В области медицинской визуализации все шире используют позитронную эмиссионную томографию (PET). В визуализирующей РЕТ-системе в объект, подлежащий визуализации, вводят радионуклид. Радионуклид испускает позитроны. Когда испускаемый позитрон сталкивается с электроном, происходит акт, далее событие аннигиляции, в котором позитрон и электрон уничтожаются. В результате события аннигиляции порождаются два гамма-кванта, разлетающихся, по существу, под углом 180 градусов один от другого. Визуализирующие РЕТ-системы используют детекторы, расположенные напротив один другого, для детектирования гамма-квантов, испускаемых объектом. Обычно применяют кольцо из детекторов для регистрации гамма-квантов, приходящих под каждым углом.
Сбор большого числа событий формирует информацию, необходимую для оценки объекта методами томографической реконструкции. Упомянутые события, при привязке к детекторным элементам, формируют линии срабатывания (LOR), которые можно обрабатывать гистограммным методом в зависимости от их геометрических характеристик для определения проекций или синограмм, подлежащих реконструкции. События можно также вводить в изображение по отдельности.
Следовательно, фундаментальным элементом сбора данных и реконструкции изображения является LOR: линия, пересекающая апертуру для пациента в системе. Можно получать дополнительную информацию о местоположении события. Во-первых, известно, что, в ходе снятия отсчетов и реконструкции способность системы к реконструкции (определению координат) точки не является пространственно-инвариантной по полю видения; а именно, выше в центре и постепенно снижается к периферии. Для описания упомянутой характеристики обычно используют функцию рассеяния точки (PSF). Разработаны инструментальные средства для использования PSF в процессе реконструкции. Во-вторых, время пролета (TOF) или разность по времени между прилетами гамма-квантов к каждому детектору, участвующему в регистрации пары, можно использовать для ограничения по LOR, на которых событие могло произойти с большей вероятностью.
По своему характеру PSF является трехмерной и, обычно, изменяется от изотропной с размером 4-6 мм в центре сканера до сильно асимметрично эллипсоидальной, с размером, изменяющимся от 6 до 8 мм, на периферии. Информацию, касающуюся TOF, можно преобразовать в пространственную информацию (посредством преобразования скорости пролета двух гамма-квантов). Обычно, информация, касающаяся TOF, будет приводить к определению местонахождения события с точностью от 10-12 см до нескольких сантиметров с использованием очень быстродействующего сканера.
По существу, желательно создание способа и средства для использования всей имеющейся информации, касающейся LOR, во время реконструкции.
Настоящее изобретение относится к усовершенствованному алгоритму реконструкции для процессов визуализации. Визуализирующая система, например РЕТ-система, объединяет одновременно моделирование функции рассеяния точки детектора и знание TOF для повышения общего качества реконструированного изображения.
В одном варианте осуществления времяпролетные данные используют для определения средней точки излучения и вероятностной функции времени пролета. Средняя точка излучения и вероятностная функция времени пролета, в свою очередь, служат для определения функции отклика детектора. Затем вероятностную функцию времени пролета и функцию отклика детектора используют для определения объема вероятностей, например, эллипсоида. Элементы трехмерного изображения в объеме вероятностей применяются в алгоритме реконструкции для данной линии срабатывания. Указанный процесс повышает общее качество реконструированного изображения без необходимости в существенном увеличении времени обработки.
На прилагаемых чертежах, которые включены в настоящее описание и являются его частью, представлены варианты осуществления изобретения, которые, в сочетании с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием, служат для пояснения принципов настоящего изобретения. Специалисту в данной области техники должно быть ясно, что упомянутые наглядные варианты осуществления не предназначены для ограничения изобретения, а просто дают примеры, содержащие принципы изобретения.
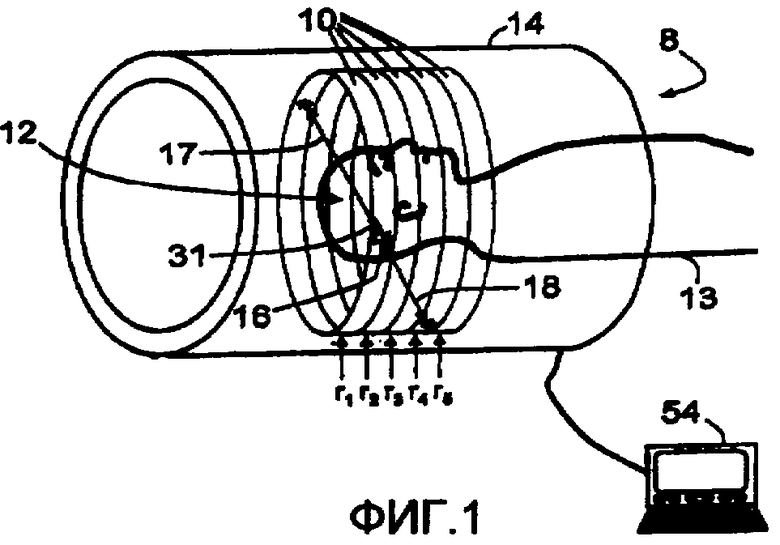
Фигура 1 - изображение визуализирующей PET-системы.
