) может располагаться под соплом 539 или вблизи него, так что перемещение сопел задевает переключатель.
Альтернативно, приведение в действие ножа, ведущих элементов скобок и/или радиочастотных электродов может активироваться голосом или другими звуковыми командами, детектируемыми микрофоном 542. В других вариантах осуществления, рукоятка 6 может содержать радиочастотный или звуковой приемопередатчик 541, который может принимать и/или передавать радиочастотные или звуковые сигналы для активизации инструмента. Также, как показано на Фигуре 58, ножная педаль или переключатель 544 может использоваться для активизации инструмента 10. Ножная педаль 544 может соединяться с рукояткой 6 с помощью кабеля 545. Также, рукоятка 6 может содержать управление с помощью набора 546 или другое пригодное для использования устройство управления для управления приведением в действие сегментированных радиочастотных электродов (смотри, например, Фигуры 23 и 24). Используя такое устройство 546 управления, оператор может последовательно активизировать различные пары радиочастотных электродов 500 в рабочем органе 12.
Инструмент 10, показанный на Фигурах 57 и 58, также включает в себя множество систем обратной связи для пользователя. Как рассмотрено выше, инструмент 10 может содержать динамик 543 для озвучивания команд или инструкций для оператора. В дополнение к этому, рукоятка 6 может содержать визуальные индикаторы 548, такие как светодиоды или другие источники света, которые обеспечивают визуальную обратную связь относительно приведения в действие различных сегментированных радиочастотных электродов. Например, каждый из визуальных индикаторов 548 может соответствовать одной из пар сегментированных радиочастотных электродов. Соответствующий визуальный индикатор 548 может активизироваться, когда активизируется пара сегментированных радиочастотных электродов. В дополнение к этому, рукоятка 6 может содержать буквенно-цифровой дисплей 550, который, например, может представлять собой светодиодный или ЖК дисплей. Дисплей 550 может соединяться с печатной платой 552 внутри рукоятки 6. Рукоятка 6 может также содержать вибратор 554 в участке пистолетной ручки 26, который может обеспечивать вибрационную обратную связь с оператором. Например, вибратор 554 может вибрировать каждый раз, когда активизируется одна из пар сегментированных радиочастотных электродов в рабочем органе 12.
Фигура 26 представляет собой вид в поперечном разрезе рабочего органа 12 в соответствии с различными вариантами осуществления, где электроды находятся на верхней губке 24 (или опоре). В иллюстрируемом варианте осуществления, активные электроды 500 располагаются рядом со щелью 516 для ножа. Металлическая опора 24 может служить в качестве обратного электрода. Изоляторы 504, которые могут изготавливаться из керамики, изолируют электроды 500 от металлической опоры 24. Вариант осуществления Фигуры 68 сходен с Фигурой 26, за исключением того, что электроды 500 сделаны меньшими, так что участок изоляторов 504 может простираться между соответствующими электродами 500 и краями канала 516 для ножа.
Фигура 53 представляет собой вид поперечного разреза со стороны дальнего конца рабочего органа 12, в соответствии с другим вариантом осуществления. В этом варианте осуществления, подобно варианту осуществления Фигуры 26, активные электроды 5001, 5002 находятся на опоре 24, на противоположных сторонах канала для ножа. Электроды 5001, 5002 изолируются от металлической опоры с помощью изоляторов 504, которые опять же предпочтительно содержат керамический материал. В этом варианте осуществления, однако, изоляторы 504 изготавливаются очень тонкими (по сравнению с Фигурой 26). Изготовление изоляторов 504 очень тонкими обеспечивает то потенциальное преимущество тем, что опора 24 может включать в себя относительно большую металлическую секцию 520 над электродами 500, тем самым потенциально поддерживая тонкий профиль опоры для данной жесткости опоры или более жесткий профиль для данного размера поперечного сечения опоры. Изоляторы 504 могут отливаться в опоре 24 или наноситься на нее напылением.
Фигура 54 иллюстрирует другой вариант осуществления. В этом варианте осуществления, активные электроды 5001, 5002 наносятся напылением или связываются с изоляторами 504, которые могут также наноситься напылением или связываться с опорой 24. Подобно варианту осуществления на Фигуре 53, эта конструкция позволяет иметь больше материала опоры над электродами. В таком варианте осуществления, электроды 5001, 5002 могут содержать серебро, которое является хорошим проводником электричества и имеет противомикробные свойства.
Фигура 55 показывает вид сбоку рабочего органа, в соответствии с другим вариантом осуществления. В этом варианте осуществления, тонкая пленка электрически изолирующего материала 530 нанесена на лицевой стороне картриджа 34. Изолирующая пленка 530 предпочтительно содержит материал, стойкий к теплу и дуговому разряду, такой как керамика. Это дало бы тенденцию к увеличению сопротивления картриджа 34 к воздействию дугового разряда и к короткому замыканию, делая возможным большее количество выстреливаний между заменами картриджа 34. В дополнение к этому, если картридж 34 представляет собой плохой проводник электричества, это могло бы способствовать более быстрому нагреву ткани и уменьшению общей потребности в энергии. Активные электроды (не показаны на Фигуре 55) могут находиться в опоре 24, как описано в вариантах осуществления, выше.
Фигура 56 показывает вариант осуществления, который сходен с тем, который показан на Фигуре 55, за исключением того, что на Фигуре 56 тонкий слой 532 слабо проводящего электричество материала нанесен поверх изолирующей пленки 530. Проводимость тонкого, слабо проводящего слоя 532 может быть ниже, чем проводимость ткани, зажатой в рабочем органе 12 для обработки. Как таковой, тонкий, слабо проводящий слой 532 может обеспечивать путь с ограниченной проводимостью для обеспечения дополнительного нагрева зажатой ткани. Это дало бы тенденцию к уменьшению времени, необходимого для нагрева ткани и достижения коагуляции.
Как описано выше, инструмент 10 может содержать штырь 14 шарнирного сочленения для шарнирного сочленения рабочего органа 12. Врач или оператор инструмента 10 могут шарнирно сочленять расположение рабочего органа 12 по отношению к валу 8 посредством использования управления шарнирным сочленением 16, как описано более подробно в опубликованной заявке на патент США, № публикации 2007/0158385 A1, озаглавленной “Surgical Instrument, Having An Articulating End Effector”, Geoffrey C. Hueil et al., которая включается сюда в качестве ссылки. В другом варианте осуществления, вместо устройства управления, которое встраивается в инструмент 10, рабочий орган 12 может шарнирно сочленяться с помощью отдельного инструмента, такого как захватное устройство, которое вставляется в пациента, так что его рабочий участок находится вблизи рабочего органа 12, так что оно может шарнирно сочленять рабочий орган 12 по желанию. Отдельный инструмент может вставляться через отверстия, иные, чем отверстия для рабочего органа 12, или через это же отверстие. Также, различные операторы могут работать с отдельными инструментами, или один человек может работать с обоими инструментами, для шарнирного сочленения рабочего органа 12. В другом пассивном сценарии шарнирного сочленения, рабочий орган 12 может быть шарнирно сочленен посредством осторожного проталкивания его к другим частям пациента для достижения желаемого шарнирного сочленения.
В другом варианте осуществления, рабочий орган 12 может соединяться с рукояткой с помощью гибкого кабеля. В таком варианте осуществления, рабочий орган 12 может располагаться по желанию и удерживаться в положении посредством использования другого инструмента, например, отдельного инструмента с захватным устройством. В дополнение к этому, в других вариантах осуществления, рабочий орган 12 может позиционироваться с помощью отдельного инструмента и зажиматься с помощью второго отдельного инструмента. В дополнение к этому, рабочий орган 12 может изготавливаться достаточно малым, например, шириной 8-9 мм и высотой 10-11 мм, так что механизм втягивания до закрытия может использоваться для зажимания рабочего органа из рукоятки 6. Механизм втягивания до закрытия может быть подобен описанному в патенте США. №5562701, озаглавленном “Cable-Actuated Jaw Assembly For Surgical Instruments”, который включается сюда в качестве ссылки. Кабель 600 может располагаться в гибком эндоскопе или вблизи него для использования, например, в процедурах в верхнем или нижнем желудочно-кишечном тракте.
Еще в одном варианте осуществления, как показано на Фигурах 69 и 70, инструмент 10 может содержать сборку 732 гибкой шейки, делая возможным шарнирное сочленение рабочего органа 12. Когда сборка 731 передачи шарнирного сочленения, соединенная с валом 8, вращается, это может вызвать отдаленное шарнирное сочленение сборки 732 гибкой шейки. Сборка 732 гибкой шейки может содержать первый и второй участок 733, 734 гибкой шейки, которые вмещают первую и вторую сборки 735, 736 гибких лент. При вращении сборки 731 передачи шарнирного сочленения, одна из первой и второй сборки 735, 736 гибких лент движется вперед, а другая сборка ленты движется назад. В ответ на возвратно-поступательное движение сборок лент внутри первого и второго участков 733, 734 гибкой шейки сборки 732 гибкой шейки, сборка 732 гибкой шейки изгибается, обеспечивая шарнирное сочленение. Дополнительное описание гибкой шейки описывается в патенте США №5704534, который включается сюда в качестве ссылки.
Устройства, описанные здесь, могут конструироваться для замены после однократного использования, или они могут конструироваться для многократного использования. В любом случае, однако, устройство может быть восстановлено для повторного использования после, по меньшей мере, одного использования. Восстановление может включать в себя любое сочетание этапов разборки устройства, с последующей чисткой или заменой конкретных деталей, и последующей повторной сборки. В частности, устройство может быть разобрано, и любое количество отдельных частей или деталей устройства может быть выборочно заменено или удалено в любом сочетании. При чистке и/или замене отдельных деталей, устройство может повторно собираться для последующего использования либо в учреждении для восстановления, либо посредством хирургического персонала, непосредственно перед хирургической процедурой. Специалисты в данной области заметят, что восстановление устройства может использовать разнообразные технологии для разборки, очистки/замены и повторной сборки. Использование таких технологий и получаемое в результате восстановленное устройство, находятся в рамках настоящей заявки.
Предпочтительно, различные варианты осуществления настоящего изобретения, описанные здесь, будут осуществляться перед хирургическим вмешательством. Сначала, новый или использованный инструмент получают и, если это необходимо, чистят. Затем инструмент может стерилизоваться. В одной из методик стерилизации, инструмент помещают в фиксированный и герметичный контейнер, такой как полученная термоформованием пластиковая оболочка, покрытая листом TYVEK. Затем контейнер и инструмент помещают в поле излучения, которое может проникать через контейнер, такого как гамма-излучение, рентгеновское излучение или электроны высоких энергий. Излучение убивает бактерии на инструменте и в контейнере. Затем стерилизованный инструмент может храниться в стерильном контейнере. Герметичный контейнер поддерживает инструмент стерильным до тех пор, пока его не открывают в медицинском учреждении.
Является предпочтительным, чтобы устройство стерилизовали. Это может осуществляться с помощью любого количества способов, известных специалистам в данной области, включая бета- или гамма-излучение, этиленоксид, пар и другие способы.
Хотя настоящее изобретение иллюстрируется посредством описания нескольких вариантов осуществления, и хотя иллюстративные варианты осуществления описываются достаточно подробно, авторы не предполагают ограничить каким-либо образом рамки прилагаемой формулы изобретения такими подробностями. Дополнительные преимущества и модификации могут легко увидеть специалисты в данной области. Различные варианты осуществления настоящего изобретения представляют собой существенные усовершенствования по сравнению с другими способами с использованием скобок, которые требуют использования скобок различных размеров в одном картридже для получения скобок, которые имеют различную сформированную (конечную) высоту.
