ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Хирургические инструменты с питанием от одной или нескольких батарей становятся все популярнее. К таким инструментам относятся различные электрические устройства, которые могут использоваться для разнообразных хирургических целей. Например, хирургические инструменты, работающие от батареи, могут включать устройства, работающие от двигателя (электрические скальпели, зажимы, сшивающие аппараты и т.п.) и/или устройства без двигателя (например, радиочастотные скальпели, коагуляторы, лазерные скальпели/коагуляторы, ультразвуковые скальпели/коагуляторы, и т.п.). В настоящее время инструменты, работающие от батареи, используются для различных типов хирургических вмешательств, в том числе, например, эндоскопических, лапароскопических, открытых и т.п.
В хирургических инструментах, работающих от батареи, часто используются первичные гальванические элементы, уже зараженные и часто рассчитанные на однократный разряд (т.е., однократное применение). Это позволяет избежать сложностей, связанных с повторной стерилизацией и зарядкой перезаряжаемых элементов питания. Однако использование первичных элементов питания связано с дополнительными сложностями, связанными с их перевозкой, хранением и утилизацией.
КРАТКОЕ ОПИСАНИЕ
Различные варианты осуществления изобретения могут относиться к хирургическому инструменту, имеющему концевой зажим и рукоятку, функционально соединенную с концевым зажимом. Рукоятка может включать спусковое устройство для приведения в действие концевого зажима, а также первую полость первой асимметричной формы в поперечном сечении и вторую полость второй асимметричной формы в поперечном сечении. Первый батарейный блок может располагаться в первой полости и иметь электрический контакт с, по меньшей мере, одной из следующих частей: рукояткой или концевым зажимом. Первый батарейный блок может включать:первый корпус с формой в поперечном сечении, соответствующий форме первой асимметричной в поперечном сечении полости, и первое множество ячеек, электрически соединенных друг с другом и расположенных в первом корпусе. Второй батарейный блок может располагаться во второй полости и иметь электрический контакт с, по меньшей мере, одной из следующих частей: рукояткой или концевым зажимом. Второй батарейный блок может содержать: второй корпус с формой в поперечном сечении, соответствующий форме второй асимметричной в поперечном сечении полости, и первое множество ячеек, электрически соединенных друг с другом и расположенных во втором корпусе.
Кроме того, различные варианты осуществления изобретения могут относиться к хирургической системе, содержащей батарейный блок. Батарейный блок может включать корпус и множество ячеек, расположенных в корпусе. По меньшей мере, часть множества ячеек может не иметь электрических контактов друг с другом. Батарейный блок может также включать первый переключатель, имеющий открытое и закрытое положение. В закрытом положении первый переключатель может быть электрически связан с множеством ячеек. Первый переключатель механически переводиться в открытое положение. Батарейный блок может дополнительно включать элементный коммутатор, имеющий открытое и закрытое положения. Элементный коммутатор может располагаться так, чтобы, находясь в закрытом положении, электрически соединять анод батарейного блока с катодом батарейного блока. Элементный коммутатор может механически смещаться в закрытое положение и может удерживаться в открытом положении частью корпуса.
В соответствии с различными вариантами осуществления, батарейный блок может содержать множество ячеек, по меньшей мере, часть из которых не имеет электрических контактов друг с другом. Батарейный блок может дополнительно содержать корпус, ограничивающий внутреннюю полость с, по меньшей мере, одной стенкой внутренней полости. По меньшей мере, одна внутренняя полость может включать первый электрод, электрически связанный с анодом батарейного блока, и второй электрод, электрически связанный с катодом батарейного блока. Батарейный блок может дополнительно содержать разряжающий разъем, расположенный во внутренней полости. Разряжающий разъем батареи может включать первый и второй контакты, электрически связанные друг с другом и с, по меньшей мере, одной стенкой внутренней полости. Разряжающий разъем батареи может располагаться в первом положении во внутренней полости, при этом первый и второй контакты электрически не связаны с первым и вторым электродами, и во втором положении, при этом первый контакт электрически связан с первым электродом, а второй контакт электрически связан со вторым электродом.
Кроме того, различные варианты осуществления изобретения могут относиться к хирургическому инструменту, имеющему концевой зажим, рукоятку, функционально соединенную с концевым зажимом, и батарейный блок. Рукоятка может включать спусковой механизм для приведения в действия концевого зажима и может определять границы полости. Батарейный блок может располагаться в полости и иметь электрический контакт с, по меньшей мере, одной из следующих частей: рукояткой или концевым механизмом. Кроме того, батарейный блок может включать корпус; множество ячеек; и подвижный лепесток. Подвижный лепесток может иметь первое положение, в котором он разделяет электрические контакты между, по меньшей мере, частью ячеек, и второе положение, в котором он не разделяет электрические контакты между множеством ячеек.
ЧЕРТЕЖИ
Особенности различных примеров осуществления изобретения указаны в прилагаемой формуле изобретения. Однако различные примеры осуществления изобретения с точки зрения как конструкции, так и способа функционирования будут понятнее из нижеследующего описания, представленного со ссылками на прилагаемые фигуры, указанные далее:
На фиг. 1 и 2 показаны соответствующие изображения одного из вариантов осуществления хирургического инструмента для рассечения и сшивания тканей;
На фиг. 3 показаны компоненты концевого зажима инструмента для рассечения и сшивания тканей, изображенного на фиг. 1 и 2, в соответствии с одним из вариантов осуществления изобретения.
На фиг.4 и 5 показаны компоненты концевого зажима и ствола хирургического инструмента для рассечения и сшивания тканей, изображенного на фиг. 1 и 2, в соответствии с одним из вариантов осуществления изобретения.
На фиг. 6 показан концевой зажим инструмента для рассечения и сшивания тканей, изображенного на фиг. 1 и 2, вид сбоку, в соответствии с одним из вариантов осуществления изобретения.
На фиг. 7 показана схема частей приводного эндоскопического режущего инструмента в соответствии с одним из вариантов осуществления изобретения. На фиг. 8 и 9 показано перспективное изображение части рукоятки эндоскопического режущего инструмента, показанного на фиг. 7, в соответствии с одним из вариантов осуществления изобретения.
На фиг. 10 показан вид сбоку рукоятки эндоскопического режущего инструмента, показанного на фиг. 7.
На фиг. 11 схематически показан один из вариантов осуществления электрической цепи хирургического инструмента для рассечения и сшивания тканей.
На фиг. 12 представлен вид сбоку одного из вариантов осуществления автоматического режущего инструмента, работающего от источника питания.
На фиг. 13 представлен вид сбоку рукоятки одного из вариантов осуществления автоматического режущего инструмента, работающего от источника питания.
На фиг. 14 и 15 показан блокирующий механизм закрывающего спускового устройства в соответствии одним из вариантов осуществления.
На фиг. 16 показан другой вариант осуществления блокирующего механизма закрывающего спускового устройства.
На фиг. 17-22 показан блокирующий механизм закрывающего спускового устройства в соответствии с другим вариантом осуществления.
На фиг. 23 A-B представлен универсальный шарнир (u-образный шарнир), который может быть использован в точке сочленения хирургического инструмента.
На фиг. 24 A-B представлен один из вариантов осуществления, торсионного провода, который может быть использован в точке сочленения хирургического инструмента.
На фиг. 25-31 изображен другой вариант осуществления автоматического двухтактного хирургического режущего и сшивающего инструмента, работающего от источника питания.
На фиг. 32-36 изображен другой вариант осуществления автоматического двухтактного хирургического режущего и сшивающего инструмента, работающего от источника питания.
На фиг. 37-40 показан один из вариантов осуществления автоматического режущего и сшивающего хирургического инструмента с такой системой тактильной позиционной обратной связи.
На фиг. 41 и 42 показано два состояния одного из вариантов осуществления датчика, который может использоваться в качестве датчика запуска двигателя.
На фиг. 43 показан один из вариантов осуществления хирургического инструмента, содержащего пару асимметричных батарейных блоков.
На фиг. 44 показан один из вариантов осуществления изобретения с расположением батарейного блока за пределами рукоятки хирургического инструмента, показанного на фиг. 43.
На фиг. 45 показан один из вариантов осуществления рукоятки хирургического инструмента, показанного на фиг. 43, с полостями, вмещающими батарейные блоки.
На фиг. 46 показан один из вариантов осуществления изобретения с батарейным блоком, показанным на фиг. 44, с контактами положительного и отрицательного электродов.
На фиг. 47 показан один из вариантов осуществления изобретения с батарейным блоком, показанным на фиг. 44, в сочетании с разряжающим разъемом.
На фиг. 48 показана схема одного из вариантов осуществления хирургического инструмента с батарейным блоком.
На фиг. 49 показан альтернативный вариант осуществления батарейного блока и хирургического инструмента, показанного на фиг. 48.
На фиг. 50 показан другой вариант осуществления батарейного блока, изображенного на фиг. 48.
На фиг. 51-53 показан один механический вариант осуществления батарейного блока со схемой, показанной на фиг. 48.
На фиг. 54-59 показан один механический вариант осуществления батарейного блока 800 со схемой, показанной на фиг. 48.
На фиг. 60 и 61 показан один из вариантов осуществления разряжающего разъема батареи, изображенной на фиг. 57-58, извлеченной из корпуса.
ОПИСАНИЕ
Различные варианты осуществления изобретения относятся к хирургическим инструментам, работающим от батареи, при этом батареи характеризуются свойствами, облегчающими их перевозку, хранение и утилизацию например, в соответствии с одним вариантом осуществления, набор батарей может включать множество ячеек, механически и электрически связанных друг с другом и расположенных в корпусе с асимметричной в сечении формой. Число и тип ячеек в корпусе можно подобрать таким образом, чтобы уменьшить мощность случайного разряда до уровня ниже порогового. Хирургический инструмент для использования с батарейным блоком может включать рукоятку со множеством полостей. Каждая полость может иметь асимметричную форму в поперечном сечении и, по меньшей мере, одна из полостей может иметь асимметричную форму в поперечном сечении, соответствующую форме батарейного блока. Дополнительная полость или полости могут вмещать дополнительные батарейные блоки. В соответствии с различными вариантами осуществления изобретения, группировка нескольких ячеек в одном корпусе позволяет снизить неудобства, связанные с индивидуальной зарядкой каждого из элементов в рукоятке. В то же время, ограничение числа ячеек, сгруппированных вместе, позволяет уменьшить риск для безопасности во время перевозки, хранения и утилизации.
В соответствии с различными вариантами осуществления изобретения, в хирургическом инструменте может использоваться один или более батарейных блоков, каждый из которых содержит множество ячеек, и, по меньшей мере, один переключатель для электрического соединения множества ячеек. Переключатель может иметь открытое положение, при котором ячейки имеют электрические контакты друг с другом. Переключатель может переводиться из открытого положения в закрытое положение, если в хирургический инструмент вставлен батарейный блок. Таким образом, питание хирургического инструмента может осуществляться множеством ячеек. Однако в то же время, батарейный блок можно перевозить при открытом положении переключателя для уменьшения количества доступной энергии на короткое время и, следовательно, снижения риска для безопасности во время перевозки, хранения и утилизации. В определенных вариантах осуществления изобретения описанные здесь батареи и ячейки могут иметь элементный коммутатор для соединения контактов батареи или ячейки с целью разряда батареи. Например, перед утилизацией элементный коммутатор может находиться в закрытом положении. Таким образом, батарея может быть разряжена перед утилизацией или вскоре после нее. Соответственно, это позволяет снизить риски для безопасности, связанные с утилизацией батареи.
Перед описанием вариантов осуществления ячеек, батарейных блоков и связанных с ними хирургических инструментов приводится подробное описание примерных вариантов осуществления хирургического инструмента, работающего от батареи. Хотя описанные здесь хирургические инструменты включают автоматические инструменты для рассечения и сшивания тканей, следует принимать во внимание, что описанные в настоящем документе конфигурации батарей могут использоваться с любым подходящим типом электрического хирургического инструмента, включая, например, электрические скальпели, зажимы, сшивающие инструменты, радиочастотные скальпели/коагуляторы, ультразвуковые скальпели/коагуляторы, лазерные скальпели/коагуляторы, и т.п.
На фиг. 1 и 2 представлено перспективное изображение одного из вариантов осуществления хирургического режущего и сшивающего инструмента 10. Представленный на иллюстрациях вариант осуществления является эндоскопическим инструментом и в целом отражает варианты осуществления инструмента 10, описанные в настоящем документе, который представляет собой режущие и сшивающие инструменты. Однако следует отметить, что, в соответствии с другими вариантами осуществления изобретения, инструмент может быть не эндоскопическим хирургическим режущим и сшивающим инструментом, например, инструментом для лапароскопических и открытых вмешательств.
Хирургический инструмент 10, изображенный на фиг. 1 и 2, содержит рукоятку 6, ствол 8 и шарнирный концевой зажим 12, соединенный со стволом 8 шарнирным сочленением 14. Рядом с рукояткой 6 может располагаться устройство управления шарнирным сочленением 16, обеспечивающее вращение концевого зажима 12 на шарнирном сочленении 14. В представленном варианте осуществления концевой зажим 12 выполнен в виде режущего эндоскопического инструмента, предназначенного для фиксации, рассечения и сшивания тканей, однако в других вариантах осуществления могут использоваться иные типы концевых зажимов, предназначенные для других типов хирургических манипуляций, такие, как зажимы, щипцы, рассекатели, клипсонакладыватели, устройства доступа, устройства для введения медикаментов/генной терапии, проведения ультразвуковых, радиочастотных или лазерных процедур и т.д.
Рукоятка 6 инструмента 10 может иметь закрывающее спусковое устройство 18 и спусковое устройство 20, приводящее в действие концевой зажим 12. Необходимо понимать, что инструменты с концевыми зажимами, предназначенные для выполнения различных хирургических манипуляций, могут иметь разное количество и типы спусковых устройств или иных соответствующих средств управления концевым зажимом 12. Концевой зажим 12 показан отдельно от рукоятки 6, рядом с предпочтительно удлиненным стволом 8. В одном из вариантов осуществления изобретения врач или оператор инструмента 10 может привести концевой зажим 12 в движение по отношению к стволу 8 с помощью элемента управления смыканием 16, как подробнее описано в ожидающей рассмотрения патентной заявке США № 11/329020, поданной 10, 2006, под названием "Хирургический инструмент со смыкающимся концевым зажимом", авторы Geoffrey C. Hueil et al., которая включена в настоящий документ посредством ссылки.
В приведенном примере концевой зажим 12, помимо прочего, имеет канал для скобок 22 и шарнирно перемещаемый зажимной элемент, например, упорную пластину 24, между которыми поддерживается расстояние, обеспечивающее эффективное сшивание скобками, а также рассечение ткани, захваченной концевым зажимом 12. Рукоятка 6 включает рукоятку в форме пистолета, к которой врач приводит спусковой рычаг 18 с шарнирным соединением, что приводит к закрытию или прижатию упорной пластины 24 к каналу для шовных скобок 22 концевого зажима 12, чтобы зажать ткань, расположенную между упорной пластиной 24 и каналом 22. Спусковое устройство 20 расположено снаружи относительно закрывающего спускового устройства 18. Как только закрывающее спусковое устройство 18 фиксируется в закрытом положении, как дополнительно описано ниже, спусковое устройство 20 может без усилий прижаться к пистолетной рукоятке 26, поэтому оператор может осуществлять такую манипуляцию одной рукой. Затем оператор может прижать спусковое устройство 20 к пистолетной рукоятке 26, осуществляя сшивание и рассечение ткани, зажатой в концевом зажиме 12. В других вариантах осуществления помимо упорной пластины 24 могут использоваться другие зажимные элементы, например, вторая бранша и т.д.
Необходимо принять во внимание, что термины «проксимальный» и «дистальный» используются в настоящем документе по отношению к хирургу, удерживающему рукоятку 6 инструмента 10. Так, концевой зажим 12 расположен дистально по отношению к рукоятке 6, расположенной более проксимально. Необходимо также принять во внимание, что для удобства и ясности такие пространственные термины как «вертикальный» и «горизонтальный» используются в настоящем документе по отношению к фигурам. Однако использование хирургических инструментов предполагает множество ориентаций и положений, поэтому указанные термины не являются абсолютными и не ограничивают настоящее изобретение.
При пользовании инструментом сначала можно нажимать на закрывающее спусковое устройство 18. Когда хирурга устраивает положение концевого зажима 12, он может оттянуть закрывающий спусковой крючок 18 в фиксированное положение полного закрытия, вплотную к пистолетной рукоятке 26. После этого может быть нажат спусковой крючок 20. Спусковое устройство 20 возвращается в открытое положение (как показано на фиг. 1 и 2), когда хирург устраняет давление, как более подробно описано ниже. Кнопка высвобождения 160 на рукоятке 6 и, в данном примере на пистолетной ручке 26, при нажатии может высвобождать заблокированное спусковое устройство 18.
На фиг. 3 показана схема частей концевого зажима в соответствии с одним из вариантов осуществления изобретения 12. Как показано на фигуре, концевой зажим 12, помимо ранее указанного желоба 22 и упорной пластины 24, может включать режущий инструмент 32, салазки 33, съемную кассету со скобами 34, установленный в канале 22, и винтовой вал 36. Режущий инструмент 32 может, например, являться скальпелем. Упорная пластина 24 может открываться и закрываться на шарнире 25, соединенном с проксимальным концом канала 22. Упорная пластина 24 также на проксимальном конце может иметь петлю 27, вставленную в часть механизма закрытия (описан ниже) для открывания и закрывания упорной пластины 24. Когда закрывающий спусковой крючок 18 приводится в действие, то есть отводится пользователем инструмента 10, упорная пластина 24 может поворачиваться шарниром 25 в фиксированное, или закрытое положение. Если фиксация концевого зажима 12 является удовлетворительной, оператор может привести в действие спусковое устройство 20, при этом, как более подробно описано ниже, скальпель 32 и салазки 33 перемещаются вдоль канала 22, рассекая ткани, зафиксированные концевым зажимом 12. В результате движения салазок 33 вдоль канала 22 скобки из кассеты 34 прошивают рассеченные ткани, упираясь в прижатую упорную пластину 24, которая формирует их, фиксируя ткани. В патентной заявке США 6978921, озаглавленной "Хирургический сшивающий инструмент, включающий механизм приведения в действия Е-beam", включенной в настоящий документ посредством ссылки, приводится более подробное описание двухтактных режущих и сшивающих инструментов. В соответствии с разными вариантами осуществления изобретения, салазки 33 могут представлять собой неотъемлемую часть кассеты 34, чтобы после вдвигания скальпеля после разреза салазки 33 не убирались.
Необходимо отметить, что, несмотря на то что в описанных в настоящем документе вариантах осуществления инструмента 10 используется концевой зажим 12, сшивающий скобками рассеченную ткань, в других вариантах осуществления могут использоваться другие способы стягивания или сшивания рассеченной ткани. Например, могут также применяться концевые зажимы, использующие для стягивания рассеченной ткани энергию радиоволн или клеящие вещества. В патентной заявке США 5810811, озаглавленной "Электрохирургическое гемостатическое устройство", включенной в настоящий документ посредством ссылки, описан режущий инструмент, в котором используется радиочастотная энергия для скрепления рассеченных тканей. В патентной заявке № 11/267811, озаглавленной “Хирургические сшивающие инструменты с функцией доставки лекарственных препаратов” и патентной заявке США 11/267383 под заглавием “Хирургические инструменты с функцией доставки лекарственных препаратов с помощью насоса”, обе из которых включены в настоящий документ посредством ссылок, описаны режущие инструменты, в которых используются адгезивные составы для скрепления рассеченных тканей. Соответственно, хотя приведенное здесь описание относится к операциям рассечения/сшивания и т.п., следует принимать во внимание, что это пример варианта осуществления, не ограничивающий изобретение. Могут также использоваться другие техники сшивания тканей.
На фиг. 4 и 5 показана схема частей, а на фиг. 6 - вид сбоку концевого зажима 12 и вала 8 в соответствии с одним из вариантов осуществления изобретения. Как показано в проиллюстрированном варианте осуществления, вал 8 может включать проксимальную закрывающую трубку 40 и дистальную закрывающую трубку 42, связанные шарнирным звеном 44. Дистальная закрывающая трубка 42 имеет отверстие 45, в которое вставляют язычок 27 на упорной пластине 24, чтобы открывать и закрывать упорную пластину 24, как более подробно описано ниже. Непосредственно внутри закрывающих трубок 40 и 42 может быть расположена сердцевинная трубка 46. Непосредственно внутри сердцевинной трубки 46 может быть расположен основной вращательный (или проксимальный) приводной вал 48, который соединяется со вспомогательным (или дистальным) приводным валом 50 с помощью комплекта конических зубчатых колес 52. Вспомогательный приводной вал 50 соединен с приводным механизмом 54, который приводит в действие проксимальный приводной механизм 56 винтового вала 36. Когда главный приводной ствол 48 вращается при приведении в действие спускового механизма 20 (как подробнее описано ниже), узел конической шестерни 52а-с вызывает вращение вторичного приводного вала 50, что, в свою очередь, приводит к зацеплению шестерен 54, 56 и вращению винтового вала 36, которое заставляет элемент 34, толкающий скальпель/салазки, двигаться в продольном направлении вдоль канала 22 и рассекать все ткани, зажатые в концевом зажиме 12. Вертикальная коническая шестерня 52b может находиться и поворачиваться в отверстии 57 на дистальном конце проксимальной сердцевинной трубки 46. В дистальную сердцевинную трубку 58 могут быть вставлены вспомогательный приводной вал 50 и приводные механизмы 54 и 56. В целом, главный приводной вал 48, вспомогательный приводной вал 50 и узел шарнирного соединения (в частности, узел конической шестерни 52a-c) в данном документе иногда называются "узлом главного приводного вала"
Подшипник 38 имеет резьбу, соответствующую винтовому приводному валу 36. Кроме того, подшипник 36 соединен со скальпелем 32. При вращении винтового вала 36 вперед подшипник 38 передвигает винтовой приводной вал 36 в дистальном направлении, заставляя двигаться режущий инструмент 32 и, в последующем, салазки 33 с целью операции рассечения/ сшивания. Салазки 33 могут быть выполнены, например, из пластика и могут иметь наклонную дистальную поверхность. По мере движения салазок 33 через канал 22 поверхность с уклоном вперед может подталкивать или приводить в движение скобки в кассете со скобками 34 через захваченную зажимом ткань с упором об упорную пластину 24. Упорная пластина 24 сгибает скобы, скрепляя таким образом рассеченные ткани. Когда скальпель 32 втянут, скальпель 32 и салазки 33 могут разъединяться, при этом салазки 33 остаются на дистальном конце желоба 22.
В связи с невозможностью отследить ход операции рассечения/сшивания большинство врачей не приемлет автоматические хирургические инструменты, в которых операция рассечения/сшивания производится простым нажатием кнопки. В противоположность этому, существуют различные варианты осуществления автоматических эндоскопических режущих инструментов, позволяющих отследить состояние, силу и/или положение режущего инструмента в концевом зажиме.
На фиг. 7-10 показан один из вариантов осуществления автоматического эндоскопического режущего инструмента, в частности, его рукоятки 6, позволяющий отслеживать размещение и силу нагрузки режущего инструмента и концевого зажима. Кроме того, данный вариант осуществления может использовать силу, приложенную пользователем во время нажатия спускового устройства 20, для увеличения производительности устройства (так называемый «усиленный режим»). Как показано в проиллюстрированном варианте осуществления, рукоятка 6 включает детали внешней нижней стороны 59, 60 и детали внешней верхней стороны 61, 62, которые вплотную прилегают друг к другу, формируя внешнюю часть рукоятки 6. Часть пистолетной рукоятки 26 рукоятки 6 может быть оснащена батареей 64, например, литий-ионной батареей. Хотя на фигуре показана батарея 64 с одним элементом, следует принимать во внимание, что в некоторых вариантах осуществления батарея 64 может включать множество соединенных друг с другом ячеек. Батарея 64 может приводить в движение мотор 65, расположенной в верхней части пистолетной части 26 рукоятки 6. Согласно различным вариантам осуществления, двигатель 65 может быть приводным щеточным двигателем постоянного тока с максимальной скоростью вращения приблизительно 5000 оборотов в минуту. Двигатель 65 может приводить в движение блок 90° конических зубчатых колес 66, содержащий первое коническое зубчатое колесо 68 и второе коническое зубчатое колесо 70. Блок конических зубчатых колес 66 может приводить в действие блок планетарных шестерен 72. Блок планетарных шестерен 72 может включать ведущую шестерню 74, соединенную с приводным валом 76. Ведущая шестерня 74 может приводить в действие сопряженное кольцевое зубчатое колесо 78, которое через приводной вал 82 приводит в действие барабан с винтовым зубчатым колесом 80. Кольцо 84 может быть навинчено на барабан с винтовым зубчатым колесом 80. Таким образом, при вращении двигателя 65 кольцо 84 двигается вдоль барабана с винтовым зубчатым колесом 80 с помощью установленного блока конических зубчатых колес 66, блока планетарных шестерней 72 и кольцевого зубчатого колеса 78.