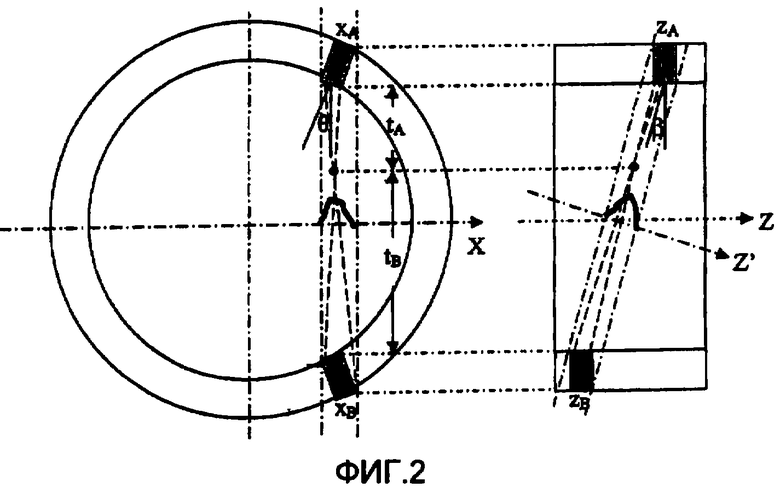
Фигура 2 - изображение модели DRF (функции отклика детектора) для трехмерного (3-мерного) кольцевого РЕТ-сканера.
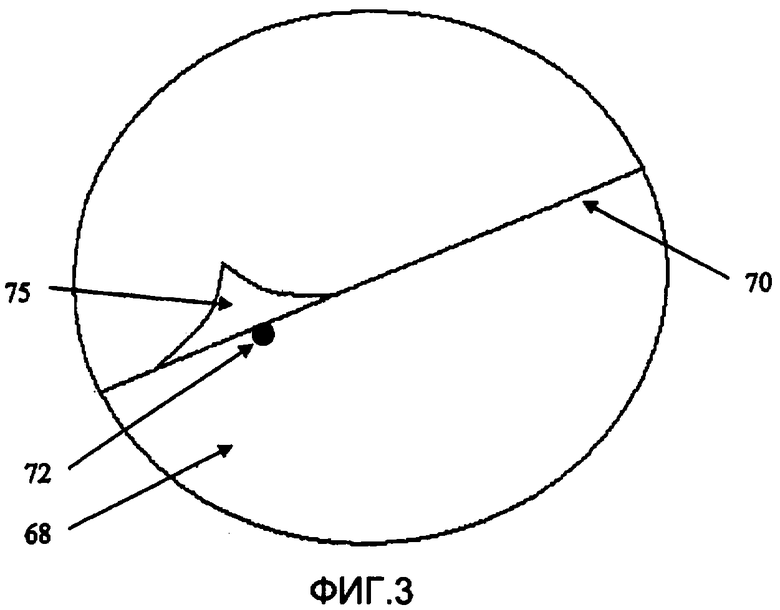
Фигура 3 - изображение данных с временной меткой, обеспечивающей среднюю точку излучения и (функцию вероятности времени пролета) probTOF.
Фигура 4 - изображение эллипсоида вероятностей для точки возникновения пары совпадающих гамма-квантов по модификации DRF, основанной на функции probTOF.
РЕТ-система, предлагаемая в настоящей заявке, обеспечивает способ и средство для точного моделирования PSF, чтобы PSF можно было использовать для обеспечения усовершенствованной реконструкции изображений в течение допустимого времени обработки. РЕТ-система моделирует PSF в сочетании с данными, собранными в режиме списка, о временах пролета (TOF) в PET. РЕТ-система фактически обеспечивает более точную модель PSF, а также ограничивает объем вычислений ограничением числа элементов трехмерного изображения, которые могут вносить вклад в точку возникновения зарегистрированных гамма-квантов.
