Настоящее изобретение относится к способу и блоку управления для распознания столкновения для транспортного средства.
Из DE 102004022834 A1 известно применение сигналов корпусного шума для распознания столкновения.
Из DE 102004029532 A1 (ближайший аналог изобретения) известна система распознавания удара транспортного средства о препятствие за счет регистрации звука, возникающего при столкновении, и направления соответствующего сигнала в блок обработки. При этом место удара определяется на основании путей распространения сигнала к различным датчикам.
Предлагаемый в изобретении способ распознания столкновения для транспортного средства с использованием сигнала регистрирующей корпусный шум сенсорики отличается тем, что место удара на транспортном средстве определяют в зависимости от результатов анализа многопутевого распространения в транспортном средстве сигнала, отдельные составляющие которого, распространявшиеся по разным путям и при этом приобретшие характеристический вид и сдвинувшиеся относительно друг друга во времени, достигают сенсорики с наложением друг на друга.
Предлагаемый в изобретении блок управления для распознания столкновения для транспортного средства имеет по меньшей мере один интерфейс, через который вводится сигнал регистрирующей корпусный шум сенсорики, и схему обработки, которая в зависимости от указанного сигнала распознает столкновение. Отличие заявленного блока управления заключается в том, что схема обработки имеет модуль анализа многопутевого распространения, который определяет место удара на транспортном средстве в зависимости от многопутевого распространения в транспортном средстве сигнала, отдельные составляющие которого, распространявшиеся по разным путям и при этом приобретшие характеристический вид и сдвинувшиеся относительно друг друга во времени, достигают сенсорики с наложением друг на друга.
Преимущество предлагаемого в изобретении способа и предлагаемого в изобретении блока управления для распознания столкновения для транспортного средства с отличительными признаками, представленными в соответствующих независимых пунктах формулы изобретения, перед известным из уровня техники решением состоит в том, что место удара можно без дополнительного формирования информации о направлении определять с использованием многопутевого распространения сигнала корпусного шума на основании подобного ненаправленного, скалярно измеренного сигнала корпусного шума. Для распространения сигнала корпусного удара, например, в панели основания кузова, являющейся одной из деталей кузова транспортного средства, характерно многопутевое распространение. В этом случае отдельные составляющие сигнала, распространявшиеся по разным путям, достигают регистрирующую корпусный шум сенсорику в наложенном друг на друга виде. На основании такой информации о многопутевом распространении сигнала можно реконструировать или локализовать место удара, поскольку такие составляющие сигнала корпусного шума при их распространении по отдельным путям, например, в панели основания кузова, приобретают характеристический вид и оказываются сдвинуты друг относительно друга во времени, что отражает геометрическое положение места удара и позволяет тем самым путем обратного отсчета времени сделать вывод о месте удара.
Достигаемое в результате преимущество состоит в возможности сэкономить на дополнительных датчиках, которые в противном случае предоставляли бы информацию о направлении. Предлагаемое в изобретении решение прежде всего позволяет отказаться от установки датчиков ударного замедления (ударных датчиков) в передней части транспортного средства или на его боковых сторонах и тем самым простым путем сэкономить на таких датчиках.
Предлагаемый в изобретении способ, соответственно предлагаемый в изобретении блок управления позволяют за кратчайшее время, например, менее чем за две миллисекунды, определять геометрическое положение места удара, т.е. место соударения внешнего тела с конструкцией транспортного средства, и поэтому изобретение обеспечивает своевременное распознавание столкновения.
Однако наряду с вынесенными или внешними датчиками предлагаемый в изобретении способ, соответственно предлагаемый в изобретении блок управления позволяют также отказаться от применения центрально установленных датчиков ускорения.
На основании сигнала регистрирующей корпусный шум сенсорики дополнительно можно, как это следует из независимых пунктов формулы изобретения, также определять степень тяжести столкновения. Тем самым предлагаемый в изобретении способ, соответственно предлагаемый в изобретении блок управления обеспечивают возможность эффективного управления средствами безопасности с целью их активизации по мере необходимости, поскольку позволяют с высокой точностью определять место удара, а тем самым и тип удара, а также степень тяжести столкновения и тем самым обеспечивают возможность согласованной активизации средств безопасности, таких как надувные подушки безопасности или преднатяжители ремней безопасности.
Согласно настоящему изобретению под регистрирующей корпусный шум сенсорикой подразумевается сенсорика, способная регистрировать высокочастотные колебания, например, колебания частотой от двух до ста килогерц, а именно: в конструкции транспортного средства, поскольку такие звуковые колебания в виде корпусного шума могут возникать при столкновении. Корпусный шум может при этом регистрироваться датчиками ускорения, изготовленными микромеханически, или же магнитострикциопными датчиками. Под сенсорикой согласно настоящему изобретению могут подразумеваться несколько датчиков или же только один датчик. Датчик в ответ на сигнал корпусного шума формирует электрический сигнал для его последующей обработки. Такой сигнал характеризует сигнал корпусного шума.
Под столкновением согласно настоящему изобретению подразумевается соударение транспортного средства с другим объектом.
Под сигналом согласно настоящему изобретению подразумевается отдельный сигнал или множество сигналов. Такой сигнал прежде всего представляет несколько распространяющихся по разным путям составляющих сигнала корпусного шума, которые достигают датчик корпусного шума в наложенном одна на другую виде.
Под анализом многопутевого распространения согласно настоящему изобретению подразумевается анализ многопутевого распространения сигнала, т.е. на основании результатов анализа многопутевого распространения делается вывод о месте удара.
Термин "многопутевое распространение" должен трактоваться аналогично, например, многопутевому или многолучевому распространению радиоволн, вместо которых, однако, в данном случае в структурах транспортного средства несколькими путями от места удара до датчика в виде волны распространяется корпусный шум. Сама такая волна при этом может быть продольной, поперечной или торсионной либо может представлять собой сочетание волн таких типов.
Под блоком управления согласно настоящему изобретению подразумевается электрическое устройство, которое обрабатывает сигнал регистрирующей корпусный шум сенсорики и в зависимости от результатов такой обработки распознает столкновение. Блок управления помимо этого предназначен также для активизации средств безопасности, таких как надувные подушки безопасности или преднатяжители ремней безопасности. Равным образом блок управления может активизировать также средства защиты транспортного средства. Для подобной обработки сигнала блок управления имеет схему обработки, такую как микроконтроллер либо иной процессор, специализированная интегральная схема или дискретная схема. Возможно также применение двухъядерных процессоров. При использовании процессора какого-либо типа на нем может выполняться один или несколько процессов по обработке сигнала.
Интерфейс может быть реализован на программном и/или аппаратном уровне. При реализации на аппаратном уровне прежде всего возможно использование интегральной микросхемы, множества интегральных микросхем, измерение дискретными элементами или исключительно дискретное решение. Однако возможна также реализация интерфейса на программном уровне, например, в микроконтроллере блока управления.
Модуль анализа многопутевого распространения также может быть реализован на аппаратном и/или программном уровне. При реализации на аппаратном уровне модуль анализа многопутевого распространения может представлять собой, например, самостоятельную схемную область схемы обработки. Вместе с тем модуль анализа многопутевого распространения может представлять собой и исключительно программный модуль.
Место удара представляет собой место, где в соответствующей детали кузова возник сигнал корпусного шума. Обычно такое место представляет собой место, в котором происходит соударение другого объекта с транспортным средством.
Различные предпочтительные варианты осуществления предлагаемого в изобретении способа, соответственно варианты выполнения предлагаемого в изобретении блока управления, заявленных в независимых пунктах формулы изобретения, представлены в соответствующих зависимых пунктах формулы изобретения.
