Настоящий документ относится к области диагностической визуализации. Она находит конкретное применение в ускорении оценки рассеяния в сканере ядерной медицины и описана с конкретной ссылкой на него. Однако следует понимать, что она также находит применение в других сценариях использования и не обязательно ограничена указанным выше применением.
В сканерах ядерной медицинской визуализации, например сканерах позитронно-эмиссионной томографии (PET), типично 30% или больше обнаруживаемых совпадающих событий сталкиваются с рассеянием по меньшей мере один раз во время визуализации. Точная оценка количества рассеяния имеет значение при реконструкции ядерных медицинских изображений. Чаще всего при коммерческой реконструкции PET изображений используют способ моделирования одного рассеяния (SSS) для того, чтобы оценивать вклад рассеяния. Способ точен, когда большинство событий рассеяния представляют собой однократное рассеяние. Однако когда пациент крупнее, многократное рассеяние может вносить вклад в большую часть всех событий рассеяния. Следовательно, SSS более не является точным. Однако через моделирование способом Монте-Карло показано, что общая форма вклада рассеяния не изменяется значительно при добавлении множества рассеяний. Следовательно, SSS следует масштабировать для того, чтобы компенсировать вклад многократного рассеяния.
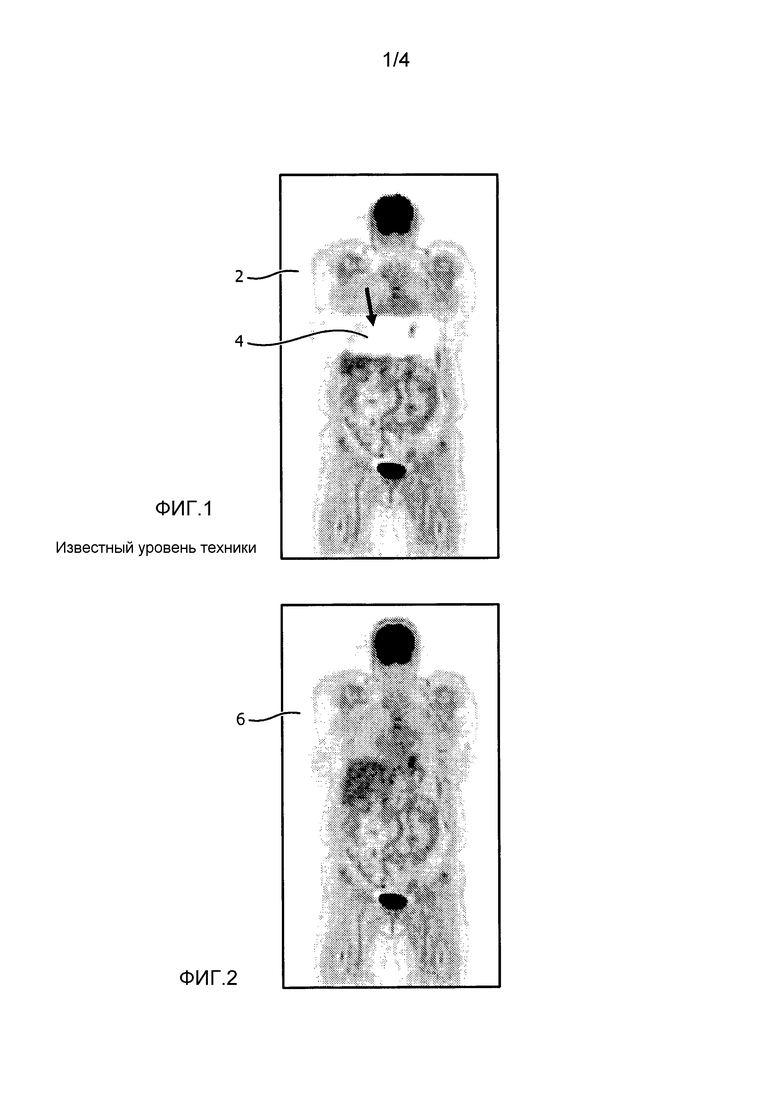
При реконструкции PET изображений типичный способ оценки коэффициента масштабирования для SSS представляет собой аппроксимацию «хвостовой» части SSS синограммы к измеряемой синограмме, где хвост относится к части синограммы, соответствующей внешней части визуализируемого объекта. В способе допускают, что хвостовая часть в измеряемых данных включает только вклад событий рассеяния. Это допущение справедливо для менее крупных пациентов, когда хвост доступен, и содержит в себе достаточно счетов. Однако при сканировании более крупного пациента хвостовая часть уменьшается в размере или исчезает (усекается). В случае, когда хвостовая часть меньшего размера или исчезает, аппроксимация хвоста может иметь значительную ошибку. Как видно на Фиг. 1, получаемое изображение 2 для крупного пациента типично страдает от чрезмерного вычитания рассеяния около областей 4 высокой концентрации.
Другой подход для точной оценки рассеяния состоит в том, чтобы осуществлять полное моделирование способом Монте-Карло для того, чтобы получать формы как от первичного вклада, так и от вклада рассеяния. Это требует значительного количества вычислений и, следовательно, является слишком медленным для коммерческой системы ядерной медицинской визуализации.