На фигуре 1 представлена РЕТ-система 8, содержащая множество колец 10 детекторов, область 12 визуализации, объект 13, подлежащий визуализации, и консоль или корпус 14. Объект 13, подлежащий визуализации, внутри которого содержится радионуклид, испускающий позитроны, помещают в область 12 визуализации в корпусе 14. Когда позитроны испускаются из радионуклида, они сталкиваются с электронами, и при этом происходит событие 16 аннигиляции. Событие 16 аннигиляции порождает два гамма-кванта 17, 18, разлетающихся в противоположных направлениях вдоль линии 31 отклика. Затем гамма-кванты 17, 18 детектируются кольцами 10 детекторов, и сигнал передается в процессорный блок 54. РЕТ-система 8 может содержать любое число колец 10 детекторов, из которых пять (r1, r2, r3, r4, r5) показаны на фигуре 1.
Процессорный блок 54 использует информацию из детекторов 10 вместе с алгоритмами реконструкции для формирования изображения объекта. Алгоритм реконструкции включает в себя моделирование PSF для определения точки возникновения каждого зарегистрированного гамма-кванта. В двумерной PET отклик детектора является двумерной функцией Х и ε, как показано на фигуре 2, где Х является радиальной координатой линии срабатывания (LOR), и ε, которое равно tA/tB, является относительной тангенциальной координатой места излучения гамма-кванта вдоль LOR. PSF в центре поперечного поля видения имеют более узкий и центрированный профиль, чем PSF, которые находятся на периферии поперечного поля видения. PSF более или менее асимметрична относительно Х для периферических LOR. PSF является более узкой при ε=1 (точка излучения находится в середине LOR) и расширяется с уменьшением ε (точка излучения находится ближе к одному из детекторов). В этом отношении, неточное моделирование DRF создает проблемы качества изображения, которые становятся более серьезными на периферии поперечного поля видения.
Что касается трехмерной PET, PSF является четырехмерной функцией X, ε, Z' и β, как показано на фигуре 2. Как показано, Z' является осью, перпендикулярной к LOR в осевом направлении, β означает угол наклона LOR к оси, и плоскость X-Z' ортогональна к LOR.
Так как РЕТ-системы создают гамма-кванты, которые всегда разлетаются под углом 180 градусов один к другому, то для облегчения определения точки возникновения вдоль LOR можно применять времяпролетные (TOF) алгоритмы. Например, как показано на фигуре 3, поле 68 видения PET показано с LOR 70, найденной по паре совпадающих гамма-квантов. Исходя из разности времен регистрации совпадающей пары и известного диаметра поля 68 видения, можно определить среднюю точку 72 излучения вдоль LOR 70. Однако точку излучения невозможно определить абсолютно точно. Вместо этого точку излучения можно выразить в виде функции вероятности (probTOF) 75 для всех точек вдоль LOR 70. Как показано на фигуре 3, probTOF 75 напоминает функцию Гаусса с максимальной вероятностью в средней точке 72 излучения.
Данные от детекторов 10 могут подаваться в процессорный блок 54 и могут содержать временную метку для каждого зарегистрированного гамма-кванта. Временные метки могут служить для определения средней точки 72 излучения и probTOF 75. Среднюю точку 72 излучения и probTOF 75 можно использовать для более точного моделирования DRF. На фигуре 4 представлен алгоритм реконструкции, который использует среднюю точку 72 излучения и probTOF 75 для модификации DRF. Оси координат обозначены позицией 76. Регистрация совпадения дает LOR 70, и временные метки служат для определения средней точки 72 излучения и probTOF 75, при этом probTOF является функцией L. DRF 78 можно вычислить по средней точке 72 излучения, при этом DRF является функцией X, Z' при L=1. Для данной LOR 70 вносить вклад в LOR 70 могут только элементы трехмерного изображения внутри эллипсоида 80. Границы эллипсоида 80 вероятностей определяются функциями probTOF 75 и DRF 78. В частности, границы эллипсоида 80 вероятностей определяются ненулевой областью probTOF 75 в направлении LOR и ненулевой областью DRF 78 в плоскости X-Z', L=1. В альтернативном варианте объем 80 вероятностей может быть ограничен заданным участком probTOF, заданным участком DRF или заданным участком probTOF и заданным участком DRF. При изменении заданного(ных) участка(ков) изменяется форма объема вероятностей, и можно уменьшить число элементов трехмерного изображения в объеме вероятностей. Например, probTOF и/или DRF могут быть вычислены при одном или двух стандартных отклонениях от средней точки излучения.
