Изобретение относится к деревообработке и может найти применение при создании пилорам нетрадиционной компоновки с неподвижным в процессе распиловки материалом (бревном). Известны пилорамы, содержащие прижимные и приводные вальцы проталкивающие бревно сквозь пильную раму, совершающую возвратно-поступательное движение в вертикальной плоскости, спереди и сзади бревно закрепляется на поддерживающих тележках (патент на изобретение RU 2038948).
Недостатки бревно при такой обработке раскачивается, снижается точность пропила, увеличивается количество отходов, а площадь, занимаемая пилорамой почти вдвое больше предлагаемой компоновки пилорамы-автомата.
Известны конструкции лесопильной рамы, которая также предназначена для распиловки бревен на доски и как остальные пилорамы распиливает бревна, которые в процессе обработки проходят сквозь пильную раму с вальцовым механизмом подачи и также поддерживается передней и задней подвижными тележками.
Прототипом предполагаемого изобретения является (патент RU 2395387). По точности распила, по количеству отходов, по производительности, по автоматизации цикла обработки известное изобретение уступает предлагаемой конструкции.
Технический результат изобретения выражается в повышении качества пропила, снижении количества отходов, сокращению площадей, занимаемых пилорамой, автоматизации цикла обработки.
Технический результат достигается тем, что в пилораме-автомат, включающей опорную раму (станину) с направляющими вдоль плоскости режущего инструмента, раму с плоскими пилами с возможностью перемещения в вертикальной плоскости, каретку, опоры для установки распиливаемого материала, прижимные устройства, каретка с пильной рамой расположены на направляющих станины с возможностью перемещения при распиливании бревна на доски, опоры расположены в нижней части станины с возможностью отвода и подвода в вертикальном направлении в процессе распиливания, прижимные устройства выполнены в виде откидных зажимов, расположенных против каждого опорного элемента в верхней части станины, с возможностью разжима и последующего зажима распиливаемого материала соответственно при подходе и проходе каретки с пильной рамой, при этом пилорама выполнена с возможностью автоматической загрузки заготовок и разгрузки распиленного материала и автоматическим циклом распиловки.
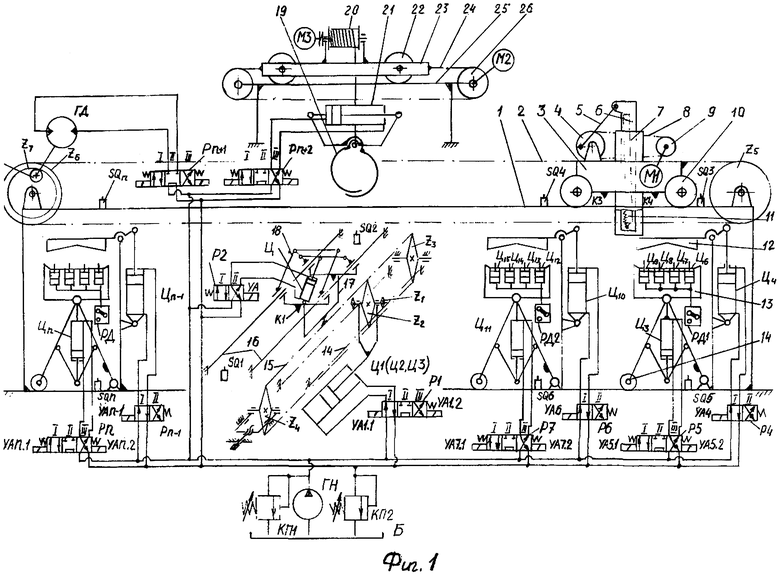
Изобретение поясняется гидрокинематической схемой пилорамы Фиг.1.