В одном из таких предпочтительных вариантов при анализе многопутевого распространения для каждого из возможных мест удара, например, распределенных по краям панели основания кузова через определенные дистанционные интервалы, предварительно вычисляют соответствующее время задержки в соответствии с возможными путями распространения сигнала к датчику и сохраняют это время задержки в памяти блока управления. Таким путем для каждого возможного места удара получают определенную, характеристическую контрольную последовательность значений времени задержки, обусловленных разной длиной различных путей, по которым сигнал может распространяться от места удара до места расположения датчика. Путем суммирования измеренных амплитуд сигналов в моменты, соответствующие сохраненным в памяти значениям времени задержки, для каждой такой отдельной последовательности формируют суммарный сигнал. Та последовательность значений времени задержки, для которой получают наибольший суммарный сигнал, представляет собой ту последовательность значений времени задержки, которая соответствует фактическому месту удара. Подобный способ в предпочтительном варианте можно осуществлять непрерывно. Для этого его просто осуществляют в непрерывном режиме аналогично оконному интегралу, однако в данном случае суммируют, например, только по три значения.
При анализе многопутевого распространения сигнала такое многопутевое распространение предпочтительно выявлять путем распознавания образа сигнала сигнала, при этом для каждого из путей распространения сигнала корпусного шума определяют значения времени задержки и в зависимости от них определяют место удара. Между местом-источником сигнала, местом расположения регистрирующей корпусный шум сенсорики и путем распространения первичного и первого и второго отраженных сигналов, а также других отраженных сигналов существует постоянная взаимосвязь. При появлении в первичном сигнале определенного образа он сначала достигает регистрирующую корпусный шум сенсорику с первичной волной. Однако такой же образ сигнала достигает регистрирующую корпусный шум сенсорику и по пути распространения сигнала с его отражением, но несколько позже из-за большей протяженности такого пути распространения сигнала. В еще более поздний момент времени такой образ сигнала достигает датчик при распространении сигнала по третьему пути. Затем к датчику поступают отраженные сигналы более высокого порядка. Регистрирующая корпусный шум сенсорика, таким образом, регистрирует образ сигнала по меньшей мере трижды в разные моменты времени. При определении этих значений времени задержки с помощью корреляционного механизма, позволяющего обнаружить в принятом сигнале повторение образа в первом сигнале, на основании этого можно с помощью простых геометрических соотношений непосредственно определить место удара. Так, например, при распространении сигнала по панели основания кузова транспортного средства можно исходить из того, что первый сигнал достиг датчика по прямому пути, т.е. распространялся прямолинейно. Второй сигнал по причине его однократного отражения прошел больший путь. Исходя из известной скорости с распространения волны, каковая скорость является характеристикой используемого материала, и временной разности t по формуле s=c·t можно вычислить разницу между длиной обоих путей распространения сигнала. Таким образом, можно исходить из того, что, с одной стороны, сигнал корпусного шума при столкновении исходит от границы панели основания кузова, а с другой стороны, отражение сигнала произошло на границе панели основания кузова. Дополнительно применяется также общеизвестный закон отражения, согласно которому при отражении волны на наружной кромке панели основания кузова угол падения должен равняться углу отражения. Все такие условия в их совокупности позволяют однозначно определить место удара.
Временной сдвиг тем самым является характеристическим для места-источника сигнала на краю панели основания кузова. Однако подобный подход может использоваться только в том случае, когда место монтажа расположено не на линиях симметрии панели основания кузова, поскольку в противном случае может возникнуть многозначность в определении места-источника сигнала.
В еще одном предпочтительном варианте при анализе многопутевого распространения сигнал инвертируют во времени и с помощью математической модели для по меньшей мере одной детали кузова на основании инвертированного во времени сигнала определяют место удара. Благодаря такой временной инверсии сигнала путем его обратной проекции с использованием математической модели, например, модели анализа методом конечных элементов, модели, основанной на методе решеточных уравнений Больцмана, или упрощенной математической модели, можно определить место-источник сигнала. Благодаря эффекту временной инверсии в математической модели в месте-источнике сигнала происходит конструктивное наложение введенной в обратном во времени порядке последовательности сигналов. В результате этого наблюдаемая в данном месте амплитуда сигнала гораздо выше, чем во всех других местах. Таким путем, с одной стороны, можно установить место-источник сигнала корпусного шума, а с другой стороны, в результате реконструкции сигнала в этом месте получают квазивиртуальное измеренное значение без необходимости использовать в этом месте сенсорику. Тем самым подобный способ позволяет с использованием одного или нескольких датчиков корпусного шума определять геометрическое положение места удара и дополнительно реконструировать сигнал корпусного шума в близкой к месту удара точке. Обработка информации обоих этих типов обеспечивает возможность согласованной с типом столкновения активизации средств безопасности на транспортном средстве.
Предпочтительно далее активизировать средства безопасности в зависимости от указанного реконструированного сигнала. Для этого можно использовать, например, сравнение с пороговым значением, которое при этом может также изменяться адаптивно, причем адаптация зависит от самого сигнала и/или от иных параметров.
Предпочтительно, кроме того, определять в зависимости от реконструированного сигнала степень тяжести столкновения, влияющую на активизацию средств безопасности. Для этого, например, реконструированный сигнал можно возводить в квадрат с получением величины, являющейся мерой энергии удара. Такую величину в качестве меры энергии удара также сравнивают с пороговым значением, например, с также адаптивно изменяющимся пороговым значением.
В еще одном предпочтительном варианте для отдельных составляющих сигнала, появляющихся в результате его многопутевого распространения, учитывают затухание. Такое затухание можно компенсировать в математической модели путем усиления. Благодаря этому повышается точность предлагаемого в изобретении способа.
В следующем предпочтительном варианте для анализа используют уменьшенный в частотном диапазоне сигнал. Благодаря этому удается сократить затраты машинного времени на вычисления, с получением тем не менее оптимальных результатов.