Соответственно, настоящее изобретение обсуждается в терминах эндоскопических процедур и устройств. Однако, использование здесь таких терминов, как “эндоскопический” не должно рассматриваться как ограничение настоящего изобретения хирургическим инструментом для скрепления скобками и резания, для использования только в сочетании с эндоскопической трубкой (то есть, трокаром). В противоположность этому, предполагается, что настоящее изобретение может найти применение в любой процедуре, где доступ ограничен, включая, но, не ограничиваясь этим, лапароскопические процедуры, а также открытые процедуры. Более того, уникальные и новые аспекты различных вариантов осуществления скобочных картриджей настоящего изобретения могут найти применения, когда они используются в сочетании с другими формами устройств для скрепления скобками, без отклонения от духа и рамок настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И КРЕПЕЖНЫЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ РАДИОЧАСТОТНЫЕ ЭЛЕКТРОДЫ | 2009 |
|
RU2493788C2 |
| МОТОРИЗОВАННЫЙ РЕЖУЩИЙ И КРЕПЕЖНЫЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ СХЕМУ УПРАВЛЕНИЯ ДЛЯ ОПТИМИЗАЦИИ ИСПОЛЬЗОВАНИЯ БАТАРЕИ | 2009 |
|
RU2496433C2 |
| МОТОРИЗОВАННЫЙ ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И КРЕПЕЖНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2496436C2 |
| МОТОРИЗОВАННЫЙ ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СКРЕПЛЯЮЩИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ УСТРОЙСТВО ОГРАНИЧЕНИЯ КРУТЯЩЕГО МОМЕНТА ЦЕПИ ЭЛЕКТРОМАГНИТНОГО ПРИВОДА | 2009 |
|
RU2492821C2 |
| МОТОРИЗОВАННЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2009 |
|
RU2532300C2 |
| ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2534520C2 |
| ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ И БАТАРЕИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2011 |
|
RU2569712C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С БЕСПРОВОДНОЙ СВЯЗЬЮ МЕЖДУ УСТРОЙСТВОМ УПРАВЛЕНИЯ И УДАЛЕННЫМ ДАТЧИКОМ | 2012 |
|
RU2621125C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2653808C2 |
| УСОВЕРШЕНСТВОВАНИЕ ПРИВОДНОГО ХИРУРГИЧЕСКОГО СШИВАЮЩЕГО ИНСТРУМЕНТА | 2010 |
|
RU2546958C2 |
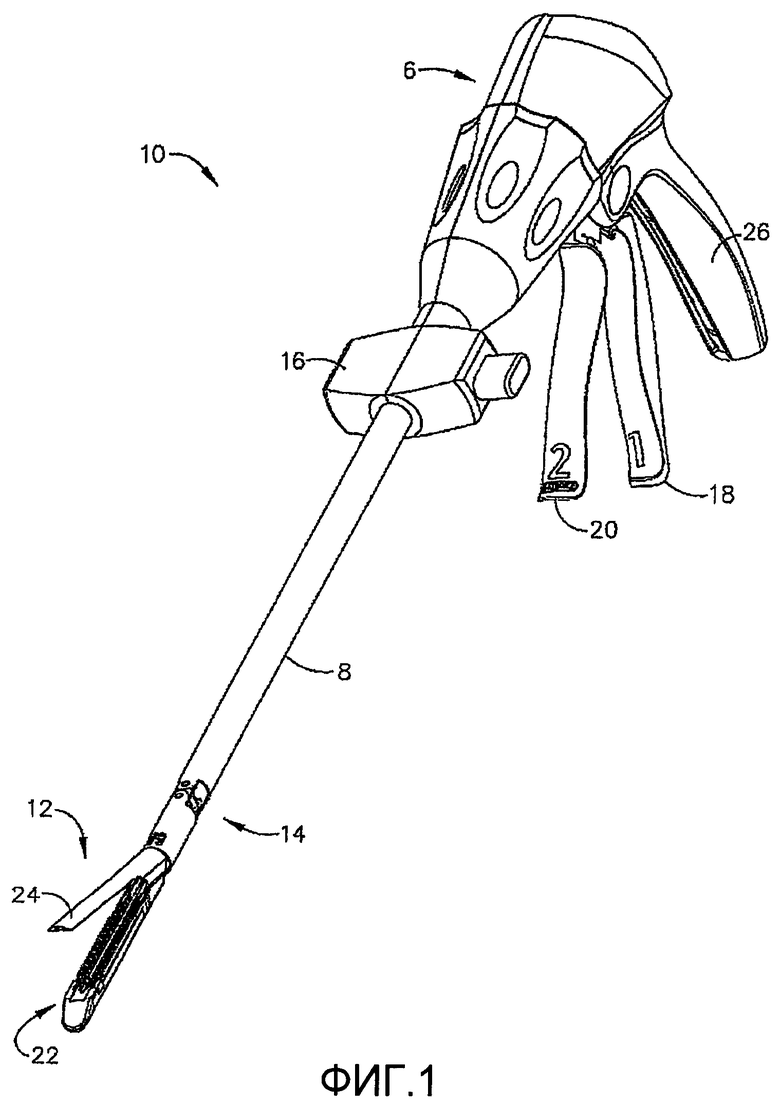
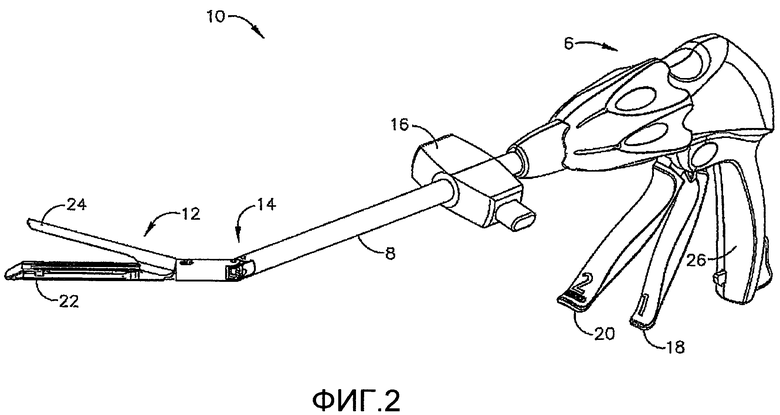
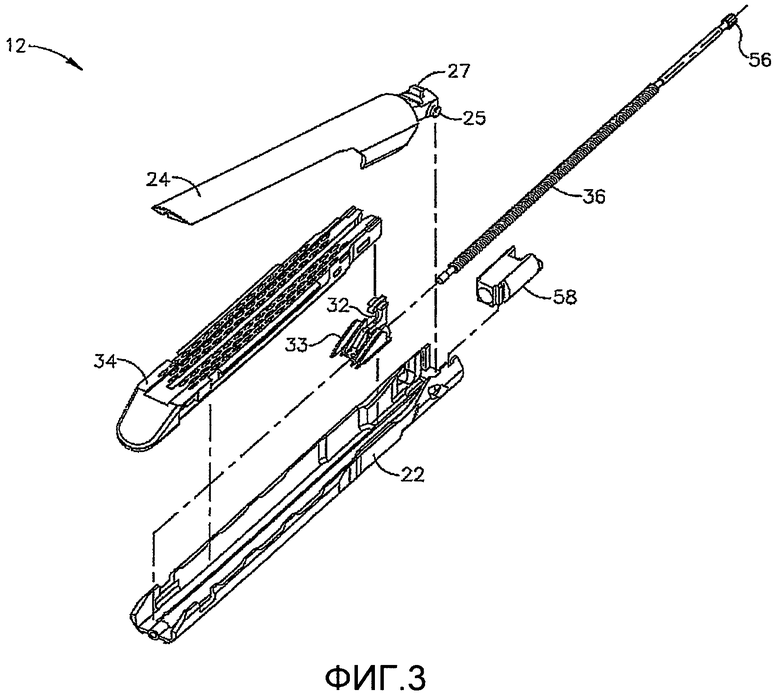
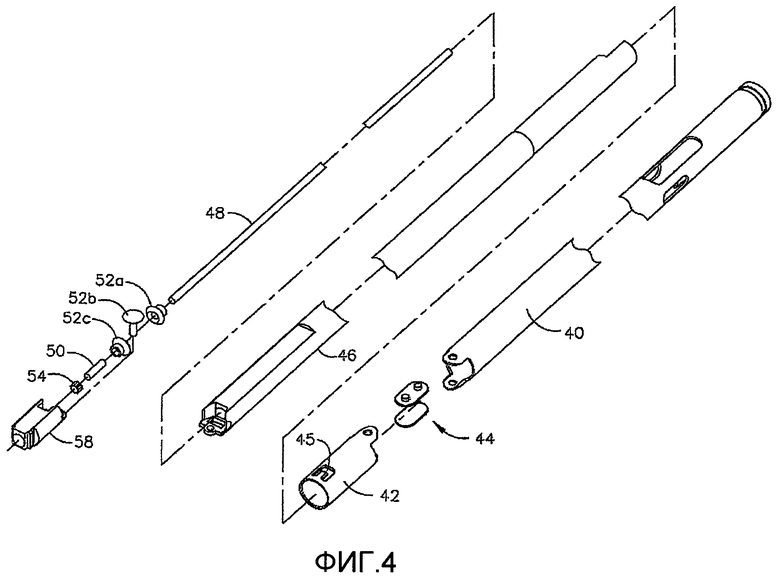
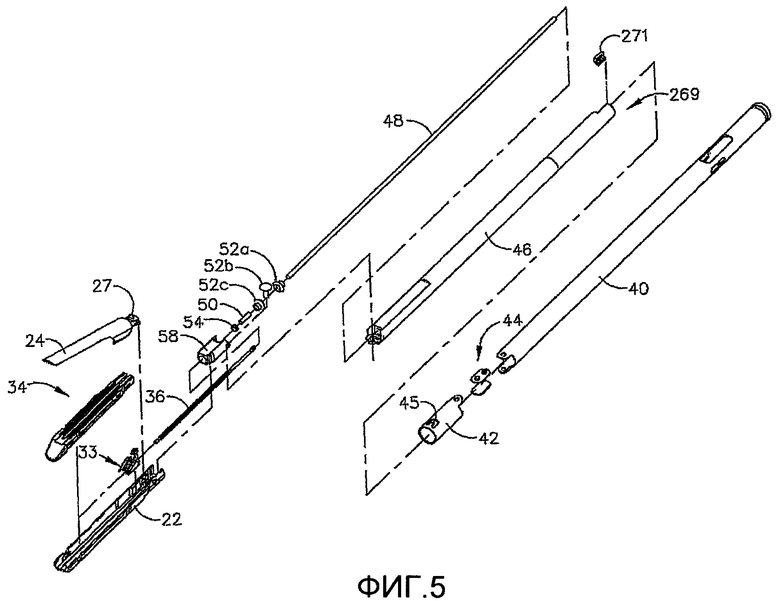
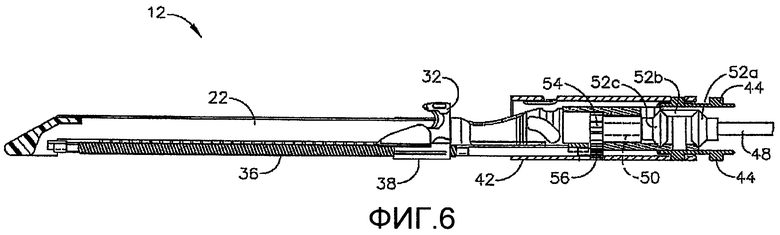
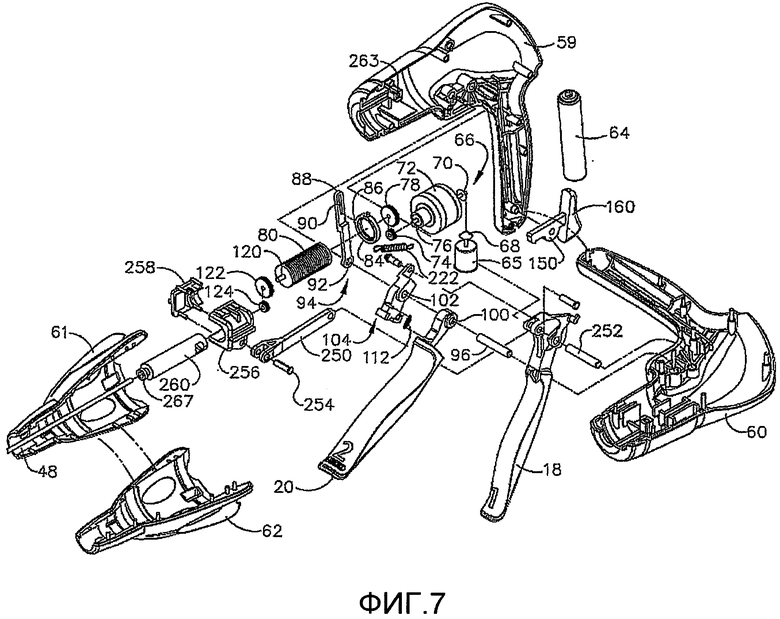
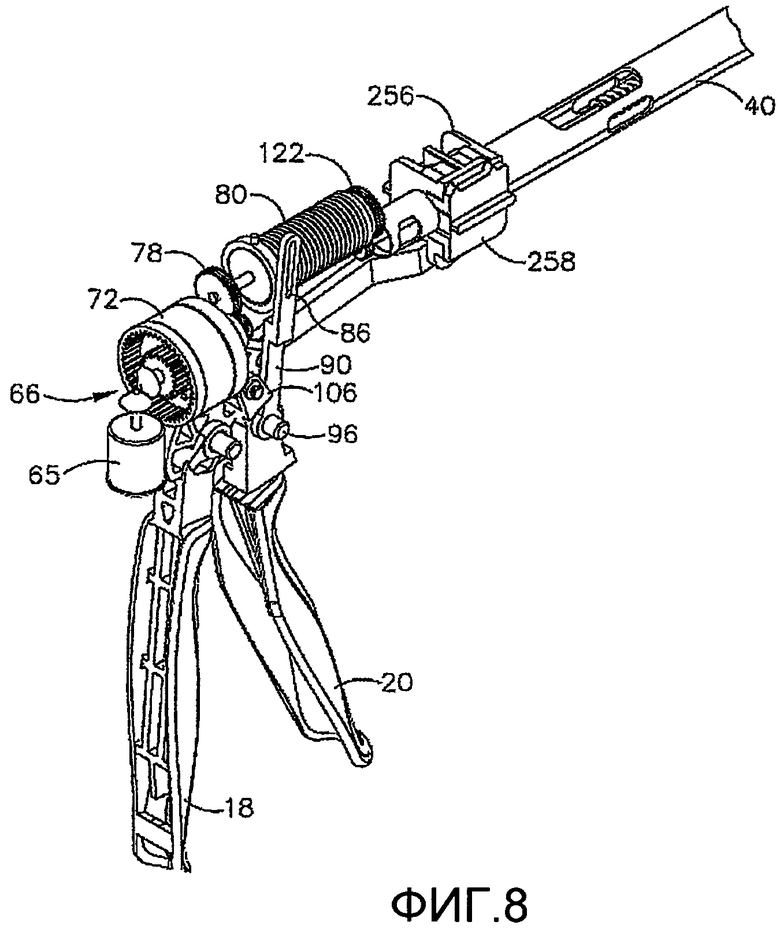
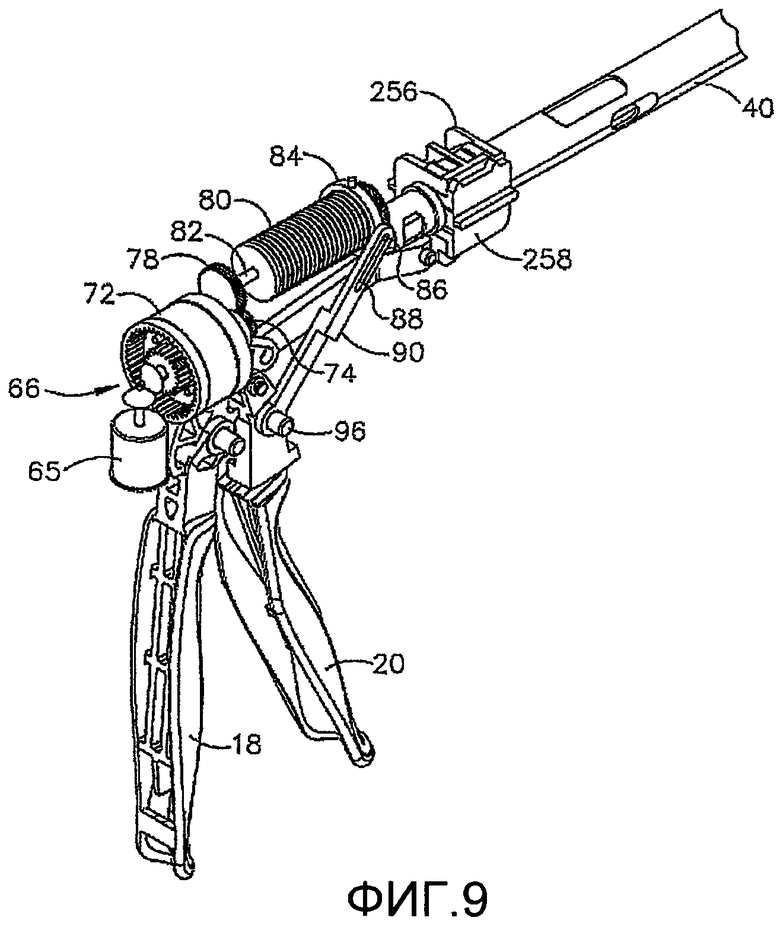
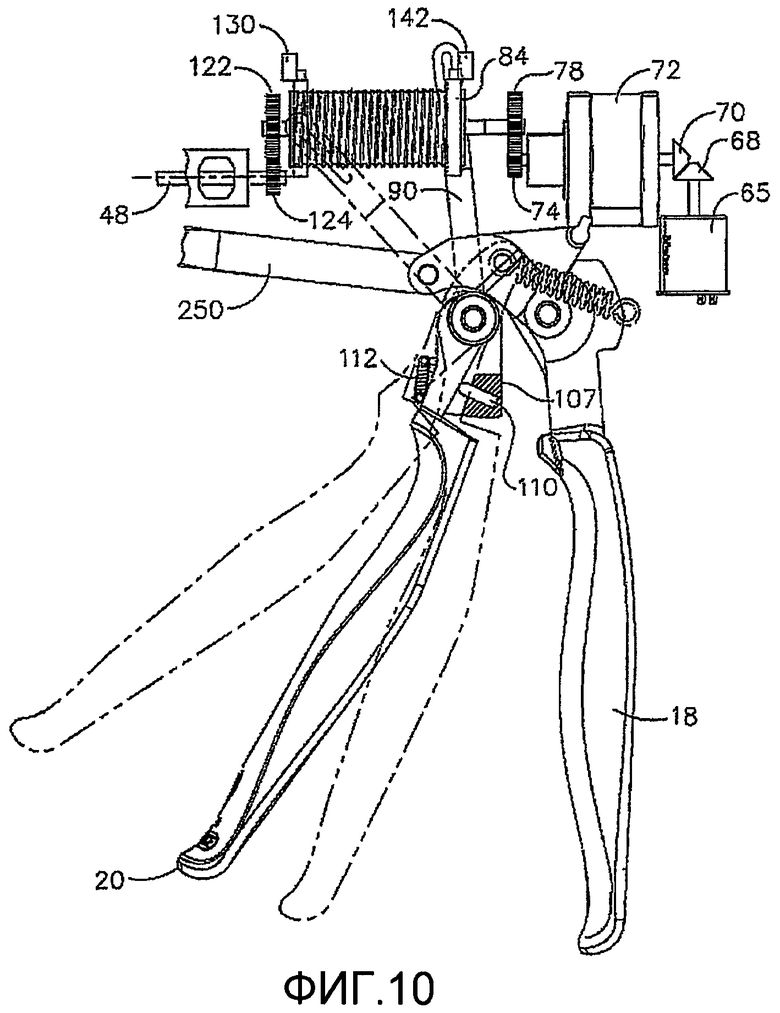
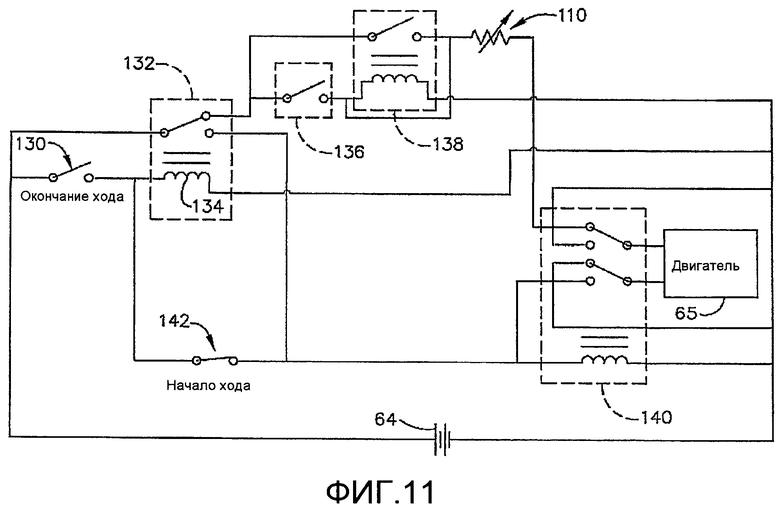
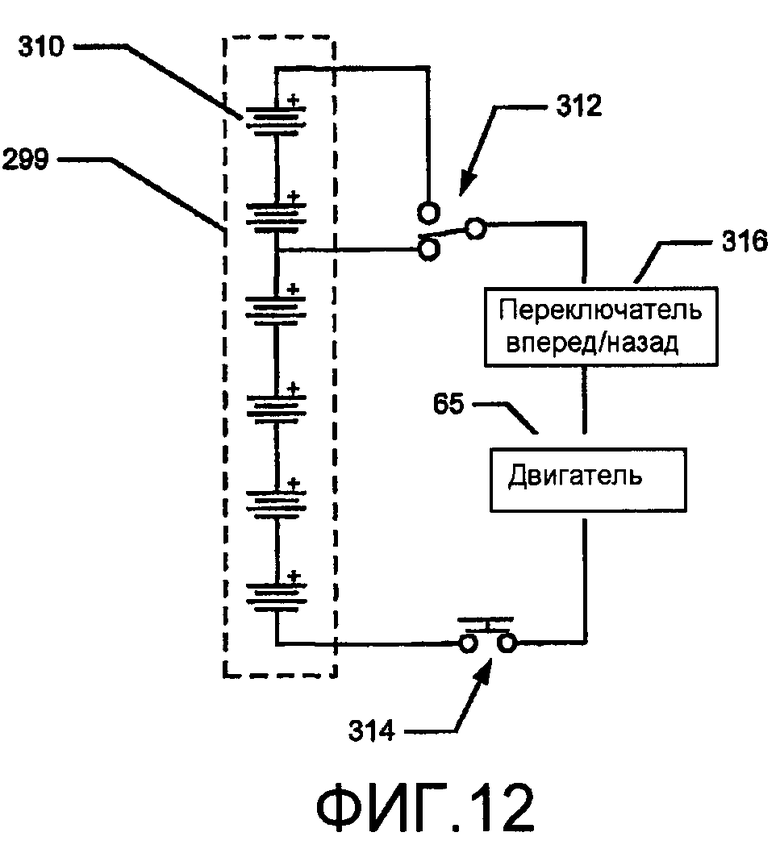
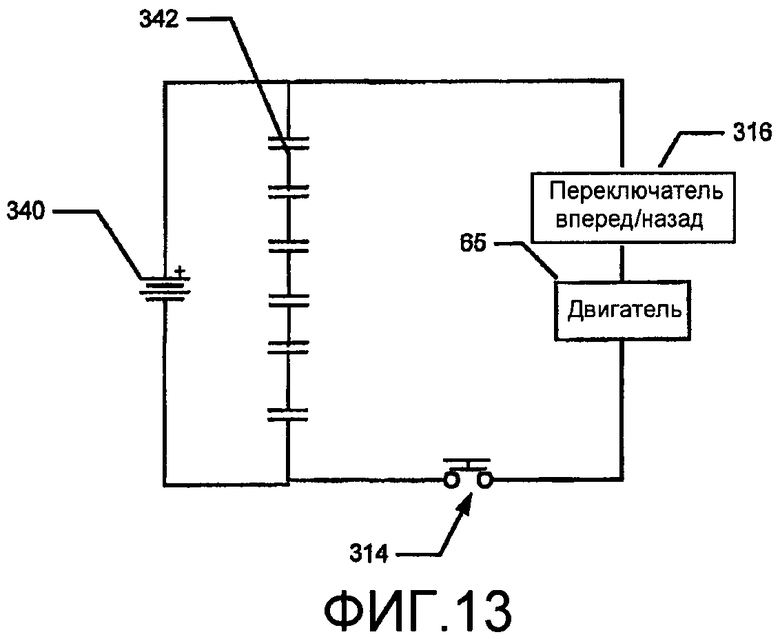
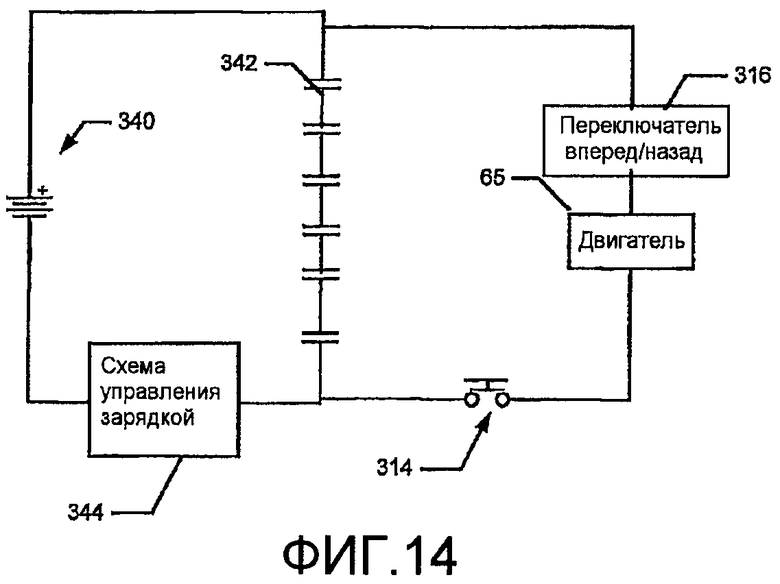
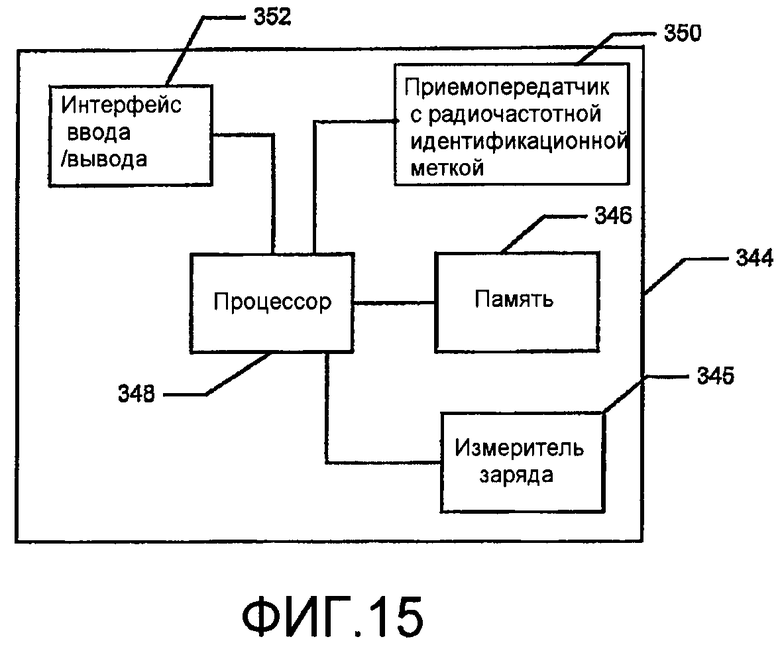
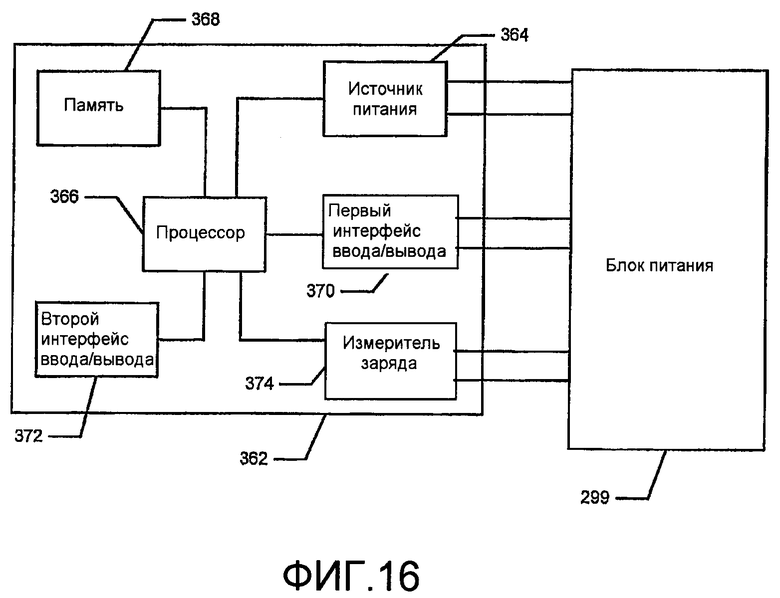
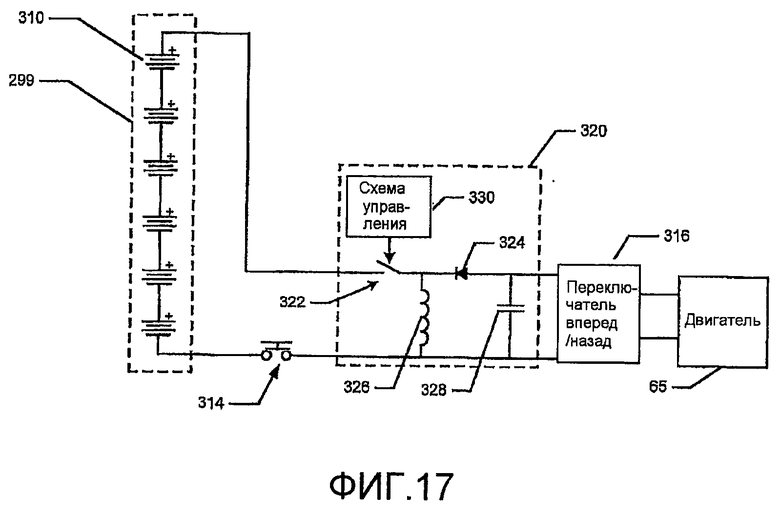
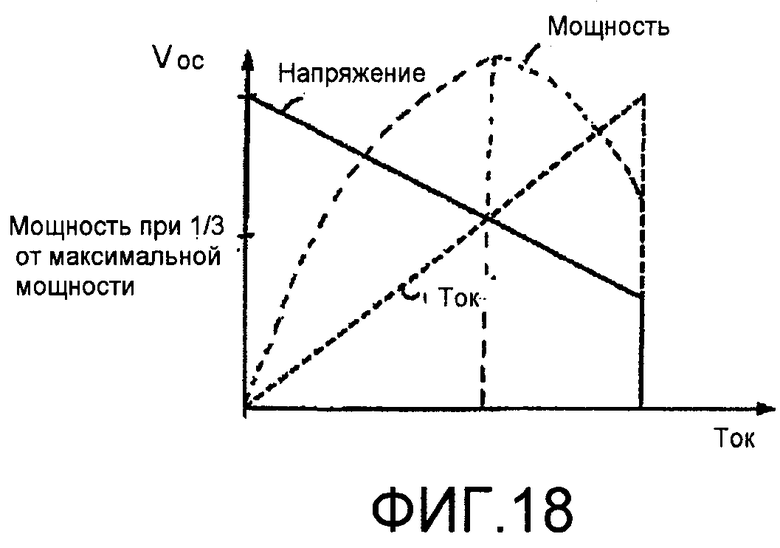
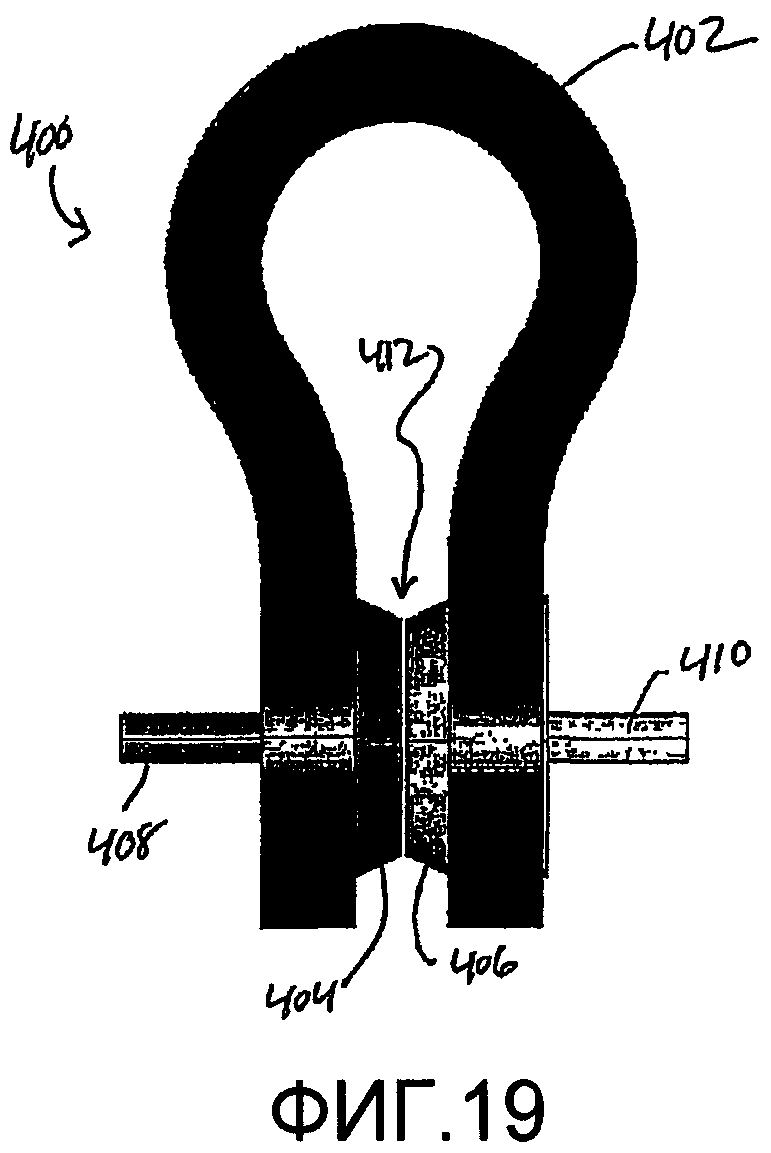
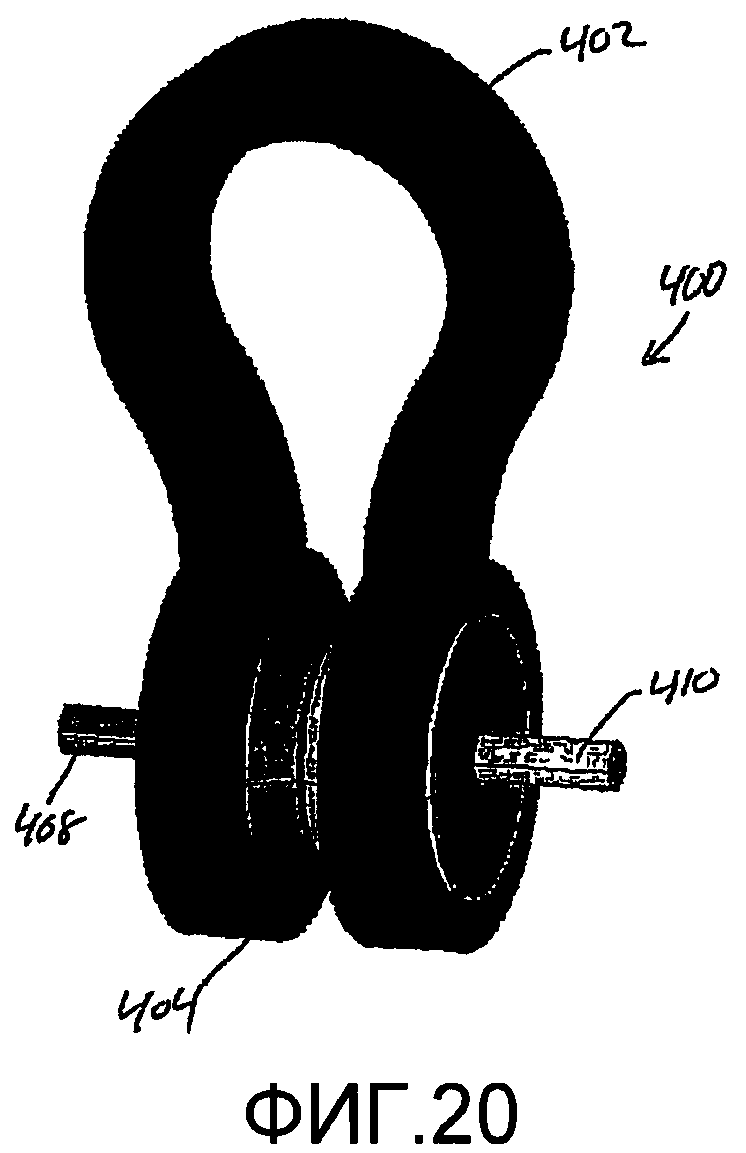
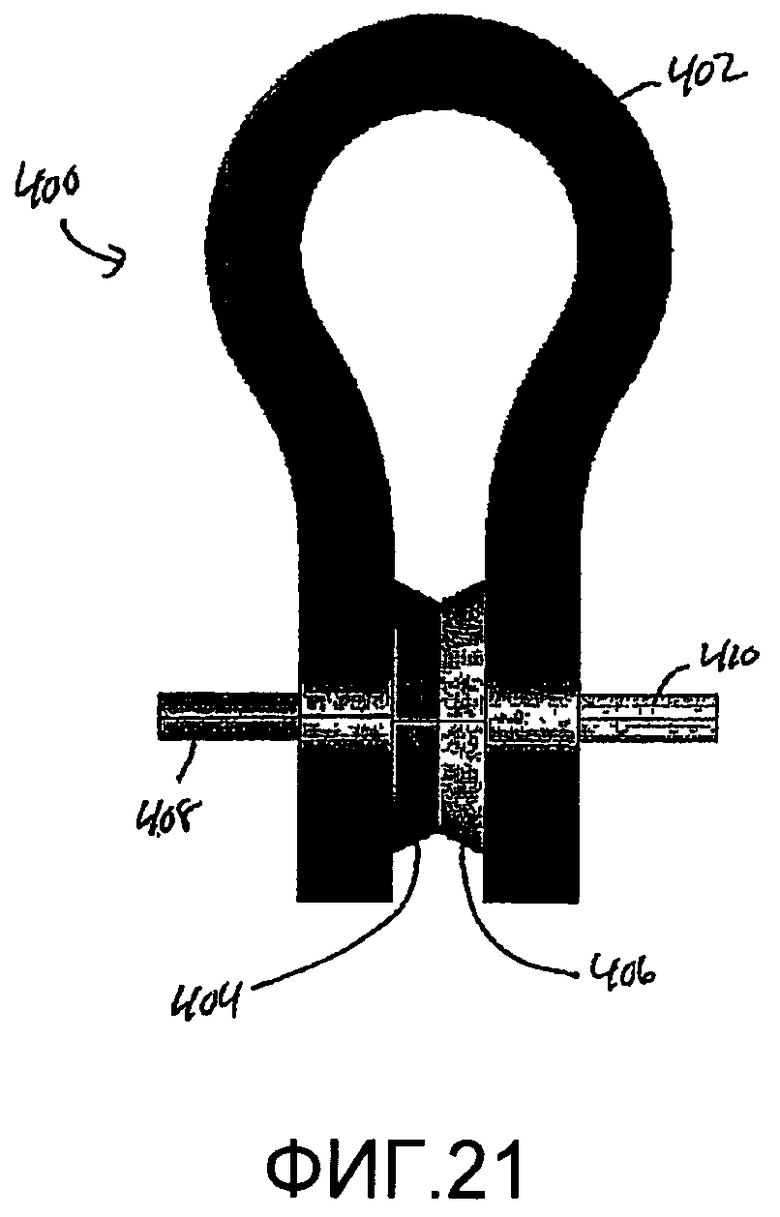
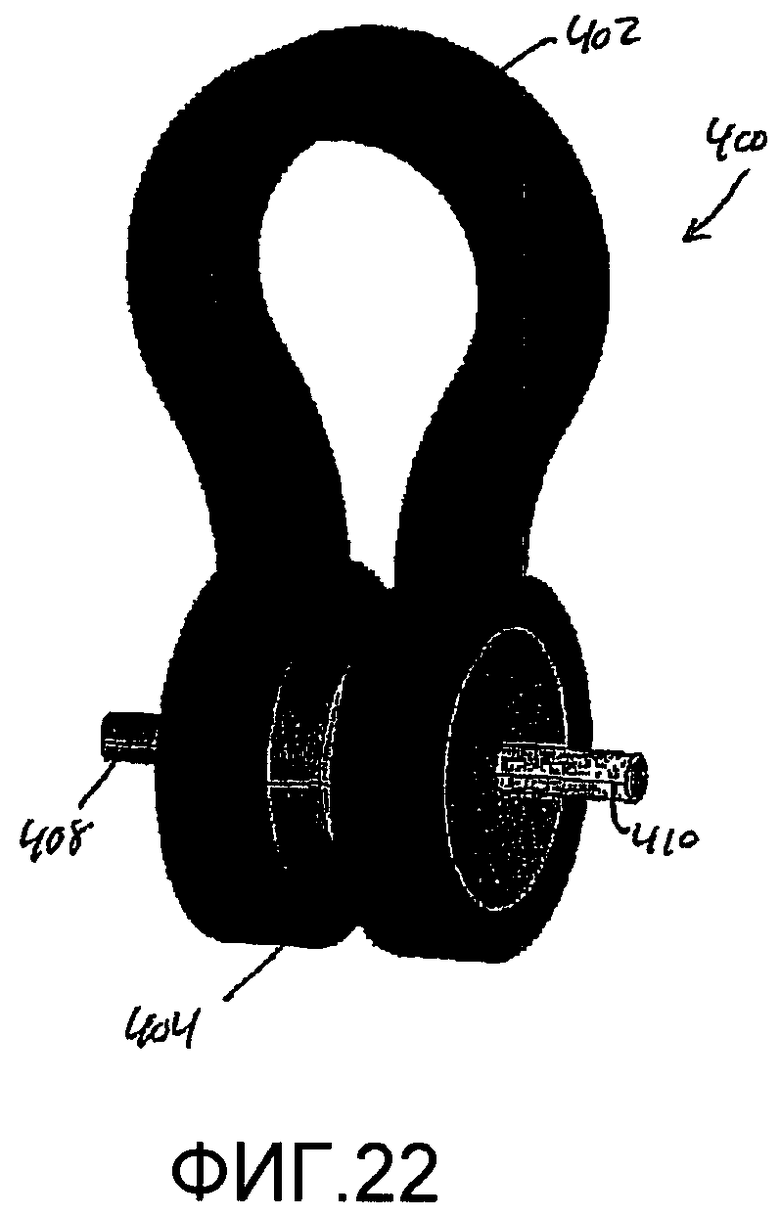
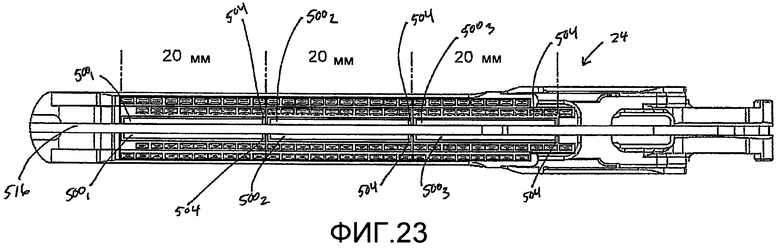
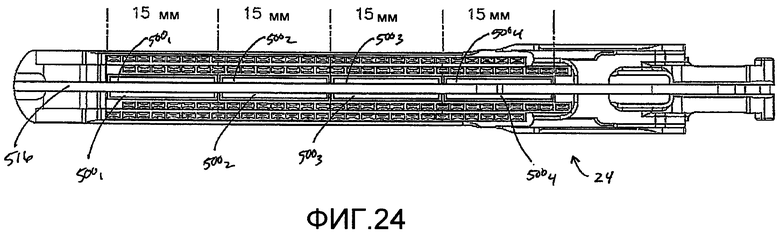