Рукоятка 6 может также включать датчик пуска двигателя 110 в сочетании со спусковым механизмом 20, чтобы оператор мог видеть, приведен ли в действие спусковой механизм 20 (или "прижат" ли он) по отношению к пистолетной части 26 рукоятки 6, чтобы начать операцию рассечения/сшивания концевым зажимом 12. Датчик 110 может представлять собой пропорциональный датчик, например, реостат или резистор переменного сопротивления. Когда спусковое устройство 20 находится в прижатом состоянии, датчик 110 определяет движение и направляет электрический сигнал, указывающий на необходимость подачи электрического напряжения (или питания) к двигателю 65. Если датчик 110 является резистором переменного сопротивления или аналогичным устройством, вращение двигателя 65 может быть, как правило, пропорционально величине смещения спускового устройства 20. Таким образом, когда оператор слегка прижимает или закрывает спусковое устройство 20, двигатель 65 вращается сравнительно медленно. Когда спусковое устройство 20 полностью прижато (или находится в полностью закрытом положении), вращение двигателя 65 максимально. То есть, чем сильнее пользователь прижимает спусковое устройство 20, тем большее напряжение подается на двигатель 65, обеспечивая большую скорость вращения.
Рукоятка 6 может включать срединную часть рукоятки 104, примыкающую к верхней части спускового устройства 20. Рукоятка 6 также может содержать смещающую пружину 112, расположенную между опорами на срединной части рукоятки 104 и спусковом устройстве 20. Смещающая пружина 112 может смещать спусковое устройство 20 в полностью открытое положение. Таким образом, когда оператор разблокирует спусковое устройство 20, смещающая пружина 112 переводит спусковое устройство 20 в открытое положение, тем самым предупреждая срабатывание датчика 110, что приводит к остановке двигателя 65. Кроме того, благодаря наличию смещающей пружины 112, каждый раз, когда пользователь закрывает спусковое устройство 20, он чувствует сопротивление, что позволяет контролировать скорость вращения двигателя 65. Также оператор может прекратить воздействие на спусковое устройство 20 и тем самым прекратить воздействие на датчик 100 и остановить двигатель 65. Таким образом, пользователь может остановить работу концевого зажима 12, что позволяет обеспечить возможность управления оператором операции по рассечению/сшиванию.
Дистальный конец барабана с винтовым зубчатым колесом 80 включает дистальный приводной вал 120, который приводит в действие кольцевое зубчатое колесо 122, сопрягающееся с ведущей шестерней 124. Ведущая шестерня 124 соединяется с основным приводным валом 48 блока основного приводного вала. Таким образом, вращение двигателя 65 вызывает вращение группы основного приводного вала, что приводит в действие концевой зажим 12, как описано выше.
Кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, может включать опору 86, которая установлена в прорезь 88 кулисы 90. В кулисе 90 имеется отверстие 92 на противоположном конце 94, в которое вставляется шарнирный штифт 96, расположенный между деталями внешних сторон рукоятки 59 и 60. Шарнирный штифт 96 также проходит через отверстие 100 в спусковом устройстве 20 и отверстие 102 в срединной части рукоятки 104.
Кроме того, рукоятка 6 может включать датчик обратного действия (или датчик завершения хода) 130 и датчик остановки двигателя (или начала хода) 142. В различных вариантах осуществления датчик обратного действия 130 может являться концевым переключателем, расположенным на дистальном конце барабана с винтовым зубчатым колесом 80, при этом кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, контактирует с датчиком обратного действия 130 и включает его, когда кольцо 84 достигает дистального конца барабана с винтовым зубчатым колесом 80. При активации датчик обратного действия 130 направляет сигнал на двигатель 65 об изменении направления его вращения и, после рассечения, втягивании скальпеля 32 концевого зажима 12.
Датчик останова двигателя 142 может являться, например, нормально замкнутым концевым выключателем. В различных вариантах осуществления он может располагаться на проксимальном конце барабана с винтовым зубчатым колесом 80, при этом кольцо 84 переключает выключатель 142, когда кольцо 84 достигает проксимального конца барабана с винтовым зубчатым колесом 80.
При операции, когда оператор инструмента 10 нажимает спусковой механизм 20, датчик 110 воспринимает местоположение спускового механизма 20 и посылает сигнал к двигателю 65, вызывая его вращение в прямом направлении. например, со скоростью, пропорциональной силе нажатия спускового механизма 20 оператором. Вращение двигателя вправо 65, в свою очередь, вызывает вращение кольцевого зубчатого колеса 78 на дистальном конце блока планетарных шестерней 72, тем самым активируя вращение барабана с винтовым зубчатым колесом 80 и продвижение в дистальном направлении кольца 84, навинченного на барабан с винтовым зубчатым колесом 80, вдоль барабана с винтовым зубчатым колесом 80. Вращение барабана с винтовым зубчатым колесом 80 также приводит в действие блок основного приводного вала, как описано выше, что, в свою очередь, приводит в рабочее положение скальпель 32 на концевом зажиме 12, то есть скальпель 32 и салазки 33 проходят вдоль канала 22, при этом рассекается ткань, захваченная концевым зажимом 12. Кроме того, в вариантах осуществления изобретения, в которых используется концевой зажим для наложения скобок, концевой зажим 12 используется для скрепления тканей скобками.
К моменту завершения манипуляции концевого зажима 12 по рассечению/сшиванию ткани кольцо 84 на барабане с винтовым зубчатым колесом 80 достигает дистального конца барабана 80, вызывая включение датчика обратного хода двигателя 130, который направляет сигнал двигателю 65 об изменении направления вращения. Это, в свою очередь, вызывает втягивание скальпеля 32 и вынуждает кольцо 84 на барабане с винтовым зубчатым колесом 80 двигаться в обратном направлении к проксимальному кольцу барабана с винтовым зубчатым колесом 80.
Срединная часть рукоятки 104 включает тыльное плечо 106, которое зацепляется за кулису 90, что наилучшим образом показано на фиг. 8 и 9. Срединная часть рукоятки 104 также имеет ограничитель рабочего хода 107, сцепленный с спусковым устройством 20. Движение кулисы 90 управляется вращением двигателя 65, как описано выше. Когда кулиса 90 вращается против часовой стрелки и кольцо 84 перемещается с проксимального конца спирального зубчатого колеса 80 к дистальному концу, срединная часть рукоятки 104 может свободно вращаться против часовой стрелки. Таким образом, когда пользователь прижимает спусковой механизм 20, спусковой механизм 20 зацепляется с упором 107 поступательного движения в средней части рукоятки 104, заставляя среднюю часть рукоятки 104 вращаться против часовой стрелки. Однако за счет зацепления заднего плеча 106 с кулисой 90 средняя часть рукоятки 104 способна вращаться против часовой стрелки лишь настолько, насколько позволяет кулиса 90. Таким образом, если двигатель 65 остановится по какой-либо причине, кулиса 90 прекратит вращаться и пользователь не сможет прижать спусковой механизм 20 дальше, так как средняя часть рукоятки 104 не сможет свободно вращаться против часовой стрелки из-за кулисы 90.
На фиг. 41 и 42 показано два состояния одного из вариантов осуществления датчика для контроля изменения параметров, который может использоваться в качестве датчика работы двигателя 110. Датчик 110 может включать торцевую часть 280, первый электрод А 282, второй электрод (В) 284 и сжимаемый диэлектрический материал 286 (например, EAP) между электродами 282, 284. Датчик 110 может быть установлен так, чтобы торцевая часть 280 контактировала с спусковым устройством 20, когда оно притянуто. Соответственно, когда спусковое устройство 20 притянуто, диэлектрический материал 286 сжимается, как показано на фиг. 42, таким образом, что электроды 282 и 284 сближаются. Так как расстояние b между электродами 282 и 284 напрямую соотносится с полным сопротивлением между электродами 282 и 284, то очевидно, что чем больше расстояние, тем больше полное сопротивление, и чем меньше расстояние, тем меньше полное сопротивление. Таким образом, степень сжатия диэлектрического материала 286 20 из-за втягивания спускового механизма 20 (обозначенная как сила “F” на фиг. 42) пропорциональна полному сопротивлению между электродами 282, 284, которое может использоваться для пропорционального контроля двигателя 65.
Компоненты примерной системы закрывания (или зажатия) упорной пластины 24 концевого зажима 12 при втягивании спускового механизма зажатия 18 также показаны на фиг. 7-10. В показанном на иллюстрации варианте осуществления изобретения система закрывания включает хомутик 250, соединенный с закрывающим спусковым устройство 18 штырем 251, который вставляется через совмещенные отверстия в спусковом устройстве 18 и хомутике 250. Шарнирный штифт 252, вокруг которого поворачивается закрывающее спусковое устройство 18, проходит через другое отверстие в закрывающем спусковом устройстве 18, которое смещено относительно места, в котором штифт 251 проходит через закрывающее спусковое устройство 18. Таким образом, втягивание зажимающего спускового устройства 18 заставляет верхнюю часть закрывающего спускового устройства 18, к которому присоединен хомутик 250 с помощью штыря 251, вращаться против часовой стрелки. Дистальный конец вилки сцепления 250 соединен с помощью штифта 254 с первым закрывающим кронштейном 256. Первый закрывающий кронштейн 256 соединен со вторым закрывающим кронштейном 258. Вместе закрывающие кронштейны 256 и 258 определяют отверстие, в которое вставлен и удерживается проксимальный конец проксимальной закрывающей трубки 40 (см. фиг. 4), при этом продольное движение закрывающих кронштейнов 256 и 258 вызывает продольное перемещение проксимальной закрывающей трубки 40. Инструмент 10 также включает закрывающий стержень 260, установленный внутри проксимальной закрывающей трубки 40. Закрывающий стержень 260 может включать окно 261, в которое вставляется опора 263 на одной из деталей внешних сторон рукоятки, такой как деталь внешней нижней стороны 59 в приведенном варианте осуществления, жестко связывая закрывающий стержень 260 с рукояткой 6. Таким образом, проксимальная закрывающая трубка 40 способна перемещаться продольно по отношению к закрывающему стержню 260. Закрывающий стержень 260 может также включать дистальный буртик 267, который прилегает к полости 269 в проксимальной сердцевинной трубке 46 и удерживается заглушкой 271 (см. фиг. 4).
Во время операции, когда хомутик 250 вращается из-за прижатия спускового устройства 18, закрывающие кронштейны 256, 258 заставляют закрывающую трубку, находящуюся в непосредственной близости, двигаться в дистальном направлении (т.е., от рукоятки инструмента 10), что приводит к тому, что дистальная закрывающая трубка 42 движется дистально, вызывая вращение упорной пластины 24 вокруг шарнирной точки 25 и ее приведение в зажатое или закрытое положение. Когда закрывающее спусковое устройство 18 разблокировано, находящаяся в непосредственной близости закрывающая трубка 40 скользит в проксимальном направлении, что вызывает закрытие дистальной закрывающей трубки 42, которая, за счет выступа 27 входит в окно 45 дистальной закрывающей трубки 42, заставляя упорную пластину 24 вращаться вокруг шарнирного участка 25, переходя в открытое незажатое положение. Таким образом, притягивая и блокируя закрывающее спусковое устройство 18, оператор может зажимать ткань между упорной пластиной 24 и желобом 22, а также освобождать ее после рассечения/сшивания, вернув закрывающее спусковое устройство 18 из закрытого положения.
На фиг. 11 схематически показан один из вариантов осуществления электрической цепи инструмента 10. Когда оператор начинает тянуть за спусковое устройство 20 после блокировки закрывающего спускового устройства 18, активируется датчик 110, открывая путь току. Если в обычном состоянии открытый переключатель датчика обратного действия 130 открыт (что означает, что конец хода концевого зажима не был достигнут), ток будет протекать по направлению к однополюсному реле на два направления 132. Так как переключатель датчика обратного хода двигателя 130 не закрыт, на спираль 134 реле 132 не будет подаваться питание, таким образом, реле 132 будет оставаться в неактивном состоянии. Цепь включает также переключатель датчика блокировки кассеты 136. Если концевой зажим 12 включает кассету со скобками 34, переключатель датчика 136 будет находиться в закрытом положении, позволяя протекание тока. В противном случае, если концевой зажим 12 не содержит кассету со скобками 34, переключатель датчика 136 будет находиться в открытом положении, тем самым препятствуя питанию мотора 65 от батареи 64.
Когда присутствует кассета со скобками 34, выключатель датчика 136 находится в закрытом положении, поэтому питание подается на один полюс, однопозиционное реле 138. Когда реле 138 находится в возбужденном состоянии, ток протекает через датчик 138 и датчик резистора переменного сопротивления 110 к двигателю 65 через двухполюсное реле на два направления 140, таким образом питая двигатель 65 и позволяя ему вращаться в прямом направлении.
Когда концевой зажим 12 достигает конца хода, активируется датчик обратного действия 130, замыкая переключатель 130 и пропуская ток к реле 132. Это приводит к тому, что реле 132 оказывается под напряжением (не показано на фиг. 11), поэтому ток идет в обход переключателя датчика блокировки кассеты 136 и переменного резистора 110 к в норме замкнутому двухполюсному двухпозиционному реле 140 и назад к мотору 65, однако через реле 140, из-за чего направление вращения мотора 65 меняется на противоположное.
Так как переключатель датчика остановки мотора 142 в норме закрыт, ток течет назад к реле 132, которое остается под напряжением до перехода переключателя 142 в открытое положение. Когда скальпель 32 полностью втянут, переключатель датчика останова двигателя 142 активируется и открывается, прекращая тем самым подачу питания на двигатель 65.
В других вариантах осуществления вместо пропорционального датчика 110 может использоваться двухпозиционный датчик. В таких вариантах осуществления скорость вращения двигателя 65 может не быть пропорциональной силе, приложенной оператором. Как правило, двигатель 65 может вращаться в целом с постоянной скоростью. Тем не менее оператор получает обратную связь относительно усилия, так как спусковое устройство 20 включено в цепь зубчатых передач привода.
На фиг. 12 представлен вид сбоку рукоятки 6 хирургического инструмента с усиленным автоматическим эндокатером согласно другому варианту осуществления. Вариант осуществления, показанный на фиг. 12, сходен с показанным на фиг. 7-10, за исключением того, что в варианте осуществления на фиг. 12 кулиса 90 соединена с кольцом 84, навинченным на спиральное зубчатое колесо 80. Вместо этого в варианте осуществления, представленном на фиг. 12, кольцо 84 включает часть с датчиком 114, которая перемещается с кольцом 84, когда кольцо 84 продвигается вперед (и назад) по барабану с винтовым зубчатым колесом 80. Часть с датчиком 114 включает выемку 116. Датчик обратного действия 130 может быть расположен на дистальном конце выемки 116, и датчик останова двигателя 142 может быть расположен на проксимальном конце выемки 116. Когда кольцо 84 продвигается вперед (и назад) по барабану с винтовым зубчатым колесом 80, часть с датчиком 114 продвигается вместе с ним. Кроме того, как показано на фиг. 12, срединная часть 104 может иметь плечо 118, которое входит в выемку 116.
Во время работы, когда оператор инструмента 10 прижимает спусковое устройство 20 к пистолетной рукоятке 26, датчик пуска двигателя 110 определяет движение и направляет сигнал к началу работы двигателю 65, что вызывает, помимо прочего, вращение барабана с винтовым зубчатым колесом 80. Когда барабан с винтовым зубчатым колесом 80 вращается, кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, продвигается в прямом направлении (или в обратном, в зависимости от направления вращения). Кроме того, за счет втягивания спускового устройства 20, срединная часть 104 заставляет спусковой механизм 20 вращаться против часовой стрелки за счет поступательного движения упора 107, зацепляющегося с спусковым механизмом 20. Вращение срединной части 104 против часовой стрелки заставляет плечо 118 вращаться против часовой стрелки вместе с частью датчика 114 кольца 84 таким образом, что плечо 118 остается в углублении 116. Когда кольцо 84 достигает дистального конца барабана с винтовым зубчатым колесом 80, плечо 118 контактирует с датчиком обратного действия 130 и тем самым активирует его. Сходным образом, когда кольцо 84 достигает проксимального конца винтового зубчатого колеса 142, плечо 118 приходит в контакт и в последующем зацепляет датчик остановки мотора 142. Такие действия могут обратить направление движения и остановить мотор 65, соответственно, как описано выше.
На фиг. 13 представлен вид сбоку рукоятки 6 с усиленным автоматическим эндокатером согласно другому варианту осуществления. Вариант осуществления, представленный на фиг. 13, аналогичен варианту осуществления, представленному на фиг. 7-10, за исключением того, что в варианте осуществления, представленном на фиг. 13, кулиса 90 не имеет прорези. Вместо этого кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, имеет вертикальный канал 126. Вместо прорези кулиса 90 имеет опору 128, которая расположена в канале 126. Когда барабан с винтовым зубчатым колесом 80 вращается, кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, продвигается в прямом направлении (или в обратном, в зависимости от направления вращения). Кулиса 90 вращается против часовой стрелки по мере приближения кольца 84 за счет расположения упора 128 в канале 126, как показано на фиг. 13.
Как было указано выше, при использовании двухтактного автоматического инструмента оператор сначала притягивает и блокирует закрывающее спусковое устройство 18. На фиг. 14 и 15 показан один из вариантов осуществления механизма блокировки закрывающего спускового механизма 18 с целью блокировки закрывающего спускового механизма 18 в части пистолетной рукоятки 26 рукоятки 6. В показанном на фиг. варианте осуществления изобретения часть пистолетной рукоятки 26 включает крючок 150, отклоняющийся против часовой стрелки вокруг шарнирного участка 151 под действием торсионной пружины 152. Закрывающее спусковое устройство 18 также включает запирающую пластину 154. По мере того, как оператор сжимает закрывающий спусковой механизм 18, запирающая пластина 154 упирается в скошенную часть 156 крючка 150, тем самым заставляя крючок 150 поворачиваться вверх (по часовой стрелке на фиг. 14-15) до тех пор, пока запирающая пластина 154 полностью не перейдет через скошенную часть 156 в вырезку 158 на крючке 150, что блокирует закрывающий спусковой механизм 18 на месте. Оператор может разблокировать закрывающее спусковое устройство 18, сдвигая вниз скользящую спусковую кнопку 160 на задней или противоположной стороне пистолетной рукоятки 26. При опускании вниз скользящей кнопки 160 крюк 150 поворачивается по часовой стрелке таким образом, что запирающая пластина 156 высвобождается из вырезки 158.
На фиг. 16 показан другой механизм фиксации закрывающего спускового устройства в соответствии с различными вариантами осуществления. В варианте осуществления, представленном на фиг. 16, закрывающее спусковое устройство 18 включает клин 160, имеющий стреловидную часть 161, Стреловидная часть 161 смещается вниз (или по часовой стрелке) под действием пластинчатой пружины 162. Клин 160 и пластинчатая пружина 162 могут быть выполнены, например, из формованного пластика. Когда закрывающее спусковое устройство 18 притянуто, стреловидная часть 161 вставлена в отверстие 164 в пистолетной рукоятке 26 рукоятки 6. Нижняя скошенная поверхность 166 стреловидной части 161 зацепляет нижнюю часть боковой стенки 168 отверстия 164, заставляя стреловидную часть 161 вращаться против часовой стрелки. В конечном итоге нижняя скошенная поверхность 166 полностью переходит через нижнюю часть боковой стенки 168, поэтому сила, заставляющая стреловидную часть 161 вращаться против часовой стрелки, исчезает, что приводит к соскальзыванию нижней части боковой стенки 168 в фиксированное положение в вырезке 170 позади стреловидной части 161.
Чтобы разблокировать закрывающий спусковой механизм 18, пользователь нажимает кнопки 172 на противоположной стороне спускового механизма 18, что заставляет стреловидную часть 161 вращаться против часовой стрелки и позволяет стреловидной части 164 выскользнуть из отверстия.
На фиг. 17-22 показан другой вариант осуществления блокирующего механизма для закрывающего спускового механизма. Как показано в этом варианте осуществления, закрывающее спусковое устройство 18 включает гибкое продольное плечо 176, имеющее выступающий боковой шип 178. Плечо 176 и шип 178 могут быть выполнены, например, из формованного пластика. Пистолетная рукоятка 26 ручки 6 имеет отверстие 180 с расположенным внутри него латерально расширяющимся клином 182. Когда закрывающий спусковой механизм 18 втянут, шип 178 зацепляется с клином 182 и увлекается вниз (т. е., плечо 176 вращается по часовой стрелке) нижней поверхностью 184 клина 182, как показано на фиг. 17 и 18. Когда шип 178 полностью минует нижнюю поверхность 184, сила, заставляющая плечо 176 вращаться по часовой стрелке, исчезает, и шип 178 вращается против часовой стрелке, таким образом, шип 178 заходит и фиксируется в вырезке 186 позади клина 182, как показано на фиг. 19, тем самым блокируя закрывающий спусковой механизм 18. Штифт 178 удерживается на месте в закрытом положении гибким ограничителем 188, выступающим из клина 184.
Чтобы разблокировать закрывающее спусковое устройство 18, оператор может дополнительно надавить на закрывающее спусковое устройство 18, чтобы штифт 178 продвинулся до наклонной задней стенки 190 отверстия 180, при этом штифт 178 вынужденно продвигается по направлению вверх мимо гибкого ограничителя 188, как показано на фиг. 20 и 21. Затем штифт 178 свободно выходит через верхний канал 192 отверстия 180, при этом закрывающее спусковое устройство 18 перестает фиксироваться на пистолетной рукоятке 26, как показано на фиг. 22.
На фиг. 23A-B показан универсальный шарнир (“u-образный шарнир”) 195, который может использоваться в шарнирном участке хирургического инструмента, например, инструмента 10. Вторая деталь 195-2 u-образного шарнира 195 вращается в горизонтальной плоскости, в которой расположена первая деталь 195-1. На фиг. 23 A показан u-образный шарнир 195 в линейном (180°) расположении, на фиг. 23 B показан u-образный шарнир 195 в расположении приблизительно на 150°. U-образный шарнир 195 может быть использован вместо конических зубчатых колес 52a-c (см. для примера фиг. 4) в шарнирном сочленении 14 блока основного приводного вала для подвижного присоединения концевого зажима 12. На фиг. 24A-B показан кабель кручения 197, который может быть использован как вместо конических зубчатых колес 52a-c, так и вместо u-образного шарнира 195 для подвижного присоединения концевого зажима 12.
На фиг. 25-31 изображен другой вариант осуществления автоматического двухтактного хирургического режущего и сшивающего инструмента 10 с усилителем. Вариант осуществления, представленный на фиг. 25-31, аналогичен варианту, представленному на фиг. 6-10, за исключением того, что вместо барабана с винтовым зубчатым колесом 80 вариант осуществления, представленный на фиг. 25-31, включает альтернативную группу зубчатой передачи. Вариант осуществления, представленный на фиг. 25-31, включает блок редуктора 200, включающий несколько зубчатых передач, расположенных в рамке 201, при этом зубчатые передачи располагаются между планетарной шестерней 72 и ведущей шестерней 124 на проксимальном конце приводного вала 48. Как описано ниже, блок редуктора 200 обеспечивает обратную связь с пользователем через спусковое устройство 20, информируя о приведении в рабочее положение и силе нагрузки концевого зажима 12. Также пользователь может приложить силу к системе через блок редуктора 200, обеспечивая приведение концевого зажима 12 в рабочее положение. В этом смысле, как в описанных выше вариантах осуществления изобретения, вариант осуществления, показанный на фиг. 25-31, представляет собой еще один усиленный автоматический инструмент 10, дающий пользователю обратную информацию о нагружающей силе, действующей на режущий инструмент 32.
В показанном на иллюстрации варианте осуществления изобретения спусковое устройство 20 включает две части: основную часть корпуса 202 и жесткую часть 204. Основная часть 202 может быть выполнена, например, из пластика, а жесткая часть 204 может быть выполнена из более твердого материала, например, металла. В описанном варианте осуществления жесткая часть 204 примыкает к основной части 202, однако в соответствии с другими вариантами осуществления жесткая часть 204 может быть помещена внутрь основной части 202. Шарнирный штифт 207 может проходить через отверстия в частях 202 и 204 спускового устройства и являться точкой, вокруг которой вращается спусковое устройство 20. Кроме того, пружина 222 может отклонять спусковой механизм 20, заставляя его поворачиваться против часовой стрелки. Дистальный конец пружины 222 может быть связан с штифтом 224, который связан с частями 202 и 204 спускового устройства 20. Проксимальный конец пружины 222 может быть связан с одной из деталей внешней нижней стороны 59 и 60 рукоятки.
В показанном на фигуре варианте осуществления и главная часть корпуса 202, и жесткая часть 204 включают передающие части 206, 208 (соответственно) в верхней концевой части. Передающие части 206 и 208 зацепляют передачу редуктора в сборе 200, как описано ниже, приводя в движение группу основного приводного вала и обеспечивая пользователям обратную связь относительно приведения концевого зажима 12 в рабочее положение.
Редуктор в сборе 200 может включать, как показано в представленном варианте осуществления, 6 (шесть) зубчатых колес. Первое зубчатое колесо 210 блока редуктора 200 зацепляет передающие части 206 и 208 спускового устройства 20. Кроме того, первое зубчатое колесо 210 сцепляется с меньшим по размеру вторым зубчатым колесом 212, меньшее второе зубчатое колесо 212 расположено соосно с большим третьим зубчатым колесом 214. Третья шестерня 214 зацепляется с четвертой шестерней 216 меньшего размера, а четвертая шестерня меньшего размера 216 находится на одной оси с пятой шестерней 218. Пятая шестерня 218 представляет собой зубчатое колесо с уклоном 90°, зацепляющееся с соответствующим коническим зубчатым колесом 220 с уклоном 90° (лучше всего показано на фиг. 31), соединенным с ведущей шестерней 124, приводящей в действие главный приводной вал 48.