Пилорама-автомат содержит опорную раму 1 по направляющим которой посредством цепи (троса) 2 и привода с гидродвигателем ГД со скоростью рабочей подачи перемещается каретка 3 на роликах 10. на каретке находится электродвигатель M1, приводящий во вращение посредством передачи 8 кривошипные диски 4 и через шатуны 5, верхние головки шарнирно соединены с пильной рамой 6, которая благодаря этому совершает вертикальные возвратно-поступательные движения в направляющих корпуса, установленных на каретке 3. Пакет требуемого количества пил 11 крепится в пильной раме 6, а на корпусе 7 позади каждой пилы установлена расклинивающая пластина, препятствующая зажиму пил (на схеме не указана).
При исходном (на фиг.1) правом положении каретки 3 производится загрузка заготовки (бревна, бруса) на подводимые опоры на раме 1 в следующем порядке. Сначала крайние и средняя подводимые опоры 13 выдвигаются вверх, на них посредством тройного (на схеме показано одно) рамочного загрузочного устройства (ЗУ) производится подача заготовки снизу и сбоку на выдвинутые подводимые опоры, при этом распределителем P1 (I) масло под давлением подается в нижнюю (поршневую) полость Ц1 и его поршень, перемещаясь вверх, звездочкой Z2 перемещает цепь 15, натянутую на звездочках Z3 и Z4 а вместе с цепью кронштейн 17 и рамку 18 по направляющим 16 с загружаемым бревном, кулачок К2 воздействует на путевой выключатель SQ2, рамка 18 останавливается, а бренно скатывается на подведенные опоры 13, и рамка 18 возвращается на исходную позицию, захватывая следующее бревно.
Откидными зажимами 12 производится зажим бревна на трех выдвинутых опорах цилиндрами Ц4, Цn/2 и Цn (где n - число отводимых опор и соответственно откидных зажимов). Окончание зажима бревна этими тремя зажимами происходит после срабатывания трех РД (реле давления), связанных с пакетами гидроцилиндров Ц6, Ц7, Ц8, Ц9 и др., расположенных на подводимых опорах 13. Команда от трех РД подает сигнал на подвод остальных подводимых опор и откидных зажимов, при этом производится окончательный зажим заготовки и подается команда на включение привода главного движения M1 и включается ГД, который через редуктор и цепную (тросовую) передачу осуществляет рабочую подачу каретки 3 с пильной рамой 6 и корпусом 7.
При подходе каретки 3 к первой отводимой опоре 13 и откидному зажиму 12 кулачок К3 воздействует на путевой выключатель SQ3, который переводит Р4 в положение II, а Р5 в положение I, при этом Ц4 отводит зажим 12 от заготовки, а Ц3 отводит опору 13 вниз, давая, таким образом, пильной раме 6 с кареткой 3 продолжать рабочую подачу, когда же они проходят зону опор кулачок К4, воздействуя на тот же SQ3 возвращает распределители Р4 и Р5 соответственно в положения I и III, что возвращает поршни цилиндров Ц4 и Ц3 в прежнее положение. Происходит зажим заготовки после прохода каретки 3, и так происходит на протяжении всей обработки заготовки: при подходе каретки 3 зажимы откидываются, отводимые опоры опускаются, пропуская каретку, а после прохода каретки опоры и зажимы снова зажимают заготовку. Во время всей обработки бревно остается неподвижным, а самоустанавливающиеся опоры с зажимами фиксируют его в определенном постоянном положении, обеспечивая требуемую точность пропила.
