Изобретение относится к неразрушающему контролю и может быть использовано для дефектоскопии объектов из ферромагнитных металлов.
Известен способ выявления подповерхностных дефектов в ферромагнитных объектах, заключающийся в том, что намагничивают контролируемый объект с помощью системы намагничивания, сканируют поверхность контролируемого объекта, регистрируют магниточувствительными элементами, по меньшей мере, одну составляющую индукции магнитных потоков рассеяния над контролируемым участком и по ее изменению судят о наличии подповерхностных дефектов [1].
Недостаток известного способа заключается в невозможности выявления дефектов, залегающим на глубине более 15 мм. Это связано с тем, что изменения магнитных потоков рассеяния, созданные такими дефектами, сопоставимы с изменениями шумовой составляющей, обусловленными вариацией влияющих факторов.
Известен способ выявления подповерхностных дефектов в ферромагнитных объектах, заключающийся в том, что контролируемый объект намагничивают системой намагничивания, возбуждают с помощью вихретокового преобразователя вихревые токи, проникающие на толщину контролируемого участка, сканируют поверхность контролируемого объекта, регистрируют в процессе сканирования изменение вносимых в вихретоковый преобразователь параметров, и по величине этих изменений судят о наличии и параметрах подповерхностных дефектов [2].
Недостаток известного способа заключается в необходимости использования низких частот возбуждаемых вихревых токов, для обеспечения их проникновения на толщину контролируемого объекта. При этом снижается пропорциональная рабочей частоте абсолютная чувствительность к дефектам. Для обеспечения требуемой абсолютной чувствительности необходимо существенное увеличения размеров и числа витков катушек индуктивности вихретоковых преобразователей, что приводит к соответствующему уменьшению локальности контроля.