В еще одном предпочтительном варианте сигнал складывается из синхронизированных во времени отдельных сигналов нескольких датчиков корпусного шума. Благодаря временной синхронизации обеспечивается высокая степень корреляции между такими отдельными сигналами.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые к описанию чертежи, на которых показано:
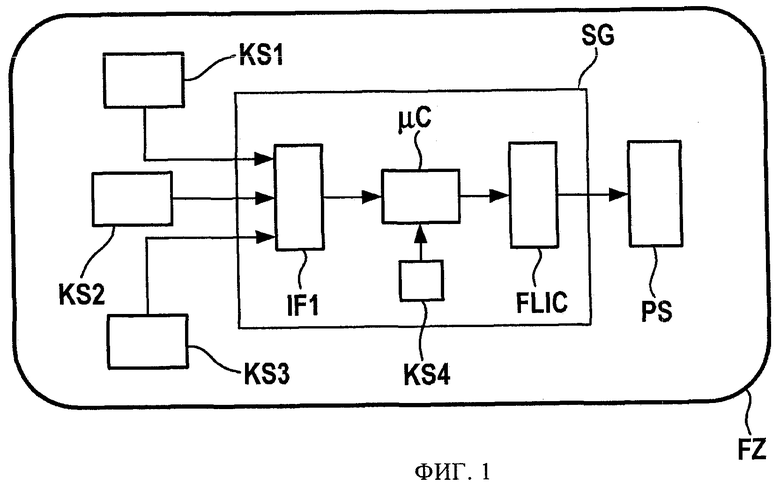
на фиг.1 - схематичный вид транспортного средства с предлагаемым в изобретении блоком управления,
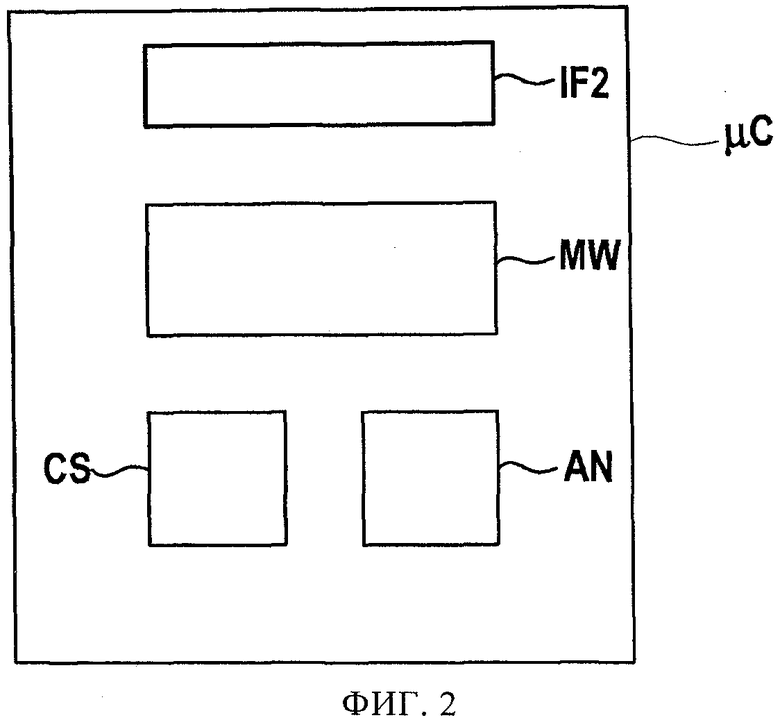
на фиг.2 - схематичный вид структуры программного обеспечения, заложенного в микроконтроллер в схеме обработки,
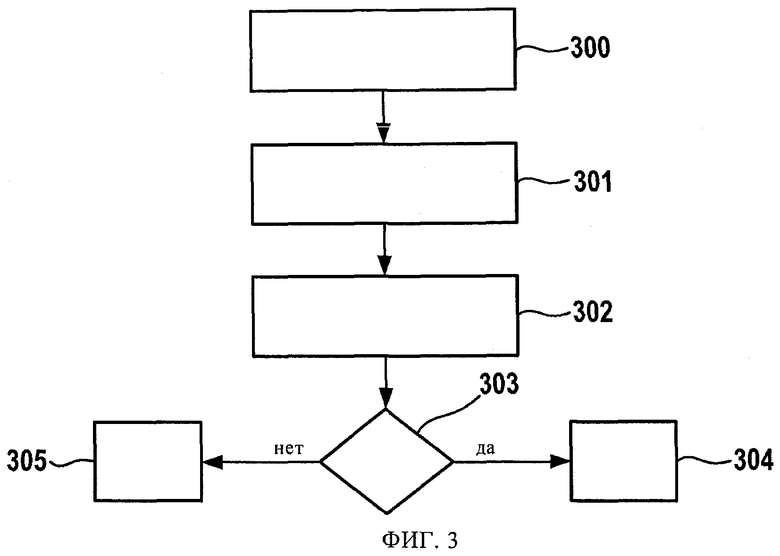
на фиг.3 - первая блок-схема,
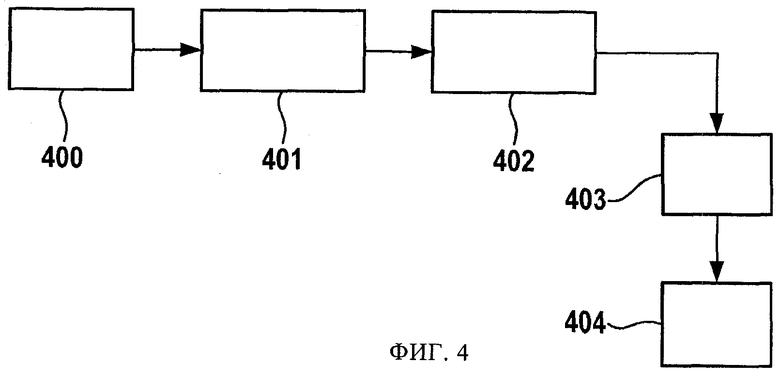
на фиг.4 - вторая блок-схема,
на фиг.5 - различные временные диаграммы,
на фиг.6 - третья блок-схема,
на фиг.7 - схема, иллюстрирующая многопутевое распространение сигнала корпусного шума,
на фиг.8 - четвертая блок-схема,
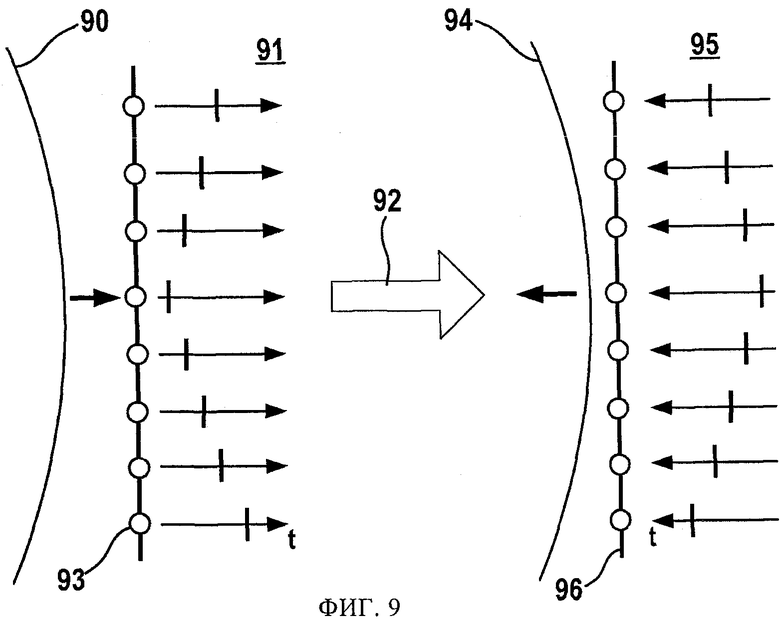
