Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству контроля датчика, прежде всего датчика транспортного средства, к способу контроля датчика, а также к датчику с устройством контроля.
Уровень техники
В транспортных средствах, например в автомобилях с электронными системами управления наполнением цилиндров двигателя (EGAS) в блоках управления двигателями должна реализовываться трехуровневая концепция. Основная идея трехуровневой концепции заключается во взаимном контроле между функциональным вычислительным устройством и отдельным контрольным модулем (сторожевое устройство). Функциональное вычислительное устройство и контрольный модуль взаимодействуют в режиме "вопрос-ответ" и имеют раздельные цепи отключения, позволяющие в случае неисправности отключать соответствующие оконечные каскады усиления мощности и тем самым обеспечивающие безопасность транспортного средства.
Первый уровень (уровень 1) означает собственно функциональное программное обеспечение, необходимое для работы двигателя. Первый уровень отрабатывается на функциональном вычислительном устройстве. На втором уровне (уровне 2), функции которого также отрабатываются на функциональном вычислительном устройстве, с помощью упрощенной по сравнению с функциональным программным обеспечением модели двигателя допустимое значение параметра, например, допустимый момент, сравнивается с фактическим значением параметра двигателя, например с фактическим крутящим моментом двигателя. Этот уровень реализуется в защищенной третьим уровнем (уровнем 3) области аппаратного обеспечения. Составной частью третьего уровня является, например, тестирование команд, контроль выполнения программ, тестирование аналогово-цифрового преобразователя, а также циклическое или полное тестирование памяти.
В существующих электронных системах управления наполнением цилиндров двигателя все функциональное и контрольное программное обеспечение находится в блоке управления. Такие системы известны, например, из публикации DE 4438714 А1. Трехуровневая концепция более экономична по сравнению с концепцией двух процессоров, часто используемой для антиблокировочных систем и электронных систем контроля боковой устойчивости автомобиля (ABS/ESP).
Из публикации DE 10331872 А1 известен способ контроля с объединенными в сеть блоками управления, причем блоки управления имеют по меньшей мере один вычислительный элемент и реализуют важные с точки зрения контроля процессы управления и контроля. Блоки управления обмениваются данными по шинной системе. Далее в этой публикации раскрыт способ, в котором коммуникационный компонент межблочного программного кадра считывает по шинной системе запросы на выдачу сигналов реакции на неисправность и функциональные параметры других устройств управления, предоставляет их модулям и компонентам программного кадра и по шинной системе снова выдает их на другие устройства управления. Однако такое распределение управляющих компонентов по устройствам управления является весьма сложным и затратным, в результате чего время реакции на обнаруженную неисправную работу может быть довольно большим.
Раскрытие изобретения
В основу изобретения положена задача обеспечения улучшенной, прежде всего более экономичной и одновременно быстрой возможности надежной выдачи сигнала реакции на неисправность при обнаружении неисправной работы датчика.
Задачу изобретения решают устройство для контроля датчика, охарактеризованное в пункте 1 формулы изобретения, датчик, прежде всего датчик транспортного средства, охарактеризованный в пункте 8, а также способ контроля датчика, охарактеризованный в пункте 9 формулы изобретения. Другие варианты осуществления изобретения описаны в зависимых пунктах формулы изобретения.
В настоящем изобретении предлагается устройство для контроля датчика, включающее в себя первый и второй модули контроля, предназначенные для контроля работы датчика на наличие неисправностей, а также третий модуль контроля, предназначенный для контроля работы второго модуля контроля. Далее предлагаемое в изобретении устройство контроля включает в себя первый блок обработки данных, включающий в себя первый модуль контроля датчика и соединяемый с датчиком или подключаемый к нему, и второй блок обработки данных, соединенный с первым блоком обработки данных или подключенный к нему, причем второй блок обработки данных выполнен с возможностью выдачи сигнала реакции на неисправность при обнаружении неисправной работы датчика.
В частных вариантах исполнения предлагаемого в изобретении устройства контроля второй блок обработки данных рассчитан на более высокую производительность, чем первый блок обработки данных. Далее первый и/или второй блок обработки данных может быть соединен с датчиком сигнальной шиной.
Второй модуль контроля предпочтительно выполнен в качестве избыточного модуля контроля, который благодаря наличию дополнительных, функционально одинаковых или сравнимых ресурсов обеспечивает правильный контроль датчика. При этом в частных вариантах осуществления изобретения модули контроля могут быть пространственно обособлены, благодаря чему снижен до минимума риск того, что они подвергнутся воздействию общей помехи. Кроме того, модули контроля могут быть различным образом рассчитаны/выполнены, чтобы избежать выхода из строя зарезервированных модулей контроля вследствие систематической ошибки. В частных вариантах осуществления изобретения это может касаться и третьего модуля контроля.
Настоящее изобретение исходит из того факта, что в настоящее время все больше подключаемых к шине датчиков используется с соответствующим интерфейсом и одновременно все энергичнее реализуется концепция "распределенных" контрольных компонентов. При этом в соответствии с изобретением используется то обстоятельство, что в этой системе часто применяются отдельные контрольные компоненты или в более общем виде компоненты обработки данных, которые в отношении их производительности (например, скорости обработки и/или емкости памяти) проектированы с очень большим запасом и поэтому предоставляют в такой системе контроля определенный цифровой резерв для датчика. Тогда такие производительные вычислительные устройства предпочтительно использовать в соответствии с изобретением в качестве второго блока обработки данных, который при обнаружении неисправной работы датчика может определять и выдавать сигнал реакции на неисправность.