Наиболее близок к предложенному, принятый за прототип, вихретоково-магнитный способ выявления подповерхностных дефектов в ферромагнитных объектах, заключающийся в том, что контролируемый объект намагничивают системой намагничивания, возбуждают с помощью вихретокового преобразователя вихревые токи, сканируют поверхность контролируемого объекта, регистрируют в процессе сканирования изменения 

Недостаток известного способа заключается в том, что он не обладает потенциально достижимой при вихретоково-магнитном способе дефектоскопии чувствительностью и информативностью.
Цель изобретения - повышение чувствительности и информативности контроля.
Поставленная цель в заявляемом способе выявления дефектов в ферромагнитных объектах, заключающемся в том, что контролируемый объект намагничивают постоянным магнитным полем, возбуждают с помощью вихретокового преобразователя на контролируемом участке вихревые токи, регистрируют вносимое в вихретоковый преобразователь напряжение Uвн и по нему судят о наличии дефектов, достигается благодаря тому, что плавно изменяют напряженность Н постоянного магнитного поля от минимальной величины до максимальной, изменяя регулируемый параметр контроля Р, регистрируют максимум Uмакс амплитуды вносимого в вихретоковый преобразователь напряжения 
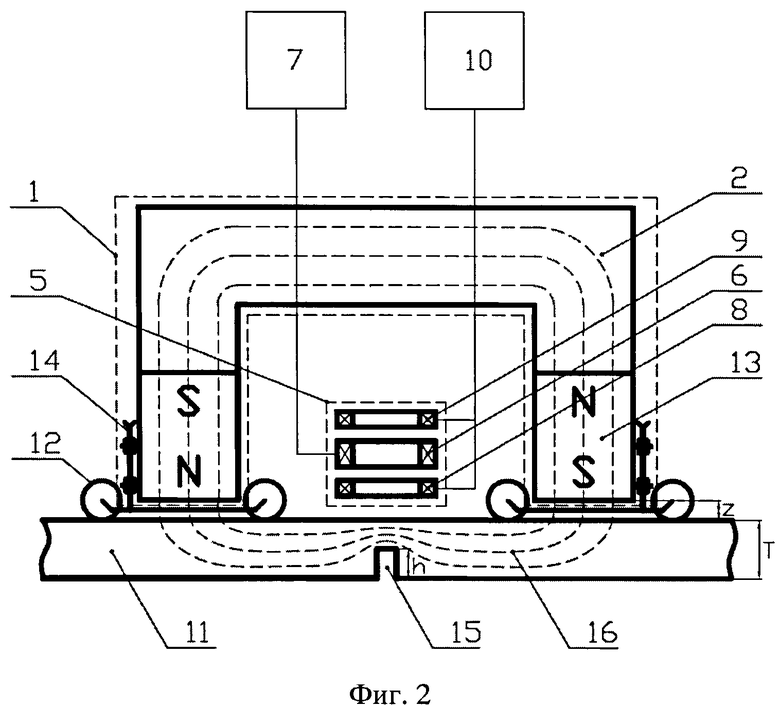
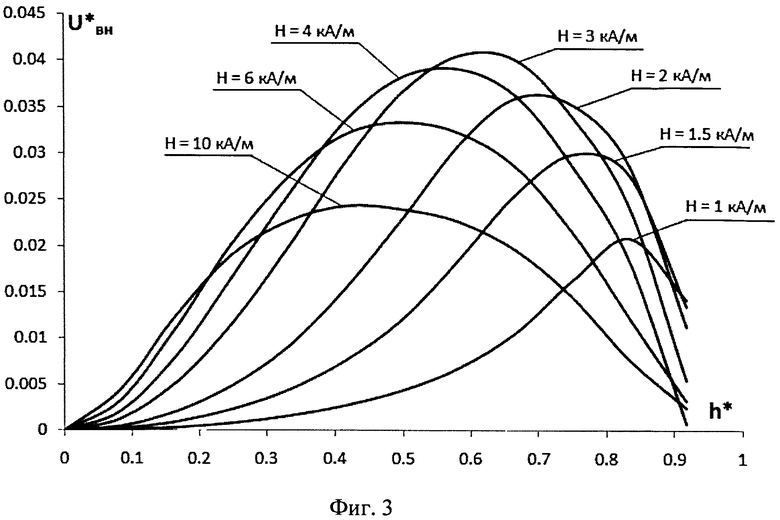
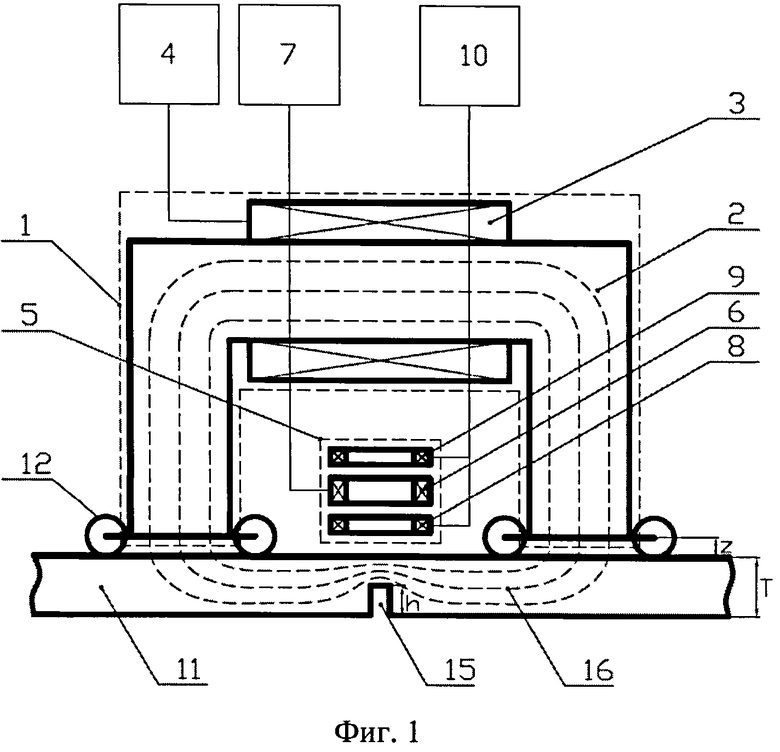
На фиг.1, 2 представлены схемы контроля, согласно заявляемому способу; на фиг.3 - зависимости амплитуды Uвн* от относительной глубины подповерхностного дефекта при разных значениях напряженности Н намагничивающего постоянного магнитного поля.