Настоящий документ предоставляет новые и усовершенствованные способы и системы, в которых преодолены указанные выше проблемы и другое.
В соответствии с одним аспектом предоставлено устройство обработки изображений. Устройство обработки изображений представляет собой процессор моделирования рассеяния, который обрабатывает измеряемые синограммы, сгенерированные по данным визуализации, полученным для субъекта визуализации посредством устройства визуализации для того, чтобы получить синограмму рассеяния, которая характеризует форму вклада рассеяния. Процессор масштабирования рассеяния использует моделирование способом Монте-Карло для того, чтобы определять фракцию рассеяния и масштабирует синограмму рассеяния для того, чтобы генерировать масштабированную синограмму рассеяния, которая совпадает с вкладом рассеяния на измеряемой синограмме. Процессор реконструкции реконструирует данные визуализации в представление изображения с использованием масштабированной синограммы рассеяния для коррекции рассеяния.
В соответствии с другим аспектом предоставлен способ обработки изображений. Способ обработки изображений включает обработку измеряемых синограмм, сгенерированных из данных визуализации, полученных для субъекта визуализации посредством устройства визуализации, получение синограммы рассеяния, которая характеризует форму вклада рассеяния, определение фракции рассеяния и масштабирование синограммы рассеяния для того, чтобы генерировать масштабированную синограмму рассеяния, которая совпадает с вкладом рассеяния на измеряемой синограмме, и реконструирование данных визуализации в представление изображения с использованием масштабированной синограммы рассеяния для коррекции рассеяния.
В соответствии с другим аспектом предоставлен способ обработки изображений. Способ обработки изображений включает в себя, используя PET сканер, генерирование множества событий с помощью SSS и краткое моделирование способом Монте-Карло для того, чтобы определять вероятность того, что пара обнаруживаемых событий имеет обнаруженное рассеяние, и реконструирование множества генерируемых событий в представление изображения.
Одно преимущество основано на более точной оценке вклада рассеяния в сканерах ядерной медицины.
Другое преимущество основано на более быстрой оценке рассеяния в сканерах ядерной медицины.
Другое преимущество основано на улучшенном качестве изображения и количественной точности для сканеров ядерной медицины.
Другое преимущество основано на оценке вклада рассеяния с использованием краткого моделирования способом Монте-Карло.
Другое преимущество основано на устранении аппроксимации хвоста при оценке вклада рассеяния.
Другое преимущество основано на более быстрой реконструкции изображений.
Другое преимущество основано на улучшенной пропускной способности для субъектов.
Другие дополнительные преимущества по настоящему изобретению примут во внимание специалисты в данной области при прочтении и осмыслении следующего подробного описания.
Изобретение может принимать форму различных компонентов и компоновок компонентов, а также различных этапов и последовательностей этапов. Чертежи лишь служат цели иллюстрирования предпочтительных вариантов осуществления и их не следует рассматривать как ограничение изобретения.
На Фиг. 1 представлена образцовая реконструкция PET изображений известного уровня техники с SSS оценкой рассеяния с использованием аппроксимации хвоста.
На Фиг. 2 представлена образцовая реконструкция PET изображений с SSS оценкой рассеяния с использованием масштабирования с моделированием способом Монте-Карло в соответствии с настоящим документом.
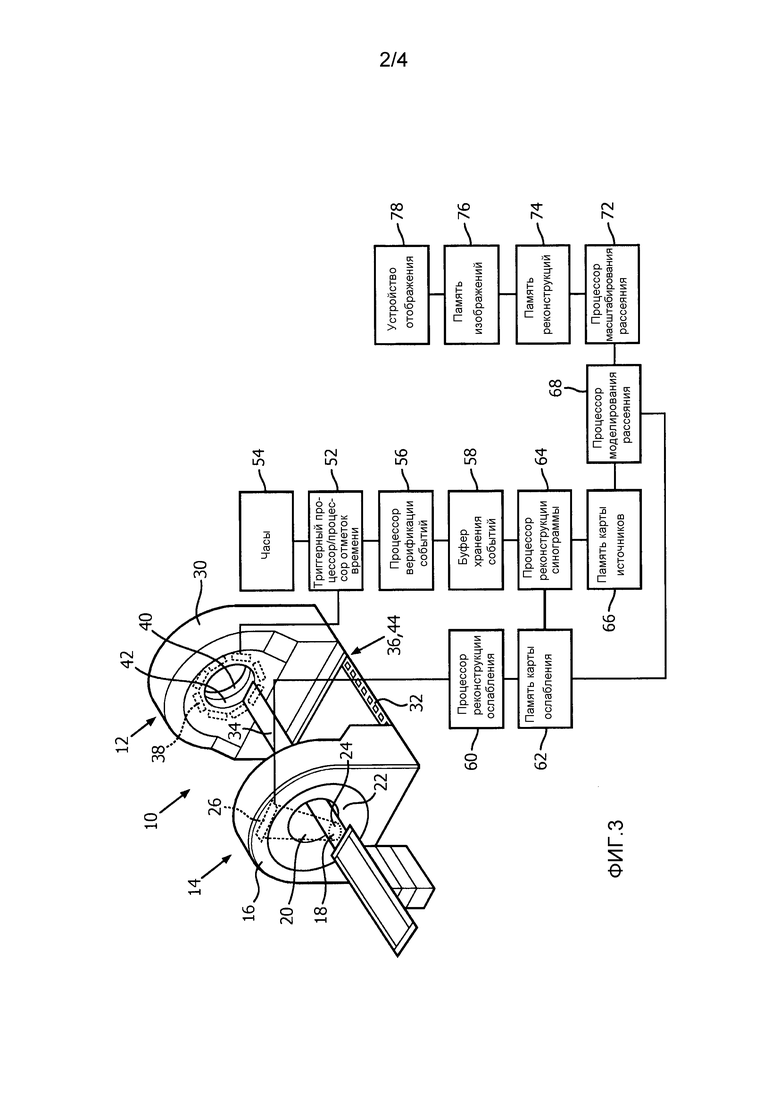
На Фиг. 3 представлена схематическая иллюстрация системы визуализации в соответствии с настоящим документом.