Поскольку PSF может быть функцией относительной тангенциальной координаты ε, контур эллипсоида для каждого фиксированного L=1 может быть разным. Весовой множитель точки пересечения каждого элемента трехмерного изображения с LOR является простым произведением probTOF(L) и PFS в плоскости (X, Z', L=1). Поэтому в передней проекции, для данной LOR, все элементы трехмерного изображения в эллипсоиде 80 вероятностей должны проецироваться с весовым множителем их probTOF и DRF. В обратной проекции, для данной LOR, скорректированная LOR получает соответствующий весовой множитель и распределяется каждому элементу трехмерного изображения в пределах цилиндра для эллипсоида вероятностей. Следует отметить, что объем 80 вероятностей может иметь любую трехмерную форму, определяемую функциями probTOF и DRF, и, следовательно, предполагается, что объем настоящего изобретения не должен ограничиваться конкретной геометрической формой объема вероятностей.
Следовательно, с использованием данных TOF, полученных в режиме списка, для каждой измеренной LOR координата излучения совпадающих гамма-квантов известна и находится в пределах временного разрешения сканера. PSF моделируется для ограниченного диапазона элементов трехмерного изображения объекта вдоль LOR, исходя из средней точки 72 излучения и probTOF 75. Уменьшение объема необходимых вычислений значительно сокращает время реконструкции изображения для алгоритмов, которые точно моделируют DRP. Точное моделирование PSF допускает формирование изображений с намного более высокими разрешающей способностью и общим качеством.
Выше изобретение описано со ссылкой на, по меньшей мере, один предпочтительный вариант осуществления. Безусловно, специалистам, прочитавшим и изучившим настоящее описание, станут очевидными модификации и варианты. Например, предполагается, что настоящее изобретение не ограничено РЕТ-системами, но может включать в себя визуализирующие системы, использующие разные способы, например комбинированные системы РЕТ/СТ (компьютерной томографии) или систему PET/MR (ядерного магнитного резонанса). Предполагается охват всех подобных модификаций и изменений в той степени, насколько они находятся в пределах объема прилагаемой формулы изобретения или ее эквивалентов.
Изобретение относится к усовершенствованному алгоритму реконструкции для процессов визуализации. РЕТ-система содержит усовершенствованный алгоритм реконструкции изображения на основе усовершенствованного моделирования функции рассеяния точки. Данные о времени пролета в PET используют для получения средней точки излучения и вероятностной функции времени пролета. Затем упомянутую информацию используют для моделирования функции рассеяния точки. Вероятностная функция времени пролета и функция отклика детектора применяются для определения объема вероятностей для данной линии срабатывания, которая затем применяется при реконструкции изображения. Технический результат - повышение разрешающей способности и общего качества изображения. 3 н. и 17 з.п. ф-лы, 4 ил.
1. Визуализирующая РЕТ-система, содержащая
(a) по меньшей мере, один детектор для регистрации гамма-квантов, излучаемых из подлежащего визуализации объекта; и
(b) процессорный блок, соединенный с упомянутым, по меньшей мере, одним детектором, при этом упомянутый процессорный блок содержит
i) средство для присвоения временных меток каждому событию регистрации гамма-кванта;
ii) средство для определения совпадающих пар по упомянутым временным меткам;
iii) средство для определения средней точки излучения и вероятностной функции времени пролета для каждой совпадающей пары;
iv) средство для определения функции рассеяния точки детектора по средней точке излучения и вероятностной функции времени пролета для каждой совпадающей пары;
v) средство для определения объема вероятностей по вероятностной функции времени пролета и функции отклика детектора для каждой совпадающей пары; и
vi) средство для использования объема вероятностей для каждой совпадающей пары в алгоритме реконструкции для формирования изображения.
2. Визуализирующая РЕТ-система по п.1, в которой упомянутый объем вероятностей является эллипсоидом.
3. Визуализирующая РЕТ-система по п.1, в которой средство для использования объема вероятностей для каждой совпадающей пары в алгоритме реконструкции для формирования изображения содержит применение весового множителя точки пересечения вероятностной функции времени пролета и функции отклика детектора для каждой совпадающей пары.
4. Визуализирующая РЕТ-система по п.1, в которой объем вероятностей для каждой совпадающей пары частично ограничен ненулевой областью вероятностной функции времени пролета для каждой совпадающей пары.
5. Визуализирующая РЕТ-система по п.1, в которой объем вероятностей для каждой совпадающей пары частично ограничен ненулевой областью функции отклика детектора для каждой совпадающей пары.