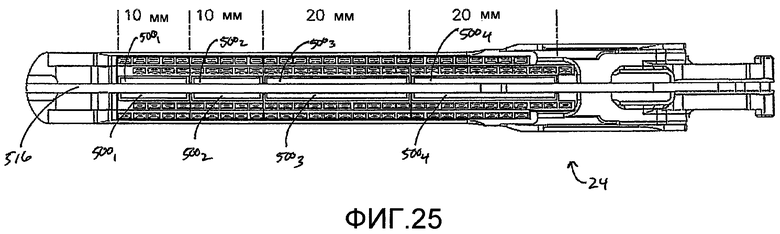
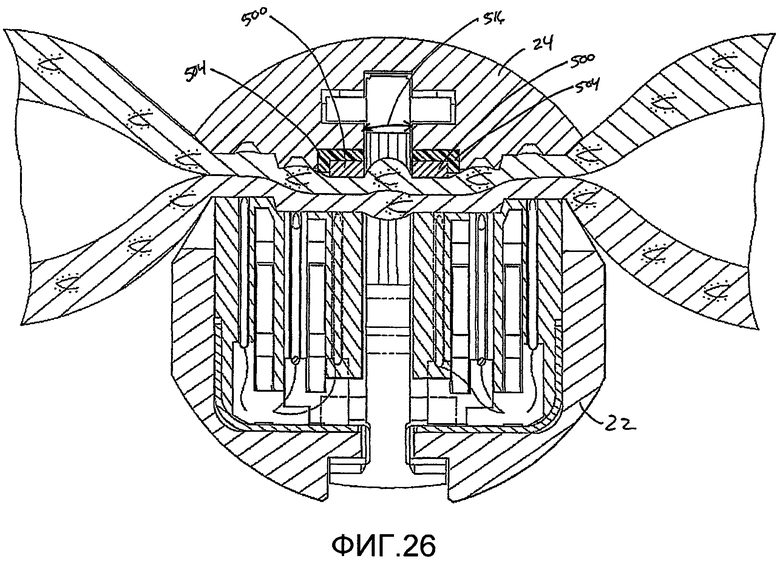
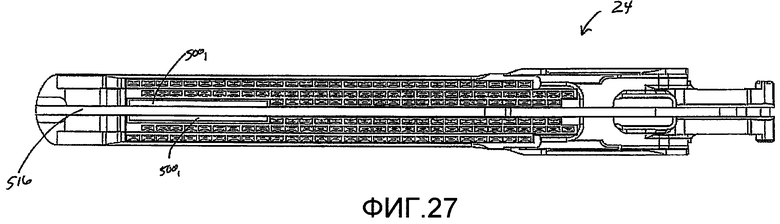
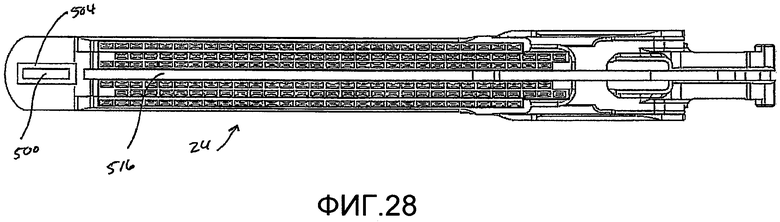
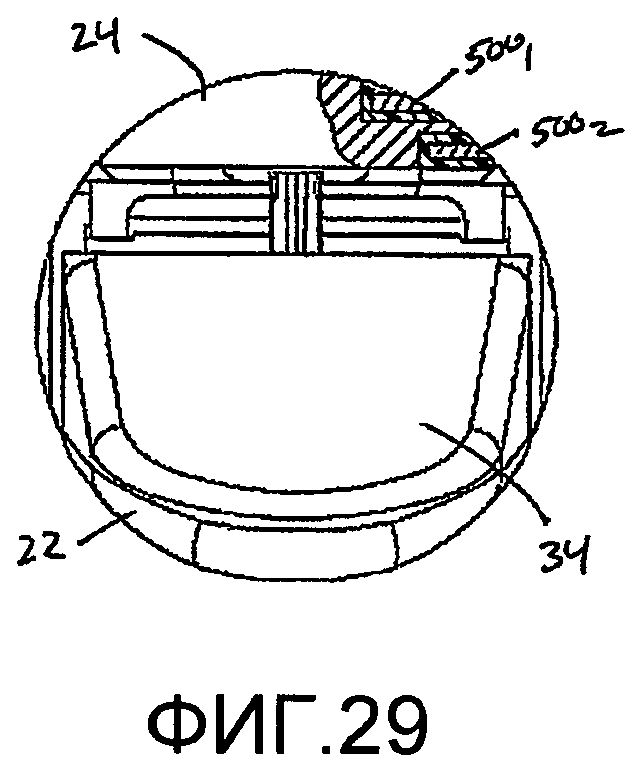
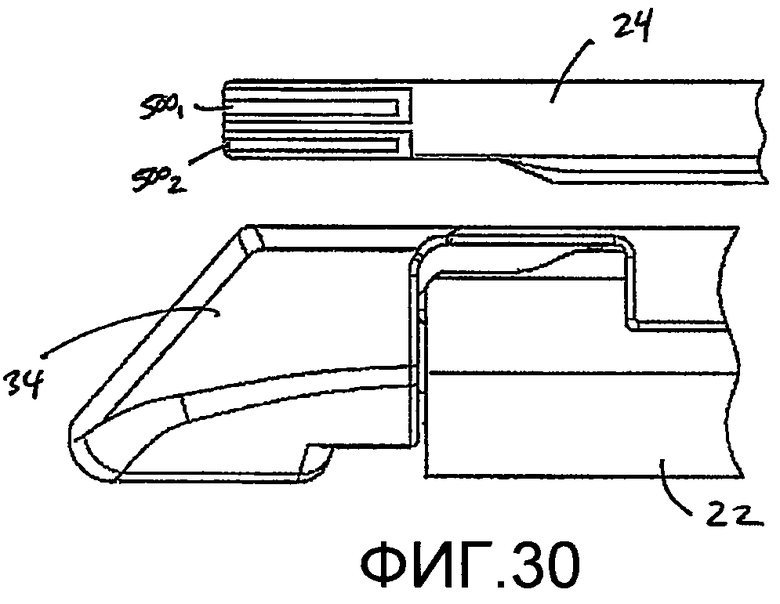
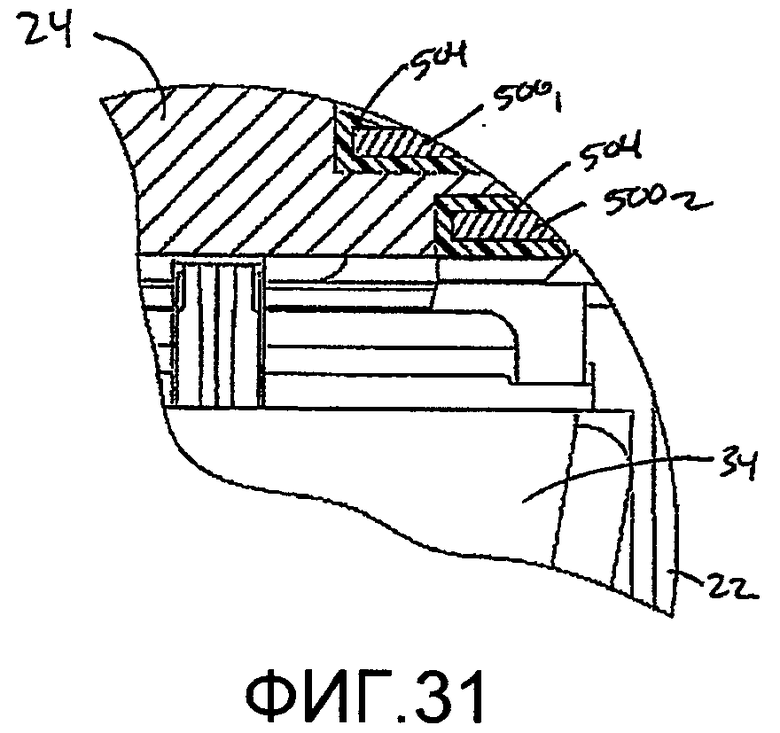
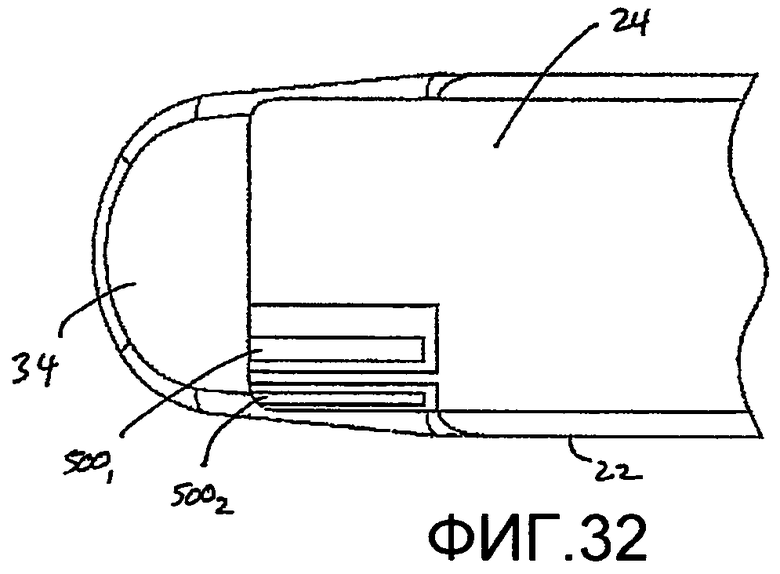
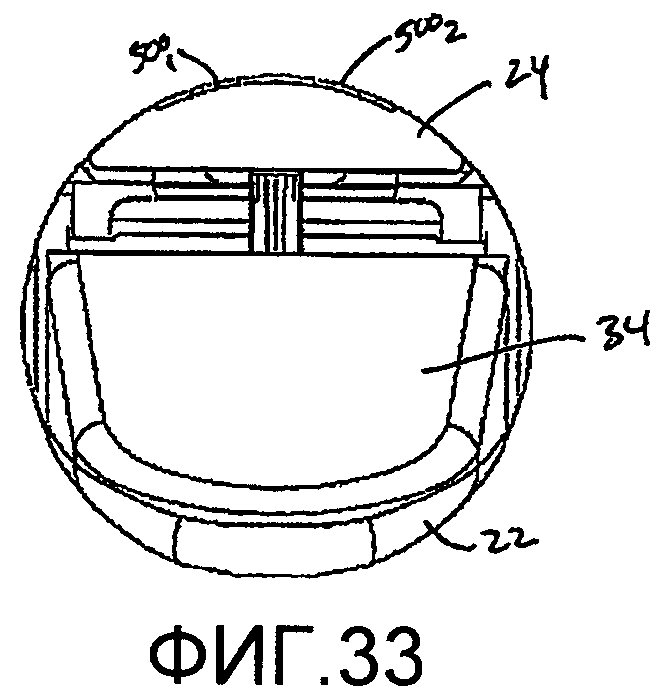
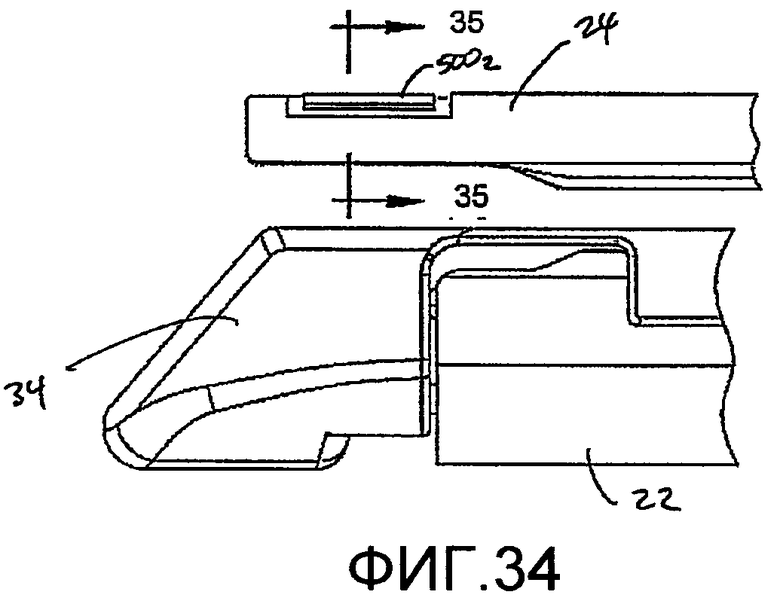
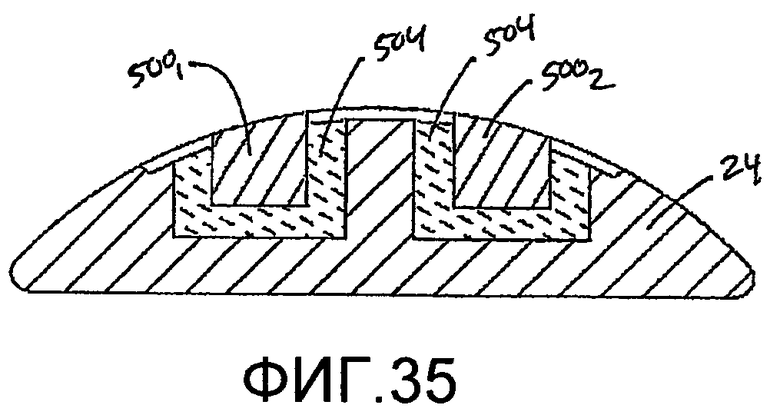
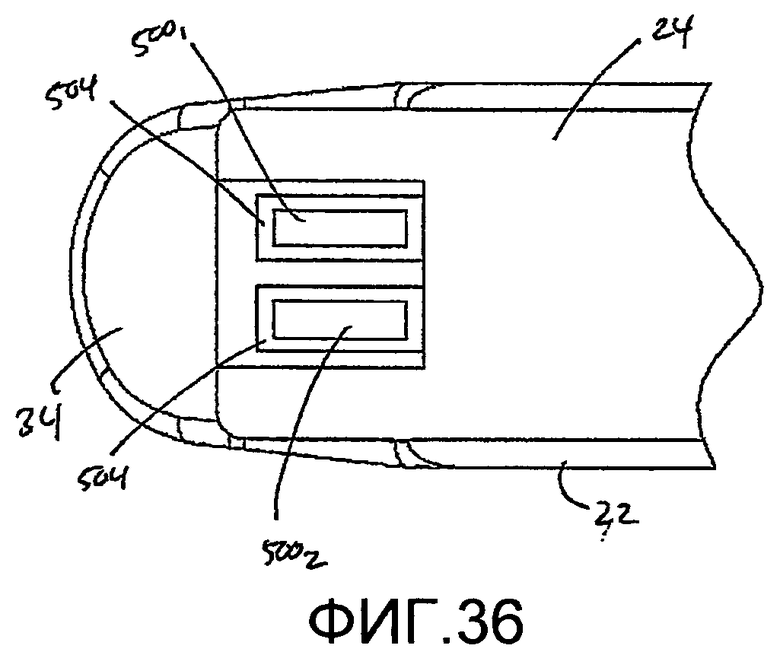
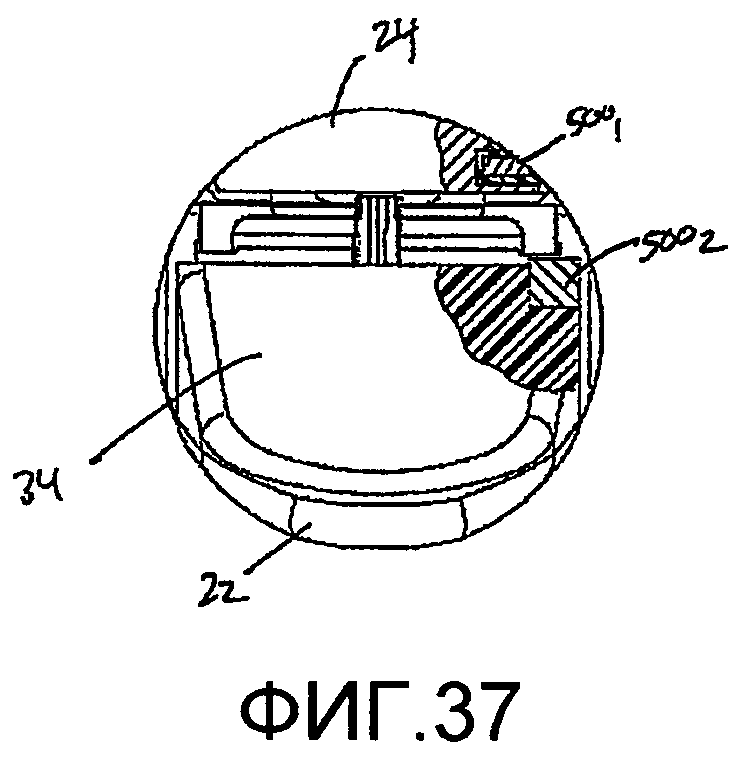
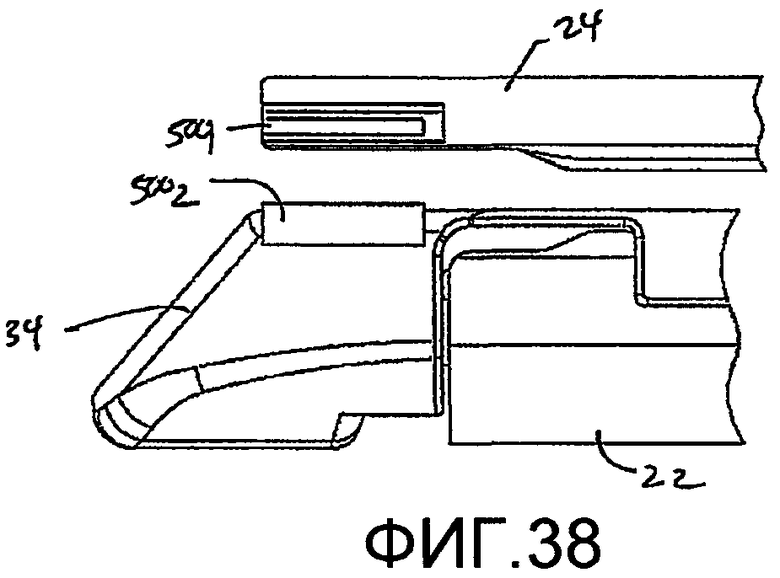
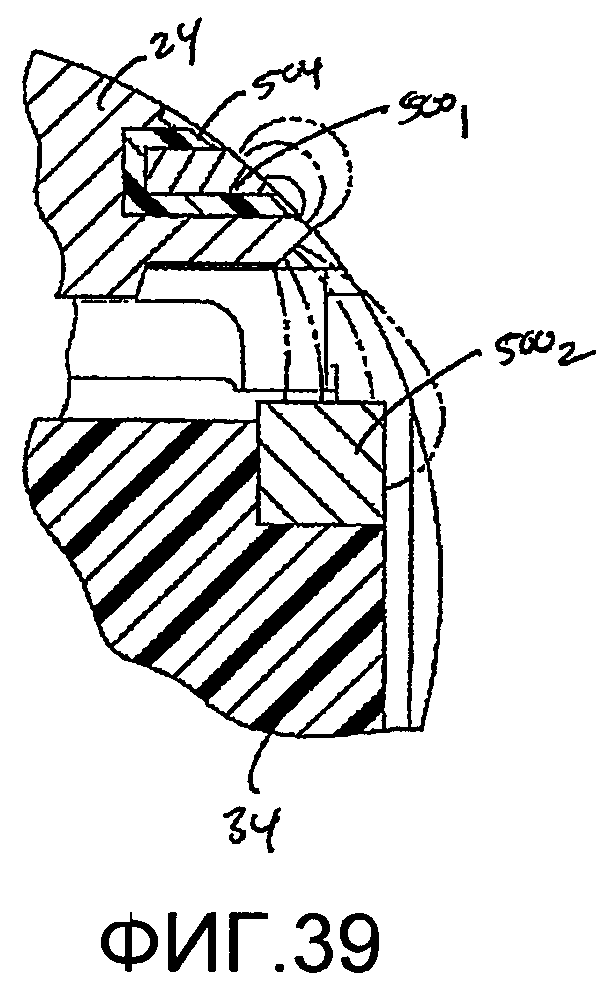
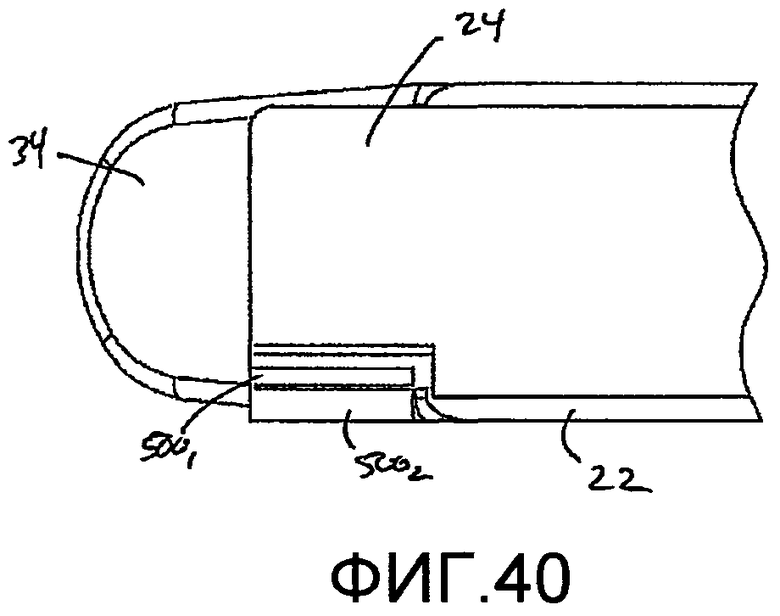
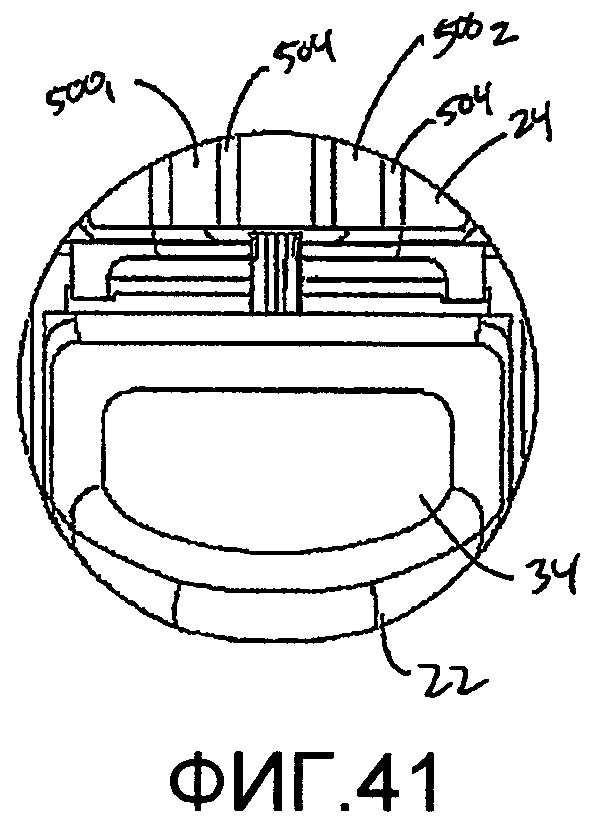
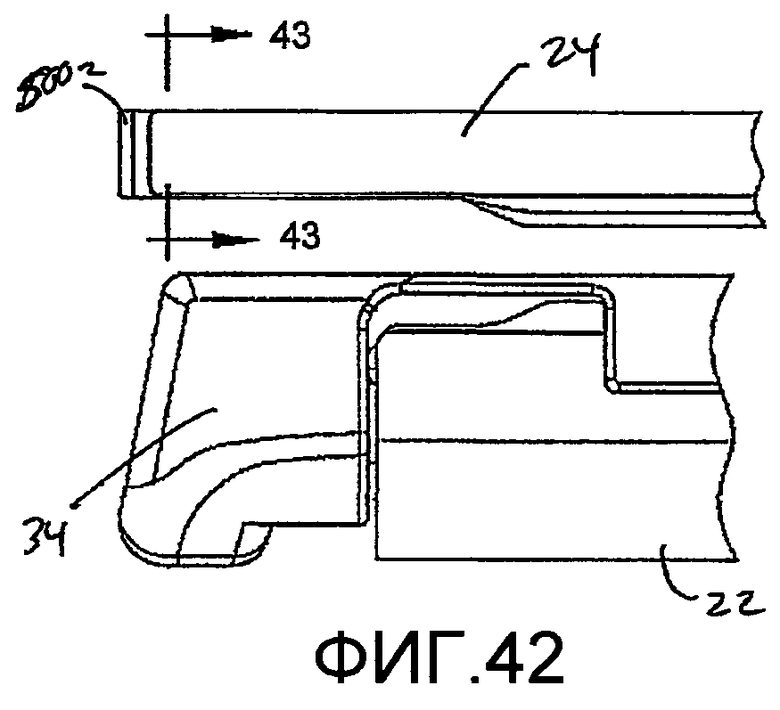
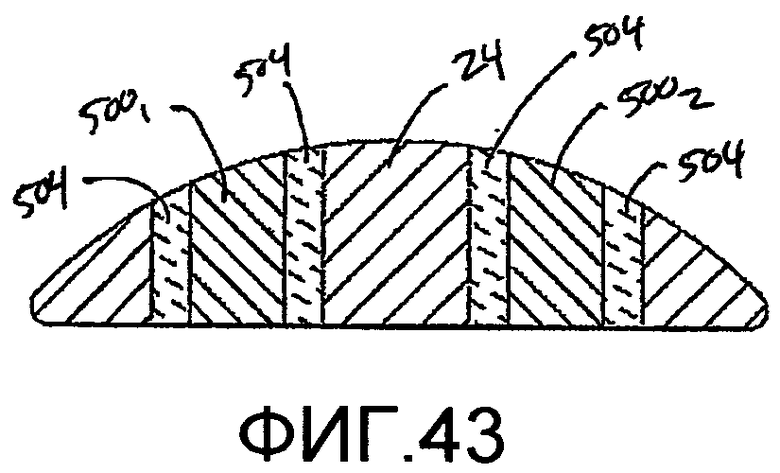
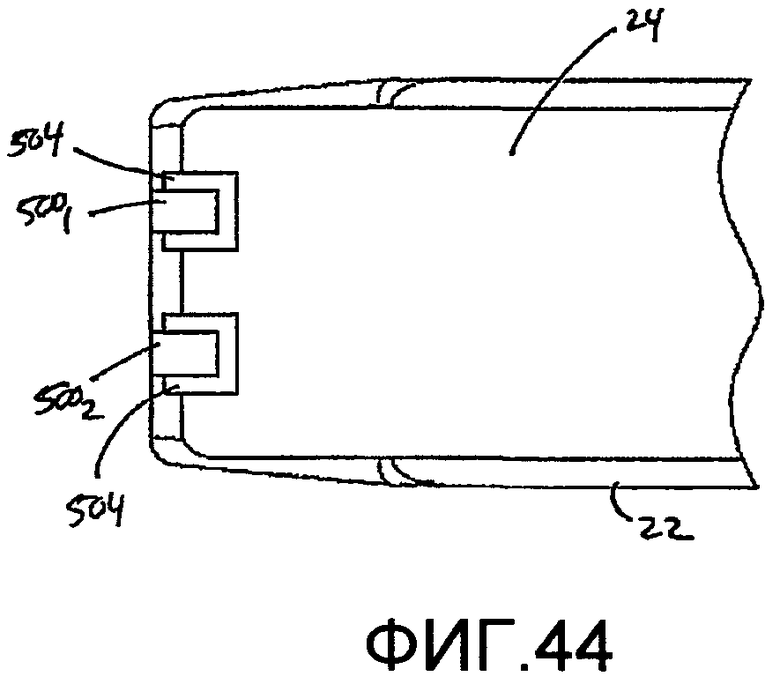
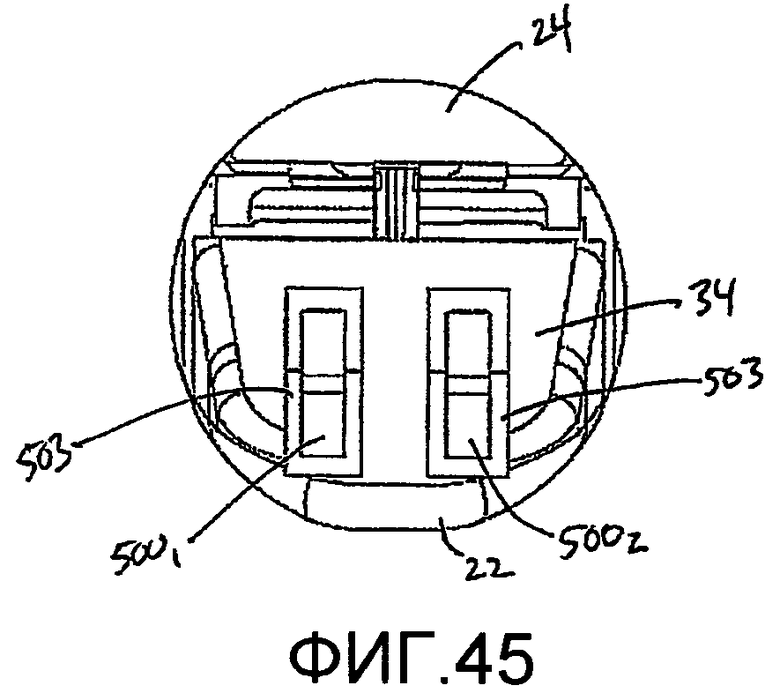
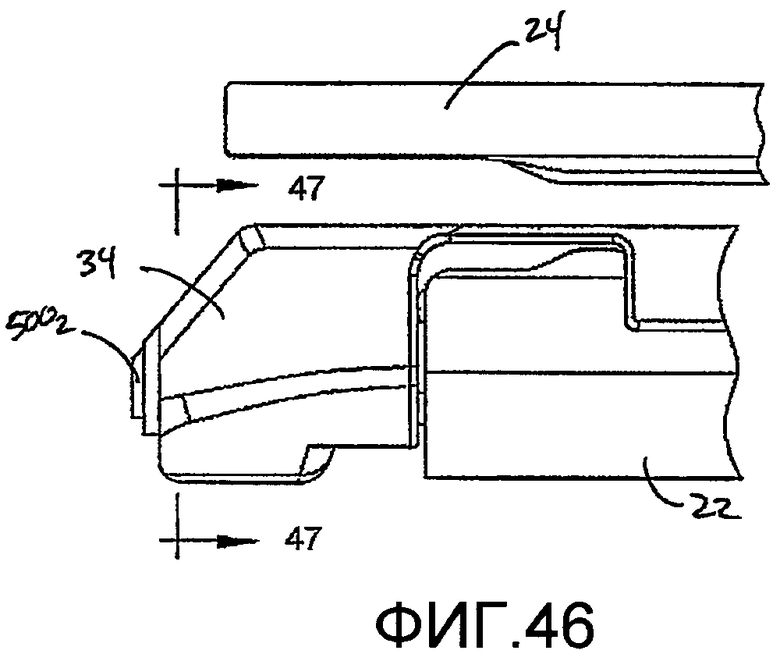
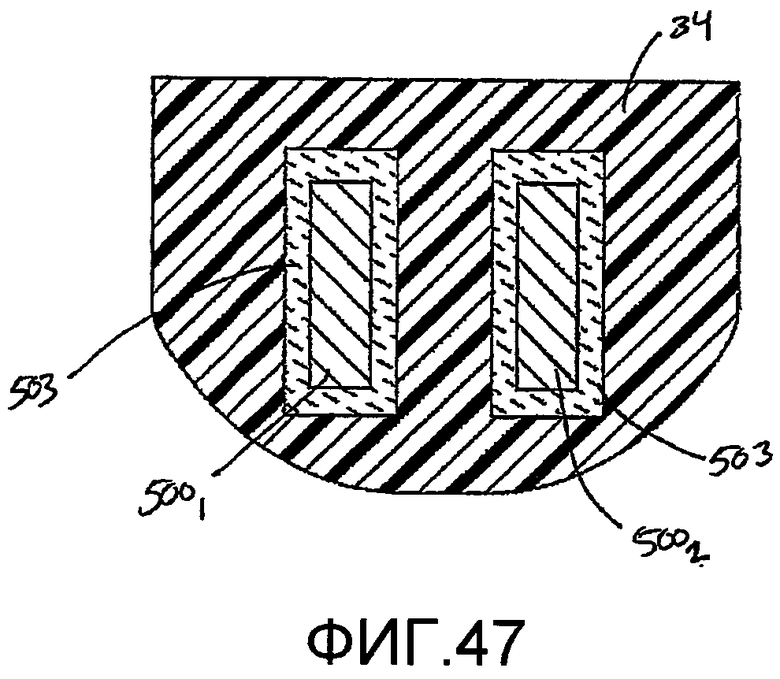
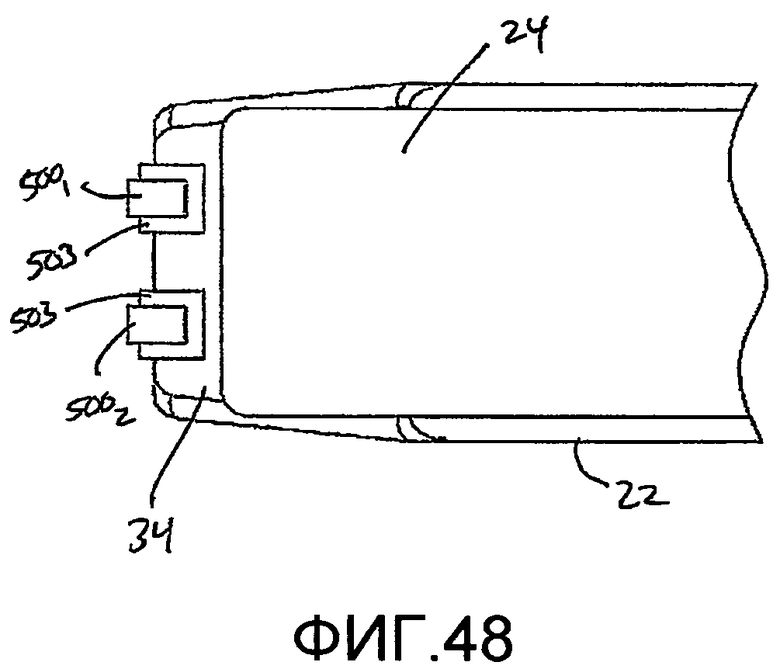
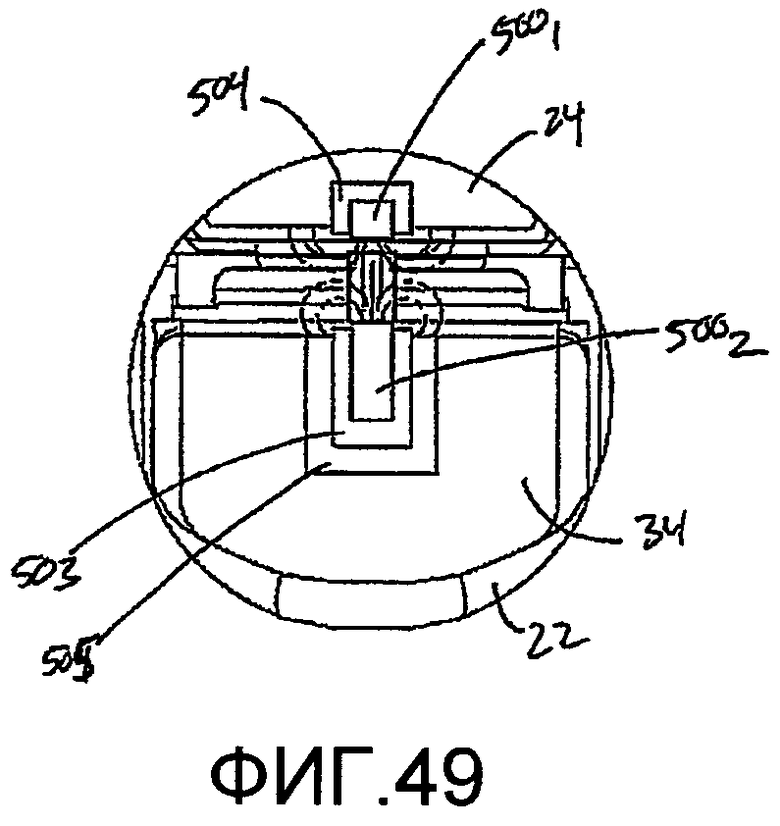
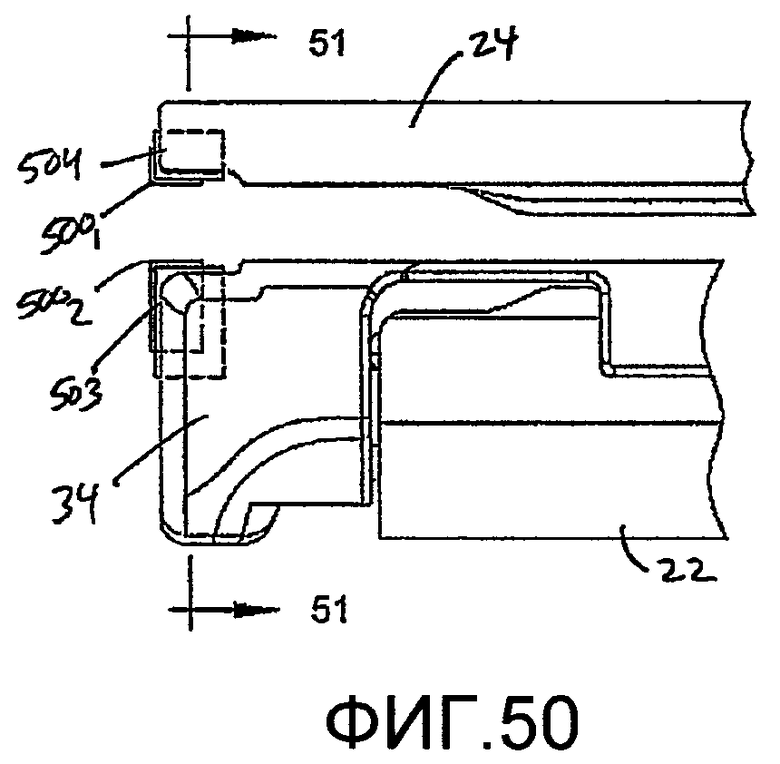
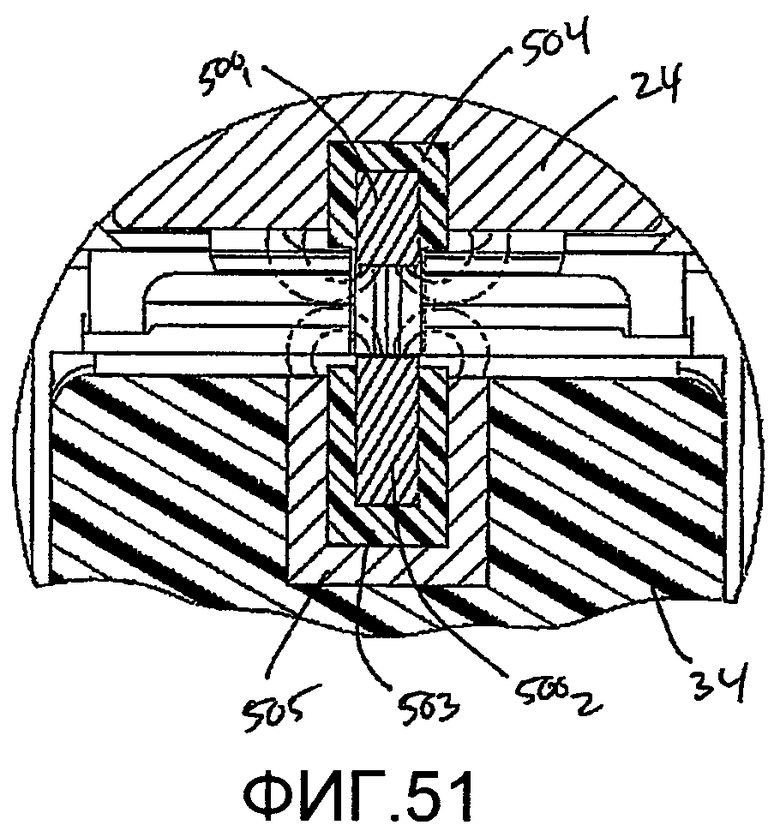
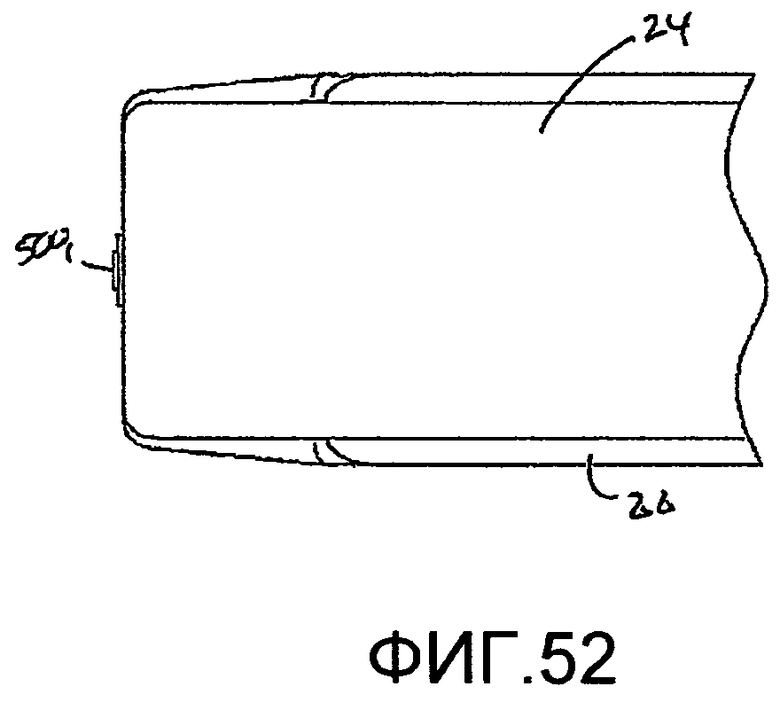
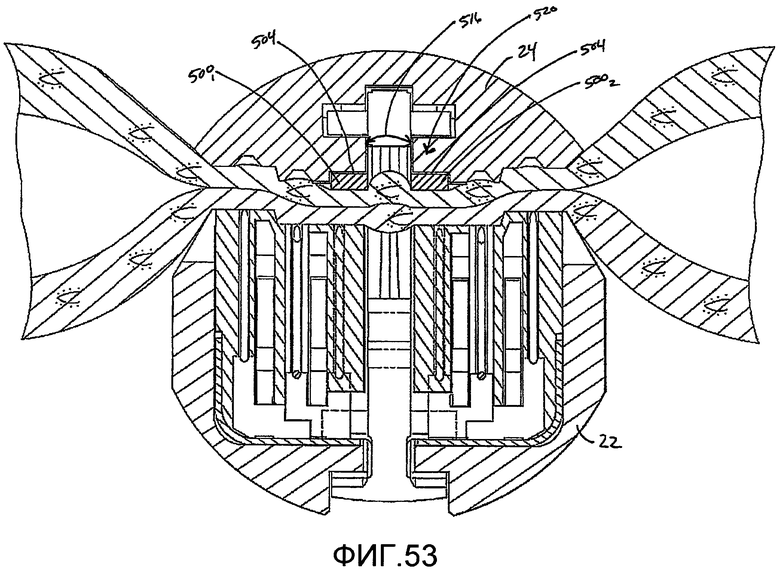
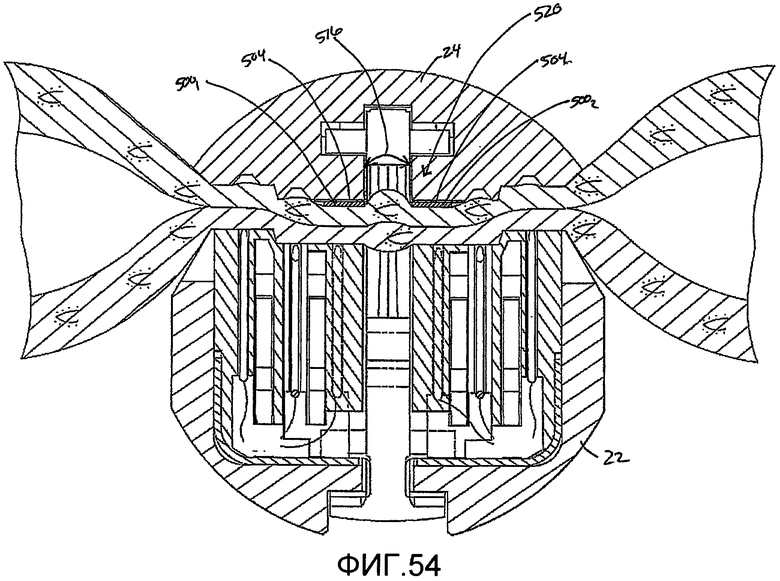
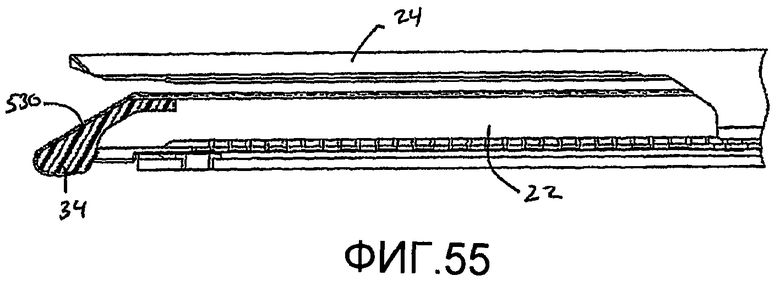
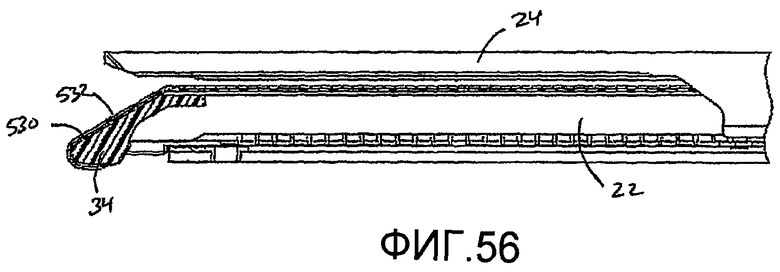
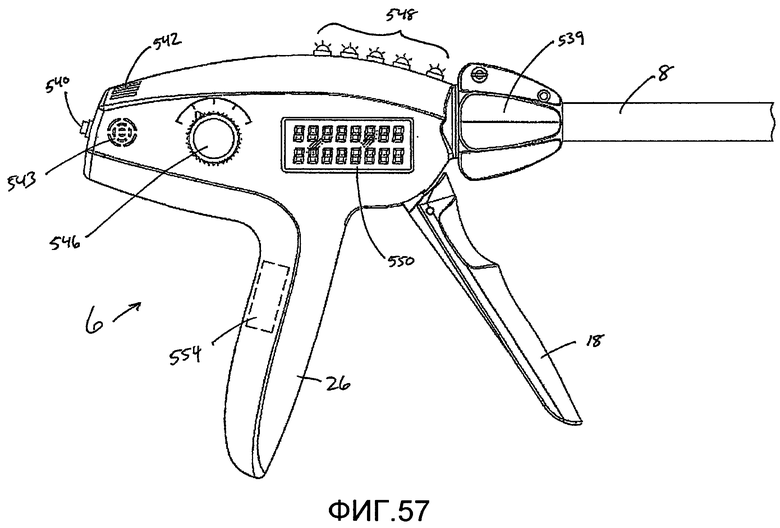
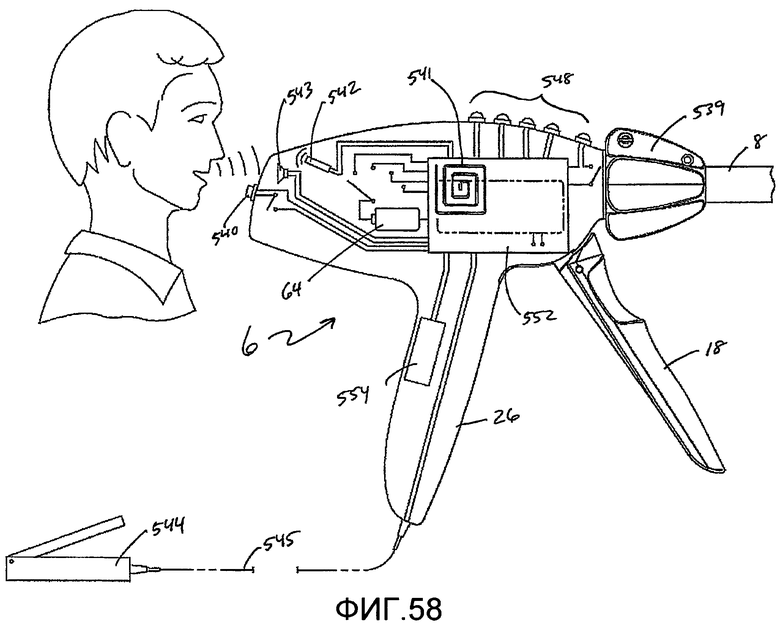
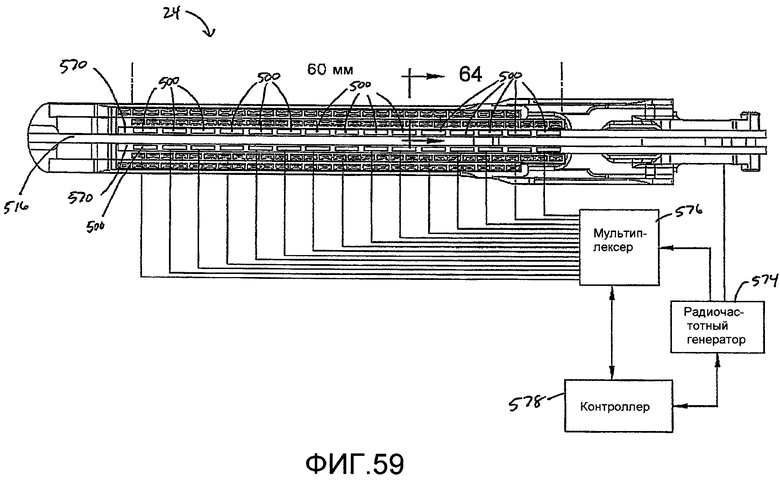
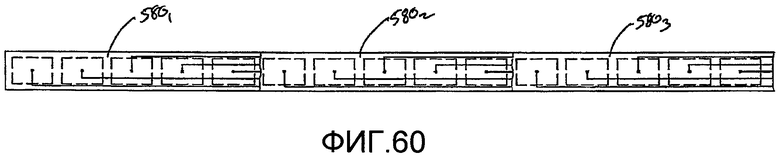
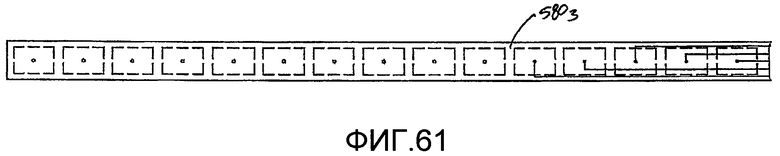
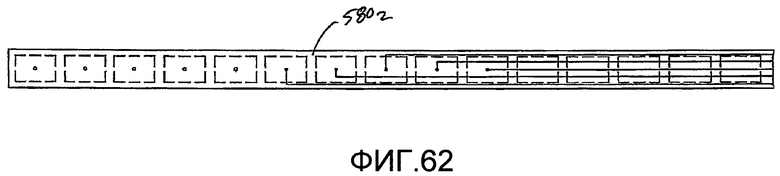

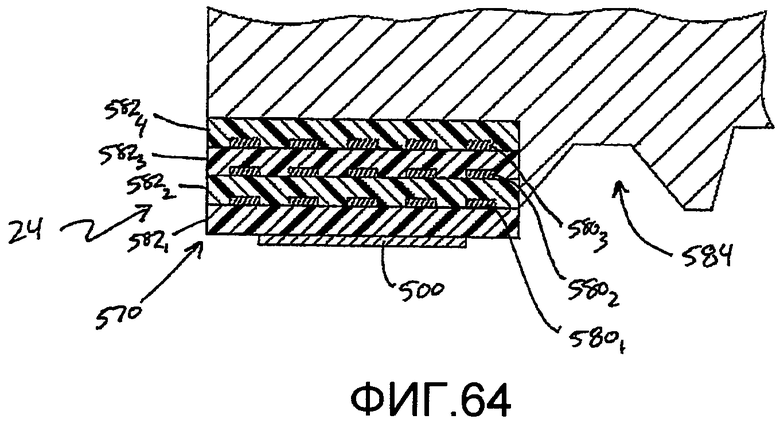