Заявляемый способ реализуется с помощью одной из двух схем контроля, представленных на фиг.1 и 2. Схема на фиг.1 состоит из системы 1 намагничивания, образованной П-образным магнитопроводом 2 и обмоткой 3, подключенной к регулируемому источнику 4 постоянного тока, вихретокового преобразователя 5, возбуждающая обмотка 6 которого подключена к генератору 7 гармонического напряжения, а измерительная 8 и компенсационная 9 обмотки - к электронному блоку 10 обработки и отображения информации. Изменение уровня напряженности магнитного поля в образце осуществляется путем задания выходного тока I источника 4 постоянного тока, являющегося параметром контроля Р. Зазор z между системой 1 намагничивания и контролируемым объектом 11 остается постоянным и обеспечивается опорными роликами 12, обеспечивающими также возможность сканирования. Схема на фиг.2 состоит из системы 1 намагничивания, образованного П-образным магнитопроводом 2 с постоянными магнитами 13, вихретокового преобразователя 5, возбуждающая обмотка 6 которого подключена к генератору 7 гармонического напряжения, а измерительная 8 и компенсационная 9 обмотки - к электронному блоку 10 обработки и отображения информации. Изменение уровня напряженности магнитного поля в образце осуществляется путем изменения зазора z между системой 1 намагничивания и контролируемым объектом 11, являющегося параметром контроля Р. Для изменения зазора z могут быть использованы упорные регулировочные винты 14, связанные с опорными роликами 12, обеспечивающими возможность сканирования.
Вихретоковый преобразователь 2 расположен в межполюсном пространстве системы 1 намагничивания симметрично относительно ее полюсов. Рабочий торец вихретокового преобразователя и рабочие торцы системы намагничивания лежат в параллельных плоскостях.
На фиг.1, 2 показан контролируемый объект 12 в виде ферромагнитной пластины толщиной Т с подповерхностным дефектом 15 глубиной h и силовые линии 16 индукции В намагничивающего поля.
С помощью схемы на фиг.1 заявляемый способ реализуется следующим образом. Контролируемый объект 12 намагничивают постоянным магнитным полем. Для этого с помощью регулируемого источника 4 постоянного тока задают минимальный ток намагничивания Iмин. В общем случае значение тока намагничивания Iмин на начальном этапе может быть равно 0. Выбирают задаваемую генератором 7 гармонического напряжения частоту возбуждаемых вихревых токов из условия их проникновения в тонкий поверхностный слой контролируемого объекта 12, возбуждают с помощью вихретокового преобразователя 5 вихревые токи в контролируемом объекте. Выходное напряжение вихретокового преобразователя 5 компенсируют на бездефектном участке контролируемого объекта 11 с помощью электронного блока 10, производят сканирование контролируемого объекта системой контроля при неизменном зазоре z, обеспечиваемом опорными роликами 12, фиксируют максимум Uмакс амплитуды вносимого в вихретоковый преобразователь напряжения 
С помощью схемы на фиг.2 заявляемый способ реализуется следующим образом. Контролируемый объект 11 намагничивают постоянным магнитным полем. Для этого с помощью упорных регулировочных винтов 14 устанавливают зазор z между полюсами магнитной системы и объектом контроля равный zмакс. В общем случае zмакс может быть равен бесконечности, т.е. система намагничивания может быть удалена. Выбирают задаваемую генератором 7 гармонического напряжения частоту возбуждаемых вихревых токов из условия их проникновения в тонкий поверхностный слой контролируемого объекта 11, возбуждают с помощью вихретокового преобразователя 5 вихревые токи в контролируемом объекте. Выходное напряжение вихретокового преобразователя 5 компенсируют на бездефектном участке контролируемого объекта 11 с помощью электронного блока 10 и производят сканирование контролируемого объекта системой контроля при неизменном зазоре z, фиксируют максимум Uмакс амплитуды вносимого в вихретоковый преобразователь напряжения 
Вихретоковый преобразователь 5 в обеих схемах может иметь произвольную конструкцию, однако рекомендуется применять преобразователь, состоящий из возбуждающей обмотки 6, измерительной обмотки 8 и компенсационной обмотки 9, изображенный на фиг.1, 2. Измерительная обмотка 8 и компенсационная обмотка 9 преобразователя включены по дифференциальной схеме.