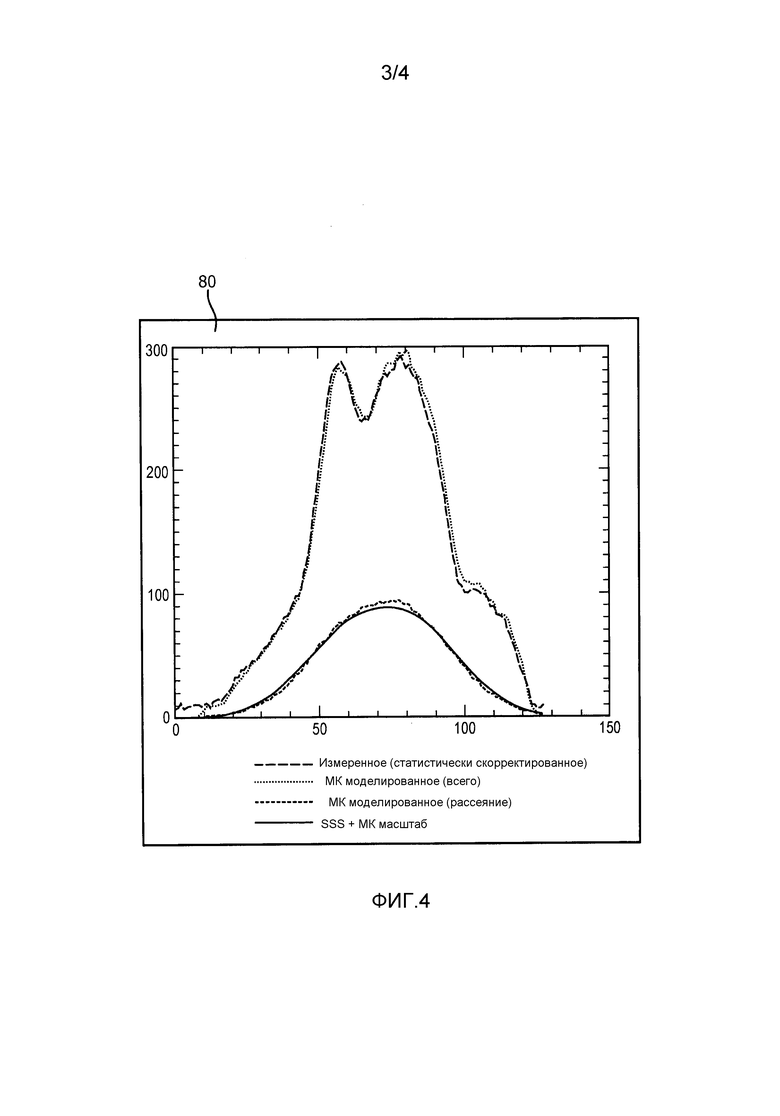
На Фиг. 4 представлена схематическая иллюстрация сравнения профилей из измерений и данных моделирования в соответствии с настоящим документом.