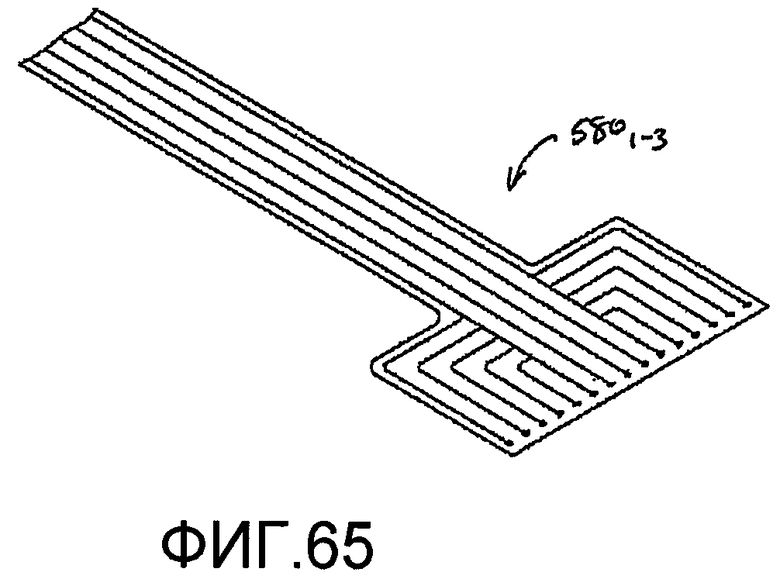
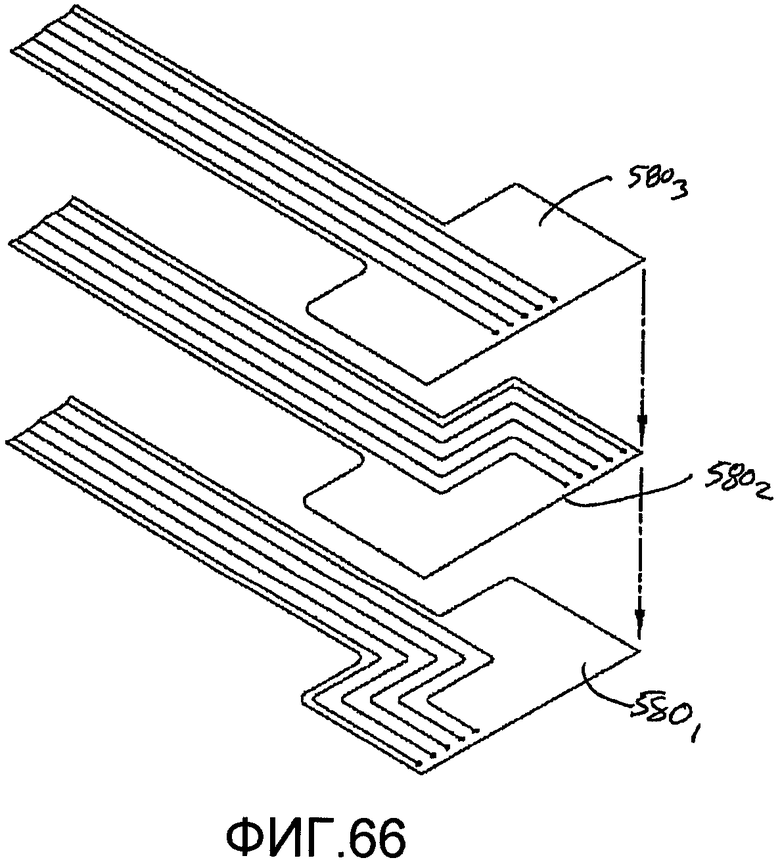
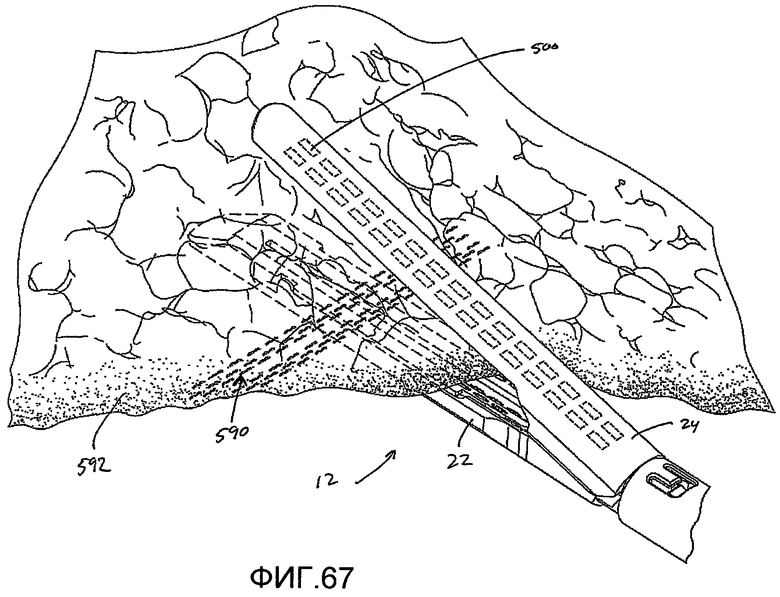
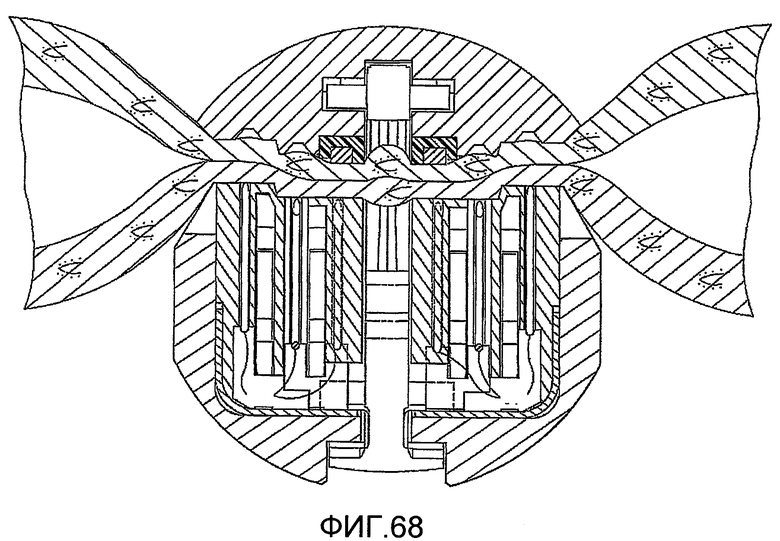
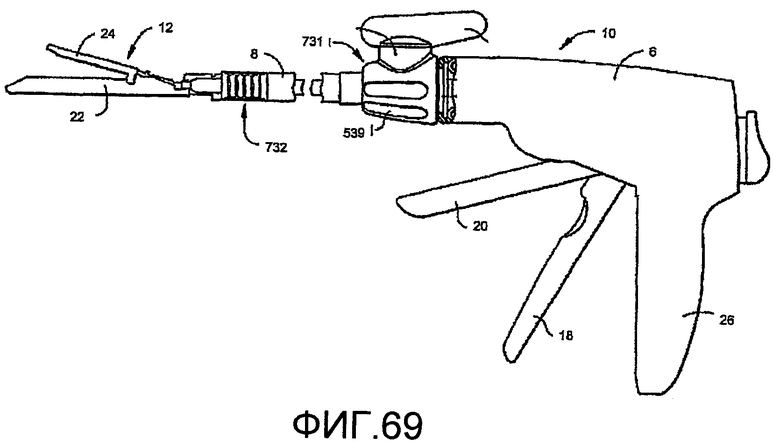
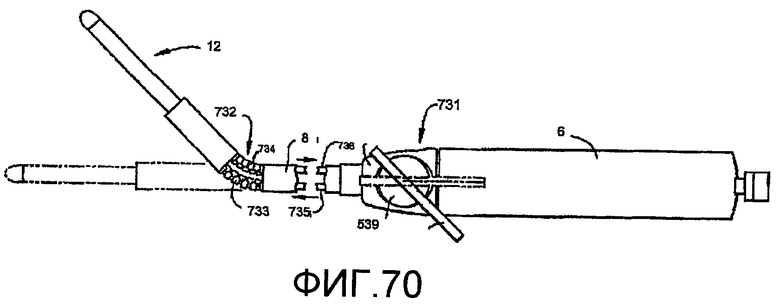
Изобретение относится к медицине. Хирургический инструмент для резания и скрепления содержит рабочий орган, вал, который соединен с рабочим органом, и рукоятку. Рукоятка соединена с валом и содержит электрический двигатель постоянного тока и блок питания. Двигатель соединен с цепью привода на валу для приведения в действие цепи привода. Блок питания, по меньшей мере, одно зарядо-аккумулирующее устройство. Зарядно-аккумулирующее устройство соединено с двигателем постоянного тока для приведения в действие двигателя постоянного тока. В результате оператор имеет возможность лучше управлять как скоростью, так и мощностью двигателя. 2 н. и 16 з.п. ф-лы, 70 ил.
1. Хирургический инструмент для резания и скрепления, содержащий:
рабочий орган;
вал, соединенный с рабочим органом, причем вал содержит цепь привода для приведения в действие рабочего органа; и
рукоятку, соединенную с валом, причем рукоятка содержит:
электрический двигатель постоянного тока, соединенный с цепью привода для приведения в действие цепи привода;
блок питания, который содержит, по меньшей мере, одно зарядоаккумулирующее устройство, соединенное с двигателем постоянного тока, для приведения в действие двигателя постоянного тока и, по меньшей мере, одну заменяемую батарею для зарядки, по меньшей мере, одного зарядоаккумулирующего устройства.