на фиг.9 - схема, иллюстрирующая процесс временной инверсии,
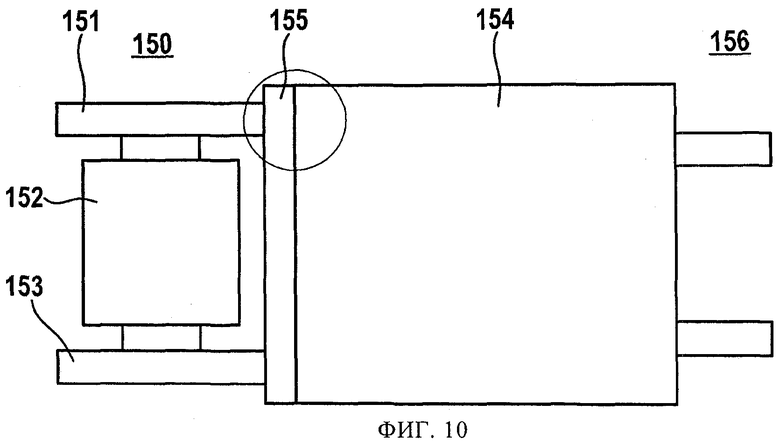
на фиг.10 - схематичный вид механической структуры транспортного средства,
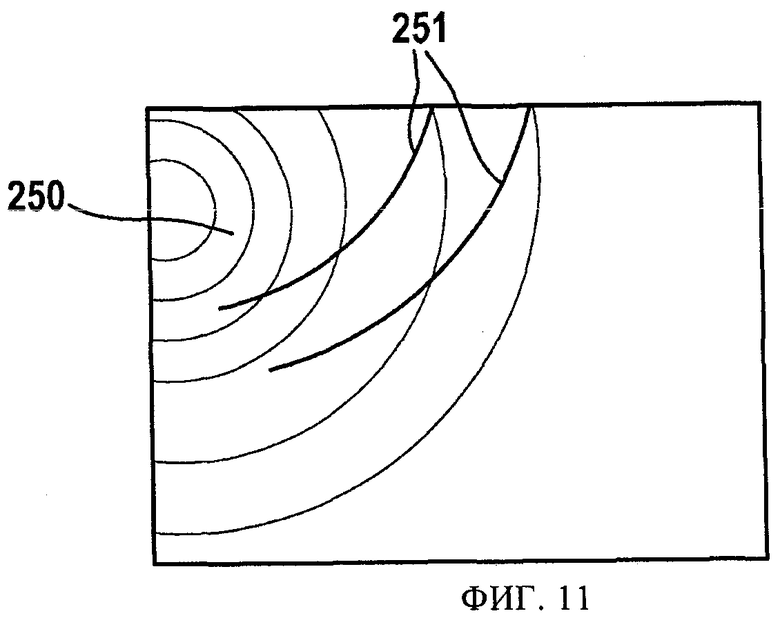
на фиг.11 - схема, иллюстрирующая распространение сигнала корпусного шума,
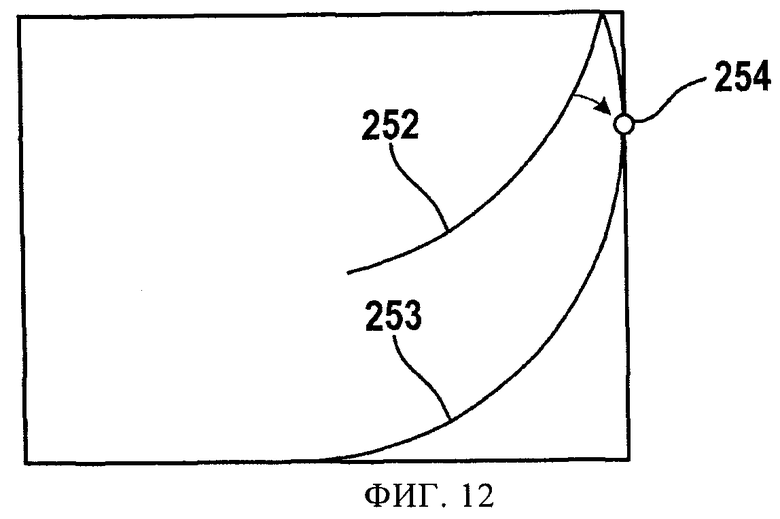
на фиг.12 - другая схема, иллюстрирующая распространение сигнала корпусного шума,
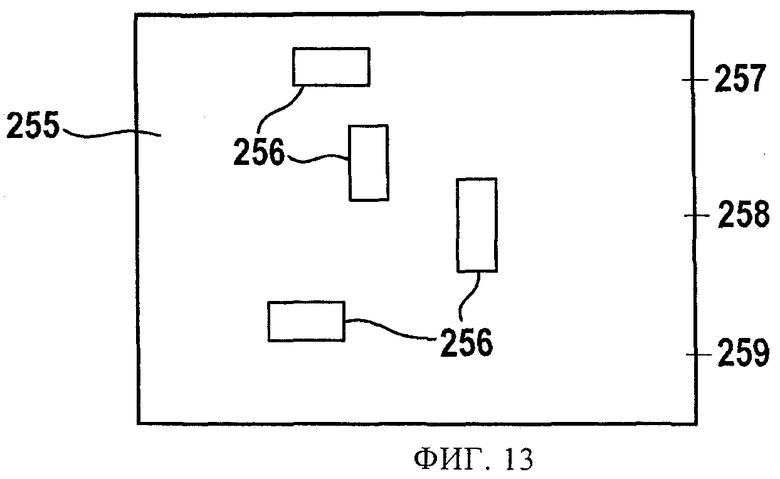
на фиг.13 - оптимизированная для многопутевого распространения корпусного шума панель основания кузова,
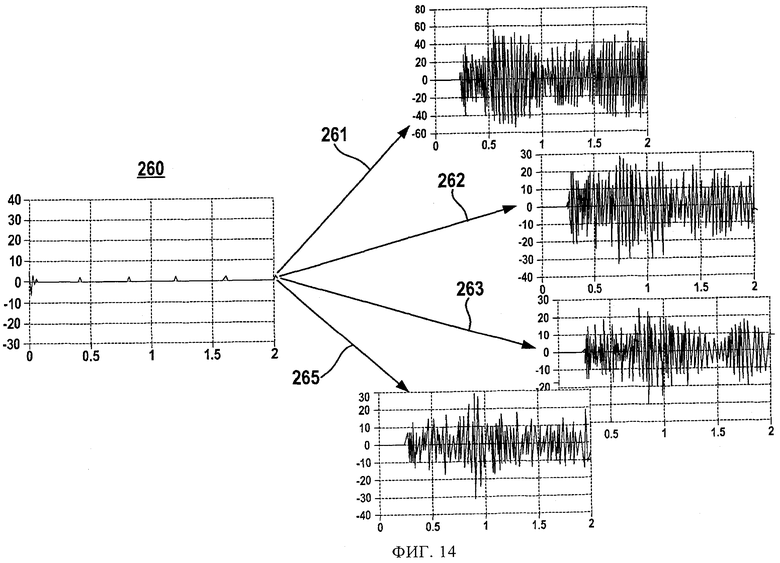
на фиг.14 - схема, иллюстрирующая ударный импульс и сформировавшиеся вследствие его многопутевого распространения сигналы корпусного шума, воспринимаемые различными датчиками,
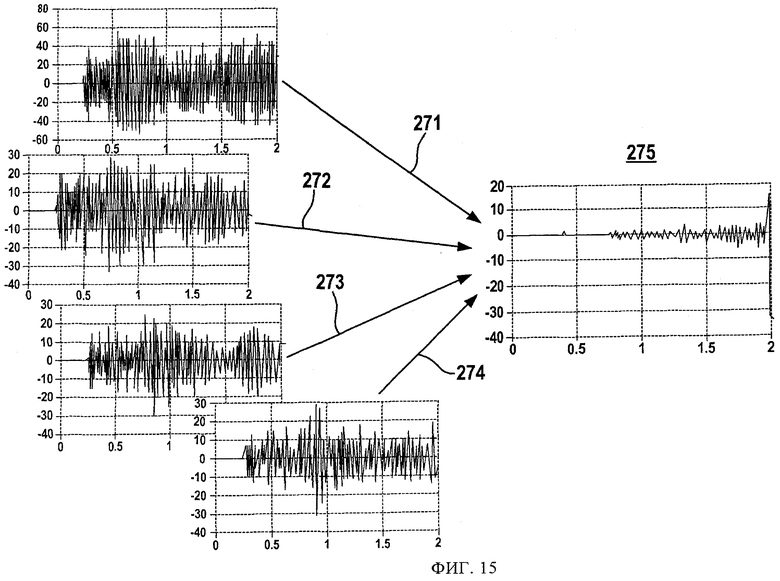
на фиг.15 - инвертированные во времени сигналы датчиков и результирующий импульс и
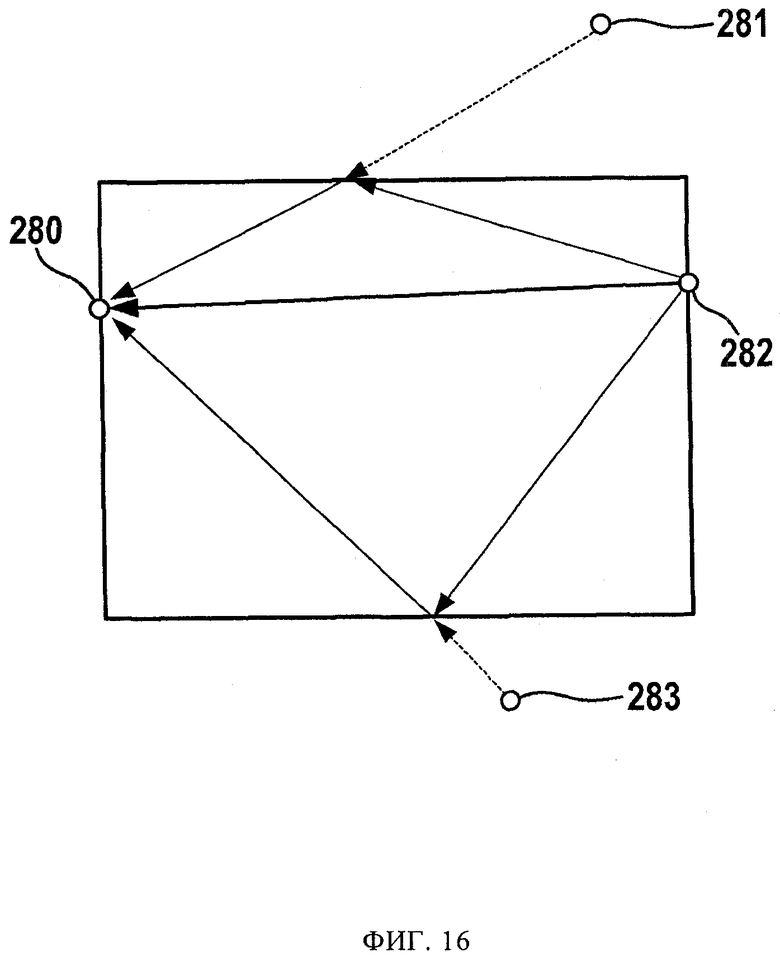
на фиг.16 - другая схема, иллюстрирующая многопутевое распространение сигнала корпусного шума.