При наличии подповерхностного дефекта магнитный поток, создаваемый системой 1 намагничивания, перераспределяется и концентрируется над дефектом 15. По этой причине дифференциальная магнитная проницаемость µd=dB/dH металла над дефектом 15, в том числе и на поверхности контролируемого объекта 11, изменяется. При изменении µd, связанного с воздействием подповерхностного дефекта, происходит изменение электромагнитного взаимодействия вихретокового преобразователя 5 с металлом. В результате изменяется величина вносимого в вихретоковый преобразователь напряжения и происходит регистрация сигнала, обусловленного влиянием подповерхностного дефекта с помощью электронного блока 10 обработки и отображения информации. При изменении параметра контроля Р картина перераспределения µd в контролируемом объекте 11 над дефектом 15 меняется, что приводит к изменению амплитуды сигнала преобразователя.
За счет того, что формируемое подповерхностным дефектом изменение µd считывается вихретоковым преобразователем 5 непосредственно с поверхности контролируемого объекта 11, нет необходимости в применении низкочастотных вихревых токов, проникающих вглубь металла. За счет этого размеры рабочего торца вихретокового преобразователя при реализации данного способа соответствуют стандартным размерам высокочастотных вихретоковых преобразователей и могут составлять величину порядка 1…5 мм, в зависимости от особенностей решаемой задачи. По той же причине, способ может быть реализован без создания в материале объекта контроля состояния магнитного насыщения, необходимого для формирования над поверхностью объекта контроля потоков рассеяния, надежно фиксируемых магниточувствительными элементами, что затруднительно для массивных объектов контроля.
При реализации обеих схем контроля для получения информации о наличии и параметрах подповерхностного дефекта недостаточно считывания сигнала, регистрируемого вихретоковым преобразователем 5, при одном значении параметра контроля Р. Это происходит из-за неоднозначности зависимостей Uвн*=Uвн*(h*), приведенных на фиг.3. Данные зависимости приведены для листа из стали марки Ст 45 для разных значений напряженности Н поля намагничивания. По оси ординат здесь отложена величина относительного приращения амплитуды Uвн*=ΔUвн/U0, где U0 - напряжение наводимое на измерительную обмотку 8 в режиме "холостого хода", т.е. при отсутствии взаимодействия вихретокового преобразователя 5 с металлом, по оси абсцисс - относительная глубина подповерхностного дефекта h*=h/T. Из приведенных зависимостей видно, что начиная с некоторого значения относительной глубины h* наблюдается стабилизация ΔUвн*, а затем и его уменьшение. Это может привести к пропуску наиболее опасного предсквозного дефекта. Данный характер зависимости Uвн*=Uвн*(h*) сохраняется при изменении напряженности H поля намагничивания. Это объясняется особенностями формирования µd на поверхности контролируемого объекта при увеличении глубины дефекта 15 [3]. Однако из зависимостей, приведенных на фиг.3. видно, что для разных значений относительной глубины подповерхностного дефекта h* максимальное значение относительного приращения амплитуды сигнала Uвн* достигается при разных значениях напряженности Н поля намагничивания. При этом видна однозначная закономерность - чем меньше относительная глубина дефекта h*, тем при большей напряженности Н поля намагничивания наступает максимум относительного приращения амплитуды сигнала Uвн*. Таким образом, соотношение значений Н и Uвн* позволяет получить однозначную информацию о наличии и глубине подповерхностных дефектов.
Поскольку измерить значение напряженности Н поля намагничивания в объекте контроля затруднительно, а чаще всего невозможно, вводится параметр контроля Р, однозначно связанный с Н. Однако значение параметра Р не позволяет судить о численном значении Н. Поэтому перед проведением контроля необходимо установить связь между Р, Uвн* и h* в виде таблиц или зависимостей, аналогичных фиг.3, с использованием эталонных образцов из заданного материала заданной толщины с предварительно нанесенными дефектами различной глубины.