2. Хирургический инструмент для резания и скрепления по п.1, в котором, по меньшей мере, одно зарядоаккумулирующее устройство содержит множество последовательно соединенных зарядоаккумулирующих устройств.
3. Хирургический инструмент для резания и скрепления по п.2, в котором множество последовательно соединенных зарядоаккумулирующих устройств содержит множество последовательно соединенных суперконденсаторов.
4. Хирургический инструмент для резания и скрепления по п.2 или 3, в котором блок питания может сниматься с рукоятки.
5. Хирургический инструмент для резания и скрепления по п.1, в котором блок питания содержит схему управления зарядкой, соединенную с зарядоаккумулирующими устройствами, для определения уровня зарядки зарядоаккумулирующих устройств.
6. Хирургический инструмент для резания и скрепления по п.5, в котором схема управления зарядкой содержит:
память для хранения данных и
процессор, соединенный с памятью.
7. Хирургический инструмент для резания и скрепления по п.6, в котором память предназначена для хранения параметров, относящихся к блоку питания.
8. Хирургический инструмент для резания и скрепления по п.6, в котором память дополнительно предназначена для хранения значений RFID (радиочастотной идентификации) для компонентов инструмента и схема управления зарядкой дополнительно содержит ретранслятор RFID для считывания значений RFID.
9. Хирургический инструмент для резания и скрепления по п.8, в котором процессор запрограммирован с возможностью определять, является ли, по меньшей мере, один съемный компонент соответствующим для использования в инструменте, на основании значения RFID, по меньшей мере, одного съемного компонента инструмента, считанного ретранслятором RFID.