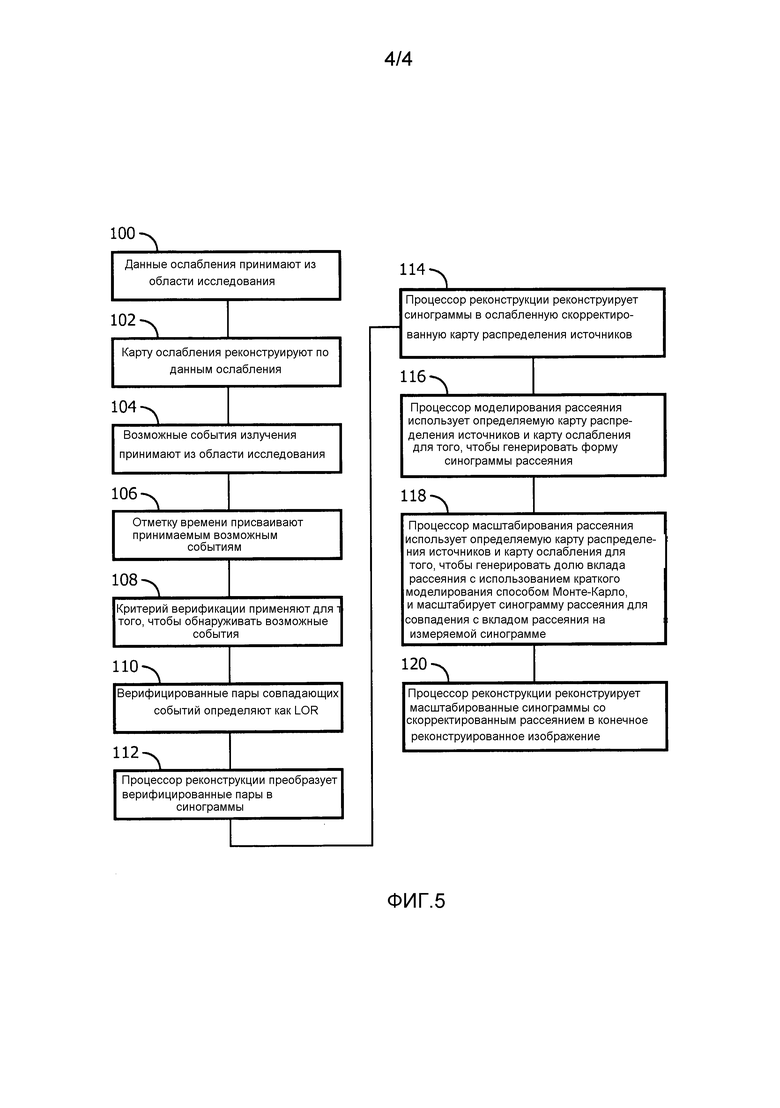
На Фиг. 5 представлена иллюстрация блок-схемы способа обработки изображений в соответствии с настоящим документом.
В настоящем изобретении используют моделирование способом Монте-Карло для того, чтобы быстро получать соотношение между первичными и рассеянными парами фотонов в измеряемых PET данных для каждого конкретного пациента. Моделирование способом Монте-Карло основано на карте распределения источников и ослабления. Полученное соотношение используют для того, чтобы масштабировать синограмму, генерируемую по моделированию одного рассеяния (SSS), чтобы близко аппроксимировать масштабированную синограмму к общему рассеянию на измеряемой синограмме. Как видно на Фиг. 2, получаемое изображение 6, реконструированное с использованием SSS с коэффициентом масштабирования, полученным из краткого моделирования способом Монте-Карло, устраняет проблему чрезмерного вычитания сканера, представленную на Фиг. 1. Дополнительно, поскольку требуется только соотношение, нет необходимости для того, чтобы моделировать большое количество событий в моделировании способом Монте-Карло, и, следовательно, ограничено необходимое дополнительное время вычислений. Таким образом, более точную коррекцию рассеяния при PET реконструкции осуществляют для всех различных размеров визуализируемого объекта без значительного увеличения времени вычислений.
Со ссылкой на Фиг. 3, мультимодальная система 10 содержит первую систему визуализации, например функциональную модальность, предпочтительно систему 12 ядерной визуализации, и вторую систему визуализации, например анатомическую модальность, такую как сканер 14 компьютерной томографии (CT). CT сканер 14 содержит невращающийся портал 16. Рентгеновскую трубку 18 устанавливают на вращающийся портал 20. Канал 22 определяет область 24 исследования CT сканера 14. Массив детекторов 26 излучения располагают на вращающемся портале 20 для того, чтобы принимать излучение от рентгеновской трубки 18 после того, как рентгеновские лучи пересекают область 24 исследования. Альтернативно, массив детекторов 26 может быть расположен на невращающемся портале 16. Конечно, также предусмотрены магнитный резонанс и другие модальности визуализации.
Система 12 функциональной или ядерной визуализации в проиллюстрированном варианте осуществления, содержит сканер 30 позитронно-эмиссионной томографии (PET), который можно устанавливать на направляющих 32 для того, чтобы содействовать доступу к пациенту. Конечно, также предусмотрены SPECT, CT, ядерная медицинская визуализация, функциональная магнитно-резонансная визуализация (fMRI) и другие модальности визуализации. Направляющие 32 идут параллельно продольной оси опоры или кушетки 34 субъекта, таким образом позволяя CT сканеру 14 и PET сканеру 12 формировать закрытую систему. Двигатель и привод 36 предоставлены для того, чтобы перемещать PET сканер 12 в и из закрытого положения. Детекторы 38 расположены вокруг канала 40, который определяет область 42 исследования. В проиллюстрированной PET системе детекторы 38 располагают в стационарном кольце, несмотря на то, что вращающиеся головки также предусмотрены. В SPECT системе детекторы 38 типично встраивают в отдельные головки, которые устанавливают для вращательного и радиального движения относительно пациента. Двигатель и привод 44 или тому подобное обеспечивает продольное движение и вертикальную корректировку опоры субъекта 34 в областях 24 исследования, 42. Также предусмотрены установленные CT и PET системы в единой закрытой совместно используемой системе с общей областью исследования.