В процессе работы, когда пользователь прижимает спусковое устройство 20, датчик запуска двигателя (не показан) активируется, направляя сигнал двигателю 65 к вращению со скоростью, пропорциональной усилию или силе, с которой оператор притягивает спусковое устройство 20, что заставляет двигатель 65 вращаться со скоростью, пропорциональной сигналу от датчика. В данном варианте осуществления датчик не показан, однако он может быть подобен датчику пуска двигателя 110, описанному выше. Датчик может быть расположен в рукоятке 6 таким образом, чтобы он подвергался нажатию при притягивании спускового устройства 20. Также вместо пропорционального датчика может использоваться двухпозиционный датчик.
Вращение двигателя 65 вызывает вращение конических зубчатых колес 66 и 70, что, в свою очередь, вызывает вращение планетарной шестерни 72 и - через приводной вал 76 - вращение кольцевого зубчатого колеса 122. Кольцевое зубчатое колесо 122 зацепляет ведущую шестерню 124, которая соединена с основным приводным валом 48. Таким образом, вращение ведущей шестерни 124 приводит в действие основной приводной вал 48, что инициирует операцию по рассечению/сшиванию концевым зажимом 12.
Вращение ведущей шестерни 124 в прямом направлении, в свою очередь, вызывает вращение конического зубчатого колеса 220, что при неподвижных зубчатых передачах редуктора в сборе 200 вызывает вращение первого зубчатого колеса 210. Первая шестерня 210 зацепляется с зубчатыми частями 206, 208 спускового механизма 20, тем самым заставляя спусковой механизм 20 вращаться против часовой стрелки, когда двигатель 65 приводит в движение концевой зажим 12 (и вращаться против часовой стрелки при вращении двигателя 65 в противоположном направлении). Таким образом, пользователь получает обратную связь относительно силы нагрузки и приведения концевого зажима 12 в рабочее положение при нажатии на спусковое устройство 20. Так, когда пользователь притягивает спусковое устройство 20, он испытывает сопротивление, связанное с силой нагрузки, приложенной к концевому зажиму 12. Сходным образом, когда оператор освобождает спусковое устройство 20 после операции рассечения/сшивания, чтобы оно вернулось в исходное положение, пользователь почувствует силу вращения спускового устройства 20 по часовой стрелке, которая в целом пропорциональна скорости обратного вращения мотора 65.
Необходимо отметить, что в данном варианте осуществления пользователь может приложить силу (вместо или в дополнение к силе двигателя 65), чтобы привести в действие блок основного приводного вала (и, следовательно, концевой зажим 12 во время операции по рассечению/сшиванию), притягивая спусковое устройство 20. Таким образом, втягивание спускового механизма 20 заставляет зубчатые части 206, 208 вращаться против часовой стрелки, что, в свою очередь, заставляет вращаться шестерни в коробке передач 200, что приводит к вращению ведущей шестерни 124 и вращению главного приводного вала 48.
Хотя это не показано на фиг. 25-31, инструмент 10 может дополнительно включать датчик обратного движения двигателя и датчик останова двигателя. Как описано выше, датчики обратного движения и останова двигателя могут обнаруживать, соответственно, конец хода при рассечении тканей (полное развертывание скальпеля 32 и салазок 33) и конец хода при операции втягивания (полное втягивание скальпеля 32). Цепь, сходная с описанной выше для фиг. 11, может использоваться для соответствующей подачи напряжения на двигатель 65.
На фиг. 32-36 показан еще один вариант осуществления двухтактного автоматического хирургического режущего и сшивающего инструмента 10 с усилением. Вариант осуществления, представленный на фиг. 32-36, аналогичен варианту, представленному на фиг. 25-31, за исключением того, что в варианте осуществления, представленном на фиг. 32-36, спусковое устройство 20 включает нижнюю часть 228 и верхнюю часть 230. Обе части 228 и 230 связаны между собой и вращаются вокруг шарнирного штифта 207, который проходит через каждую часть 228 и 230. Верхняя часть 230 включает передающую часть 232, которая зацепляется за первое зубчатое колесо 210 блока редуктора 200. Пружина 222 соединена с верхней частью 230 таким образом, что верхняя часть смещается, поворачиваясь по часовой стрелке. Верхняя часть 230 может также включать нижнее плечо 234, соприкасающееся с верхней поверхностью нижней части 228 спускового механизма 20 таким образом, что когда верхняя часть 230 начинает вращаться по часовой стрелке, нижняя часть 228 также вращается по часовой стрелке, а когда нижняя часть 228 вращается против часовой стрелки, верхняя часть 230 также вращается против часовой стрелки. Сходным образом, нижняя часть 228 включает вращательный упор 238, зацепляющийся с нижним плечом верхней части 230. Таким образом, когда верхняя часть 230 начинает вращаться против часовой стрелки, нижняя часть 228 также вращается против часовой стрелки, а когда нижняя часть 228 вращается по часовой стрелке, верхняя часть 230 также вращается по часовой стрелке.
Данный вариант осуществления также включает датчик запуска двигателя 110, который направляет сигнал к двигателю 65, что в различных вариантах осуществления может вызывать вращение двигателя 65 со скоростью, пропорциональной силе, приложенной оператором при притягивании спускового устройства 20. Датчик 110 может являться, например, реостатом или иным датчиком переменного сопротивления, как описано в настоящем документе. Кроме того, инструмент 10 может включать датчик обратного хода двигателя 130, смещающийся или переключающийся при контакте с передней поверхностью 242 верхней части 230 спускового механизма 20. После приведения в действие датчик обратного действия 130 направляет сигнал двигателю 65 об изменении направления вращения. Кроме того, инструмент 10 может включать датчик останова двигателя 142, который задействуется или срабатывает в случае контакта с нижней частью 228 спускового устройства 20. После приведения в действие датчик останова двигателя 142 направляет сигнал двигателю 65 о прекращении вращения в обратном направлении.
При операции, когда оператор прижимает закрывающее спусковое устройство 18, переводя его в заблокированное положение, спусковое устройство 20 немного втягивается (за счет известных механизмов, в т.ч. в патенте США № 6978921 под заглавием “Хирургический сшивающий инструмент со спусковым механизмом E-Beam” и патенте США № 6905057 под заглавием “Хирургический сшивающий инструмент с механизмом приведения в действия с реечной передачей,” оба из которых включены в настоящий документ посредством ссылок, таким образом, пользователь может сжать спусковой механизм 20 и начать операцию рассечения/сшивания, как показано на фиг. 32 и 33. В этот момент, как показано на фиг. 33, передаточная часть 232 верхней части 230 спускового устройства 20 приходит в зацепление с первым зубчатым колесом 210 блока редуктора 200. Когда оператор притягивает спусковое устройство 20, в соответствии с различными вариантами осуществления, спусковое устройство 20 может немного повернуться, например, на пять градусов, прежде чем сдвинуть датчик запуска двигателя 110, как показано на фиг. 34. Активация датчика 110 вызывает вращение двигателя 65 в прямом направлении со скоростью, пропорциональной силе, которую прикладывает оператор. Движение двигателя 65 в прямом направлении вызывает, как описано выше, вращение главного приводного вала 48, что разблокирует скальпель 32 в концевом зажиме 12 (то есть, позволяет ему перемещаться через канал 22). Вращение ведущей шестерни 124, которая связана с основным приводным валом 48, вызывает вращение зубчатых колес 210 и 220 в редукторе в сборе 200. Так как первая шестерня 210 находится в зацеплении с зубчатой частью 232 верхней части 230 приводного механизма 20, верхняя часть 230 начинает вращаться против часовой стрелки, что заставляет нижнюю часть 228 также вращаться против часовой стрелки.
Когда скальпель 32 полностью выдвинут (т.е., в конце хода инструмента при рассечении тканей), передняя поверхность 242 верхней части 230 соприкасается с датчиком обратного хода двигателя 130, который посылает сигнал двигателю 65 на изменение направления вращения. Это вызывает изменение направления вращения блока основного приводного вала и втягивание скальпеля 32. Обратное вращение узла главного приводного вала заставляет шестерни 210-220 в коробке передач изменить направление вращения, из-за чего верхняя часть 230 спускового механизма 20 начинает вращаться по часовой стрелке, что заставляет нижнюю часть 228 спускового механизма 20 также вращаться по часовой стрелке до тех пор, пока передняя поверхность 242 верхней части 230 не соприкоснется или не приведет в действие датчик остановки двигателя 142 после полного выдвижения скальпеля 32, что приводит к остановке двигателя. Таким образом, пользователь получает обратную связь относительно приведения концевого зажима 12 в рабочее положение при нажатии на спусковое устройство 20. Так, когда пользователь притягивает спусковое устройство 20, он испытывает сопротивление, соотносимое с приведением концевого зажима 12 в рабочее положение и в частности с силой нагрузки, приложенной к скальпелю 32. Сходным образом, если оператор освобождает спусковой механизм 20 после операции рассечения/сшивания, чтобы он вернулся в исходное положение, пользователь ощутит вращательную силу, направленную по часовой стрелке, от спускового механизма 20, которая в целом пропорциональна скорости обратного вращения двигателя 65.
Необходимо отметить, что в данном варианте осуществления пользователь может приложить силу (вместо или в дополнение к силе двигателя 65), чтобы привести в действие блок основного приводного вала (и, следовательно, концевой зажим 12 во время операции по рассечению/сшиванию), притягивая спусковое устройство 20. Таким образом, втягивание спускового механизма 20 заставляет зубчатую часть 232 верхней части 230 вращаться против часовой стрелки, что заставляет шестерни в коробке передач 200 вращаться, в свою очередь, вызывая вращение ведущей шестерни 124 и, следовательно, узла главного приводного вала.
В вышеописанных вариантах осуществления изобретения используются усиленные системы обратной связи, с адаптивным контролем или без (например, с использованием датчика 110, 130 и 142 за пределами замкнутого контура двигателя, цепи зубчатых передач и концевого зажима) для двухтактного, автоматического хирургического режущего и сшивающего инструмента. То есть сила, приложенная пользователем для притягивания спускового устройства 20, может являться дополнением к силе, приложенной двигателем 65, вследствие того, что спусковое устройство 20 включено (напрямую или опосредованно) в цепь зубчатых передач привода между двигателем 65 и основным приводным валом 48. В других вариантах осуществления возможна тактильная обратная связь, указывающая пользователю на положение скальпеля 32 и концевого зажима 12, но без приведения в действие спускового механизма 20, соединенного с цепью зубчатых передач. На фиг. 37-40 показан один из вариантов осуществления автоматического хирургического режущего и сшивающего инструмента 10 с такой тактильной системой обратной связи.
В показанном на фиг. 37-40 варианте осуществления спусковое устройство 20 может иметь нижнюю часть 228 и верхнюю часть 230, по аналогии с инструментом 10, показанным на фиг. 32-36. Однако в отличие от варианта осуществления, изображенного на фиг. 32-36, верхняя часть 230 не имеет передаточной части, которая сопрягается с частью цепи зубчатых передач привода. Вместо этого инструмент 10 включает второй двигатель 265 с резьбовым стержнем 266. В то время как двигатель 265 вращается, резьбовой стержень 266 совершает продольные возвратно-поступательные движения в или из двигателя 265, в зависимости от направления вращения. Инструмент 10 также имеет датчик положения 268, который реагирует на вращение основного приводного вала 48, преобразовывая инкрементное вращательное движение основного приводного вала 48 (или другого компонента основной приводной группы), например, в соответствующие серии цифровых сигналов. В изображенном варианте осуществления ведущая шестерня 124 включает проксимальный приводной вал 270, который соединен с кодирующим устройством 268.
Инструмент 10 также включает систему управления (не показана), которая может быть реализована с помощью микроконтроллера или иной интегральной схемы, принимающей цифровые сигналы от датчика положения 268. На базе сигналов от датчика положения 268 схема управления может определять степень наложения скальпеля 32 в концевом зажиме 12. То есть схема управления может определять, находится ли скальпель 32 в полностью рабочем, полностью втянутом или промежуточном положении. Определив рабочее положение концевого зажима 12, система управления может направить сигнал второму двигателю 265, управляя его вращением и, таким образом, возвратно-поступательными движениями резьбового стержня 266.
В процессе работы, как показано на фиг. 37, когда закрывающее спусковое устройство 18 не заблокировано в прижатом положении, спусковое устройство 20 поворачивается от пистолетной рукоятки 26 рукоятки 6, при этом фронтальная поверхность 242 верхней части 230 спускового устройства 20 не соприкасается с проксимальным концом резьбового стержня 266. Когда оператор прижимает закрывающее спусковое устройство 18 и блокирует его в закрытом положении, спусковое устройство 18 слегка поворачивается в направлении закрывающего спускового устройства 20, при этом оператор может зажать спусковое устройство 20, как показано на фиг. 38. В этом положении фронтальная поверхность 242 верхней части 230 контактирует с проксимальным концом резьбового стержня 266.
По мере того, как пользователь прижимает спусковой механизм 20, после начала вращения (т.е., поворота на 5 градусов) датчик запуска двигателя 110 может активироваться и, как объясняется выше, посылать сигнал двигателю 65, заставляя его вращаться вперед на скорости, пропорциональной силе сжатия спускового механизма 20 оператором. Вращение двигателя 65 в прямом направлении через цепь зубчатых передач привода вызывает вращение основного приводного вала 48, что вынуждает скальпель 32 и салазки 33 спускаться вниз по каналу 22 и рассекать ткань, захваченную концевым зажимом 12. Система управления получает выходные сигналы с датчика положения 268 относительно инкрементного вращения блока основного приводного вала и направляет сигнал второму двигателю 265, вызывая его вращение, в результате чего резьбовый стержень 266 втягивается в двигатель 265. Благодаря этому верхняя часть 230 спускового механизма 20 вращается против часовой стрелки, что позволяет нижней части 228 спускового механизма также вращаться против часовой стрелки. Таким образом, поскольку возвратно-поступательное движение резьбового стержня 266 связано с вращением блока основного приводного вала, оператор инструмента 10, прижимая спусковое устройство 20, получает тактильную обратную связь о положении концевого зажима 12. Однако сила притягивания, которую прикладывает оператор, не влияет напрямую на движение блока основного приводного вала, так как в данном варианте осуществления спусковое устройство 20 не является частью цепи зубчатых передач привода.
За счет возможности отслеживания ускоряющегося вращения главного приводного вала за счет исходящих сигналов от кодирующего устройства 268 цепь управления может вычислить момент, когда скальпель 32 полностью выдвинут (т.е. находится в самой дальней точке). В этот момент система управления может направить сигнал двигателю 65 об изменении направления для втягивания скальпеля 32. Вращения двигателя 65 в обратном направлении вызывает изменение направления вращения блока основного приводного вала, что определяется датчиком положения 268. На базе сигнала датчика положения 268 о вращении в обратном направлении система управления направляет сигнал второму двигателю 265, вынуждая его изменить направление вращения на противоположное, при этом резьбовый стержень 266 начинает выдвигаться в продольном направлении из двигателя 265. Это движение заставляет верхнюю часть 230 спускового механизма 20 вращаться по часовой стрелке, при этом нижняя часть 228 также вращается по часовой стрелке. Таким образом, оператор может ощущать силу вращения спускового устройства 20 по часовой стрелке, что дает ему информацию о втянутом положении скальпеля 32 в концевом зажиме 12. Система управления может определить, когда скальпель 32 находится в полностью втянутом положении. В этот момент система управления может направить сигнал двигателю 65 для остановки вращения.
В соответствии с другими вариантами осуществления, вместо системы управления, определяющей положение скальпеля 32, могут быть использованы датчик обратного движения двигателя и датчик останова двигателя, как описано выше. Кроме того, вместо пропорционального датчика 110 для управления вращением двигателя 65 может использоваться двухпозиционный датчик. В таком варианте осуществления оператор не может контролировать скорость вращения двигателя 65, однако двигатель может вращаться с предварительно определенной скоростью.
На фиг. 43-61 показаны варианты осуществления батарей и конфигурации батарей для использования с автоматическими хирургическими инструментами. Описанные ниже батареи и конфигурации батарей могут использоваться с любым подходящим автоматическим хирургическим инструментом, включая, например, инструменты в соответствии с описанными здесь вариантами осуществления изобретения. В дополнение к или вместо функций описанных здесь вариантов осуществления хирургических инструментов, в которых используются батареи или конфигурации батарей, показанные на фиг. 43-6, могут использоваться концевые зажимы для рассечения, захвата, лазерного рассечения и/или коагуляции и т.п. Дополнительные подробности о хирургических инструментах и батарейных блоках описаны в патентной заявке США серийный № ____________, под заглавием "УСТРОЙСТВА УПРАВЛЕНИЯ ПИТАНИЕМ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ И БАТАРЕЯМИ", поданной 17 сентября 2010 г и включенной в настоящий документ посредством ссылки.
На фиг. 43 показан один из вариантов осуществления хирургического инструмента 500, включающего пару комплектов батарей 506 асимметричной формы. Инструмент 500 может содержать рукоятку 502, спусковой механизм 504 и концевой зажим 501. В соответствии с разными вариантами осуществления, действие рукоятки 502, спускового механизма 504 и концевого зажима 501 может быть сходным с описанным для различных рукояток 6, спусковых механизмов, 18, 20 и концевых зажимов 12, описанных в настоящем документе. В дополнение к или вместо описанных здесь устройств концевой зажим 501 может включать хирургические инструменты для рассечения, захвата, лазерного рассечения и/или коагуляции, радиочастотного рассечения и/или коагуляции, ультразвукового рассечения и/или коагуляции, и т.п.
В рукоятке 502 инструмента 502 могут располагаться батарейный блоки 506, как показано на фиг. Батарейные блоки 506 могут иметь электрические контакты с цепью 514 инструмента 500 и могут обеспечивать его питание. Электрическая цепь может располагаться в рукоятке 502, как показано на фигуре, в концевом зажиме 501, либо в любом месте инструмента 500. При эксплуатации инструмента электрическая цепь 514 может обеспечивать питание для работы, по меньшей мере, одного хирургического устройства в концевом зажиме 501. Например, электрическая цепь 514 может включать электрический двигатель для приведения в действие режущего инструмента, захвата или другого механического устройства. В дополнение к, либо вместо двигателя, электрическая цепь 514 может включать соответствующие электрические компоненты для работы радиочастотного, ультразвукового или другого типа хирургического инструмента, работающего не от двигателя.
На фиг. 44 показан один из вариантов осуществления батарейного блока 506 за пределами рукоятки 502. батарейный блок 506 может иметь асимметричную форму в поперечном сечении. Например, в варианте осуществления, показанном на фиг. 44, батарейный блок 506 имеет полуовальную форму. Следует понимать, что возможно использование и других форм в поперечном сечении. Как показано на фигуре, батарейный блок 506 включает три элемента 508. Элементы 508 могут представлять собой любой подходящий тип ячеек, например, литий-ионные элементы, такие, как тип CR123 или тип CR2. Ячейки 508 могут быть соединены друг с другом последовательно или параллельно. Число ячеек 508 можно подобрать в зависимости от требований к мощности любого случайного разряда от комплекта батарей 506. Например, число соединенных ячеек 508 можно подобрать таким образом, чтобы общая энергия, доступная для образования электрической дуги или короткого замыкания, была меньше энергии, необходимой для воспламенения распространенных транспортных или упаковочных материалов. В соответствии с разными вариантами осуществления, это значение может определяться соответствующими правительственными требованиями.
На фиг. 45 показан один вариант осуществления рукоятки 502 с полостями 510, 512 для установки комплектов батарей 506. Полости 510, 512 могут иметь асимметричную форму в поперечном сечении, соответствующую форме батарейного блока 506 в поперечном сечении. Благодаря этому полости 510, 512 могут вмещать комплекты батарей 506, как показано на фиг. 43. Внутренняя часть 529 полости 510 также показана на фиг. 45. Стенка 530 может содержать контакты 532, 534. Контакты 532, 534 могут быть подсоединены к цепи 514 и иметь такую конфигурацию, чтобы соединять батарейный блок 506 с электрической цепью 514 при установке батарейного блока 506 в полость 510. Следует учитывать, что полость 512 может включать сходные внутренние части и контакты. Однако для ясности эти элементы не показаны на фиг. 45.
На фиг. 46 показан один из вариантов осуществления батарейного блока 506 с контактом положительного электрода 518 и контактом отрицательного электрода 520. При вставке батарейного блока 506 в полость 510 контакты электродов 518 и 520 могут соединяться с контактами 532, 534, показанными на фиг. 45, для установления связи между батарейным блоком 506 и электрической цепью 514. Контакты электродов 518, 520 показаны на первом конце 522 батарейного блока 506. Однако следует учитывать, что контакты электродов 518, 520 могут располагаться на любой другой поверхности батарейного блока 506, в том числе, например, на конце 524, плоской поверхности 526 и/или изогнутой поверхности 528. Соответственно, контакты 532, 534 могут располагаться на соответствующей поверхности внутренней части 529 полости 510.
Асимметричная в поперечном сечении форма батарейного блока 506 и полостей 510, 512 позволяет гарантировать, что батарейные блоки 506 будут вставлены в инструмент 500 с соблюдением полярности. Например, благодаря асимметричной в сечении форме конец 522 батарейного блока 506 может войти в полость 510 рукоятки 502 только в одном положении, что гарантирует правильный контакт электродов 518, 520, 532, 534 друг с другом. Сходным образом, конец 522 батарейного блока 506 входит в полость 512 только в одном положении. Так как поперечное сечение полости 512 обратно таковому полости 510, ориентация контактов электродов 518, 520 в полости 512 может быть обратной по отношению к полости 510. Соответственно, если полости 510, 512 имеют зеркально отраженную форму в поперечном сечении, как показано на фигуре, положение контактов (не показаны) в полости 512 также может быть обратным, чтобы гарантировать правильную полярность.
Клиницист может полагаться на то, что конец 522 батарейного блока 506 с электродами 518, 520 будет правильно вставлен в полости 510, 512. Однако в соответствии с разными вариантами осуществления, форма батарейного блока 506 может варьировать таким образом, чтобы сделать вставку конца 524 батарейного блока 506 в полости 510, 512 сложной или невозможной. Например, на фиг. 46 показан батарейный блок 506 с дополнительной кромкой 522 на конце 524. Кромка 522 может выступать за батарейный блок 506, гарантируя, что конец 524 не может быть вставлен в полости 510, 512. Хотя в показанном на фигуре инструменте 500 используется два батарейных блока 506 и две полости 510, 512, следует учитывать, что возможно использование большего количества батарейных блоков или дополнительные блоки.
На фиг. 47 показан один вариант осуществления батарейного блока 506 в сочетании с выходным разъемом 540. Разряжающий разъем 540 может присоединяться к концу 522 батарейного блока 506, например, после завершения использования батарейного блока 506. В определенных вариантах осуществления разряжающий разъем 540 может иметь площадь сечения немного больше, чем у батарейного блока 506, и может скользить вдоль конца 522. Разряжающий разъем может включать контакты электродов 542, 546, соединенные между собой резистивным элементом 546. Резистивный элемент 546 может представлять собой любой подходящий резистивный элемент с подходящим электрическим сопротивлением и/или полным сопротивлением. Когда он находится на месте, контакты электродов 542, 546 могут соединяться с отрицательным и положительным контактами электродов 518, 520. Таким образом, резистивный элемент 546 может быть последовательно соединен с батарейным блоком 506, приведя к разряду батареи. Таким образом, батарейный блок 506 можно разрядить перед утилизацией с целью снижения риска
На фиг. 48 показана схема одного из вариантов осуществления хирургического инструмента 602 и батарейного блока 600. Хирургический инструмент 602 может действовать способом, сходным со способом действия других хирургических инструментов 10, 500, описанных выше. Например, инструмент 602 может представлять собой любой подходящий тип хирургического инструмента, работающего от батарей, включая, например, инструменты с автоматическими устройствами для рассечения, сшивания, радиочастотного рассечения и/или коагуляции, ультразвукового рассечения и/или коагуляции, лазерного рассечения/коагуляции и т.п. Хирургический инструмент 602 может включать пару электродов 604, 606, которые, при подключенном комплекте батарей 600 к хирургическому инструменту 603, могут соединяться с парой электродов 608, 610 батарейного блока 600.
Батарейный блок 600 может включать множество ячеек 612. Ячейки 612 могут быть любого подходящего типа. В соответствии с различными вариантами осуществления, ячейки могут быть литий-ионными элементами, например, типа CR123 или типа CR2. Переключатель 614 может находиться в открытом положении и в закрытом положении. Переключатель 614 может представлять собой любой подходящий тип механического или твердотельного реле. Когда переключатель 614 находится в открытом положении, ячейки 612 могут быть электрически не связаны друг с другом. Когда переключатель 614 находится в закрытом положении, элементы питания 612 могут быть связаны друг с другом. Например, на фиг. 48 ячейки 612 соединены параллельно. Однако в различных вариантах осуществления изобретения ячейки 612 могут быть соединены последовательно или в любой другой желаемой конфигурации. Переключатель 614 может фиксироваться в закрытом положении при вставке батарейного блока 600 в хирургический инструмент 602. Например, переключатель 614 может быть зафиксирован клиницистом, использующим хирургический инструмент 602, вручную, либо до, либо после подключения батарейного блока 600 к инструменту 602. Кроме того, в соответствии с различными вариантами осуществления, переключатель 614 может фиксироваться в закрытом положении автоматически при соединении батарейного блока 600 с инструментом 602 (в частности, при вставке, по меньшей мере, части батарейного блока 600 в хирургический инструмент 602).