10. Хирургический инструмент для резания и скрепления по п.9, в котором процессор запрограммирован с возможностью предотвращать использование блока питания инструментом при определении того, что, по меньшей мере, один съемный компонент является несоответствующим для использования в инструменте.
11. Устройство, содержащее:
хирургический инструмент для резания и скрепления, содержащий:
рабочий орган;
вал, соединенный с рабочим органом, причем вал содержит цепь привода для приведения в действие рабочего органа; и
рукоятку, соединенную с валом, причем рукоятка содержит:
электрический двигатель постоянного тока, соединенный с цепью привода, для приведения в действие цепи привода;
съемный блок питания, который содержит, по меньшей мере, один заряжаемый источник питания постоянного тока, соединенный с двигателем постоянного тока, для приведения в действие двигателя постоянного тока и память блока питания для сохранения по меньшей мере одного рабочего параметра инструмента, причем по меньшей мере один рабочий параметр инструмента содержит количество выстреливаний инструментом; и
базу зарядного устройства, отдаленную от инструмента, для соединения со съемным блоком питания, когда съемный блок питания снимается с рукоятки, причем база зарядного устройства содержит источник питания для зарядки, по меньшей мере, одного заряжаемого источника питания постоянного тока блока питания; и память базы зарядного устройства для загрузки, по меньшей мере, одного рабочего параметра инструмента из памяти блока питания, когда съемный блок питания соединен с базой зарядного устройства.