Продолжая со ссылкой на Фиг. 3, опору субъекта 34, которая несет субъекта, перемещают в область 24 исследования CT сканера 14. CT сканер 14 генерирует данные ослабления излучения, которые затем использует процессор 60 реконструкции ослабления для того, чтобы реконструировать данные ослабления излучения в карту ослабления, которую хранят в памяти 62 карты ослабления.
Опора пациента 34 перемещает субъекта в PET сканер 12 в положении, которое геометрически и механически определяют как являющееся таким же, как визуализированное положение в области 24 CT визуализации. Перед началом PET сканирования субъекту делают инъекцию радиофармацевтического средства. При PET сканировании пару гамма-лучей получают с помощью события позитронной аннигиляции в области 42 исследования, и они перемещаются в противоположных направлениях. Когда гамма-луч сталкивается с детекторами 38, регистрируют местоположение детекторного элемента, где произошло столкновение, и время столкновения, триггерный процессор 52 осуществляет мониторинг энергетических всплесков в каждом детекторе 38, например, интегральной площади под импульсом, характеристики энергии гамма-лучей, генерируемых радиофармацевтическим средством. По энергии или интегральной площади каждое событие идентифицируют как нерассеянное событие или событие рассеяния. Триггерный процессор 52 проверяет часы 54 и создает отметки времени для каждого обнаруживаемого гамма-луча с использованием времени отметки приема переднего фронта. При PET визуализации отметку времени, оценку энергии и оценку местоположения детектора сначала использует процессор 56 верификации событий для того, чтобы определять, имеет ли место совпадающее событие. Принятые пары совпадающих событий определяют линии ответа (LOR). Когда процессор 56 верификации событий верифицирует пару событий, LOR переходит в буфер 58 хранения событий с их отметками времени и сохраняет в списке в буфере 58 хранения событий в качестве данных события, т.е. в виде данных в режиме списка.
Процессор 64 реконструкции синограммы реконструирует верифицированные пары в представление изображения субъекта. В одном из вариантов осуществления процессор 64 реконструкции синограммы преобразует верифицированные пары в синограммы и осуществляет доступ к данным ослабления, хранимым в памяти 62 карты ослабления, и реконструирует синограммы в скорректированную по ослаблению карту распределения источников. Скорректированную по ослаблению карту распределения источников хранят в памяти 66 карты источников. Также предусмотрено, что можно использовать другие алгоритмы реконструкции, включая алгоритмы, работающие непосредственно с данными в режиме списка, такими как максимизация ожидания упорядоченных поднаборов в режиме списка (OSEM) и реконструкция в режиме списка с реконструкцией по времени пролета (TOF), и т.д.
Процессор 68 моделирования рассеяния использует определяемую карту распределения источников и карту ослабления для того, чтобы генерировать форму синограммы рассеяния. Процессор 72 масштабирования рассеяния также использует определяемую карту распределения источников и карту ослабления для того, чтобы генерировать соотношение вклада рассеяния с использованием краткого моделирования способом Монте-Карло. В одном из вариантов осуществления моделирование способом Монте-Карло осуществляют до тех пор, пока не стабилизируется вычисляемое соотношение. Когда соотношение становится стабильным, моделирование способом Монте-Карло можно заканчивать, чтобы снижать время обработки. SSS синограмму масштабируют для того, чтобы определять масштабированную синограмму рассеяния. Процессор 74 реконструкции использует масштабированную синограмму рассеяния и реконструирует пары событий в конечное реконструированное изображение с коррекцией ослабления и рассеяния. Конечное реконструированное изображение хранят в памяти 76 изображений и отображают пользователю на устройстве 78 отображения, печатают, сохраняют для последующего использования и т.п.
В частности, данные измеряемого события (после статистической коррекции) включают первичные и рассеянные совпадающие события. Моделирование одного рассеяния (SSS) в процессоре 68 моделирования рассеяния позволяет моделировать однократное рассеяние по заданному распределению источников и соответствующей карте ослабления. Процессор 72 масштабирования рассеяния определяет коэффициент масштабирования при использовании моделирования способом Монте-Карло, используя распределение источников и соответствующую карту ослабления. В моделировании способом Монте-Карло множество пар фотонов генерируют согласно распределению источников. Траекторию каждого фотона на карте ослабления отслеживают до тех пор, пока фотон не вылетит из визуализируемого объекта. Вылетевший фотон может ударяться о детектор, и, следовательно, его обнаруживают. Совпадающее событие регистрируют, если обнаруживают оба фотона из позитронной аннигиляции. Событие помечают как первичное, если ни один из обнаруженных фотонов не рассеян. Событие помечают как событие рассеяния, если один или оба фотона столкнулись с одним или более комптоновскими рассеяниями в ослабляющей среде. Соотношение всех обнаруживаемых событий рассеяния и всех обнаруживаемых событий представляет фракцию рассеяния. Фракция рассеяния меняется с числом позитронных аннигиляций и в конечном итоге стабилизируется на определенном значении rsc. Фракция рассеяния, получаемая из моделирования способом Монте-Карло, представляет собой хорошую аппроксимацию фактической фракции рассеяния в измеряемых совпадающих событиях. Коэффициент масштабирования для SSS синограммы после этого получают с помощью следующей формулы:

где Tmeasured представляет собой общее число счетов на измеряемой синограмме и TSSS представляет собой общее число счетов в SSS синограмме. SSS синограмму масштабируют на k, чтобы получать оцененную синограмму рассеяния. Процессор 74 реконструкции использует масштабированную SSS синограмму и реконструирует конечное реконструированное изображение.