Батарейный блок 600 может также включать систему разряда 616. Система разряда 616 может включать переключатель разряда 618 и резистивный элемент 620. Резистивный элемент 620 может представлять собой любой подходящий резистивный элемент с подходящим электрическим сопротивлением и/или полным сопротивлением. Переключатель разряда 618 может находиться в открытом и закрытом положении. Когда переключатель разряда находится в открытом положении, резистивный элемент 620 может быть электрически не связан с батарейным блоком. Когда переключатель разряда 618 находится в закрытом положении, резистивный элемент 620 может иметь электрические контакты с ячейками 612 батарейного блока 600. Таким образом, ячейки 612 могут разрядиться при закрытом положении переключателя разряда 618. Переключатель разряда 620 может представлять собой любой тип механического или твердотельного переключателя. Переключатель разряда 618 может переводиться из открытого в закрытое положение вручную или автоматически, например, при вставке батарейного блока 614 в инструмент 602 или при удалении хирургического инструмента 602 из инструмента 602. В некоторых вариантах осуществления изобретения ячейки 612 могут давать достаточно энергии и/или резистивный элемент 620 может иметь такую конструкцию, что переключатель разряда 618 может переходить в закрытое положение при использовании инструмента 602.
На фиг. 49 показан альтернативный вариант осуществления батарейного блока 600 и хирургического инструмента 602, показанного на фиг. 48. Как показано на фиг. 49, переключатель 614 может включать, по меньшей мере, одну открытую часть 622 и, по меньшей мере, один замыкатель 624. Как показано на фигуре, по меньшей мере, один замыкатель 624 может быть частью хирургического инструмента 602. Таким образом, ячейки 612 могут быть электрически связаны друг с другом, если батарейный блок 600 вставлен в хирургический инструмент 602 так, чтобы, по меньшей мере, одна часть замыкателя контактировала с, по меньшей мере, одной открытой частью 622.
На фиг. 50 показан еще один вариант осуществления батарейного блока 600, показанного на фиг. 48. Как показано на фиг. 50, переключатель 614 имеет открытую часть 634, замыкатель 636 и подвижный лепесток 631. Замыкатель 636 может механически изменять положение по отношению к открытой части 634, например, за счет пружины 630. Подвижный лепесток 631 может располагаться между открытой частью 634 и замыкателем 636. Подвижный лепесток 631 может быть изготовлен из изолирующего материала, например, пластмассы. Таким образом, ячейки 612 могут быть электрически не связаны друг с другом, когда подвижный лепесток 631 находится на месте. Когда батарейный блок 600 готов к использованию, лепесток 631 может быть удален, например, врачом. После удаления 631 замыкатель 636 может механически прижиматься к электрическому контакту открытой частью 634, создавая электрическое соединение ячеек 612 друг с другом. В соответствии с различными вариантами осуществления, лепесток 631 может включать часть 632 с такой конфигурацией, чтобы вмещать соответствующую часть 638 хирургического инструмента. При установке в инструмент батарейного блока 600 часть 638 хирургического инструмента 602 может контактировать с лепестком 631, стремясь вытеснить его из пространства между открытой частью 634 и замыкателем 636. Лепесток 631 может быть изготовлен из полимера или любого другого подходящего изолирующего материала. Кроме того, в соответствии с разными вариантами осуществления изобретения, лепесток 631 может иметь толщину примерно 25.4 микрон (1 mil).
На фиг. 51-53 показан один механический вариант осуществления батарейного блока 700 со схематическим изображением батарейного блока 600 с фиг. 48. батарейный блок 700 включает корпус 707 с батареей 703, содержащей множество ячеек, которые могут быть соединены друг с другом с помощью контактов 708, 710. Переключатель разряда 712 может, находясь в закрытом положении, соединять резистивный элемент 714 с контактами ячеек 703, приводя к их разряду. Батарейный блок 700 может включать пару контактов 706, 704, расположенных на платформе 716. Замыкатели 706, 704 могут находиться в открытом положении, как показано на фиг. 51, и в закрытом положении. В открытом положении замыкатели 706, 704 могут соединяться с контактами 708, 710, соединяя ячейки 703 между собой. В целом, платформа 716, контакты 708, 710 и замыкатели 704, 706 могут образовывать переключатель. В соответствии с различными вариантами осуществления изобретения, когда переключатель находится в закрытом положении (т.е., замыкатели 704, 706 соединены с контактами 708, 710), ячейки батареи 703 могут быть электрически связаны между собой.
Переключающая платформа 716 может быть соединена с зажимом 705 с парой блокирующих механизмов 702. В позиции, показанной на фиг. 51, зажим (включающий блокирующие механизмы 702) зафиксирован, удерживая переключающую платформу 716 в открытом положении. Батарейный блок 700 может также содержать переключатель разряда 712. В закрытом положении переключатель разряда 712 может изменять положение резистивного элемента 714 по отношению к аноду и катоду ячеек 703, приводя к их разряду. Как показано на фиг. 51, переключатель разряда может механически переводиться в закрытое положение пружиной 718. Однако изменению положения пружины 718 может препятствовать стопор 720, контактирующий с подвижной частью панели 722 корпуса 707.