На фиг.1 в виде функциональной схемы показан установленный на транспортном средстве FZ предлагаемый в изобретении блок SG управления с подсоединенными к нему компонентами средств PS безопасности, а также внешними датчиками KS1-KS3 корпусного шума. Внешние датчики KS1-KS3 корпусного шума, которые в данном случае представляют собой микромеханические датчики ускорения, соответствующими проводами подсоединены к интерфейсу IF1 блока SG управления. Интерфейс IF1 в данном случае выполнен в виде интегральной микросхемы. Такой интерфейс является прежде всего частью более крупной интегральной микросхемы, выполняющей другие функции для блока SG управления. От интерфейса IF1 сигналы корпусного шума передаются в микроконтроллер µC в схеме обработки. Микроконтроллер µC предлагаемым в изобретении способом определяет место удара, а в предпочтительном варианте определяет также степень тяжести столкновения. Для этого с микроконтроллером дополнительно соединен еще один датчик KS4 корпусного шума, находящийся внутри блока SG управления.
Микроконтроллер µC использует многопутевое распространение сигнала корпусного шума для определения места удара на основании результатов анализа такого многопутевого распространения сигнала корпусного шума. Сигналы, которые по разным путям распространялись к датчикам KS1-KS4 корпусного шума, несут в связи с особенностями путей своего распространения характеристическую информацию, позволяющую путем обратного проецирования локализовать первоначальное место удара.
В принципе возможно использование только одного датчика корпусного шума либо нескольких датчиков корпусного шума в большем или меньшем по сравнению с указанным выше количестве. Другие компоненты, которые необходимы для активизации средств безопасности и для работы блока управления, для упрощения на чертеже не показаны.
Микроконтроллер µC передает соответствующий управляющий сигнал в схему FLIC управления, имеющую силовые выключатели (мощные транзисторные ключи) с электронным управлением для активизации средств PS безопасности, таких как надувные подушки безопасности, преднатяжители ремней безопасности и средства активной безопасности. Другие датчики для упрощения также не показаны на чертеже.
На фиг.2 показана структура программного обеспечения, заложенного в микроконтроллер µC, при этом в данном случае изображены только те элементы программного обеспечения, которые необходимы для пояснения сущности изобретения. Микроконтроллер µC имеет интерфейс IF2, который предназначен, например, для ввода сигналов датчика KS4 корпусного шума. Интерфейс IF2 передает сигналы далее в модуль MW многопутевого распространения для локализации места удара с использованием многопутевого распространения и дополнительно для определения степени тяжести столкновения на основании сигналов корпусного шума. Интерфейс IF2 передает также далее, например, сигналы датчиков KS1-KS3 корпусного шума в модуль MW анализа многопутевого распространения. Степень тяжести столкновения, однако, определяется в модуле CS, например, путем суммирования возведенных в квадрат амплитуд реконструированных сигналов корпусного шума для получения величины, являющейся мерой энергии удара при столкновении. В модуле AN управления путем сравнения степени тяжести столкновения с пороговым значением определяется, следует ли активизировать средства безопасности, а также в какой момент и какие из них следует активизировать. Необходимые для такого сравнения пороговые значения могут формироваться адаптивно.
На фиг.3 показана первая блок-схема, на которой представлены шаги, выполняемые при осуществлении предлагаемого в изобретении способа. На шаге 300 сигналы корпусного шума передаются, например, через интерфейсы IF1 и IF2. На шаге 301 модулем MW анализа многопутевого распространения анализируется многопутевое распространение сигналов корпусного шума для определения таким путем места удара. Далее на шаге 302 также на основании сигнала корпусного шума определяется степень тяжести столкновения. Однако для определения степени тяжести столкновения дополнительно к указанным или вместо них может также использоваться сигнал другого датчика. Затем на шаге 303 принимается решение о том, необходимо ли с учетом выявленного места удара и степени тяжести столкновения активизировать средства безопасности, и, если да, то какие из них. Подобная активизация средств безопасности выполняется на шаге 304, тогда как при отсутствии необходимости в их активизации выполнение предлагаемого в изобретении способа завершается на шаге 305.
На фиг.4 показана другая блок-схема, на которой представлены шаги, выполняемые при осуществлении предлагаемого в изобретении способа. На шаге 400 поступают сигналы корпусного шума. Далее на шаге 401 из памяти блока управления загружаются постоянно хранящиеся в ней данные о времени задержки, характеристические для разных путей распространения сигналов корпусного шума. После этого с использованием таких данных о времени задержки на шаге 402 выполняется суммирование. Далее на шаге 403 отыскивается максимальная сумма, после чего на шаге 404 с этой максимальной суммой соотносится место удара. Подобный способ сравнительно прост в осуществлении и может использоваться вместо рассмотренных ниже способов.
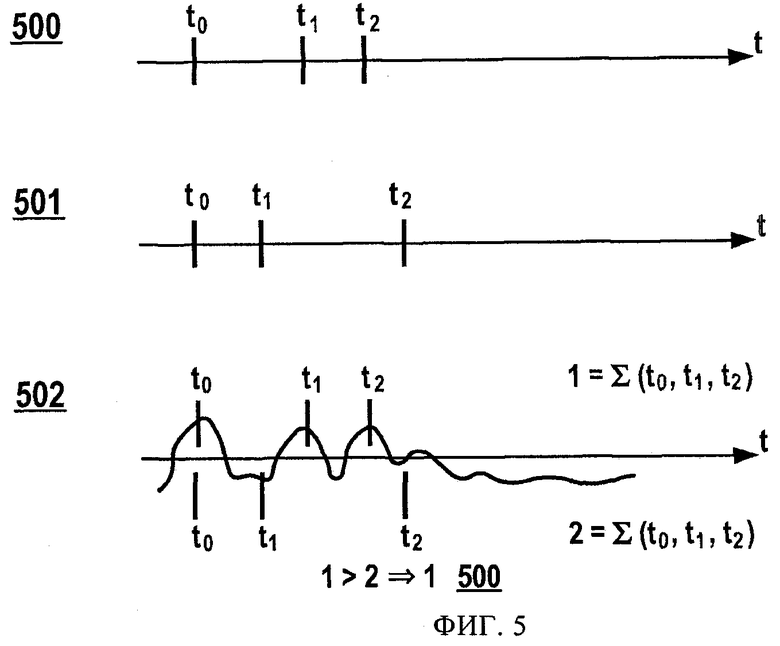
На фиг.5 показаны три временные диаграммы 500-502 для дальнейшего пояснения вышеописанного способа. Временная диаграмма 500 с показанными на ней значениями времени задержки t0, t1 и t2 относится к первому месту-источнику корпусного шума, тогда как ко второму месту-источнику корпусного шума, регистрируемого соответствующей сенсорикой, относится временная диаграмма 501, на которой также показаны значения времени задержки t0, t1 и t2, которые, однако, не совпадают со значениями времени задержки, представленными для первого места-источника корпусного шума. Временная же диаграмма 502 иллюстрирует предлагаемый в изобретении способ. Амплитуды измеренного сигнала 503 суммируются в каждый из загруженных из памяти моментов времени t0-t2. При этом легко можно видеть, что сумма 1 больше суммы 2. Сказанное представлено в виде неравенства 1>2. Поэтому в качестве места-источника корпусного шума остается только место-источник корпусного шума, к которому относится временная диаграмма 500.