После окончания обработки по команде SQn двигатель М2 посредством троса 24, намотанного на барабане 26 перемещает каретку 23 на роликах 22 по раме 25 до момента пока захваты 19 не окажутся над распиленным бревном. В промежутках между зажимами подается команда на раскрытие захватов 19 гидроцилиндром 21, после чего электродвигатель М3 вращая барабан 20 опускает захват на пакет досок распиленного бревна. Гидроцилиндр 21 сводит захват 19, подается команда на отвод откидных зажимов 12 и пакет досок поднимается электродвигателем М3 вверх, а электродвигатель М2 смещает каретку 23, перенося доски к транспортной тележке. Захваты с досками опускаются, раскрываются и укладывают доски на транспортную тележку (на схеме не показано). Затем подается команда на опускание всех отводимых опор и отвод каретки 3 в исходное положение. Подается команда на поднятие трех подводимых опор (крайних и средней) и загрузку очередной заготовки. Цикл повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫТОВАЯ ПИЛОРАМА | 2008 |
|
RU2395387C2 |
| УСТРОЙСТВО ДЛЯ ПРОДОЛЬНОЙ РАСПИЛОВКИ БРЕВЕН | 1998 |
|
RU2143337C1 |
| ЛЕНТОЧНОПИЛЬНЫЙ СТАНОК | 2012 |
|
RU2547551C2 |
| ПИЛОРАМА | 1994 |
|
RU2038948C1 |
| КРУГЛОПИЛЬНЫЙ СТАНОК ДЛЯ РАСПИЛОВКИ ДРЕВЕСИНЫ | 2006 |
|
RU2319606C2 |
| Многопильный станок для продольной распиловки короткомерных бревен | 1982 |
|
SU1066804A1 |
| ПИЛОРАМА ЛЕНТОЧНАЯ САМОХОДНАЯ | 2011 |
|
RU2478281C2 |
| Ленточнопильный станок | 1986 |
|
SU1397284A1 |
| Станок для одновременной распиловки в поперечном направлении длинных древесных сортаментов на части | 1924 |
|
SU1393A1 |
| СПОСОБ ПРОДОЛЬНОЙ РАСПИЛОВКИ СОРТИМЕНТОВ И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365490C1 |
Изобретение относится к деревообработке и может найти применение при создании пилорам нетрадиционной компоновки с неподвижным в процессе распиловки материалом. Пилорама-автомат содержит опорную раму с направляющими вдоль плоскости режущего инструмента, раму с плоскими пилами с возможностью перемещения в вертикальной плоскости, каретку, опоры для установки распиливаемого материала, прижимные устройства. Каретка с пильной рамой расположены на направляющих станины с возможностью перемещения при распиливании бревна на доски. Опоры расположены в нижней части станины с возможностью отвода и подвода в вертикальном направлении в процессе распиливания. Прижимные устройства выполнены в виде откидных зажимов, расположенных против каждого опорного элемента в верхней части станины, с возможностью разжима и последующего зажима распиливаемого материала соответственно при подходе и проходе каретки с пильной рамой. Пилорама выполнена с возможностью автоматической загрузки заготовок и разгрузки распиленного материала и автоматическим циклом распиловки. Повышается качество пропила, снижается количество отходов, сокращаются площади, занимаемые пилорамой, обеспечивается автоматизация цикла обработки. 1 ил.
Пилорама-автомат, включающая опорную раму (станину) с направляющими вдоль плоскости режущего инструмента, раму с плоскими пилами с возможностью перемещения в вертикальной плоскости, каретку, опоры для установки распиливаемого материала, прижимные устройства, отличающаяся тем, что каретка с пильной рамой расположены на направляющих станины с возможностью перемещения при распиливании бревна на доски, опоры расположены в нижней части станины с возможностью отвода и подвода в вертикальном направлении в процессе распиливания, прижимные устройства выполнены в виде откидных зажимов, расположенных против каждого опорного элемента в верхней части станины, с возможностью разжима и последующего зажима распиливаемого материала соответственно при подходе и проходе каретки с пильной рамой, при этом пилорама выполнена с возможностью автоматической загрузки заготовок и разгрузки распиленного материала и автоматическим циклом распиловки.
| БЫТОВАЯ ПИЛОРАМА | 2008 |
|
RU2395387C2 |
| ПИЛОРАМА | 1994 |
|
RU2038948C1 |
| Привод лесопильной рамы | 1975 |
|
SU718252A1 |
| US 2011283859 A1, 24.11.2011 | |||
| Устройство для измерения усилий | 1974 |
|
SU501305A1 |