На Фиг. 4 проиллюстрированы линейные профили 80 из синограмм, полученных по измеряемым данным (после статистической коррекции), данных моделирования способом Монте-Карло, моделированных способом Монте-Карло данных рассеяния и SSS данных рассеяния после масштабирования с использованием коэффициента масштабирования, описанного выше. Как показано, (1) результат моделирования способом Монте-Карло совпадает с измеряемыми данными и (2) SSS моделирование совпадает с общим рассеянием, получаемым из моделирования способом Монте-Карло.
Триггерный процессор 52, процессор 56 верификации событий, процессор 60 реконструкции ослабления, процессор 64 реконструкции синограммы, процессор 68 моделирования рассеяния и процессор 72 масштабирования рассеяния включают процессор, например микропроцессор или другое управляемое программным обеспечением устройство, выполненное с возможностью исполнять программное обеспечение для осуществления описанных выше операций. Типично, программное обеспечение содержит постоянная память или машиночитаемый носитель для исполнения процессором. Типы машиночитаемых носителей включают в себя память, такую как привод жесткого диска, CD-ROM, DVD-ROM и т.п. Также предусмотрены другие реализации процессора. Контроллеры устройства отображения, специализированные интегральные схемы (ASIC), FPGA и микроконтроллеры представляют собой иллюстративные примеры компонентов других типов, которые можно реализовать для того, чтобы предоставлять функции процессора. Варианты осуществления можно реализовать с использованием программного обеспечения для исполнения посредством процессора, аппаратного обеспечения или некоторого их сочетания.
На Фиг. 5 проиллюстрирован способ обработки изображений. На этапе 100 данные ослабления принимают из области исследования. Карту ослабления реконструируют из принимаемых данных ослабления на этапе 102. На этапе 104 возможные события излучения принимают из области исследования. На этапе 106 принимаемым событиям присваивают отметку времени. На этапе 108 критерий верификации применяют для того, чтобы обнаруживать совпадающие события. На этапе 110 верифицированные пары совпадающих событий определяют как LOR. На этапе 112 процессор реконструкции преобразует верифицированные пары в синограммы. На этапе 114 процессор реконструкции реконструирует синограммы в скорректированную по ослаблению карту распределения источников. Процессор моделирования рассеяния использует определяемую карту распределения источников и карту ослабления для того, чтобы генерировать форму синограммы рассеяния на этапе 116. На этапе 118 процессор масштабирования рассеяния использует определяемую карту распределения источников и карту ослабления для того, чтобы генерировать соотношение вклада рассеяния с кратким моделированием способом Монте-Карло, и масштабирует синограмму рассеяния, чтобы соответствовать вкладу рассеяния на измеряемой синограмме. На этапе 120 процессор реконструкции реконструирует конечное реконструированное изображение, используя масштабированную синограмму рассеяния и измеряемые совпадающие события или синограммы.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. Модификации и изменения могут приходит на ум после прочтения и осмысления предшествующего подробного описания. Подразумевается, что изобретение сконструировано как включающее в себя все такие модификации и изменения, пока они входят в объем приложенной формулы изобретения или ее эквивалентов.