На фиг.6 показана еще одна блок-схема, на которой представлены шаги, выполняемые при осуществлении предлагаемого в изобретении способа. На шаге 600 в имеющемся сигнале распознается некий образ сигнала. Такой образ сигнала отыскивается на шаге 601 и в последующих принимаемых сигналах. При его выявлении затем на шаге 602 определяются значения времени задержки. После этого на шаге 603 может выполняться соотнесение путей распространения сигнала с этими значениями времени задержки. Далее на шаге 604 на основании путей распространения сигнала можно в зависимости от значений времени задержки с использованием, например, простых геометрических соотношений определить место удара.
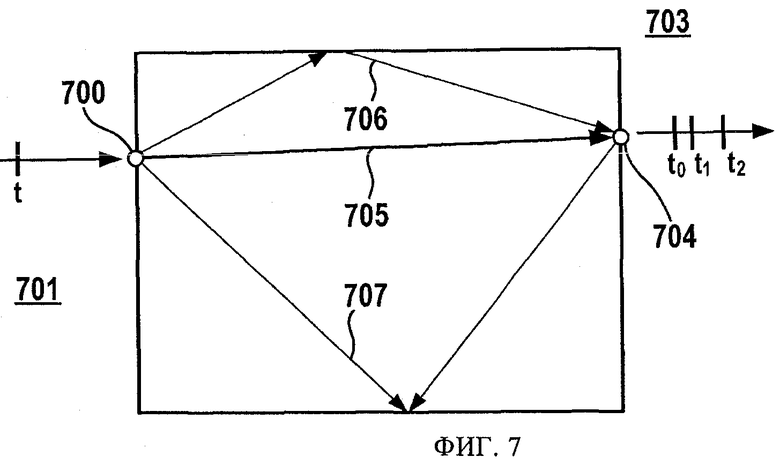
На фиг.7 проиллюстрированы принципы, лежащие в основе вышеописанного способа. Сигнал корпусного шума возникает в точке 700, т.е. в ней находится место удара. Появляющийся в этом месте сигнал имеет определенный образ 701. На приведенной на чертеже схеме показаны три пути распространения сигнала к приемнику 704, а именно: прямой путь 705 распространения сигнала, путь 706 распространения сигнала в результате его отражения и путь 707 распространения сигнала также в результате его отражения. В соответствии с этим все сигналы достигают приемника 704 в разные моменты времени. На основании определенных согласно изобретению значений времени задержки можно определить эти пути распространения сигналов, а тем самым и место удара. На основании временной диаграммы распознается, что образ сигнал, который можно выявлять, например, методами корреляционного анализа, повторился трижды.
На фиг.8 показана еще одна блок-схема, на которой представлены шаги, выполняемые при осуществлении предлагаемого в изобретении способа. На шаге 800 регистрирующая корпусный шум сенсорика KS1-KS4 принимает сигналы корпусного шума, которые распространялись также вследствие многопутевого распространения. Для ускорения и упрощения последующих вычислений возможна также фильтрация такого принятого сигнала. Далее на шаге 801 выполняется временная инверсия. Подобная временная инверсия означает, что поступающие первыми сигналы поступают в математическую модель последними. В рассматриваемом примере на шаге 802 используется панель основания кузова, на которой расположены датчики корпусного шума. Для этой панели основания кузова используется математическая модель, например, модель анализа методом конечных элементов. Обычно подобная модель уже имеется у производителя транспортного средства перед началом фактического производства и геометрически отображает структуру деталей с помощью дискретных оболочковых или объемных элементов. Дополнительно такая модель содержит также данные об используемых материалах, позволяющие рассчитывать на их основании показатели жесткости и эффект распространения волн. Точность вычислений зависит помимо прочего от размера и количества используемых элементов. В том случае, когда, например, достаточно меньшей точности в распознании места удара, элементы можно выбирать больших размеров и в меньшем количестве, что упрощает вычисления. С применением такой математической модели инвертированные во времени сигналы используются для определения места удара. Для этого на шаге 803 выбирается максимальное значение реконструированных сигналов, которое указывает на место удара. В качестве альтернативного метода можно также использовать метод решеточных уравнений Больцмана. Подобный метод решеточных уравнений Больцмана основан на клеточном автомате. При этом, например, панель основания кузова разбивается на постоянную сетку из ячеек или клеток, каждой отдельной из которых ставится в соответствие ин4юрмация о скорости распространения волн и отражательных свойствах. При вычислениях необходимо только, чтобы каждая клетка обменивалась информацией с каждой из непосредственно соседних с ней клеток. Преимущество метода решеточных уравнений Больцмана перед методом конечных элементов состоит в численной простоте. Описание этого метода можно найти, например, у Dieter A. Wolf-Gladrow в Lattice-Gas Cellular Automata and Lattice Boltzmann Models - An Introduction, изд-во Springer, 308 страниц, 2000. Подобный метод можно также непосредственно преобразовать в электронную схему. Так, например, на электронном элементе можно расположить сетку из запоминающих элементов и вычислительных элементов, которая непосредственно воспроизводит деталь транспортного средства. Отдельные клетки сетки на электронном элементе в этом случае в соответствии с правилами метода решеточных уравнений Больцмана соединены с непосредственно соседними с ними клетками. В определенной клетке сетки, соответствующей месту расположения датчика на панели основания кузова, в электронный элемент вводится инвертированный во времени сигнал. По краям такой сетки находятся выходы, с которых можно снимать краевые сигналы, на основании которых соответственно определяют максимум. Согласование подобного электронного элемента с определенным транспортным средством может быть основано, например, на том, что в каждой ячейке сетки предусмотрены определенные допускающие запись в них информации запоминающие элементы, которые содержат информацию о локальной скорости распространения волн или о том, идет ли речь о ячейке сетки, расположенной на крае панели основания кузова, о входной или выходной ячейке либо о ячейке, которая исключается из вычислений. Панель основания кузова определенных размеров можно затем простым путем смоделировать на электронном элементе, установив соответствующее содержимое запоминающих элементов на сетке. Преимущество реализованного подобным образом электронного элемента состоит в высокой скорости вычислений и простоте работы с ним.
На шаге 804 полученный максимум возводится в квадрат для получения величины, являющейся мерой степени тяжести столкновения. Затем на шаге 805 проверяется, высока ли степень тяжести столкновения и насколько она высока, с целью принять решение о том, необходима ли активизация средств безопасности или нет. При необходимости их активизации она выполняется в соответствии с предписаниями на шаге 806. При отсутствии же необходимости в активизации средств безопасности затем на шаге 807 распознается также, например, ложное срабатывание.
На фиг.9 схематично проиллюстрирован принцип, лежащий в основе способа временной инверсии. Фронт 90 волны достигает слева датчики 93. Каждый из этих датчиков 93 регистрирует его достижение фронтом волны в функции времени. Поскольку фронт 90 волны имеет изогнутую форму, речь идет о волне, исходящей от точечного источника. Поэтому волна достигает разные места, в которых расположены датчики 93, через разные промежутки времени. Сказанное видно по положению сигналов на осях времени, изображенных рядом с каждым из датчиков. На чертеже это обозначено позицией 91.