12. Устройство по п.11, в котором источник питания базы зарядного устройства содержит источник питания с преобразованием переменного тока в постоянный ток.
13. Устройство по п.11, в котором источник питания базы зарядного устройства содержит, по меньшей мере, одну батарею.
14. Устройство по п.11, в котором, по меньшей мере, один заряжаемый источник питания постоянного тока блока питания содержит, по меньшей мере, одну перезаряжаемую батарею.
15. Устройство по п.11, в котором, по меньшей мере, один заряжаемый источник питания постоянного тока блока питания содержит, по меньшей мере, одно зарядоаккумулирующее устройство.
16. Устройство по п.15, в котором, по меньшей мере, одно зарядоаккумулирующее устройство содержит, по меньшей мере, один суперконденсатор.
17. Устройство по п.11, в котором блок питания содержит:
память для хранения данных и
процессор, соединенный с памятью.
18. Устройство по п.17, в котором съемный блок питания дополнительно содержит ретранслятор RFID для считывания значений RFID по меньшей мере одного съемного компонента инструмента и память блока питания связана с ретранслятором RFID хранения RFID значения, по меньшей мере, одного съемного компонента инструмента считанного ретранслятором RFID.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Скважинный расходомер | 1991 |
|
SU1813199A3 |
| EP 1854416 A1, 14.11.2007 | |||
| Хирургический аппарат для наложения компрессионных швов | 1979 |
|
SU1022703A1 |