Использование: для ядерной медицинской визуализации. Сущность изобретения заключается в том, что устройство обработки изображений содержит процессор моделирования рассеяния, который обрабатывает измеряемые синограммы, сгенерированные из данных визуализации, полученных для субъекта визуализации посредством устройства визуализации, чтобы получить синограмму рассеяния, которая характеризует форму вклада рассеяния. Процессор масштабирования рассеяния использует моделирование способом Монте-Карло для того, чтобы определять фракцию рассеяния, и масштабирует синограмму рассеяния для того, чтобы генерировать масштабированную синограмму рассеяния, которая совпадает с вкладом рассеяния на измеряемой синограмме. Процессор реконструкции реконструирует данные визуализации в представление изображения с использованием масштабированной синограммы рассеяния для коррекции рассеяния. Технический результат: повышение качества изображения. 3 н. и 12 з.п. ф-лы, 5 ил.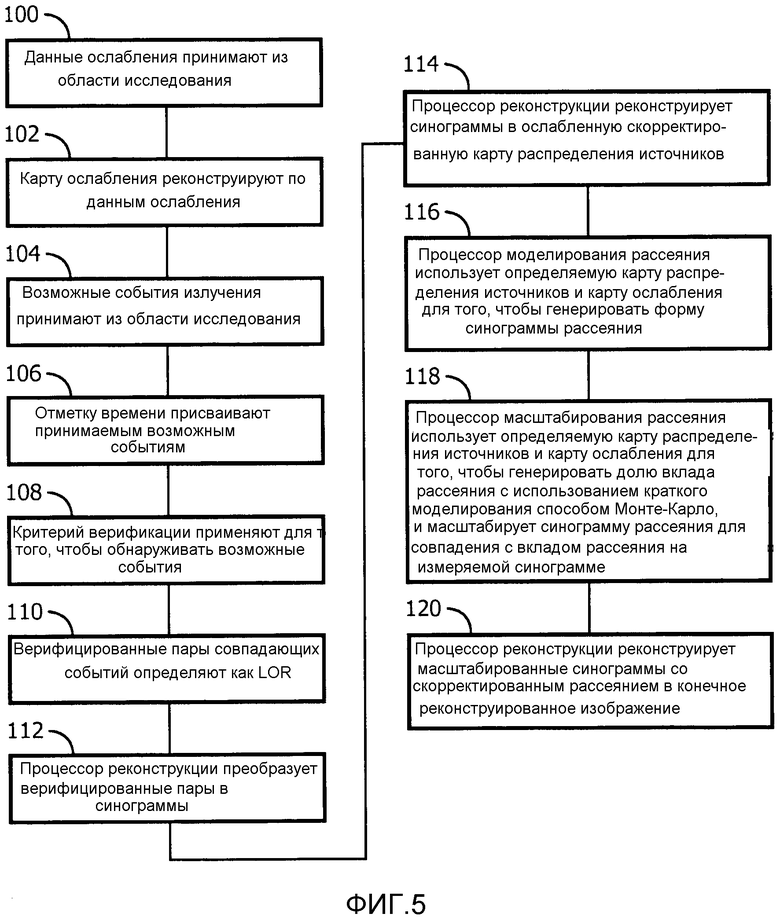
1. Устройство обработки изображений, содержащее:
процессор (68) моделирования рассеяния, который обрабатывает измеряемые синограммы, сгенерированные по данным визуализации, полученным для субъекта визуализации посредством устройства (30) визуализации, чтобы получить синограмму рассеяния, которая характеризует форму вклада рассеяния;
процессор (72) масштабирования рассеяния, который использует моделирование способом Монте-Карло для того, чтобы определять фракцию рассеяния, и масштабирует синограмму рассеяния для того, чтобы генерировать масштабированную синограмму рассеяния, которая совпадает с вкладом рассеяния на измеряемой синограмме; и
процессор (74) реконструкции, который реконструирует данные визуализации в представление изображения с использованием масштабированной синограммы рассеяния для коррекции рассеяния.
2. Устройство обработки изображений по п. 1, в котором процессор (72) масштабирования рассеяния осуществляет моделирование фотонных событий способом Монте-Карло по начальному распределению источников и траектории моделированных фотонных событий через карту ослабления для того, чтобы определять рассеянные фотонные события, и определяет соотношение общего числа моделированных событий рассеяния фотонов к общему числу моделированных фотонных событий, причем соотношение представляет собой фракцию рассеяния.
3. Устройство обработки изображений по п. 1, в котором процессор (74) реконструкции изначально реконструирует данные визуализации в начальное распределение источников с использованием карты ослабления, при этом процессор (72) масштабирования рассеяния выполнен с возможностью:
a) используя моделирование способом Монте-Карло, моделировать множество моделированных пар фотонных событий с помощью начального распределения источников и отслеживать траектории каждого моделированного фотонного события через карту ослабления для того, чтобы определять, сталкиваются ли оба моделированных фотонных события каждой моделированной пары фотонных событий с местоположением детектора и рассеивается ли любое моделированное фотонное событие из каждой обнаруживаемой моделированной пары фотонных событий;
b) определять соотношение (i) общего числа моделированных пар фотонных событий, которые сталкиваются с местоположением детектора и в которых одно или более из моделированных фотонных событий рассеиваются, к (ii) общему числу пар рассеянных фотонных событий, оба из которых сталкиваются с местоположением детектора, причем соотношение представляет собой фракцию рассеяния.
4. Устройство обработки изображений по п. 1, в котором
устройство (30) визуализации представляет собой гамма-камеру, и данные визуализации, полученные от субъекта визуализации посредством гамма-камеры, представляют собой данные однофотонной эмиссионной компьютерной томографии (SPECT); и
процессор (74) реконструкции изначально реконструирует данные визуализации в начальное распределение источников с использованием карты ослабления, причем процессор (72) масштабирования рассеяния выполнен с возможностью:
a) используя моделирование способом Монте-Карло, моделировать множество моделированных фотонных событий с помощью начального распределения источников и отслеживать траекторию каждого моделированного фотонного события через карту ослабления для того, чтобы определять, сталкивается ли каждое моделированное фотонное событие с местоположением детектора и рассеивается ли каждое моделированное фотонное событие;
b) определять соотношение (i) общего числа моделированных фотонных событий, которые сталкиваются с местоположением детектора и рассеиваются, к (ii) общему числу моделированных фотонных событий, которые сталкиваются с местоположением детектора, причем соотношение представляет собой фракцию рассеяния.