6. Визуализирующая РЕТ-система по п.1, в которой объем вероятностей для каждой совпадающей пары ограничен ненулевой областью вероятностной функции времени пролета и ненулевой областью функции отклика детектора для каждой совпадающей пары.
7. Визуализирующая РЕТ-система по п.1, в которой объем вероятностей для каждой совпадающей пары ограничен заданным участком вероятностной функции времени пролета для каждой совпадающей пары.
8. Визуализирующая РЕТ-система по п.1, в которой объем вероятностей для каждой совпадающей пары ограничен заданным участком функции отклика детектора для каждой совпадающей пары.
9. Визуализирующая РЕТ-система по п.1, в которой объем вероятностей для каждой совпадающей пары ограничен заданным участком вероятностной функции времени пролета и заданным участком функции отклика детектора для каждой совпадающей пары.
10. Визуализирующая РЕТ-система по п.9, в которой, по меньшей мере, один из упомянутого заданного участка вероятностной функции времени пролета и упомянутого заданного участка функции отклика детектора для каждой совпадающей пары, приблизительно равен двум стандартным отклонениям от упомянутой средней точки излучения.
11. Визуализирующая РЕТ-система по п.1, дополнительно содержащая визуализирующую систему, использующую разные способы.
12. Способ формирования изображения в PET, содержащий следующие этапы:
(a) регистрируют излучения гамма-квантов из подлежащего визуализации объекта;
(b) присваивают временные метки каждому из упомянутых зарегистрированных гамма-квантов;
(c) определяют совпадающие пары гамма-квантов;
(d) определяют среднюю точку излучения и вероятностную функцию времени пролета для каждой совпадающей пары;
(e) определяют функцию отклика детектора на основании средней точки излучения и вероятностной функции времени пролета для каждой совпадающей пары;
(f) определяют объем вероятностей на основании вероятностной функции времени пролета и функцию отклика детектора для каждой совпадающей пары; и
(g) применяют объем вероятностей для каждой совпадающей пары в алгоритме реконструкции для формирования изображения.
13. Способ по п.12, в котором упомянутый объем вероятностей для каждой совпадающей пары является эллипсоидом.
14. Способ по п.12, в котором объем вероятностей для каждой совпадающей пары ограничен заданным участком вероятностной функции времени пролета для каждой совпадающей пары.
15. Способ по п.12, в котором объем вероятностей для каждой совпадающей пары ограничен заданным участком функции отклика детектора для каждой совпадающей пары.
16. Способ по п.12, в котором объем вероятностей для каждой совпадающей пары ограничен заданным участком вероятностной функции времени пролета и заданным участком функции отклика детектора для каждой совпадающей пары.
17. Способ по п.16, в котором, по меньшей мере, один из упомянутого заданного участка вероятностной функции времени пролета и упомянутого заданного участка функции отклика детектора для каждой совпадающей пары приблизительно равен двум стандартным отклонениям от упомянутой средней точки излучения.
18. Процессор для реконструкции изображения, содержащий
(a) средство для присвоения временных меток событию регистрации гамма-кванта;
(b) средство для определения совпадающих пар по упомянутым временным меткам;
(c) средство для определения средней точки излучения и вероятностной функции времени пролета для каждой совпадающей пары;
(d) средство для определения функции отклика детектора по средней точке излучения и вероятностной функции времени пролета для каждой совпадающей пары;
(e) средство для определения объема вероятностей по вероятностной функции времени пролета и функции отклика детектора для каждой совпадающей пары; и
(f) средство для использования объема вероятностей для каждой совпадающей пары в алгоритме реконструкции для формирования изображения.
19. Процессор для реконструкции изображения по п.18, в котором упомянутый объем вероятностей для каждой совпадающей пары является эллипсоидом.
20. Процессор для реконструкции изображения по п.18, в котором средство для использования объема вероятностей для каждой совпадающей пары в алгоритме реконструкции для формирования изображения содержит применение весового множителя точки пересечения вероятностной функции времени пролета и функции отклика детектора для каждой совпадающей пары.
| US 6803579 В2, 12.10.2004 | |||
| US 2005104001 A1, 19.05.2005 | |||
| EP 1271181 A2, 02.01.2003 | |||
| СПОСОБ СОВМЕЩЕНИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ, ПОЛУЧЕННЫХ С ПОМОЩЬЮ КОМПЬЮТЕРНЫХ ТОМОГРАФОВ, РАБОТАЮЩИХ НА ОСНОВЕ РАЗЛИЧНЫХ ФИЗИЧЕСКИХ ПРИНЦИПОВ | 1999 |
|
RU2171630C2 |