На фиг. 52 показана конфигурация батарейного блока 700 с фигура 51 при вставке в хирургический инструмент 750, вид в разрезе. Батарейный блок 700 может быть вставлен в полость 754 инструмента 750. Полость 754 может располагаться в любой части инструмента 750, в том числе, в различных вариантах осуществления, в рукоятке. Полость 754 может содержать пару контактов 756, 758, которые могут по положению соответствовать контактам 706, 708. Батарейный блок 700 может быть вставлен в инструмент 750 в направлении стрелки 753. При вставке батарейного блока 700 замыкатели 706, 704 могут прийти в контакт с контактами 756, 758. Это может способствовать сближению замыкателей 706, 708 и переключающей платформы 716 и контактов 708, 710 таким образом, что замыкатели 706, 704 образуют электрическое соединение с контактами 710, 708 и контактами 756, 758, результатом чего может стать взаимное соединение ячеек 703 и их электрическое соединение с инструментом 750.
В соответствии с разными вариантами осуществления изобретения, давление контактов 756, 758 может превзойти силу зажима 705, освободив блокирующий механизм 702, благодаря чему переключающая платформа 716 сможет переместиться к контактам 708, 710. Кроме того, в различных вариантах осуществления изобретения, часть внутреннего пространства полости 754 может содержать одну или несколько ключевых частей 760, 764, по своему положению совмещенных с одним или более приемников 762, 766, связанных (например, механически или электронно) с блокирующими механизмами 702. Когда ключевые части 760, 764 контактируют с приемниками 762, 766, механизмы 702 блокировки зажима 705 могут освободиться, позволив переключающей платформе 716 принять положение, показанное на фиг. 52. В соответствии с разными вариантами осуществления изобретения, после того, как переключающая платформа 716 примет положение, показанное на фиг. 52, блокирующие механизмы 702 могут снова прийти в зацепление, заблокировав переключающую платформу 716 на месте. В соответствии с разными вариантами осуществления изобретения, это затрудняет потерю электрической совместимости батарейного блока 700 с инструментом 750 после вставки.
Внутреннее пространство полости 754 может также содержать элемент 752 (например, выступ) для контакта с панелью 722. Например, при вставке батарейного блока 700 в полость 754, выступ 752 может соприкасаться с панелью 722, скользя в направлении стрелки 755 и позволяя стопору 720 выступать из корпуса 707 (в частности, благодаря смещению пружины 718). В соответствии с разными вариантами осуществления, стопор 720 может соприкасаться с внутренней стенкой полости 754, препятствуя переходу переключателя разряда 712 в закрытое положение. На фиг. 53 показан один из вариантов осуществления батарейного блока 700 после извлечения из хирургического инструмента 750. Переключающая платформа 716 может блокироваться блокирующими механизмами 702 в одном положении, как показано на фиг. 52. Кроме того, на внутренней стенке полости 754 может располагаться стопор 720, выступающий над корпусом 707, в степени, достаточной для перевода переключателя разряда 712 в закрытое положение. Это может привести к разряду батареи 703.
На фиг. 54-61 показан другой механический вариант осуществления батарейного блока 800 со схемой батарейного блока 600, показанного на фиг. 48. Батарейный блок 800 может включать корпус 802 с внутренней полостью 810. Корпус 802 может быть закрыт крышкой 804, которая может быть закреплена на корпусе 802 с помощью одной или более механических защелок 806, 808. На фиг. 55 показан один из вариантов осуществления батарейного блока 800 со снятой крышкой 804, чтобы показать множество ячеек 812 внутри. Можно использовать любое подходящее число и/или тип ячеек 812. Например, можно использовать ячейки CR123 и/или CR2. На фиг. 56 показан один из вариантов осуществления батарейного блока 800 с удаленной частью корпуса 802 для лучшей видимости ячеек 812.
На фиг. 57 показан один из вариантов осуществления батарейного блока 800 с разрядным контактом 814 в разрезе. Разрядный контакт 814 может располагаться во внутренней полости 810 и может скользить во внутренней полости 810 в направлениях стрелки 815. Разрядный контакт 814 может включать, по меньшей мере, два контакта 818, 816. Часть контактов 818, 816 может касаться стенки 826 внутренней полости 810. В соответствии с разными вариантами осуществления изобретения, контакты 816, 818 могут смещаться для воздействия на стенки 826 с целью сопротивления движению разрядного контакта 814 в направлении стрелок 815. Кроме того, в некоторых вариантах осуществления стенки 826 могу иметь один или более выступов 828, по форме соответствующих части одного или более контактов 816, 818, чтобы вмещать разрядный контакт 814 в первом положении, как показано на фиг. 57. Кроме того, стенки 826 могут иметь один или более электродов 824. Электроды 824 могут быть соединены проводниками с ячейками 812, таким образом, что в результате соединения между электродами 824 положительные и отрицательные электроды ячеек 812 будут закорочены.
Контакты 816, 818 разрядного контакта 814 могут быть соединены в основном положении 820 разряжающего разъема 814. В соответствии с различными вариантами осуществления изобретения, контакты 816, 818 могут быть закорочены друг на друга, либо электрически соединены через резистивный элемент 822. На фиг. 58 показан один из вариантов осуществления батарейного блока 800, установленного в хирургический инструмент 850. Хирургический инструмент 850 может содержать удлиняющий элемент 852 с соответствующей конфигурацией, чтобы входить в полость 810. Удлиняющий элемент 854 может включать один или более электродов 854, расположенных так, чтобы соединяться с электродами 855 батарейного блока 800, если элемент 854 вставлен полностью. Таким образом, ячейки 812 батарейного блока 800 могут обеспечивать питание инструмента 830 через электроды 854, 855.