5. Устройство обработки изображений по любому одному из пп. 2-4, в котором процессор масштабирования рассеяния дополнительно выполнен с возможностью итеративно повторять этап моделирования способом Монте-Карло и этап определения соотношения.
6. Устройство обработки изображений по любому одному из пп. 2-4, дополнительно включающее в себя:
процессор (64) реконструкции синограммы, который преобразует данные визуализации субъекта, сгенерированные посредством устройства (30) визуализации, в синограммы, причем процессор (64) реконструкции синограммы генерирует начальное распределение источников из синограмм.
7. Устройство обработки изображений по любому одному из пп. 1-4, в котором процессор (72) масштабирования рассеяния использует моделирование одного рассеяния (SSS) для того, чтобы определять форму синограммы рассеяния.
8. Способ обработки изображений, содержащий:
обработку измеряемых синограмм, сгенерированных из данных визуализации, полученных для субъекта визуализации посредством устройства (30) визуализации;
получение синограммы рассеяния, которая характеризует форму вклада рассеяния;
определение фракции рассеяния и масштабирование синограммы рассеяния для того, чтобы генерировать масштабированную синограмму рассеяния, которая совпадает с вкладом рассеяния на измеряемой синограмме; и
реконструирование данных визуализации в представление изображения с использованием масштабированной синограммы рассеяния для коррекции рассеяния.
9. Способ по п. 8, в котором определение фракции рассеяния включает в себя:
моделирование фотонных событий способом Монте-Карло по начальному распределению источников и прохождению моделированных фотонных событий через карту ослабления для того, чтобы определять рассеянные фотонные события и определять соотношение общего числа рассеянных моделированных фотонных событий к общему числу моделированных фотонных событий.
10. Способ по п. 8, дополнительно включающий в себя изначальное реконструирование данных визуализации в начальное распределение источников с использованием карты ослабления, при этом определение фракции рассеяния включает в себя:
моделирование множества моделированных пар фотонных событий способом Монте-Карло, используя начальное распределение источников, и отслеживание траектории каждого моделированного фотонного события через карту ослабления для того, чтобы определять, сталкиваются ли оба моделированных фотонных события каждой моделированной пары фотонных событий с местоположением детектора и рассеивается ли любое моделированное фотонное событие из каждой обнаруживаемой моделированной пары фотонных событий; и
определение соотношения (i) числа моделированных пар фотонных событий, которые сталкиваются с местоположением детектора и в которых рассеивается одно или более фотонных событий, (ii) общего числа пар рассеянных фотонных событий, оба из которых сталкиваются с местоположением детектора, причем соотношение представляет собой фракцию рассеяния.
11. Способ по п. 8, в котором данные визуализации представляют собой данные однофотонной эмиссионной компьютерной томографии (SPECT), причем процессор реконструкции изначально реконструирует SPECT данные визуализации в начальное распределение источников с использованием карты ослабления, при этом масштабирование рассеяния включает в себя:
моделирование множества моделированных фотонных событий способом Монте-Карло, используя начальное распределение источников, и отслеживание траектории каждого моделированного фотонного события через карту ослабления для того, чтобы определять, сталкивается ли каждое моделированное фотонное событие с местоположением детектора и рассеивается ли каждое моделированное фотонное событие; и
определение соотношения числа моделированных фотонных событий, которые сталкиваются с местоположением детектора и рассеиваются, к общему числу моделированных фотонных событий, которые сталкиваются с местоположением детектора, причем соотношение представляет собой фракцию рассеяния.
12. Способ по любому одному из пп. 9-11, дополнительно включающий в себя повторение этапов моделирования способом Монте-Карло и определения соотношения до тех пор, пока соотношение не стабилизируется, и после этого масштабирование синограммы рассеяния.
13. Способ по любому одному из пп. 8-11, дополнительно включающий в себя определение формы вклада рассеяния с использованием моделирования одного рассеяния (SSS).
14. Способ обработки изображений по любому одному из пп. 8-11, дополнительно включающий в себя:
генерацию карты ослабления по данным ослабления излучения.
15. Постоянный машиночитаемый носитель, который содержит компьютерную программу, которая управляет одним или более процессорами для того, чтобы осуществлять способ по любому одному из пп. 8-11.
| US 2011142367A1, 16.06.2011 | |||
| US 2009016593A1, 15.01.2009 | |||
| US 2006072803A1, 06.04.2006 | |||
| US 2010078568A1, 01.04.2010 | |||
| ОБРАБОТКА ИЗОБРАЖЕНИЙ ПОЗИТРОННО-ЭМИССИОННОЙ ТОМОГРАФИИ С ИСПОЛЬЗОВАНИЕМ АНАТОМИЧЕСКОЙ МАСКИ РЕЖИМА СПИСКА | 2006 |
|
RU2413245C2 |
| RU 2010120767A, 10.01.2012. | |||