Заявляемый способ по сравнению с прототипом обладает большей чувствительностью и информативностью контроля, так как обеспечивает измерение реакции дефекта при оптимальной величине намагничивания и позволяет количественно интерпретировать регистрируемые сигналы.
Источники информации
1. Неразрушающий контроль: Справочник: В 7 т. Под общ. ред. В.В. Клюева. Т.6: В 3 кн.. Кн.1. Магнитные методы контроля. / В.В. Клюев, В.Ф. Мужицкий, Э.С. Горкунов, В.Е. Щербинин. - М.: Машиностроение, 2004. - С.96-98.
2. Неразрушающий контроль: Справочник: В 7 т. Под общ. ред. В.В. Клюева. Т.6: В 3 кн.. Кн.1. Магнитные методы контроля. / В.В. Клюев, В.Ф.Мужицкий, Э.С. Горкунов, В.Е. Щербинин. - М.: Машиностроение, 2004. - С.96-98.
3. Патент РФ №2442151 Способ выявления подповерхностных дефектов в ферромагнитных объектах G01N 27/90. Приоритет от 10.02.2010 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫЯВЛЕНИЯ ПОДПОВЕРХНОСТНЫХ ДЕФЕКТОВ В ФЕРРОМАГНИТНЫХ ОБЪЕКТАХ | 2010 |
|
RU2442151C2 |
| УСТРОЙСТВО ДЛЯ ВИХРЕТОКО-МАГНИТНОЙ ДЕФЕКТОСКОПИИ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2014 |
|
RU2566416C1 |
| УСТРОЙСТВО ДЛЯ ВИХРЕТОКОВОЙ ДЕФЕКТОСКОПИИ ФЕРРОМАГНИТНЫХ ТРУБ СО СТОРОНЫ ИХ ВНУТРЕННЕЙ ПОВЕРХНОСТИ | 2015 |
|
RU2634544C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТРЕЩИН В НЕМАГНИТНЫХ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТАХ | 2014 |
|
RU2584726C1 |
| Способ электромагнитного контроля ферромагнитных объектов | 1982 |
|
SU1062593A1 |
| Вихретоковый проходной преобразователь для неразрушающего контроля стрендовых канатов | 2022 |
|
RU2781153C1 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ДЕФЕКТОСКОПИИ | 2022 |
|
RU2796194C1 |
| МАГНИТНЫЙ ДЕФЕКТОСКОП ДЛЯ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В СВАРНЫХ ШВАХ | 2015 |
|
RU2587695C1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ МЕДНОЙ КАТАНКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2542624C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ДЕФЕКТОВ МАЛЫХ ЛИНЕЙНЫХ РАЗМЕРОВ | 2014 |
|
RU2564823C1 |
Изобретение относится к неразрушающему контролю и может быть использовано для выявления подповерхностных дефектов в ферромагнитных объектах. Сущность изобретения заключается в том, что в предлагаемом способе контролируемый объект намагничивают постоянным магнитным полем, возбуждают с помощью вихретокового преобразователя на контролируемом участке вихревые токи, регистрируют вносимое в вихретоковый преобразователь напряжение 

1. Способ выявления дефектов в ферромагнитных объектах, заключающийся в том, что контролируемый объект намагничивают постоянным магнитным полем, возбуждают с помощью вихретокового преобразователя на контролируемом участке вихревые токи, регистрируют вносимое в вихретоковый преобразователь напряжение 
2. Способ по п.1, отличающийся тем, что воздействие постоянного магнитного поля на контролируемый объект изменяют за счет изменения тока электромагнита.
3. Способ по п.1, отличающийся тем, что воздействие постоянного магнитного поля на контролируемый объект изменяется за счет изменения рабочего зазора между рабочим торцом намагничивающей системы и поверхностью контролируемого объекта.
| СПОСОБ ВЫЯВЛЕНИЯ ПОДПОВЕРХНОСТНЫХ ДЕФЕКТОВ В ФЕРРОМАГНИТНЫХ ОБЪЕКТАХ | 2010 |
|
RU2442151C2 |
| US 20110037461 A1, 17.02.2011 | |||
| Способ вихретоковой дефектоскопии изделий | 1985 |
|
SU1335861A1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2319955C2 |