Когда элемент 852 вставлен во внутреннюю полость 810, он может соприкасаться с разряжающим разъемом 820 и заставлять его двигаться вдоль полости 810 в направлении стрелки 857. Например, создаваемая элементом 852 сила, действующая на разряжающий разъем батареи 820, может превзойти сопротивление разряжающего разъема движению, создаваемое контактами 816, 818, например, в сочетании с удерживающими элементами 828. Если элемент 852 вставлен до конца, как показано на фиг. 59, элемент 852 может толкать разряжающий разъем 814 в полость 810 до тех пор, пока контакты 816, 818 не образуют электрическое соединение с электродами 824. Это может либо закоротить ячейки 812, либо образовать электрическое соединение между ними через резистивный элемент 822. Когда батарейный блок 800 извлечен из инструмента 850, элемент 852 может быть удален из полости 810. Однако разряжающий разъем 814 может остаться в положении, показанном на фиг. 59. Таким образом, ячейки 812 могут выпустить какой-либо оставшийся заряд через резистивный элемент 822 либо до, либо после утилизации. Это позволяет, например, свести к минимуму любые случайные разряды во время утилизации.
На фиг. 60 и 61 показан один вариант осуществления разряжающего разъема батареи 814, извлеченного из корпуса 802. Как показано на фигуре, разъем 814 может включать два набора контактов 818, 816 и 818′, 816′. Основание 820 может иметь центральную часть 830 между двумя наборами контактов 816, 818, 816′, 818′. В соответствии с различными вариантами осуществления, центральная часть 830 может иметь такую конфигурацию, чтобы соприкасаться с элементом 852, как показано на фиг. 58-59. На фиг. 61 показаны резистивные элементы 822, смонтированные на основании 820. Резистивные элементы 822 могут быть элементами с любым подходящим сопротивлением и любой механической конфигурации. Например, как показано на фиг. 61, резистивные элементы 822 могут включать один или более компонентов, монтирующихся на поверхности.
Следует понимать, что, по меньшей мере, некоторые из фигуров и описаний в настоящем документе упрощены с целью иллюстрации элементов, необходимых для четкого понимания изобретения, при этом другие элементы удалены для ясности. Однако специалистам в данной области будет понятно, что эти и другие элементы могут быть желательными. Однако, поскольку такие элементы хорошо известны и потому, что они не способствуют лучшему пониманию изобретения, обсуждение этих элементов опущено.
В то время как в данном документе описано несколько вариантов осуществления, специалистам в данной области очевидно, что возможны различные модификации, изменения и адаптации этих вариантов с достижением некоторых или всех преимуществ данного изобретения. Например, в соответствии с различными вариантами осуществления один компонент может быть заменен множеством компонентов, а множество компонентов могут быть заменены одним компонентом для выполнения заданной функции или функций. Следовательно, эта заявка распространяется на все такие модификации, изменения и адаптации без отклонения от масштаба и духа изобретения, описанного в прилагаемой формуле.
Любой патент, публикация или другая информация, которые полностью или частично включены в данный документ посредством ссылки, являются составной частью данного документа в той степени, в которой они не противоречат определениям, положениям и другой информации, представленной в настоящем документе. В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям данного документа, которая была включена в указанный документ посредством ссылки. Любой материал или его часть, которая включена в настоящий документ посредством ссылки и которая противоречит указанным определениям, положениям или другой информации, представленной в настоящем документе, включается в данный документ в той мере, в которой между включенным посредством ссылки материалом и настоящим документом не возникает противоречий.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМЫ РЕГУЛИРОВКИ МОЩНОСТИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ И АККУМУЛЯТОРОВ | 2011 |
|
RU2573584C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2653808C2 |
| ПРЕДОСТАВЛЕНИЕ ОПЕРАТИВНОЙ ОБРАТНОЙ СВЯЗИ ДЛЯ ПОЛЬЗОВАТЕЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2690397C2 |
| МЕХАНИЗИРОВАННЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С МЕХАНИЗМАМИ БЛОКИРОВКИ СИСТЕМЫ ЗАПУСКА | 2014 |
|
RU2675082C2 |
| УСОВЕРШЕНСТВОВАНИЕ ПРИВОДНОГО ХИРУРГИЧЕСКОГО СШИВАЮЩЕГО ИНСТРУМЕНТА | 2010 |
|
RU2529375C2 |
| СИСТЕМЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ | 2014 |
|
RU2654602C2 |
| КОМПОНОВКА ДАТЧИКА ДЛЯ СИСТЕМЫ ОПРЕДЕЛЕНИЯ АБСОЛЮТНОГО ПОЛОЖЕНИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2684021C2 |
| КОНЦЕВОЙ ЭФФЕКТОР ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2690895C2 |
| ДОСТУП К ДАННЫМ, ХРАНИМЫМ В ПАМЯТИ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2012 |
|
RU2594070C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВИГАТЕЛЬ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2662877C2 |
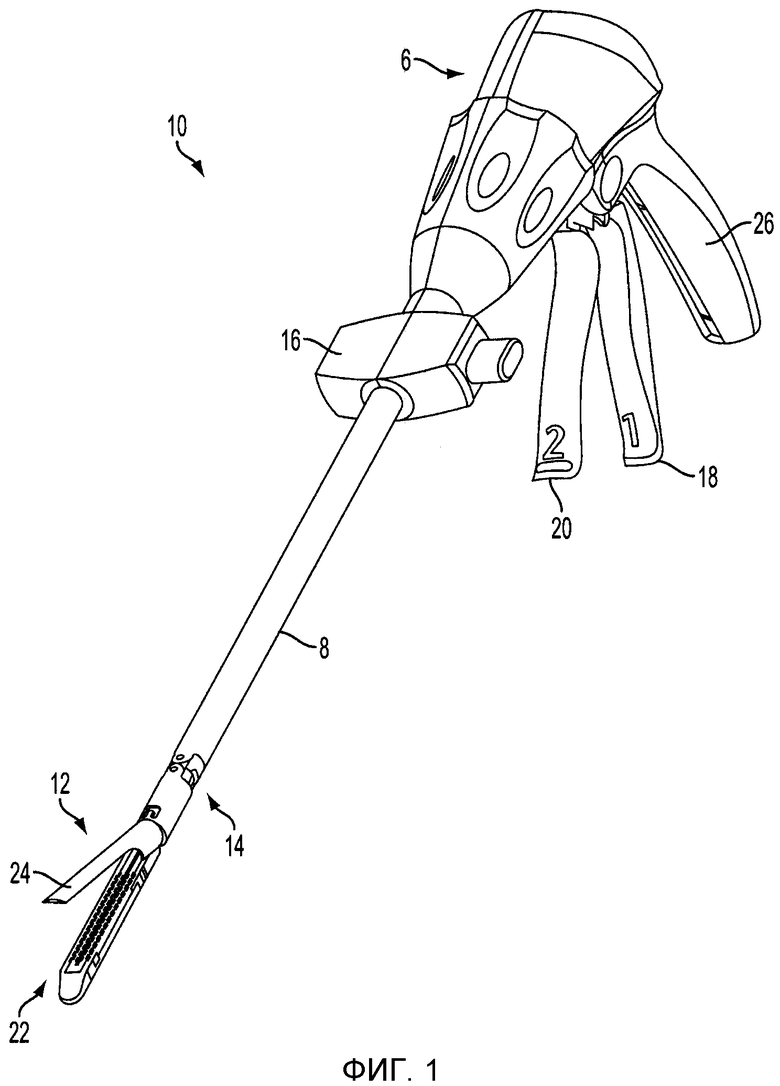
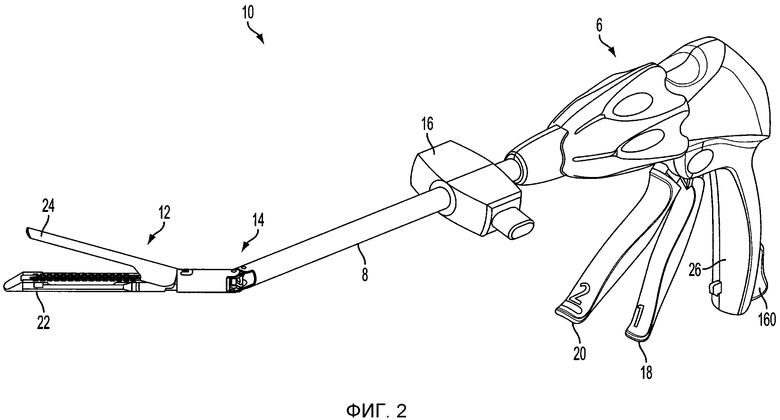
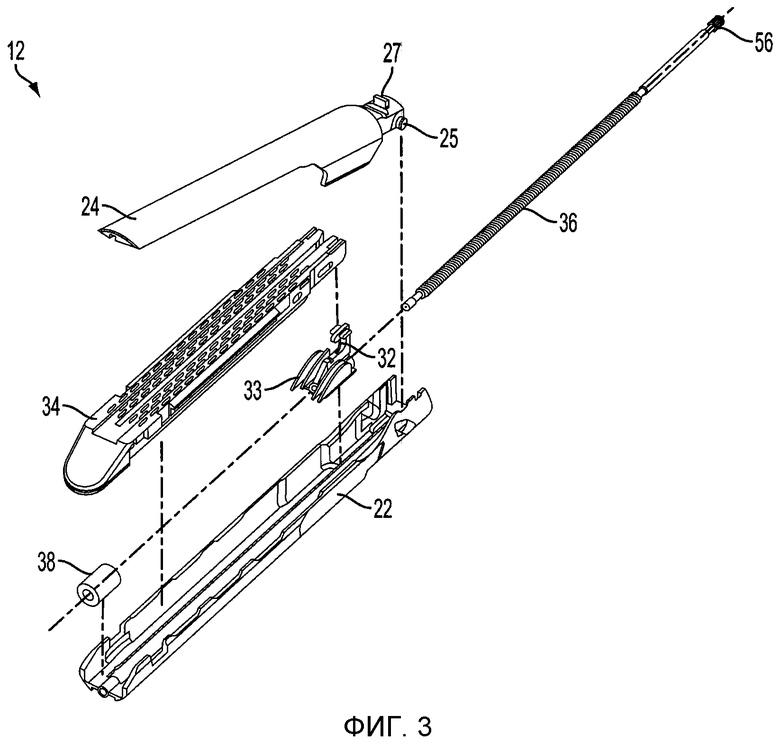
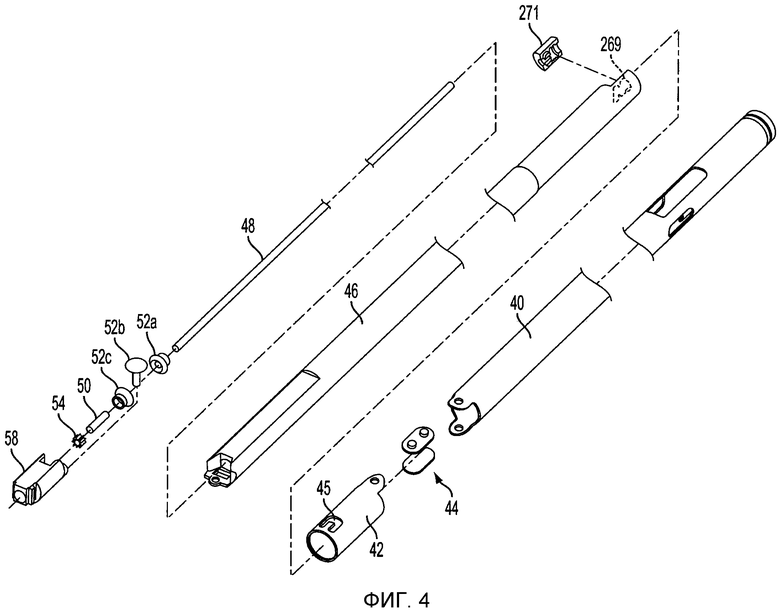
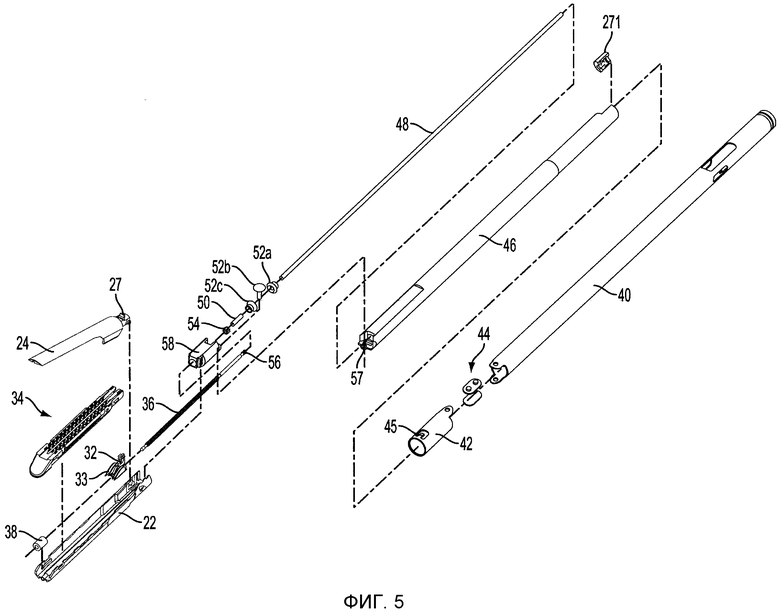
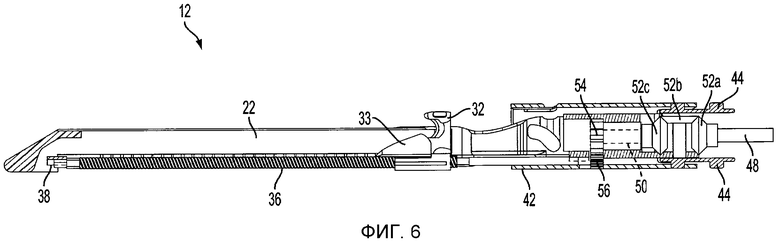
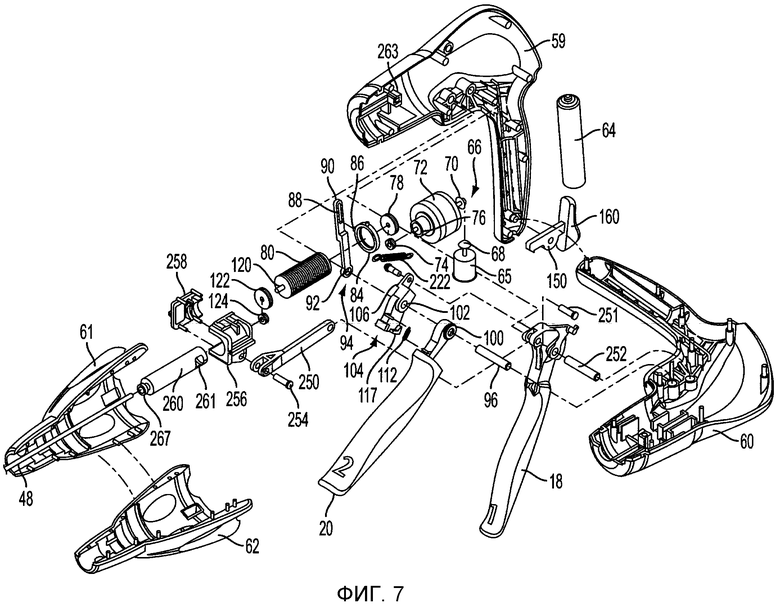
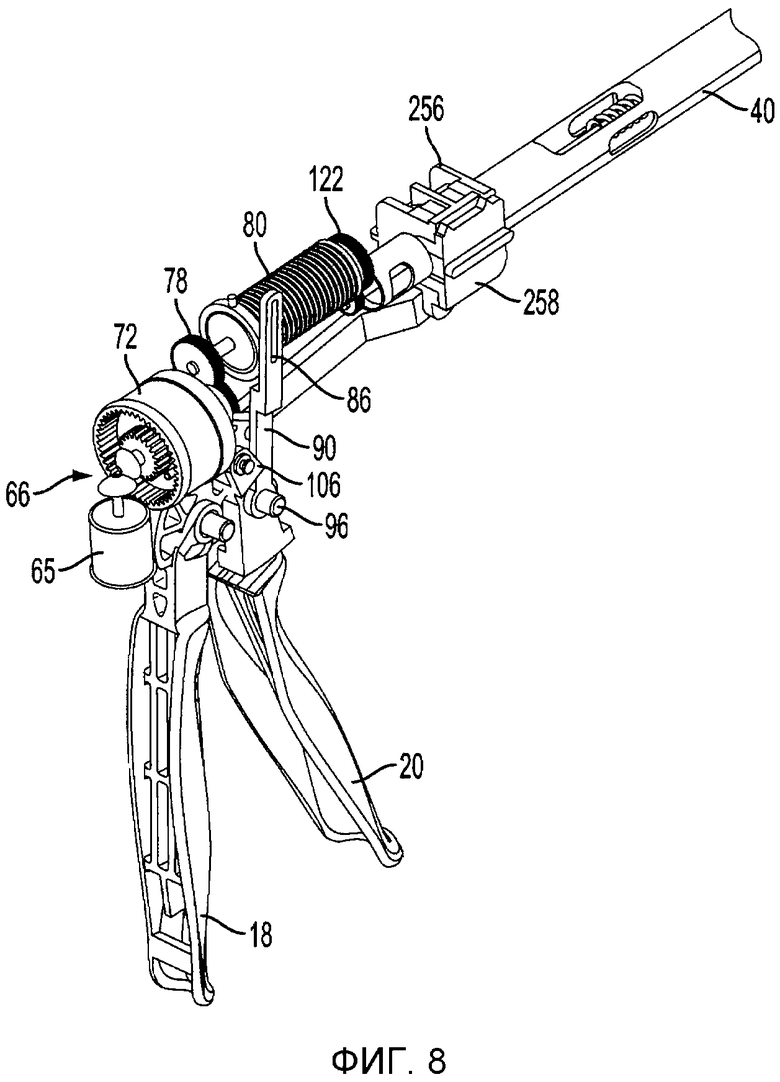
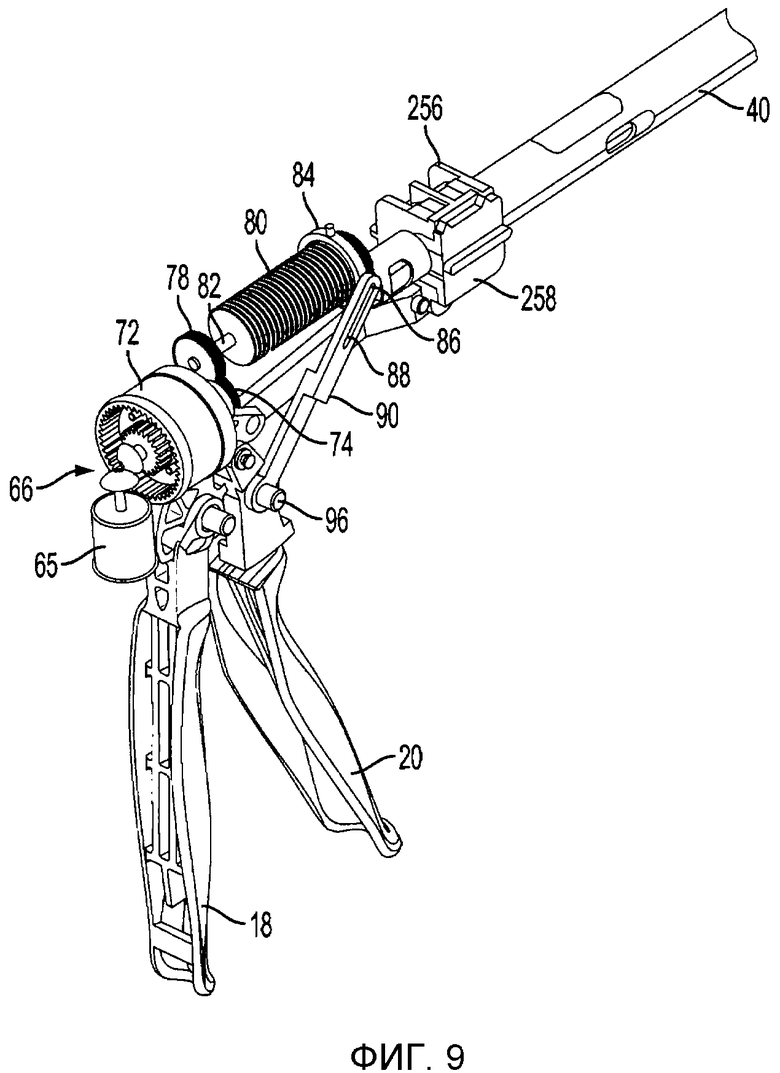
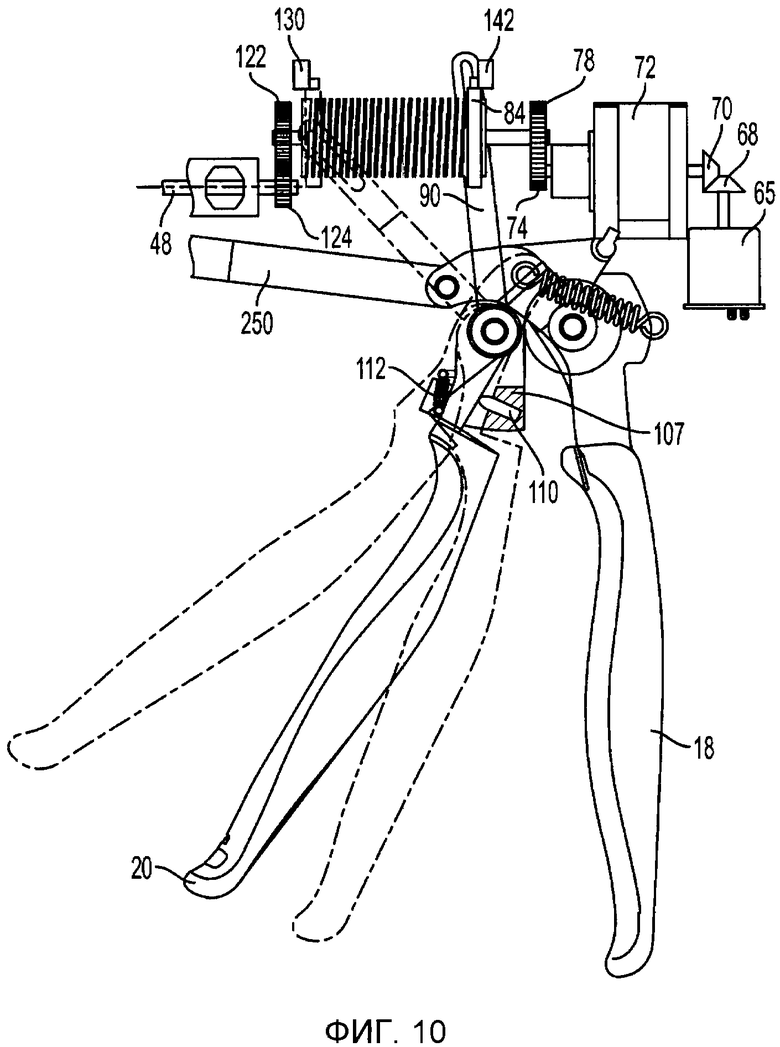
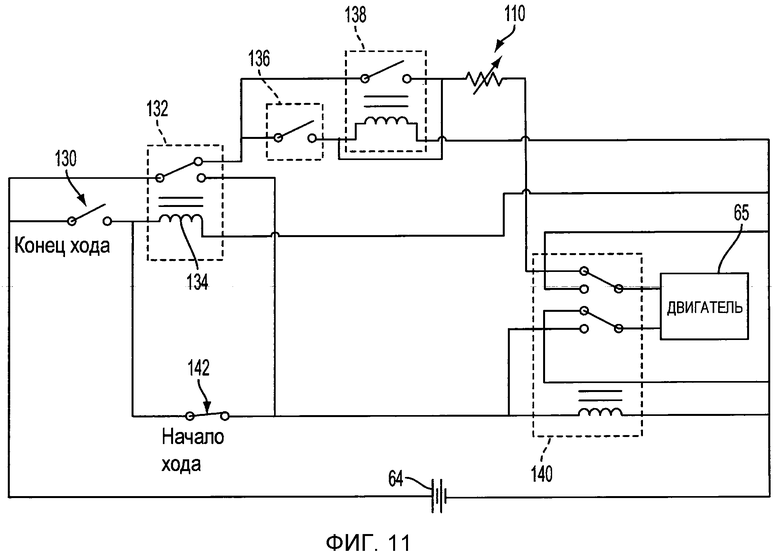
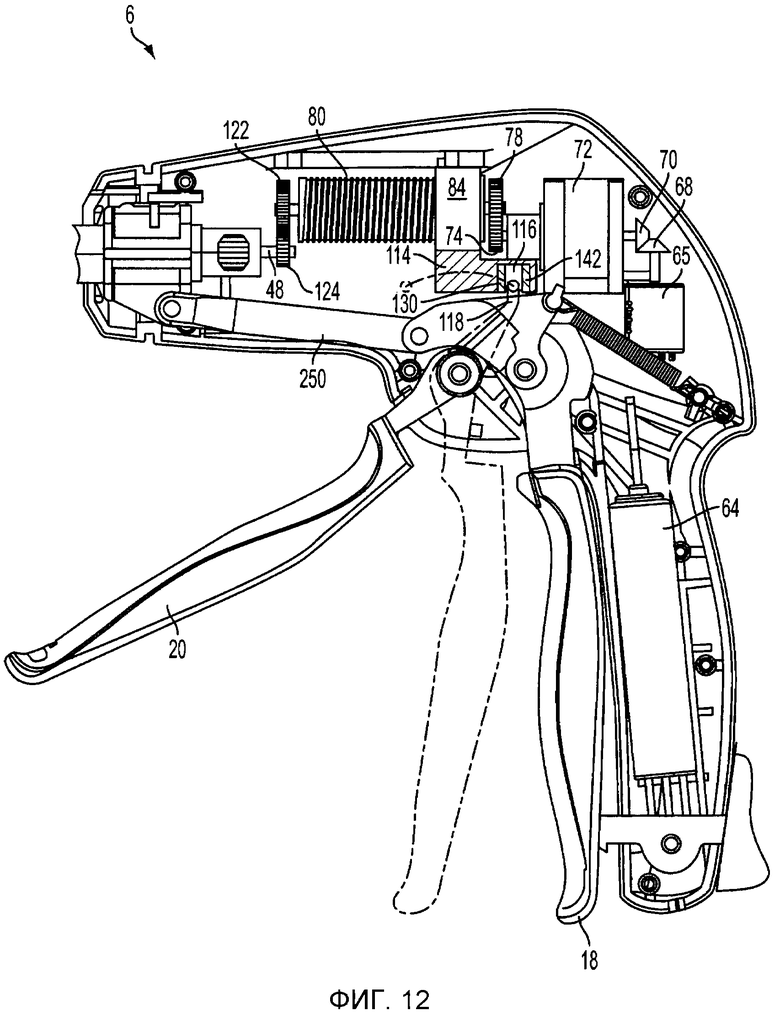
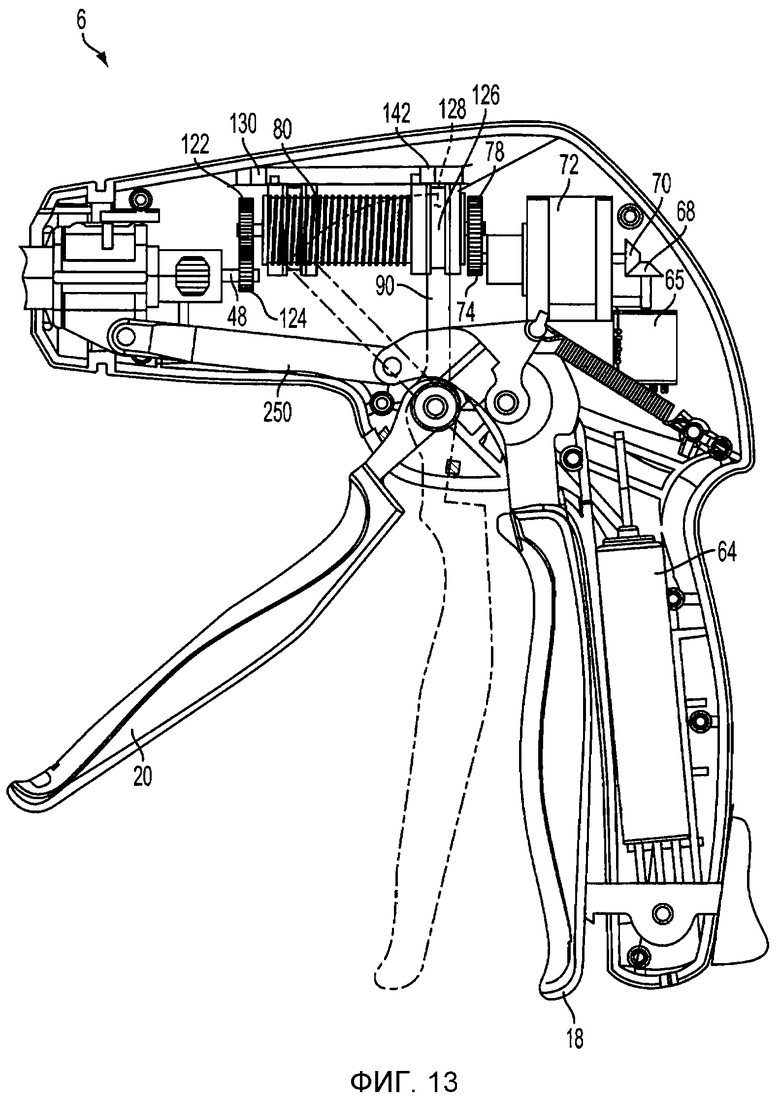
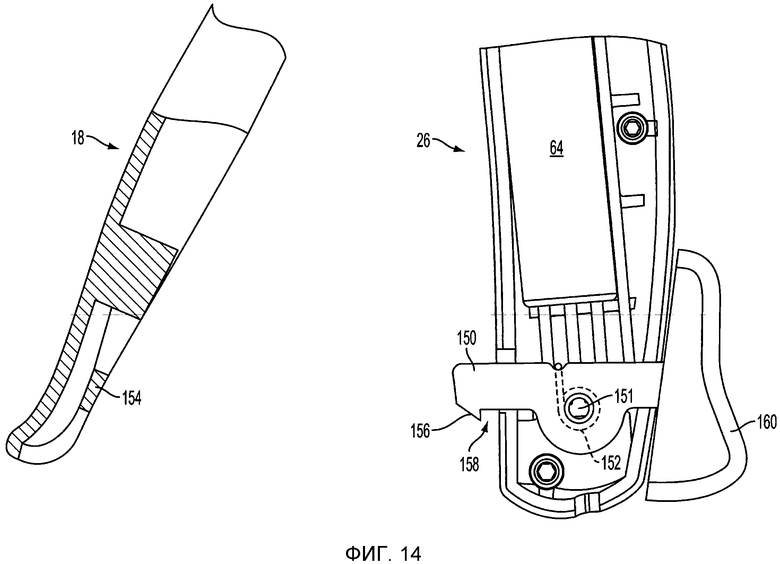
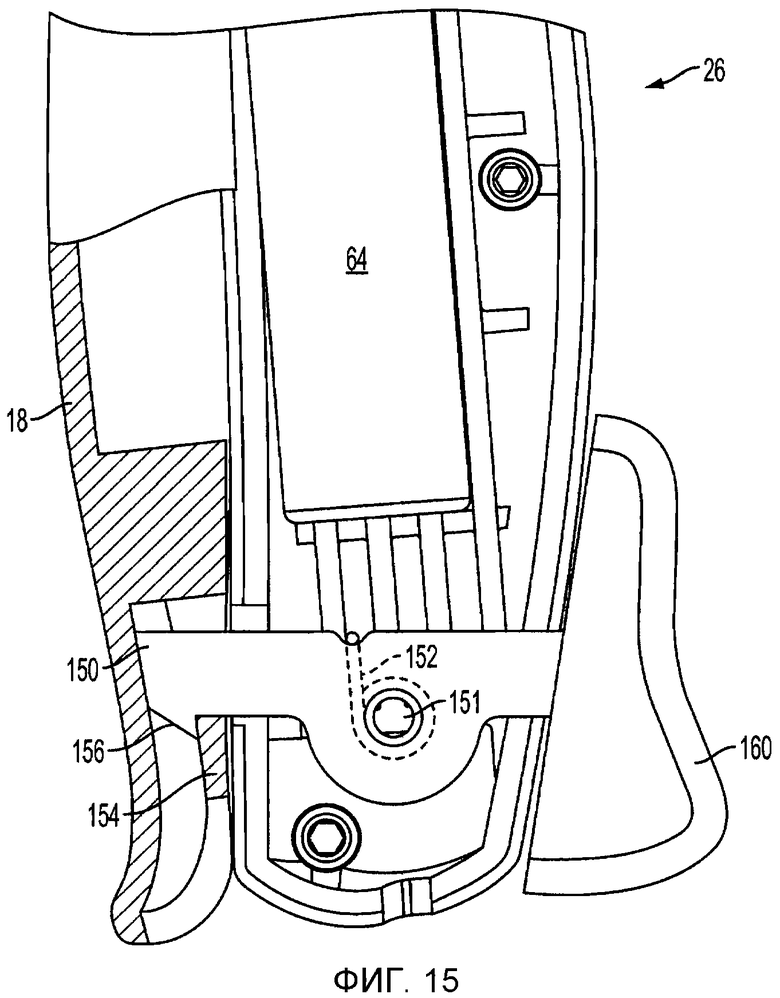
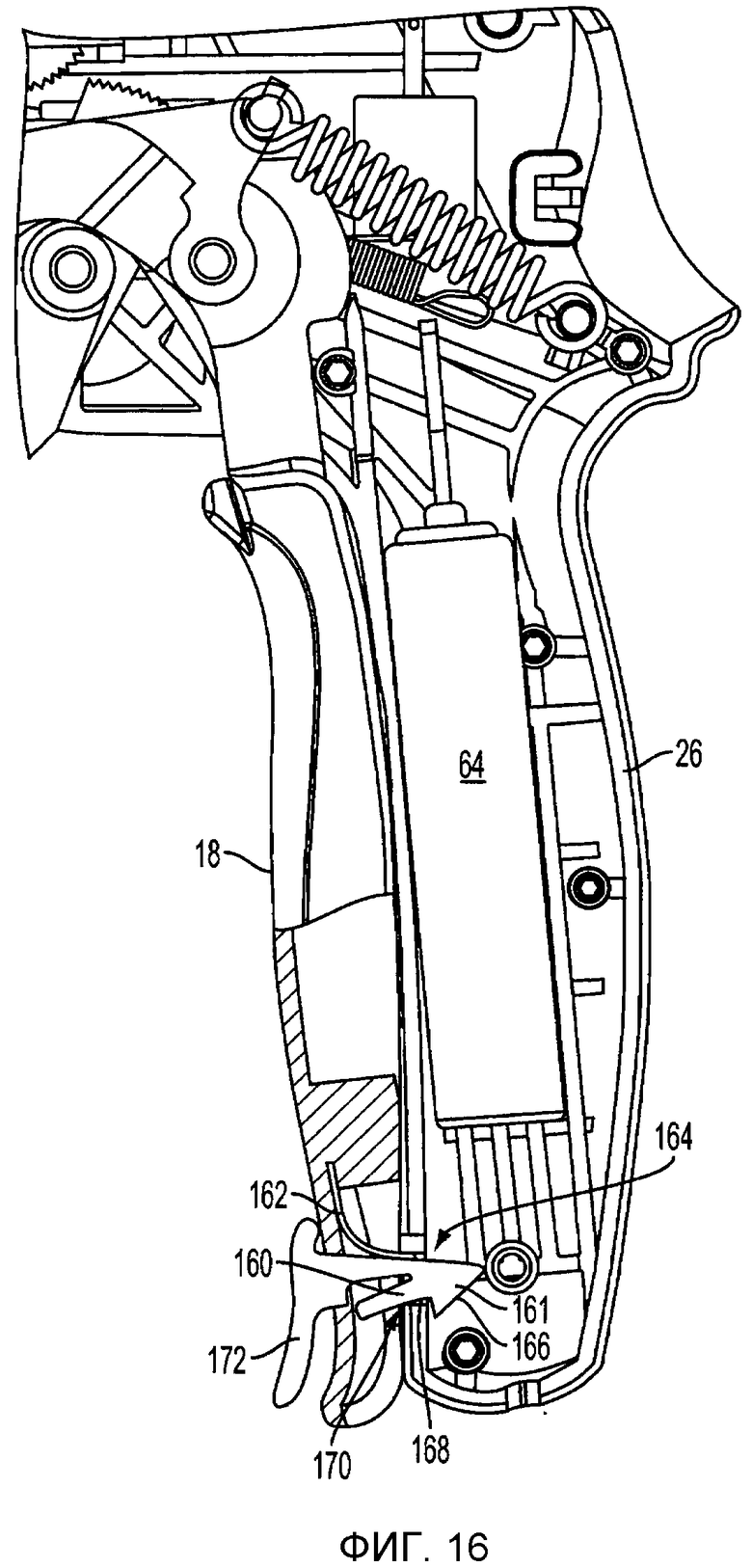
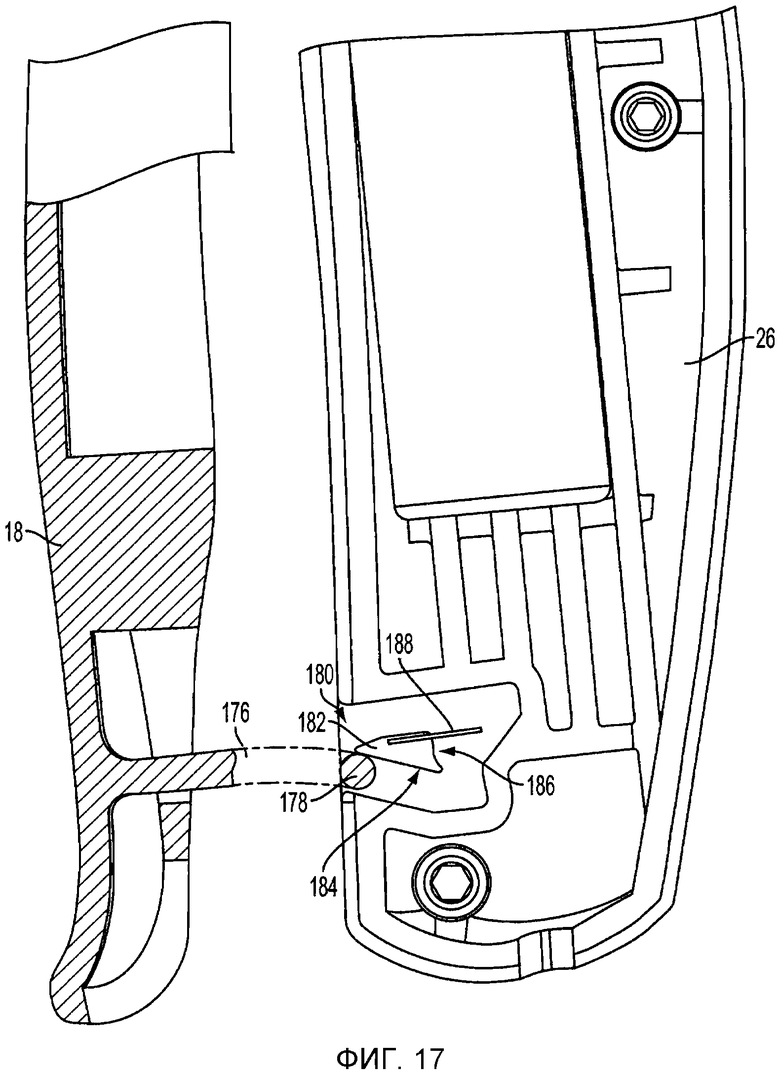
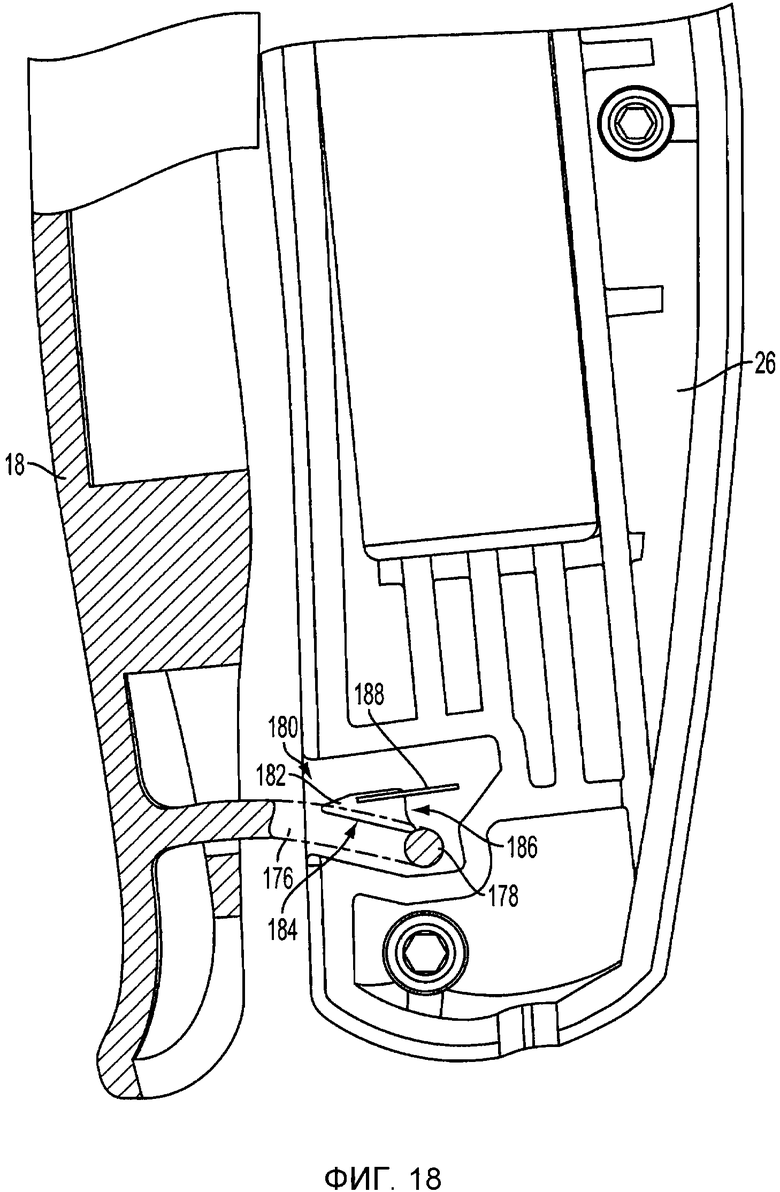

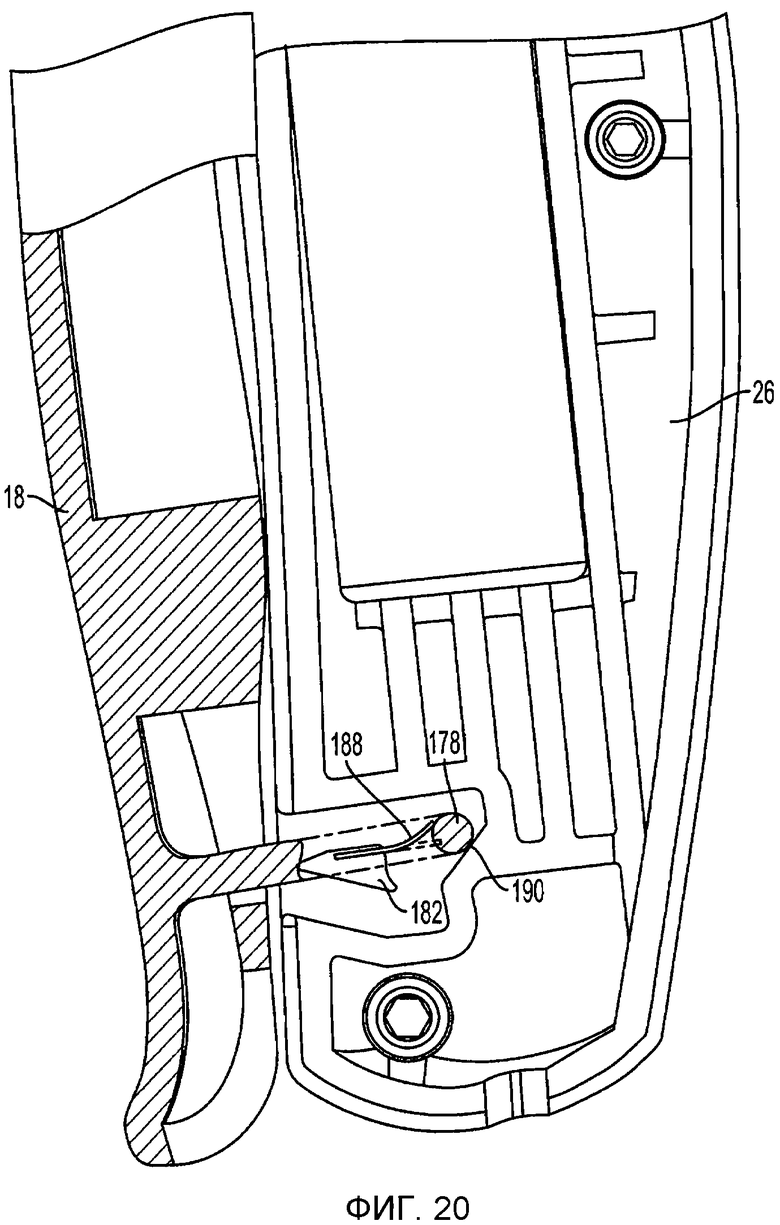
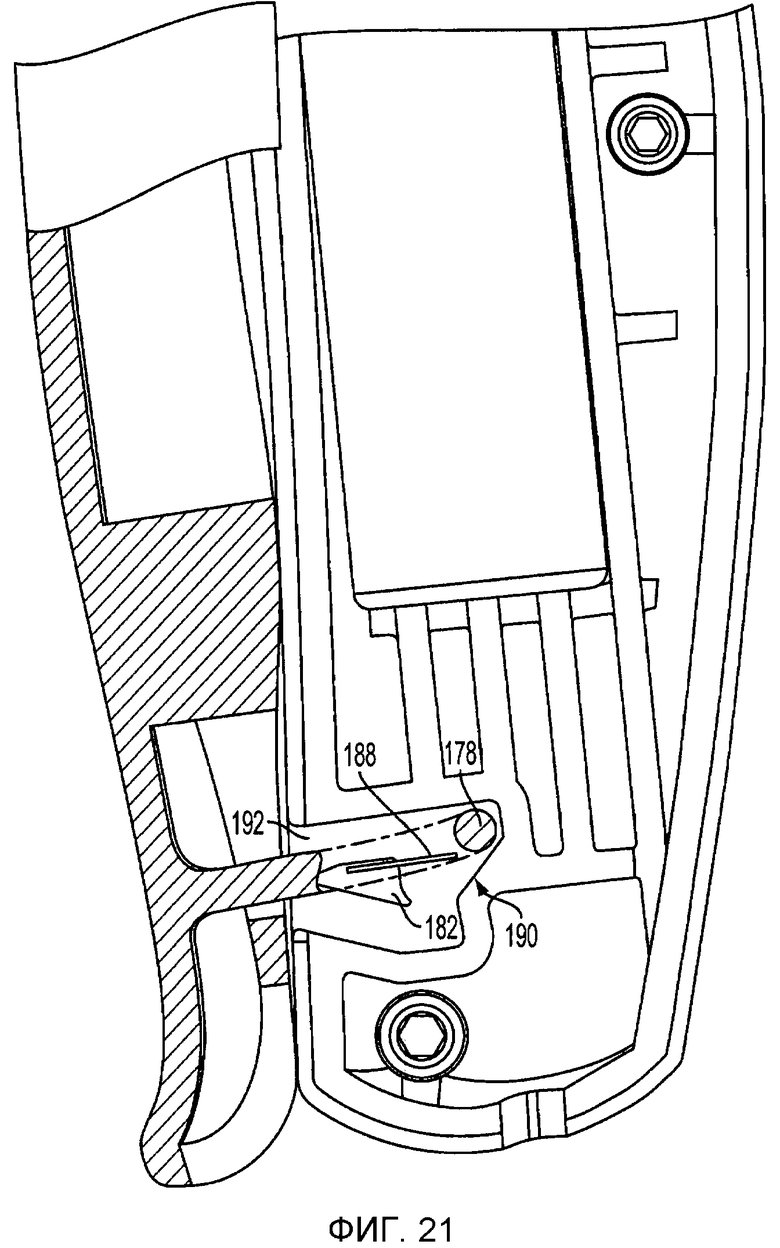

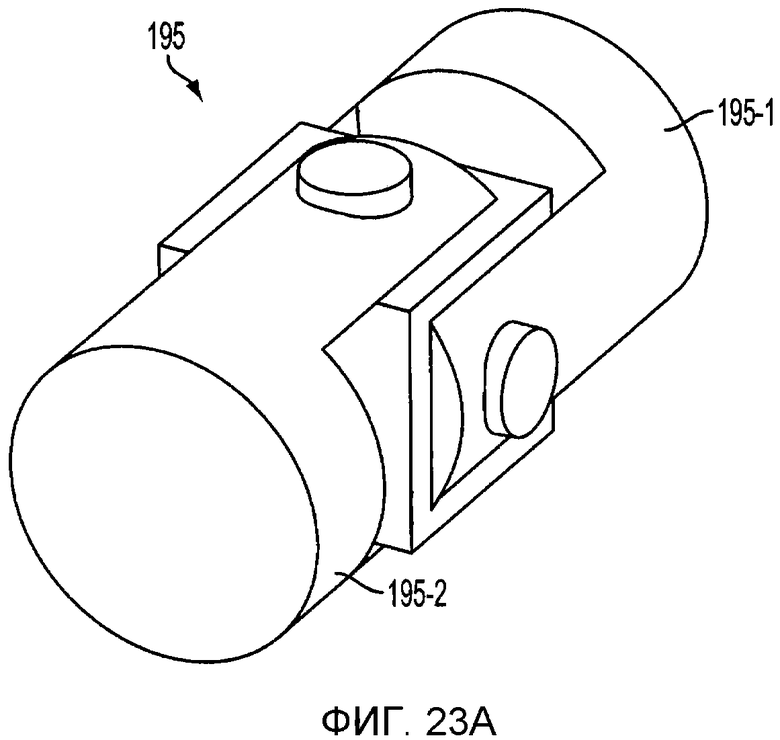
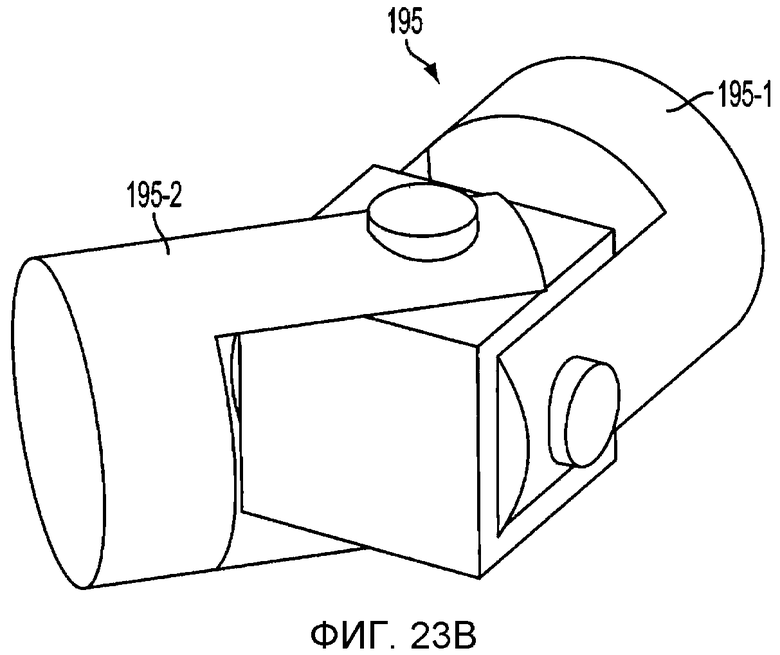

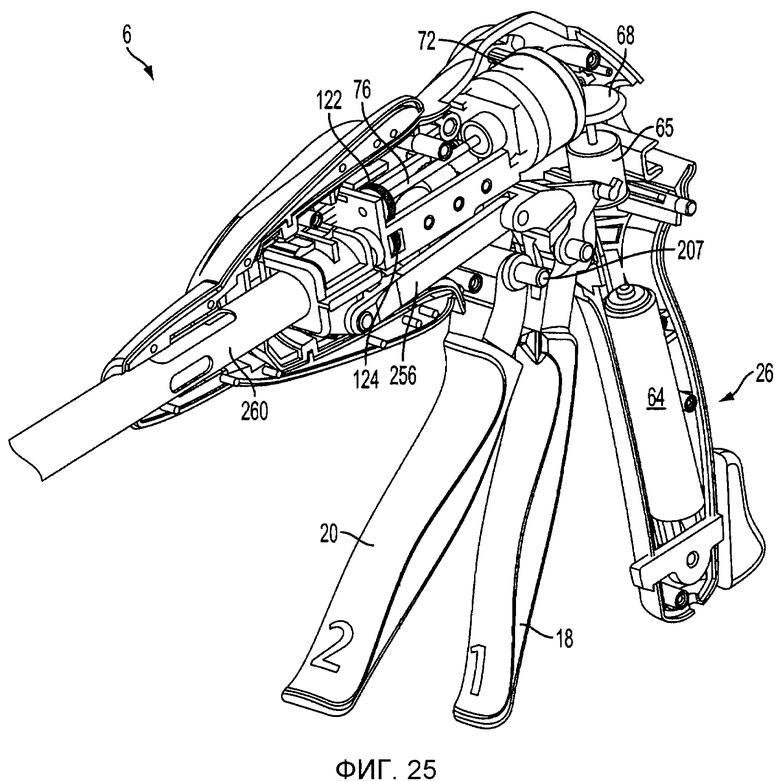
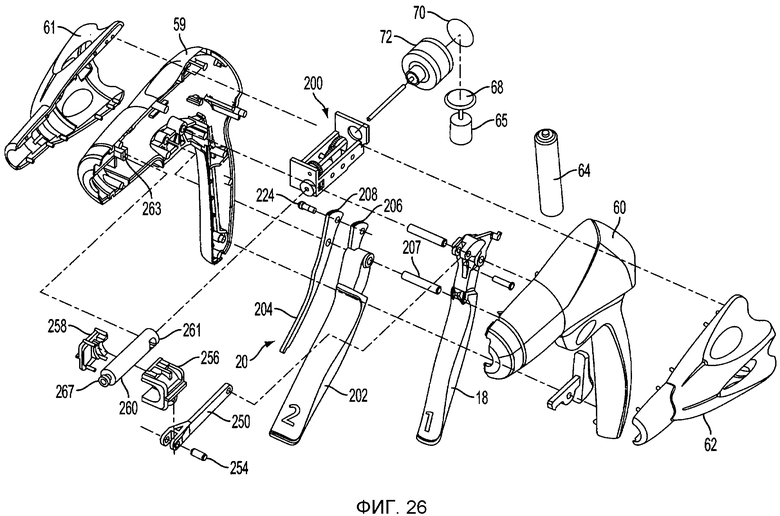
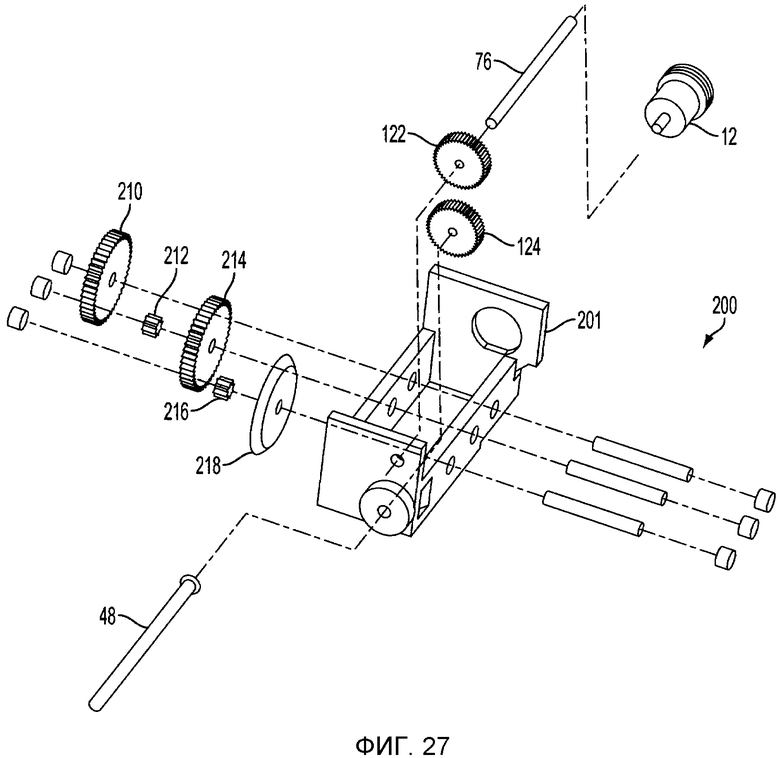
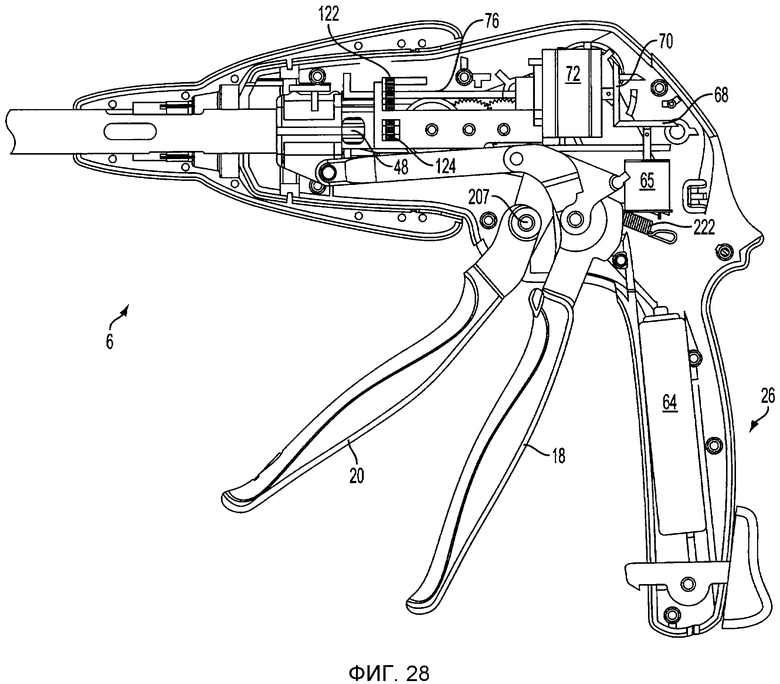
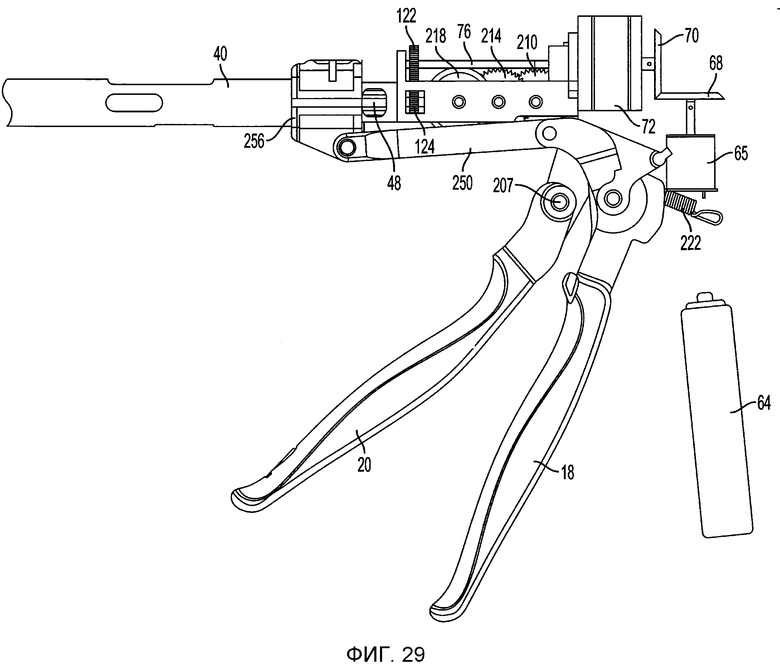
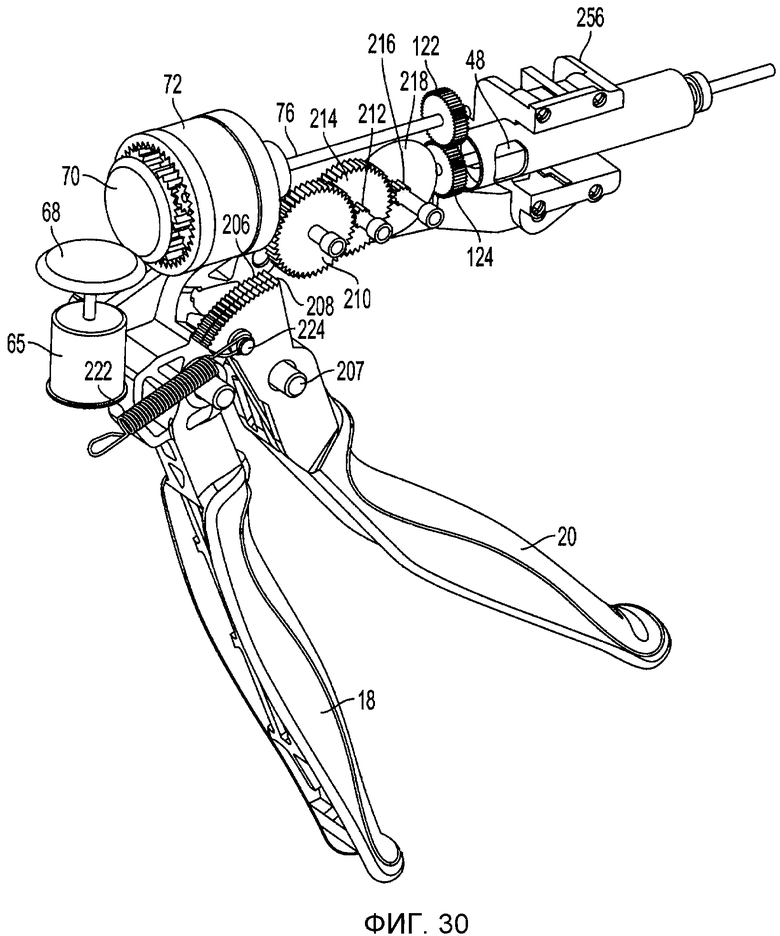
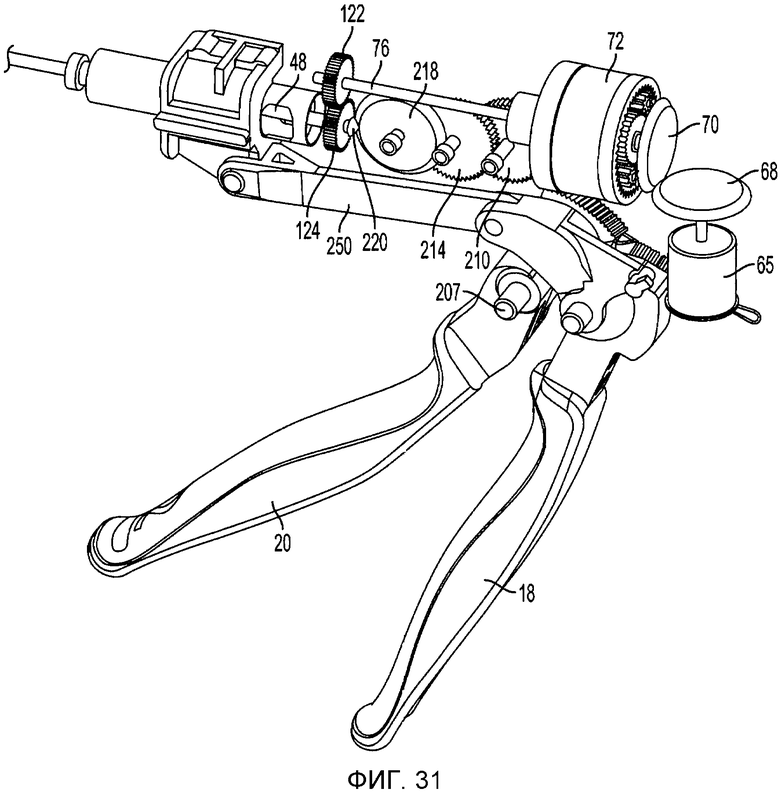
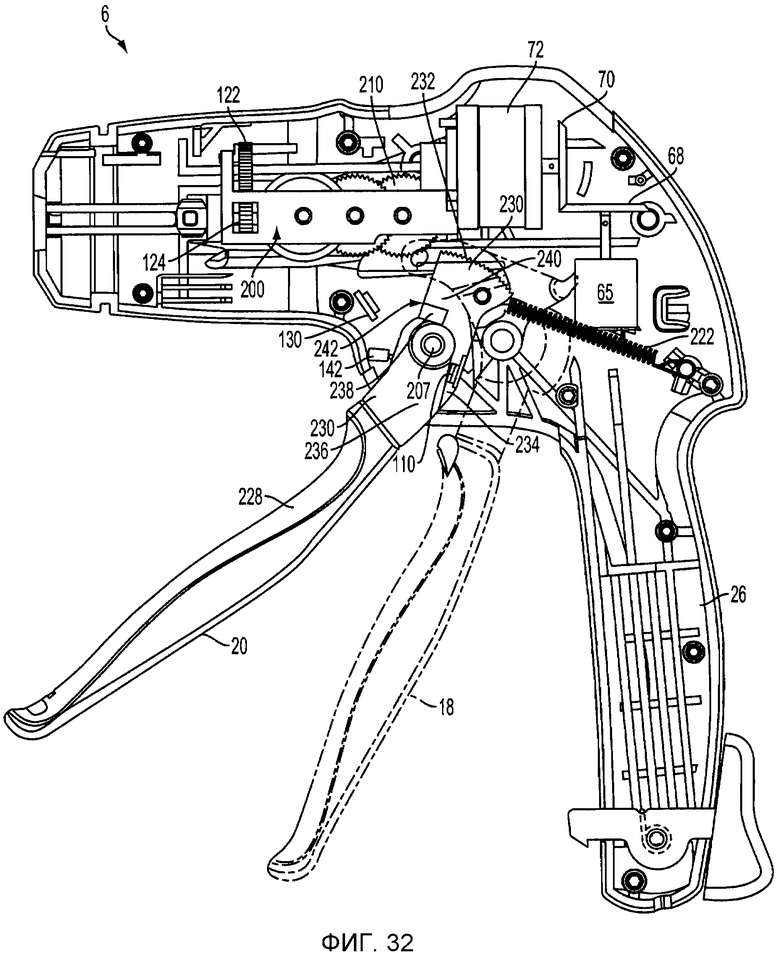