На следующем шаге измеренные значения 91 инвертируются на оси времени, т.е. импульсу, которому на оси времени до инверсии соответствовал более ранний момент времени, после инверсии соответствует более поздний момент времени и наоборот. Такие сигналы подаются на излучатели 96, каждый из которых находится при этом в том же месте, что и соответствующий датчик. В этом месте сигналы излучаются в последовательности, обратной первоначальной последовательности достижения ими датчиков. Подобное излучение сигналов представлено на чертеже в виде исходящей волны 94.
В результате формируется волна, являющаяся отражением пришедшей волны во времени, т.е. вновь сформированная волна идентична принятой волне, но лишь распространяется в обратном направлении, т.е. первоначально расходящаяся волна преобразуется в сходящуюся волну, которая фокусируется обратно в направлении первоначальной исходной точки.
При любом столкновении транспортного средства в результате локальных ускорений формируются звуковые волны, которые распространяются начиная от точки удара через всю единую конструкцию транспортного средства. Такие волны распространяются с локальной скоростью звука, которая, например, для стали составляет примерно 5000 м/с.
На фиг.10 показана точка входа звуковой волны в панель 154 основания кузова. Местоположение такой точки входа звуковой волны в панель основания кузова, таким образом, непосредственно зависит от места удара, которое в рассматриваемом примере находится на переднем правом лонжероне 151, и позволяет тем самым распознавать геометрическое положение места удара. При фронтальном смещенном влево столкновении сигнал, например, входил бы в панель основания кузова в ее левой передней части. Соответствующим образом сигнал корпусного шума входил бы в панель основания кузова при наезде на транспортное средство сбоку и сзади. Для упрощения в последующем описании рассматривается только панель основания кузова, поскольку точка входа в нее сигнала достаточно точно характеризует геометрическое положение места удара. Вместо панели основания кузова можно также использовать иные детали кузова. От точки своего входа в панель основания кузова сигнал корпусного шума распространяется кругообразно до достижения ограничивающей поверхности. По достижении этой ограничивающей поверхности волна отражается и распространяется в обратном направлении к внутренней части панели. В ходе дальнейшего распространения волн происходит взаимное наложение исходных волн и отраженной волны, в результате чего возникает интерференция. По мере дальнейшего распространения волны происходит ее отражение на всех краях панели, в результате чего вновь возникают распространяющиеся в обратном направлении волны с образованием в целом сложной интерференционной картины. Находящаяся на лонжероне точка удара обозначена на фиг.10 позицией 155. От этой точки удара сигнал корпусного шума будет распространяться по лонжерону и перегородке в панель 154 основания кузова. Сигнал корпусного шума переходит в панель основания кузова в обозначенной окружностью части. Задняя часть транспортного средства обозначена позицией 156, а его передняя часть - позицией 150. Двигатель обозначен позицией 152, а левый лонжерон - позицией 153. Передняя часть транспортного средства при этом обозначена позицией 150.
На фиг.11 схематично показана панель основания кузова. Дугообразными линиями обозначены распространяющиеся звуковые волны корпусного шума. Они обозначены позицией 250. Линиями 251 обозначены вторичные волны, возникающие на краю панели основания кузова в результате отражения первоначальной волны. Для наглядности на чертеже показана только некоторая часть волнового пакета.
При закреплении датчиков корпусного шума на панели основания кузова они будут регистрировать во времени не только первичную волну, но и все отраженные волны, а также их в виде наложения в местах измерения.
В показанной на фиг.12 точке 254 измерения, таким образом, сначала регистрируется волновой пакет 253, на который по истечении короткого периода времени накладывается приходящий несколько позже волновой пакет 252, который образуется в результате первого отражения. Каждый из последующих волновых пакетов для упрощения па чертеже не показан. На чертеже не показаны также необязательные другие датчики.
В целом датчики корпусного шума, таким образом, регистрируют сложную временную последовательность сигналов, образующуюся в результате наложения первичных и отраженных волн.
Принятый датчиком сигнал сначала не содержит никакой информации о направлении, с которого поступает сигнал. Фактически сигнал поступает, о чем говорилось непосредственно выше, с разных направлений.
Однако несмотря на это, используя принцип временной инверсии, согласно рассматриваемому варианту можно определить место, из которого исходит сигнал корпусного шума. Для этого зарегистрированные датчиками сигналы на первом шаге подвергаются временной инверсии. На следующем шаге эти сигналы вводятся в математическую модель панели основания кузова, а именно таким образом, что в модели соответствующие волны вводятся точно в местах, соответствующих местам расположения датчиков. После этого с помощью математической модели рассчитывается распространение волн и выдается сообщение о том, где на краю панели основания кузова сигнал имеет максимальную интенсивность. Место, где сигнал имеет максимальную интенсивность, соответствует месту, из которого звуковые волны корпусного шума вошли в панель основания кузова.
На фиг.13 показана еще одна панель основания кузова с указанием места 255 удара и изображением датчиков 257, 258 и 259. На панели основания кузова расположены препятствия 256, которые имеются у реальной панели основания кузова и образованы, например, отверстиями, точками резьбового крепления сидений и средств пассивной безопасности или в результате формообразования (желобчатой гибки). Наличие таких препятствий 256 лишь повышает эффективность предлагаемого в изобретении способа. По аналогии с оптикой следует отметить, что подобные препятствия, которые представляют центры рассеяния волн, увеличивают угловую апертуру системы и тем самым повышают разрешающую способность. При соответствующей конструкции, таким образом, для осуществления предлагаемого в изобретении способа вполне можно также использовать единственный датчик корпусного шума.
На фиг.14 схематично проиллюстрировано, что становится с одним импульсом, вводимым в панель основания кузова и обозначенным позицией 260, вследствие его многопутевого распространения к отдельным датчикам. Полученные разными датчиками данные 269 существенно отличаются от импульса 260, при этом на чертеже показаны четыре набора полученных разными датчиками данных 261, 262, 263 и 264. Обусловлено это взаимным наложением сигналов из-за их многопутевого распространения.
На фиг.15 проиллюстрирован следующий шаг. На основании сигналов датчиков формируются инвертированные во времени сигналы 270, после чего сигналы 271-274 вводятся в математическую модель с получением результирующего импульса 275. На фиг.14 и 15 каждый из сигналов представлен в виде его амплитудно-временной характеристики. На примере таких характеристик представлена реконструкция импульса на основании сигналов корпусного шума.
При использовании нескольких датчиков корпусного шума из-за их множества нежелательно возрастают затраты. Если примириться с несколько меньшей точностью в определении места удара, достаточно также использовать единственный датчик корпусного шума для определения геометрического положения места удара. При этом, однако, обязательно необходимым условием является по меньшей мере однократное, а предпочтительно многократное, рассеяние или отражение сигнала и достижение соответствующими рассеянными или отраженными сигналами регистрирующей корпусный шум сенсорики. При этом используется тот факт, что отраженные сигналы, с одной стороны, прошли другой путь, а с другой стороны, содержат информацию из первоначально иного направления. Исходя из показанного на фиг.16 источника 280 сигнала, т.е. того места панели основания кузова, из которого вышел сигнал корпусного шума, отраженные сигналы, излученные после временной инверсии, выглядят таким образом, будто бы они испускаются дополнительным излучателем 281, соответственно 283. Сказанное можно наглядно проиллюстрировать на примере принятого в геометрической оптике изображения хода лучей. Под лучами при этом подразумеваются линии, которые проходят перпендикулярно волновым пакетам в направлении распространения. При использовании геометрической оптики справедлив закон отражения, согласно которому угол падения равен углу отражения. На фиг.16 показаны излучатель 282 и виртуальные излучатели 281 и 283, а также источник 280 сигнала.
Сигнал, который после его отражения распространяется к его источнику различными путями, позволяет, таким образом, отчасти компенсировать отсутствие датчиков, а также обеспечить еще приемлемую реконструкцию первоначального сигнала. При определенных условиях может оказаться целесообразным повышать качество реконструкции первоначального сигнала, предусматривая дополнительные центры рассеяния и отражения. Такими центрами рассеяния и отражения могут служить, например, выгнутые желобки или отверстия в панели основания кузова.