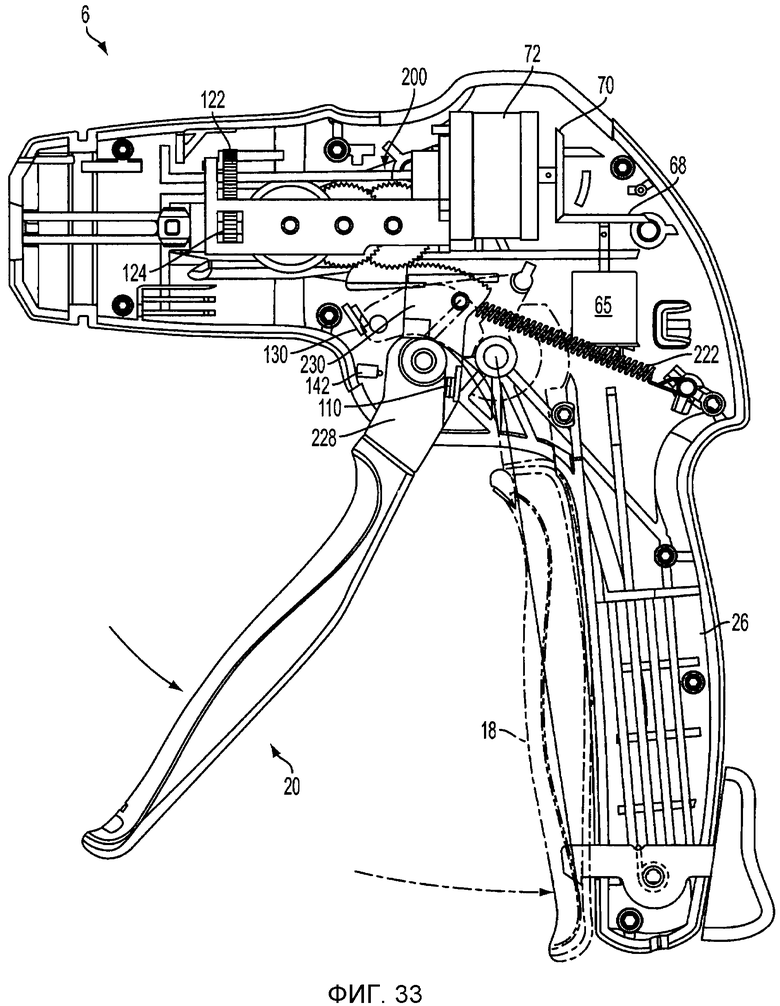
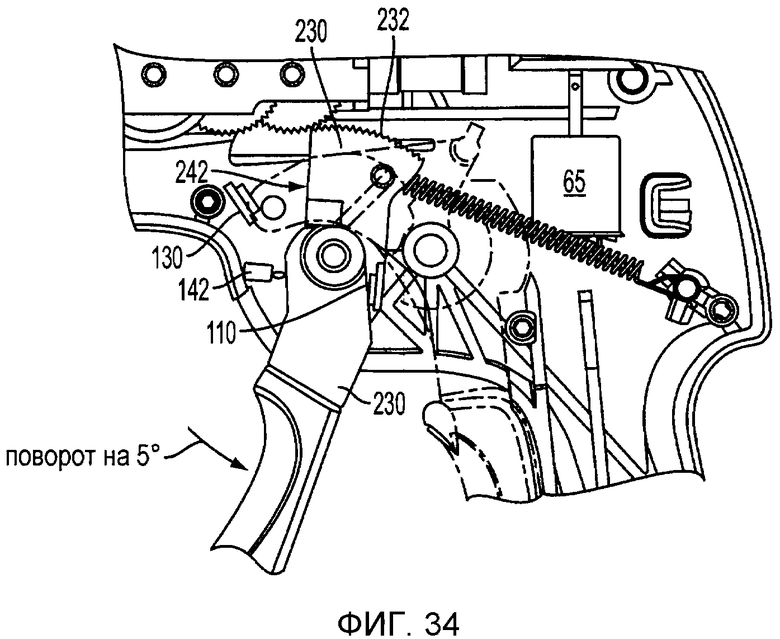
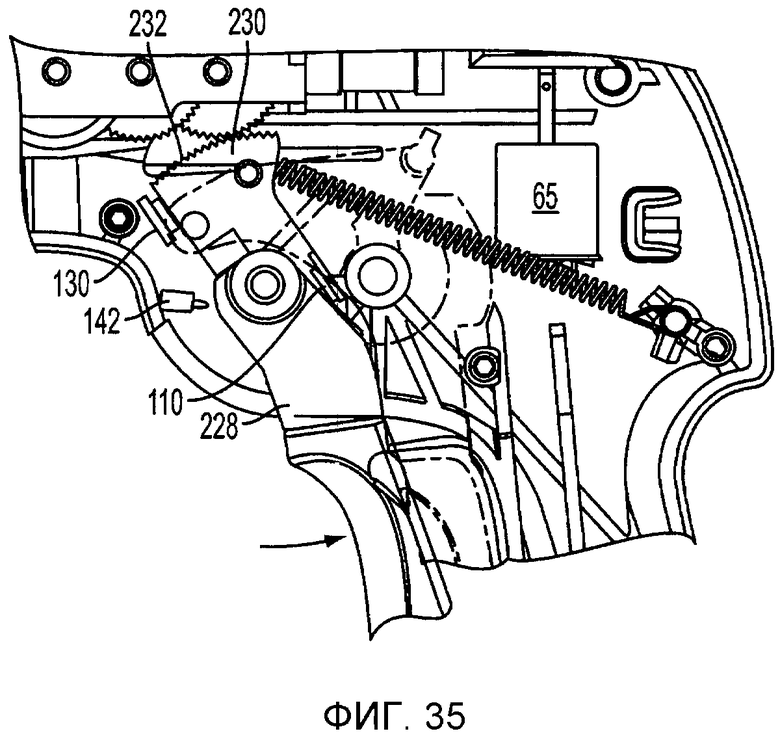
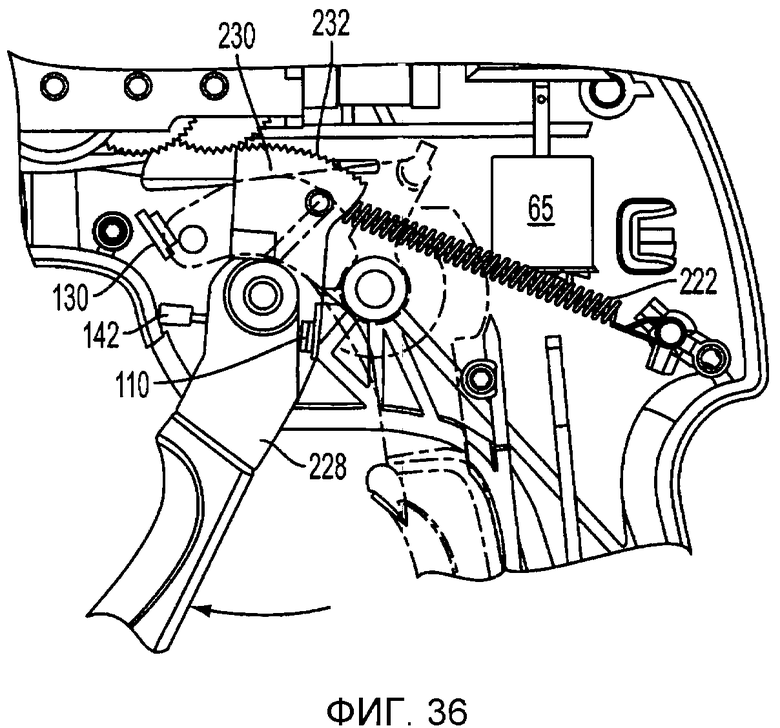
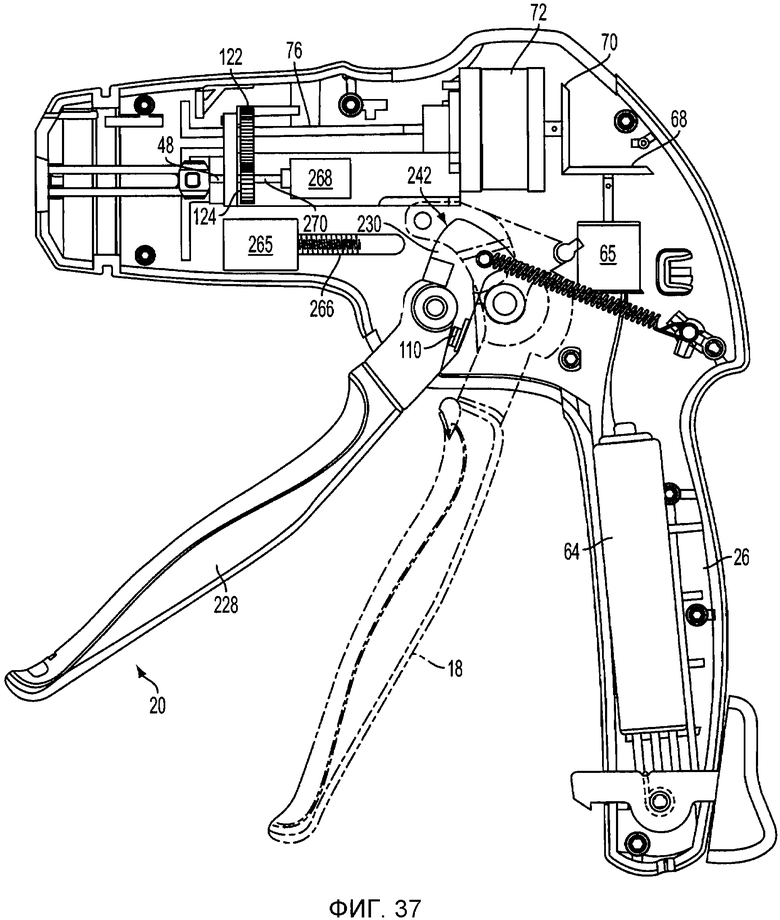
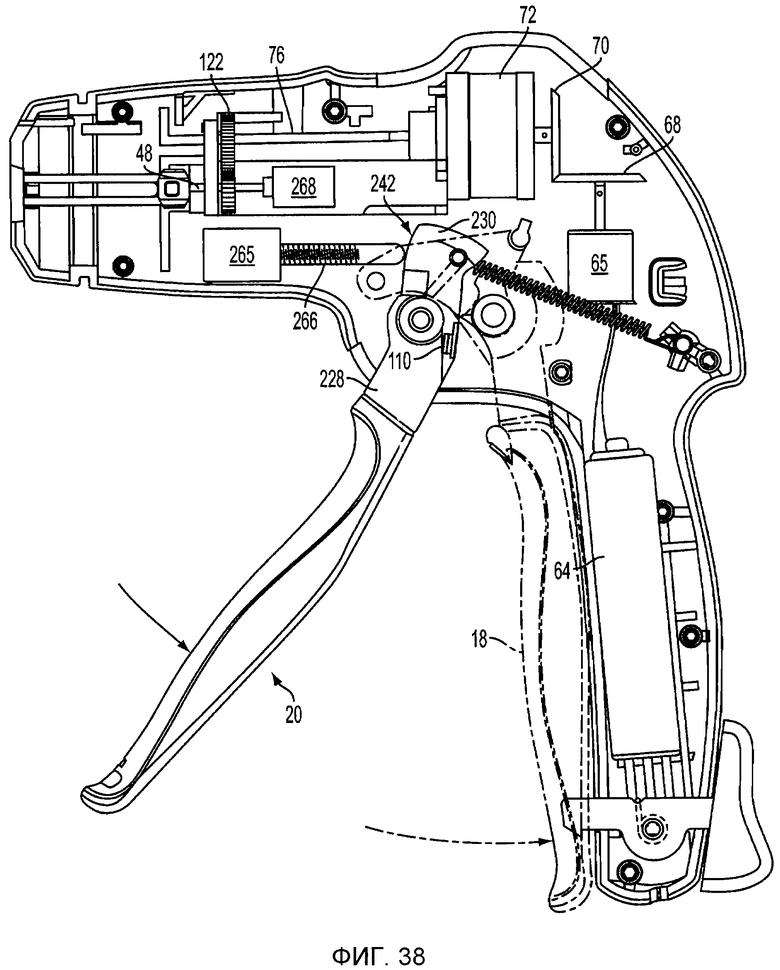

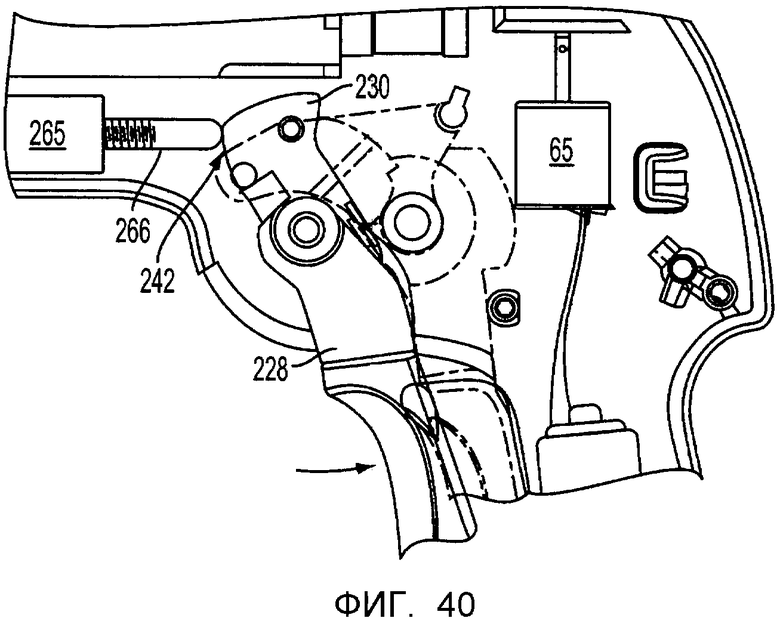
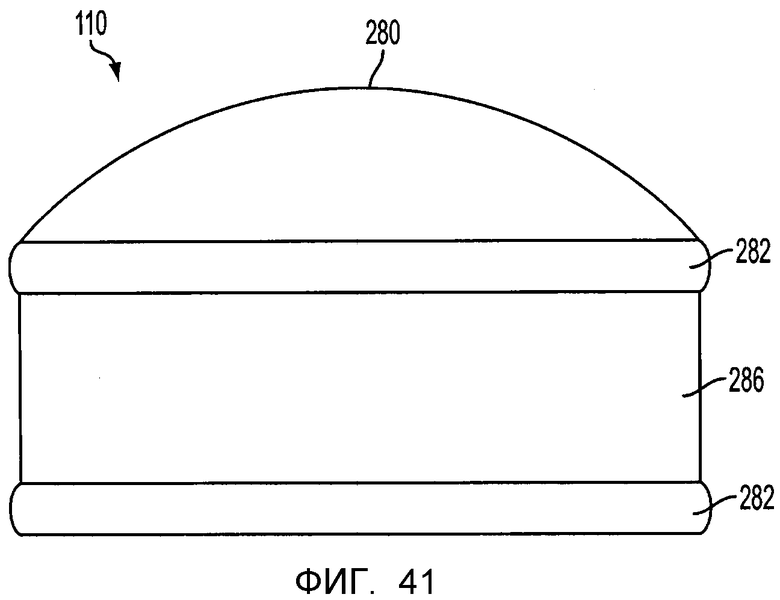

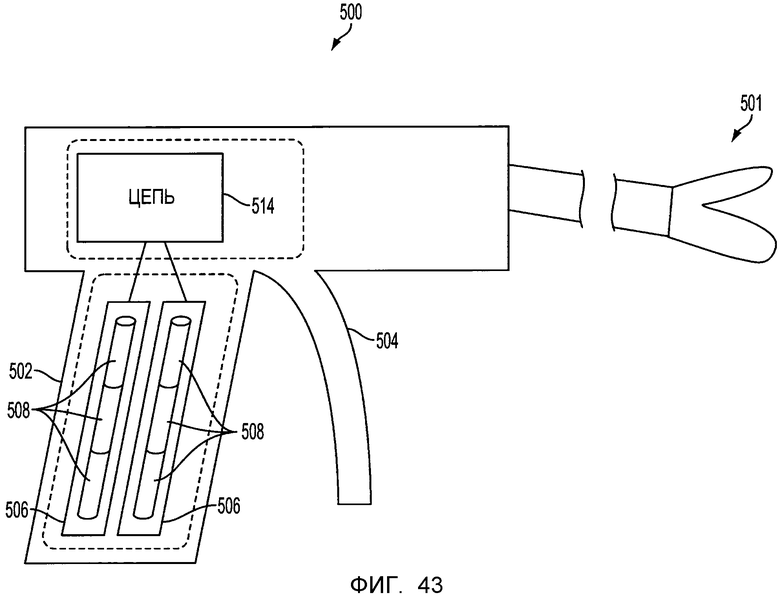
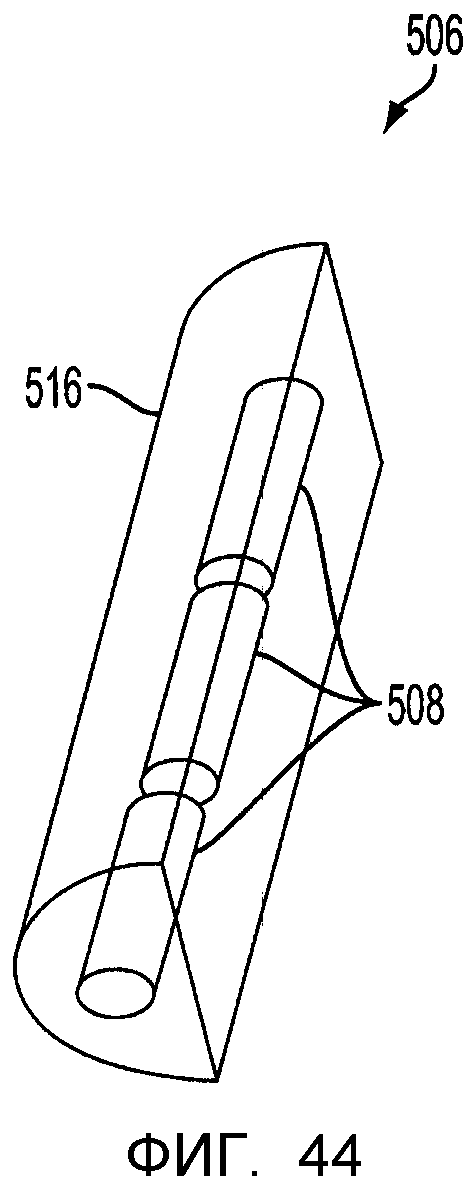
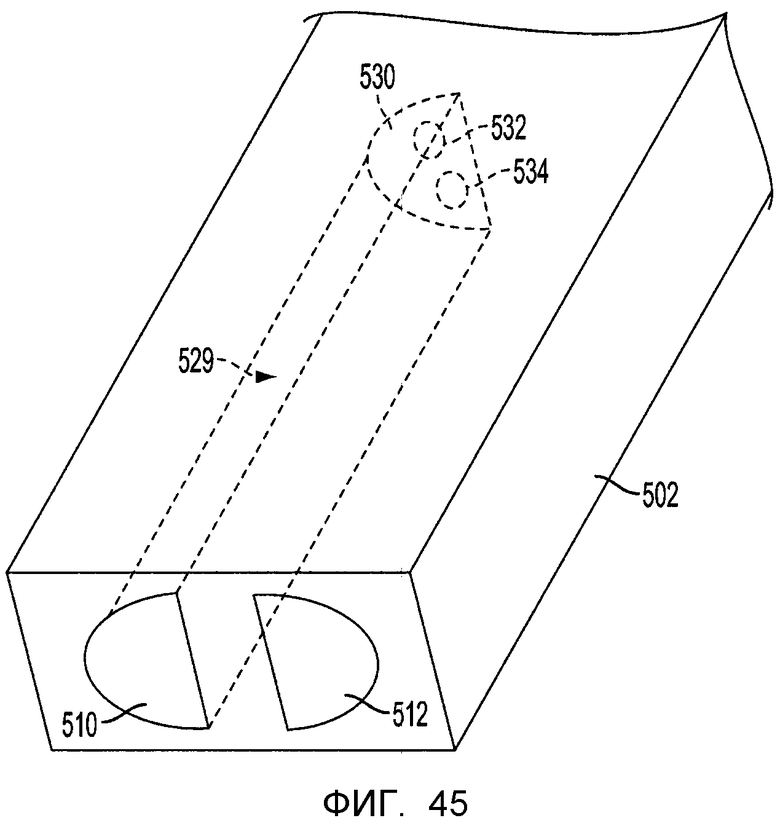
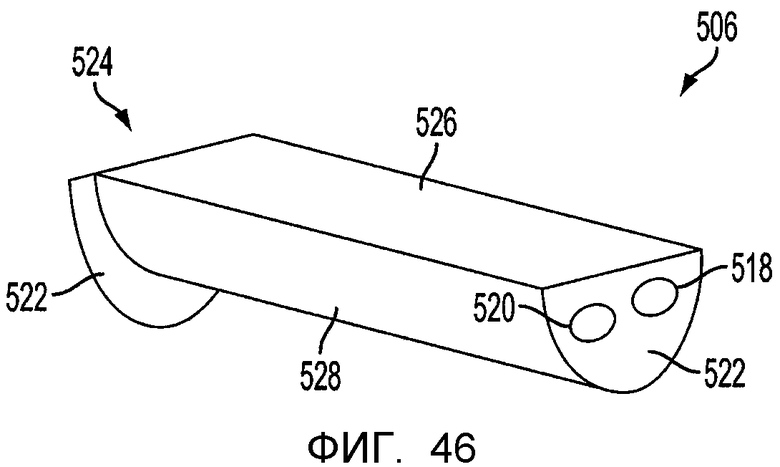
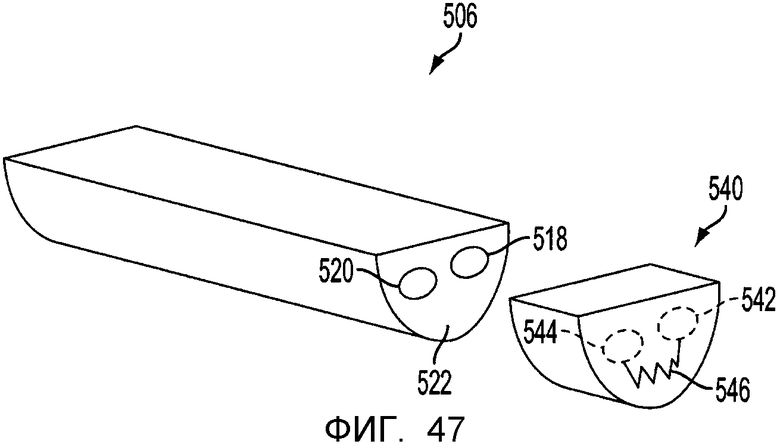

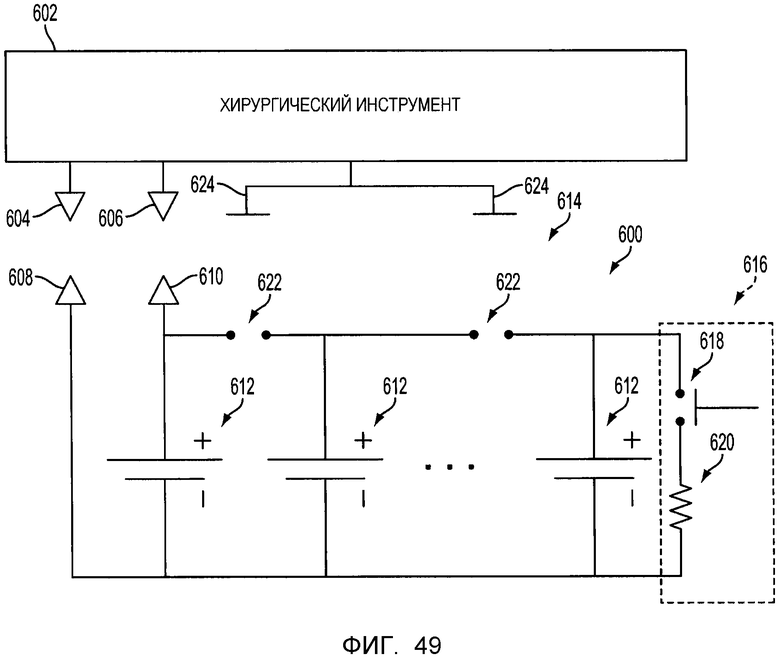
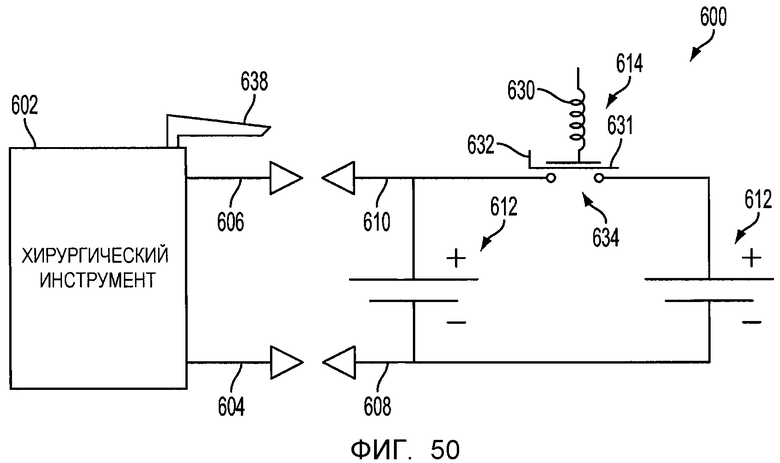
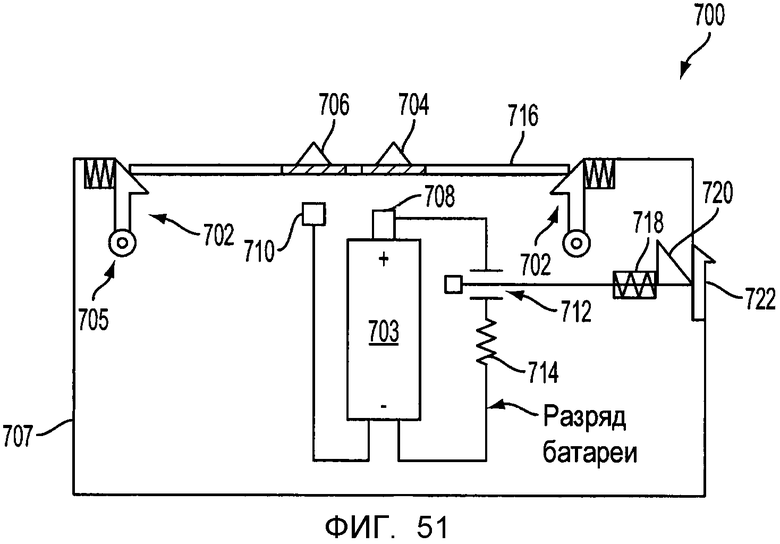
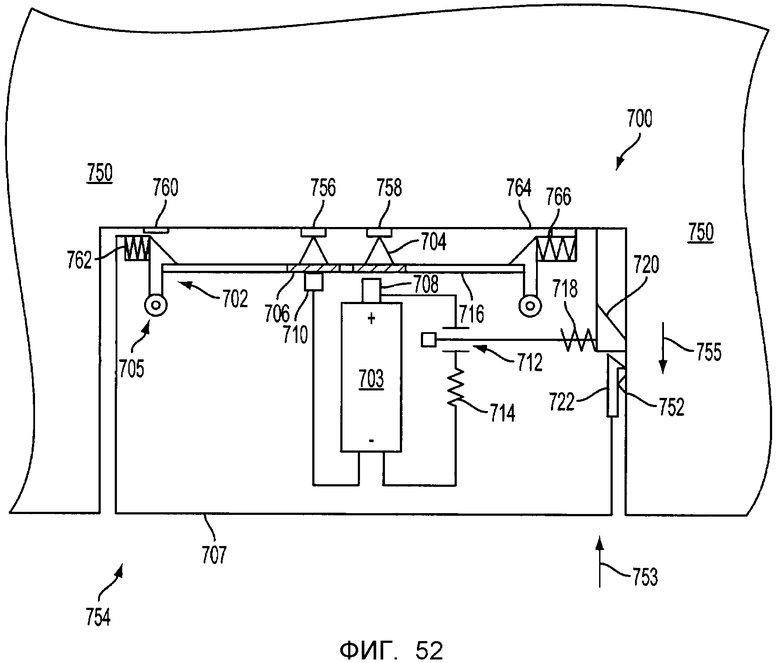
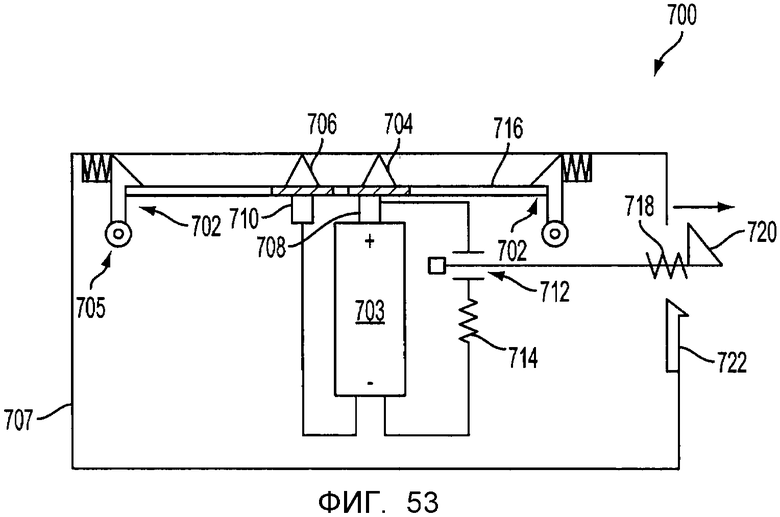
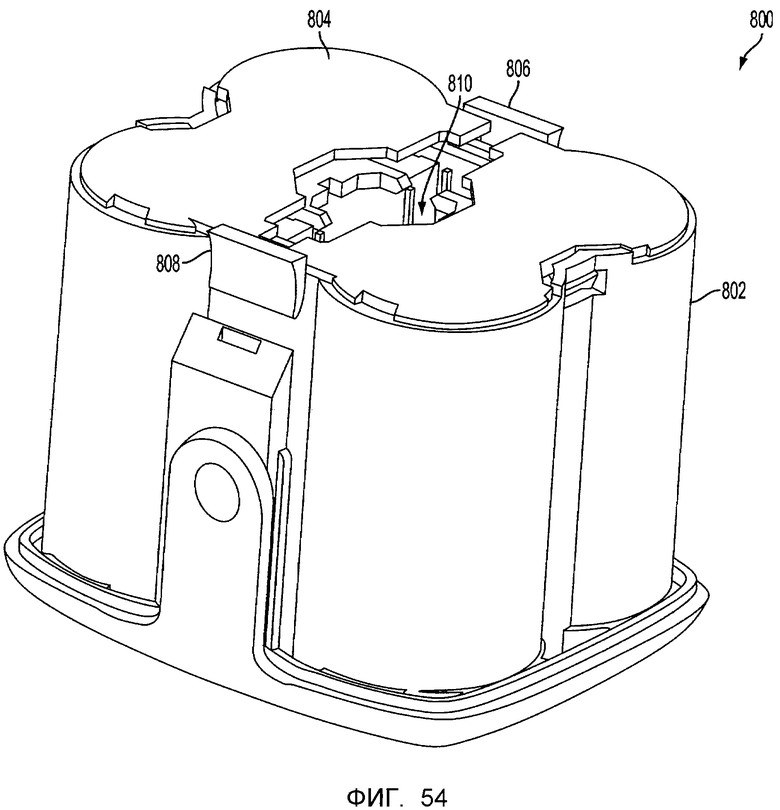
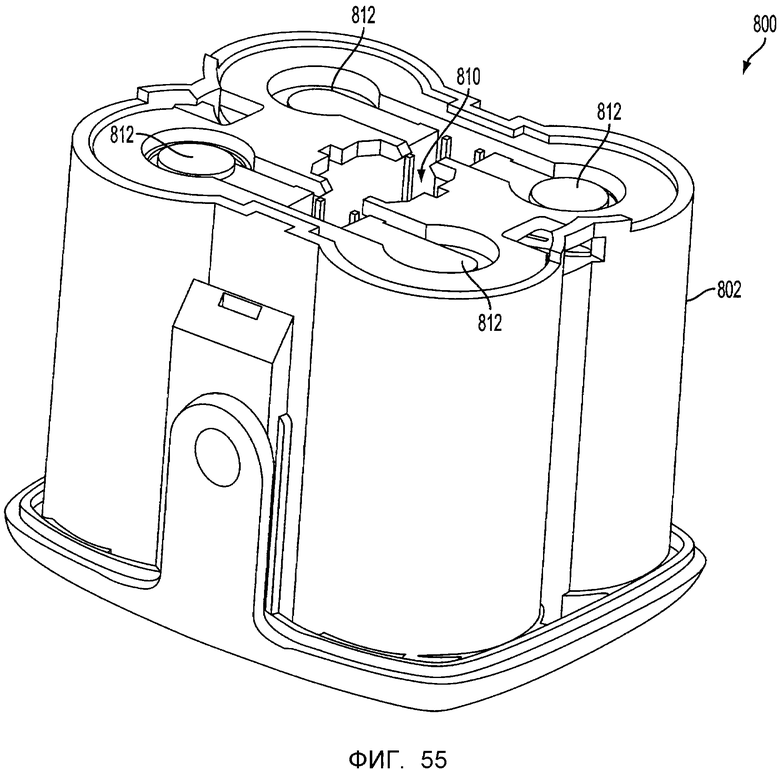

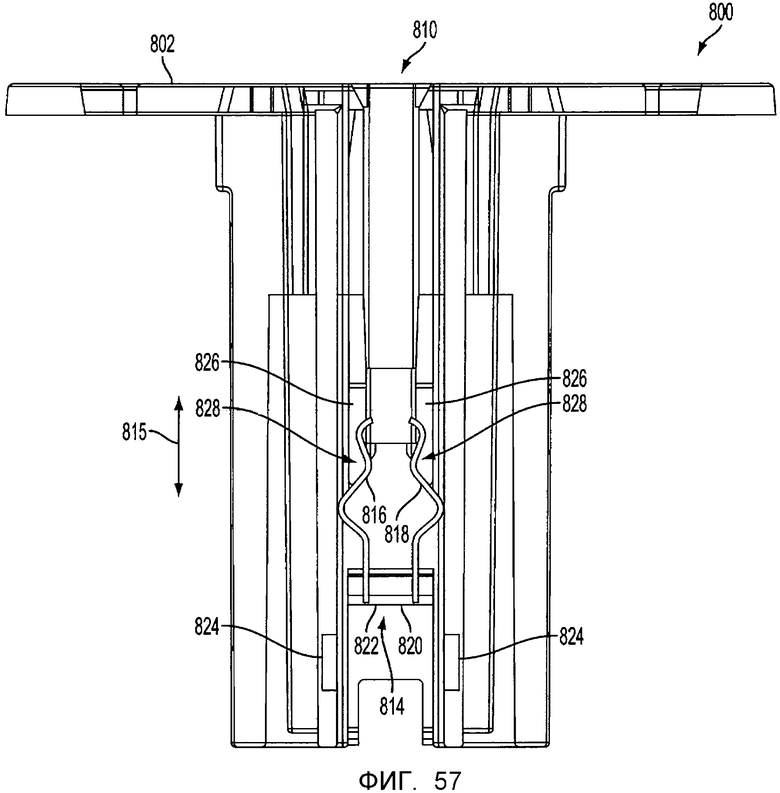
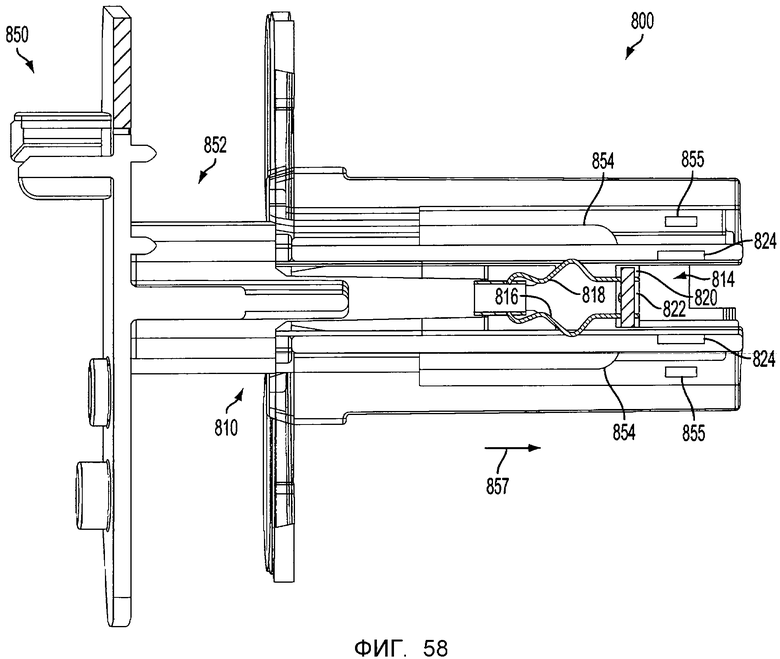

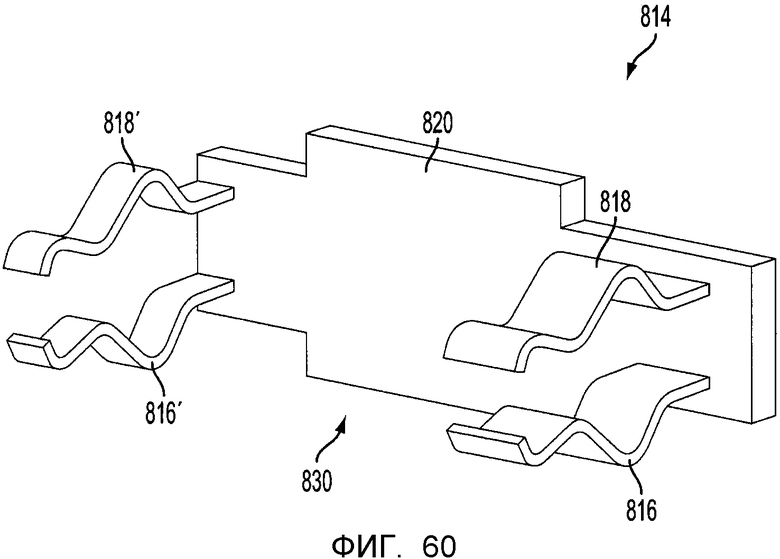
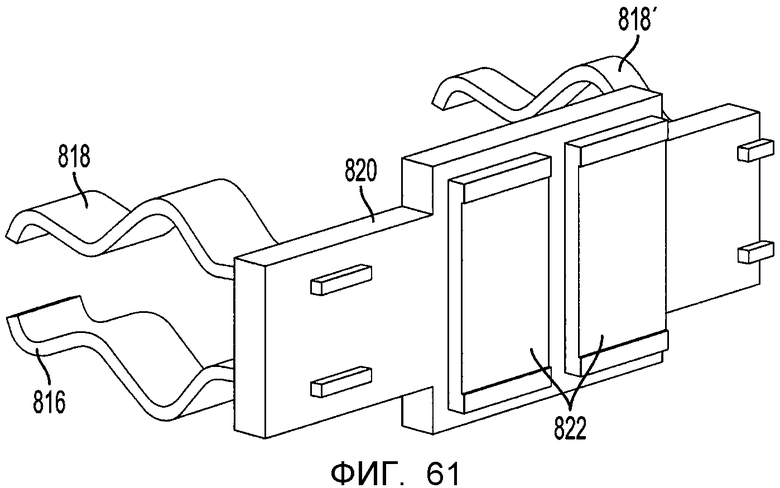
Изобретение относится к медицине. Хирургический инструмент содержит батарейные блоки. Батарейные блоки имеют множество ячеек. По меньшей мере, часть ячеек может не иметь электрических контактов друг с другом. Батарейные блоки включают переключатель или механизм соединения множества ячеек. Батарейные блоки могут включать переключатель разряда или разъем, предназначенный для электрического соединения анода батарейного блока с катодом батарейного блока, например, через резистивный элемент. Технический результат - упрощение перевозки, хранения и утилизации. 4 н. и 22 з.п. ф-лы, 63 ил.
1. Хирургический инструмент, включающий:
концевой эффектор;
рукоятку, функционально соединенную с концевым эффектором, при этом рукоятка включает спусковое устройство, приводящее в действие концевой эффектор, при этом рукоятка образует первую полость и вторую полость, первая полость имеет первую асимметричную форму в поперечном сечении, а вторая полость также имеет вторую асимметричную полость в поперечном сечении;
первый батарейный блок, расположенный в первой полости, при этом первый батарейный блок образует электрическое соединение с, по меньшей мере, одной из следующих частей: рукояткой и концевым эффектором, и при этом первый батарейный блок содержит:
первый корпус с формой в поперечном сечении, соответствующей первой асимметричной в сечении форме; и
первое множество ячеек с электрическими контактами друг с другом, расположенных в первом корпусе; и
второй батарейный блок, расположенный во второй полости, при этом второй батарейный блок образует электрическое соединение с, по меньшей мере, одной из следующих частей: рукояткой и концевым эффектором, и при этом второй батарейный блок содержит:
второй корпус с формой в поперечном сечении, соответствующей второй асимметричной в поперечном сечении форме; и
второе множество ячеек с электрическими контактами друг с другом, расположенных во втором корпусе.
2. Хирургический инструмент по п. 1, в котором концевой эффектор включает, по меньшей мере, одно устройство, выбранное из группы, включающей в себя скальпель, зажим, сшивающий инструмент, радиочастотный инструмент, ультразвуковой инструмент и лазерный инструмент.
3. Хирургический инструмент по п. 1, в котором первое множество ячеек включает по меньшей мере одну ячейку, выбранную из группы, состоящей из ячеек CR123 и CR2.
4. Хирургический инструмент по п. 1, дополнительно содержащий съемный разряжающий разъем, соединенный с первым батарейным блоком, при этом разряжающий разъем расположен таким образом, чтобы образовывать электрическое соединение анода первого батарейного блока с катодом первого батарейного блока.
5. Хирургический инструмент по п. 4, в котором разряжающий разъем расположен таким образом, чтобы образовывать электрическое соединение между анодом первого батарейного блока и катодом первого батарейного блока через первый резистивный элемент.
6. Хирургический инструмент по п. 1, в котором первая асимметричная форма в поперечном сечении является полуовальной.
7. Хирургический инструмент по п. 1, в котором первая асимметричная в поперечном сечении форма и вторая асимметричная в поперечном сечении форма представляют собой зеркальное отражение друг друга.
8. Хирургическая система, содержащая:
батарейный блок, при этом батарейный блок содержит:
корпус;
множество ячеек, расположенных в корпусе, при этом, по меньшей мере, часть из множества ячеек электрически не связана друг с другом;
первый переключатель, который может находиться в открытом положении и закрытом положении, при этом, находясь в закрытом положении, первый переключатель соединяет множество ячеек, и при этом первый переключатель механически смещен в открытое положение;
переключатель разряда, который может находиться в открытом положении и закрытом положении, при этом переключатель разряда расположен так, что в закрытом положении образует электрическое соединение анода батарейного блока с катодом батарейного блока, при этом переключатель разряда механически смещен в закрытое положение, и при этом переключатель разряда удерживается в открытом положении частью корпуса.
9. Хирургическая система по п. 8, дополнительно содержащая:
концевой эффектор;
рукоятку, функционально соединенную с концевым эффектором, при этом рукоятка включает спусковой механизм для приведения в действие концевого эффектора, при этом рукоятка образует полость, вмещающую батарейный блок, а внутренняя стенка полости имеет ключевую часть, соответствующую защелке эффектора с ключом и расположенную так, чтобы соприкасаться с защелкой эффектора при вставке батарейного блока в полость и переводить эффектор в свободное положение, а первый переключатель - в закрытое положение.
10. Хирургическая система по п. 9, в которой концевой эффектор включает, по меньшей мере, одно устройство, выбранное из группы, включающей в себя: скальпель, зажим, сшивающий инструмент, радиочастотный инструмент, ультразвуковой инструмент и лазерный инструмент.
11. Хирургическая система по п. 8, в которой эффектор дополнительно расположен так, чтобы удерживать первый переключатель в закрытом положении, если эффектор находится в заблокированном состоянии.
12. Хирургическая система по п. 8, в которой часть корпуса имеет такую конфигурацию, чтобы двигаться относительно переключателя разряда при вставке батарейного блок в хирургический инструмент.
13. Хирургическая система по п. 12, в которой часть корпуса включает панель, выполненную с возможностью скольжения.
14. Хирургическая система по п. 8, в которой разряжающий разъем расположен таким образом, чтобы образовывать электрическое соединение между анодом батарейного блока и катодом батарейного блока, когда он находится в закрытом положении, через резистивный элемент.
15. Хирургическая система по п. 8, в которой множество ячеек включает, по меньшей мере, одну ячейку, выбранную из группы, состоящей из ячеек CR123 и CR2.
16. Хирургическая система по п. 8, в которой батарейный блок дополнительно включает эффектор, расположенный в непосредственной близости от первого переключателя, при этом эффектор может находиться в заблокированном и свободном положении, при этом эффектор расположен таким образом, чтобы, находясь в заблокированном состоянии, препятствовать переходу первого выключателя из открытого в закрытое положение; при этом эффектор содержит защелку с ключом для перехода эффектора из заблокированного в свободное состояние.
17. Хирургическая система, содержащая:
батарейный блок, при этом батарейный блок содержит:
множество ячеек, при этом, по меньшей мере, часть из множества ячеек электрически не связана друг с другом;
корпус, имеющий внутреннюю полость с, по меньшей мере, одной стенкой внутренней полости, при этом, по меньшей мере, одна стенка внутренней полости содержит первый электрод, электрически соединенный с анодом батарейного блока, и второй электрод, электрически соединенный с катодом батарейного блока;
разряжающий разъем батареи, расположенный во внутренней полости, при этом разряжающий разъем включает первый и второй контакты, электрически соединенные друг с другом, при этом первый и второй контакты образуют соединения с, по меньшей мере, одной стенкой внутренней полости, при этом разряжающий разъем батареи может располагаться в первом положении во внутренней полости, когда первый и второй контакты не соединены с первым и вторым электродами, и во втором положении, когда первый контакт соединен с первым электродом, а второй контакт электрически соединен со вторым электродом.
18. Хирургическая система по п. 17, в которой первый и второй контакты образуют электрическое соединение друг с другом через резистивный элемент.
19. Хирургическая система по п. 17, в которой батарейный блок дополнительно включает, по меньшей мере, один зацепляющий элемент, расположенный таким образом, чтобы входить в зацепление с первым либо вторым контактом, чтобы удерживать разряжающий разъем батареи в первом положении.
20. Хирургическая система по п. 17, дополнительно содержащая:
концевой эффектор;
рукоятку, функционально соединенную с концевым эффектором, при этом рукоятка включает спусковой механизм для приведения в действие концевого эффектора, при этом рукоятка образует полость, вмещающую батарейный блок, при этом рукоятка включает разъем, расположенный таким образом, чтобы соединять множество ячеек друг с другом при вставке батарейного блока в полость, и при этом рукоятка имеет удлиняющий элемент, расположенный так, чтобы соприкасаться с разряжающим разъемом батареи при вставке батарейного блока в полость для перемещения разряжающего разъема во второе положение.
21. Хирургическая система по п. 20, в которой концевой эффектор включает, по меньшей мере, одно устройство, выбранное из группы, включающей в себя: скальпель, зажим, сшивающий инструмент, радиочастотный инструмент, ультразвуковой инструмент и лазерный инструмент.
22. Хирургическая система по п. 17, в которой множество ячеек включает, по меньшей мере, одну ячейку, выбранную из группы, состоящей из ячеек CR123 и CR2.
23. Хирургический инструмент, содержащий:
концевой эффектор;
рукоятку, функционально соединенную с концевым эффектором, при этом рукоятка включает спусковой механизм для приведения в действие концевого эффектора, при этом рукоятка образует полость;
батарейный блок, расположенный в полости, при этом батарейный блок образует электрическое соединение с, по меньшей мере, одной из следующих частей: рукояткой и концевым эффектором, и при этом батарейный блок включает в себя
корпус; и
множество ячеек; и
подвижный лепесток, при этом подвижный лепесток имеет первое положение, когда он электрически разделяет по меньшей мере часть множества ячеек, и второе положение, когда он не разделяет множество ячеек.
24. Хирургический инструмент по п. 23, в котором рукоятка дополнительно включает крючок, расположенный в первой полости и совмещенный с подвижным лепестком, при этом крючок расположен так, чтобы переводить подвижный лепесток из первого положения во второе положение при вставке батарейного блока в полость.
25. Хирургический инструмент по п. 23, в котором концевой эффектор включает, по меньшей мере, одно устройство, выполненное из группы, включающей в себя: скальпель, зажим, сшивающий инструмент, радиочастотный инструмент, ультразвуковой инструмент и лазерный инструмент.
26. Хирургический инструмент по п. 23, в котором множество ячеек включает, по меньшей мере, одну ячейку, выбранную из группы, состоящей из ячеек CR123 и CR2.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Установка для испытания материала | 1973 |
|
SU528478A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 6482200 B2, 19.11.2002 | |||
| Устройство для соединения трубчатых органов | 1987 |
|
SU1475611A1 |