Резюмируя сказанное выше, можно утверждать, что в отличие от возможно интуитивного восприятия эффективность предлагаемого в изобретении способа тем выше, чем больше препятствий находится на пути распространения сигнала, поскольку они характеризуют этот путь его распространения.
Повысить качество реконструкции можно, использовав при реконструкции возможное затухание волнового сигнала. Распространение сигналов по разным путям с разными углами зрения приводит в результате затухания сигналов к изменению их амплитуды. При проведении вычислений по временной инверсии этот эффект может скомпенсировать, использовав приемлемый вычислительный метод. При распространении волны в вычислениях можно, например, вместо затухания использовать усиление. При этом, например, на каждом временном шаге интенсивность или уровень сигнала повышают на определенную величину, которая при этом может зависеть от локальных свойств материала и которую рассчитывают соответствующим образом. Тем самым сигнал, который прошел больший путь (и затратил на его прохождение соответственно больше времени) и затухание которого в ходе прямого отсчета времени достигло соответствующей степени, при проведении вычислений по временной инверсии вновь усиливают пропорционально затраченному на распространение времени (и тем самым пропорционально протяженности пути распространения).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДУШКА БЕЗОПАСНОСТИ, УСТАНОВЛЕННАЯ НА ПЕРЕДНЕМ ЛОНЖЕРОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2654232C2 |
| ФОРМИРОВАНИЕ МОДЕЛИРОВАННЫХ ДАННЫХ ДАТЧИКОВ ДЛЯ ОБУЧЕНИЯ И ПРОВЕРКИ ДОСТОВЕРНОСТИ МОДЕЛЕЙ ОБНАРУЖЕНИЯ | 2017 |
|
RU2694154C2 |
| ГИБКИЙ ЭЛЕКТРИЧЕСКИЙ РЕЗИСТИВНЫЙ ДАТЧИК ОБНАРУЖЕНИЯ СТОЛКНОВЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2647095C2 |
| ШУМОВИБРОДЕМПФИРУЮЩИЙ УЗЕЛ ПАНЕЛИ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2149788C1 |
| ОБОЛОЧЕЧНЫЙ ОБЪЕМНЫЙ ПОГЛОТИТЕЛЬ ЗВУКОВОЙ ЭНЕРГИИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2442705C1 |
| АВТОТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2487020C1 |
| МОНТАЖНАЯ КОНСТРУКЦИЯ C РАДИОЛОКАЦИОННЫМ УСТРОЙСТВОМ | 2017 |
|
RU2660659C1 |
| КОНСТРУКЦИЯ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2662618C2 |
| СИСТЕМА ДЛЯ МИНИМИЗАЦИИ ТРАВМ ОБЪЕКТА ПРИ СТОЛКНОВЕНИИ С ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2658531C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ АВАРИЙ И ТРАНСПОРТНОЕ СРЕДСТВО, СОДЕРЖАЩЕЕ СИСТЕМУ ПРЕДОТВРАЩЕНИЯ АВАРИЙ | 2012 |
|
RU2608938C2 |
Группа изобретений относится к технике защиты экипажа и пассажиров транспортных средств при дорожно-транспортных происшествиях. Предложены блок управления и способ распознания столкновения для транспортного средства. Факт столкновения определяют в зависимости от сигнала регистрирующей корпусный шум сенсорики. Место же удара на транспортном средстве определяют в зависимости от результатов анализа многопутевого распространения в транспортном средстве сигнала, отдельные составляющие которого, распространявшиеся по разным путям и при этом приобретшие характеристический вид и сдвинувшиеся относительно друг друга во времени, достигают сенсорики с наложением друг на друга. Группа изобретений обеспечивает возможность эффективного управления средствами безопасности с целью их активизации по мере необходимости, поскольку позволяет с высокой точностью определять место удара, а тем самым и тип удара, а также степень тяжести столкновения. При этом осуществляется согласованная активизация средств безопасности, таких как надувные подушки безопасности или преднатяжители ремней безопасности. 2 н. и 11 з.п. ф-лы, 16 ил.
1. Способ распознания столкновения для транспортного средства (FZ) с использованием сигнала регистрирующей корпусный шум сенсорики (KS1-KS4), отличающийся тем, что место удара на транспортном средстве (FZ) определяют в зависимости от результатов анализа многопутевого распространения в транспортном средстве сигнала, отдельные составляющие которого, распространявшиеся по разным путям, и при этом приобретшие характеристический вид, и сдвинувшиеся относительно друг друга во времени, достигают сенсорики (KS1-KS4) с наложением друг на друга.
2. Способ по п.1, отличающийся тем, что при анализе многопутевого распространения формируют опорные сигналы для различных возможных мест удара, для чего суммируют амплитуды сигнала в моменты, соответствующие сохраненным в памяти значениям времени задержки, при этом наибольший опорный сигнал соответствует фактическому месту удара.
3. Способ по п.2, отличающийся тем, что опорные сигналы формируют непрерывно.
4. Способ по п.1, отличающийся тем, что при анализе многопутевого распространения его выявляют путем распознавания образа сигнала, для каждого из путей распространения сигнала корпусного шума определяют значения времени задержки и в зависимости от них определяют место удара.
5. Способ по п.4, отличающийся тем, что для распознавания образа сигнала используют корреляцию.
6. Способ по п.1, отличающийся тем, что при анализе мпогопутевого распространения сигнал инвертируют во времени и с помощью математической модели для по меньшей мере одной детали кузова на основании инвертированного во времени сигнала определяют место удара.
7. Способ по п.6, отличающийся тем, что при определении места удара с помощью математической модели математическая модель для места удара определяет на основании инвертированных во времени сигналов максимальный реконструированный сигнал в сравнении с другими местами.
8. Способ по п.7, отличающийся тем, что в зависимости от реконструированного сигнала активизируют средства (PS) безопасности.
9. Способ по п.8, отличающийся тем, что в зависимости от реконструированного сигнала определяют степень тяжести столкновения, влияющую на активизацию средств безопасности.
10. Способ по одному из пп.6-9, отличающийся тем, что для отдельных составляющих сигнала учитывают затухание.
11. Способ по одному из пп.6-9, отличающийся тем, что сигнал для анализа уменьшают в частотном диапазоне.
12. Способ по одному из пп.6-9, отличающийся тем, что сигнал складывается из синхронизированных во времени отдельных сигналов нескольких датчиков корпусного шума.
13. Блок (SG) управления для распознания столкновения для транспортного средства (FZ), имеющий по меньшей мере один интерфейс (IF1, IF2), через который вводится сигнал регистрирующей корпусный шум сенсорики (KS1-KS4), и схему (µC) обработки, которая в зависимости от указанного сигнала распознает столкновение, отличающийся тем, что схема (µC) обработки имеет модуль (MW) анализа многопутевого распространения, который определяет место удара на транспортном средстве в зависимости от многопутевого распространения в транспортном средстве сигнала, отдельные составляющие которого, распространявшиеся по разным путям и при этом приобретшие характеристический вид и сдвинувшиеся относительно друг друга во времени, достигают сенсорики (KS1-KS4) с наложением друг на друга.
| DE 102004029532 A1, 05.01.2006 | |||
| DE 102004031557 A1, 09.02.2006 | |||
| DE 19855452 A1, 15.06.2000 | |||
| DE 102005020146 A1, 01.06.2006 | |||
| WO 2005036108 A1, 21.04.2005 | |||
| ДАТЧИК СТОЛКНОВЕНИЯ СИСТЕМЫ ПАССИВНОЙ БЕЗОПАСНОСТИ ВОДИТЕЛЯ ЛЕГКОВОГО АВТОМОБИЛЯ | 1993 |
|
RU2041086C1 |