В большинстве случаев для формирования, а предпочтительно - и для выдачи, такого сигнала необходима его обработка таким образом, чтобы при выдаче сигнала реакции на неисправность учитывалась бы регулировочная характеристика, требующая определенного объема цифровых вычислений. При этом сигнал реакции на неисправность может быть сигналом на перекрытие топливного бака или на выключение двигателя, что при использовании вычислительных компонентов с очень высокой производительностью позволяет обеспечить очень быструю выдачу соответствующего правильного сигнала реакции на неисправность. Если же использовать вычислительный компонент в среднем высокой производительности, то сигнал реакции на неисправность невозможно было бы формировать со скоростью, необходимой для некоторых случаев применения.
В соответствии с одним из вариантов осуществления настоящего изобретения второй и третий модули контроля могут быть расположены вместе в первом или вместе во втором блоке обработки данных. Преимущество такой схемы состоит в том, что третий модуль контроля всегда работает в том же самом блоке обработки данных, а значит, может непосредственно контролировать второй модуль контроля датчика, благодаря чему второй модуль контроля датчика имеет высокую надежность в эксплуатации. Этим, в частности, обеспечивается, что даже при "распределенной" архитектуре модулей контроля второй модуль контроля всегда правильно контролируется третьим модулем контроля.
В одном из вариантов осуществления изобретения второй и третий модули контроля расположены во втором блоке обработки данных. Это дает то преимущество, что второй и третий модули контроля датчика в любом случае работают на более производительном вычислительном компоненте, что обеспечивает эффективный и быстрый контроль датчика.
Далее второй блок обработки данных может быть соединен с первым блоком обработки данных отдельной линией передачи данных. Преимущество такого соединения состоит в том, что запрос реакции на неисправность, выдаваемый, например первым или вторым модулем контроля при неисправной работе датчика, передается на второй блок обработки данных не по шине, а предпочтительно может передаваться по прямой отдельной линии передачи данных. Это обеспечивает значительно более быструю передачу, так как исключается связанная с кодированием сигнала запроса реакции на неисправность временная задержка для его передачи по шине и выделения соответствующего кванта времени или временного окна для передачи по шине.
В другом варианте осуществления настоящего изобретения второй блок обработки данных может быть соединен с датчиком сигнальной шиной. Преимущество такого соединения состоит в том, что второй блок обработки данных также может непосредственно считывать состояние датчика (по сигнальной шине), поэтому можно не опасаться временный задержки при передаче считанных данных.
Второй блок обработки данных может быть выполнен с возможностью выдачи сигнала реакции на неисправность в ответ на обнаружение неисправной работы датчика вторым модулем контроля. Здесь преимущество в том, что выданный сигнал реакции на неисправность основывается на обнаруженной вторым модулем контроля датчика неисправной работе датчика. После того как второй модуль контроля будет подстрахован контролем со стороны третьего модуля контроля, в этом варианте осуществления изобретения станет возможной в высокой степени надежная выдача сигнала реакции на неисправность.
Кроме того, третий модуль контроля может быть выполнен с возможностью осуществления контроля аппаратных средств или контроля выполнения программы блока обработки данных, в котором расположен второй модуль контроля. Это позволяет особенно благоприятно реализовать правильную работу второго модуля контроля датчика с очень малыми затратами и/или малой сложностью, т.е. на низком схемотехническом и/или программном уровне, и таким образом надежно обнаруживать возникающие неисправности.
Объектом изобретения является также способ контроля датчика, соединенного с первым блоком обработки данных, включающий в себя следующие операции: контроль работы датчика на наличие неисправностей первым блоком обработки данных, резервный контроль работы датчика на наличие неисправностей, контроль выполнения операции резервного контроля на наличие неисправностей и выдачу сигнала реакции на неисправность вторым блоком обработки данных при обнаружении неисправной работы датчика.
При этом в предпочтительных вариантах осуществления изобретения второй блок обработки данных также выполнен более производительным, чем первый блок обработки данных. Далее предпочтительно, чтобы датчик был соединен с первым блоком обработки данных сигнальной шиной.
Краткое описание чертежей
Ниже изобретение поясняется примерами его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1-4 - структурные схемы выполнения предлагаемого в изобретении устройства,
на фиг.5 - блок-схема примера осуществления предлагаемого в изобретении способа.
Одинаковые или сходные элементы на приведенных ниже схемах могут быть снабжены одинаковыми или сходными условными обозначениями. Далее чертежи, их описание и формула изобретения содержат множество признаков в комбинации. При этом специалисту понятно, что эти признаки можно рассматривать в отдельности или объединять в другие, подробно не описываемые здесь комбинации.
Осуществление изобретения
На фиг.1 иллюстрируется пример осуществления настоящего изобретения. При этом на фиг.1 можно видеть устройство контроля 10, имеющее датчик 12, который сигнальной шиной 14 подключен или присоединен к первому блоку 16 обработки данных. В первом блоке 16 обработки данных расположен первый модуль 18 контроля, контролирующий работу датчика 12 на отсутствие сбоев. Этому первому модулю 18 соответствует модуль уровня 1 обычной системы контроля датчика.
Далее в первом блоке 16 обработки данных расположен второй модуль 20 контроля датчика, соответствующий модулю уровня 2 обычной системы контроля датчика. При этом второй модуль 20 контроля имеет доступ к данным датчика 12, по сигнальной шине 14 передаваемым на первый блок 16 обработки данных. Одновременно и второй модуль 20 контроля датчика контролирует датчик 12 на исправную работу и может в случае обнаружения неисправности в датчике 12 посредством сигнала 22 наличия неисправности передавать на второй блок 24 обработки данных соответствующий запрос о наличии неисправности.
При этом второй блок 24 обработки данных соответствует процессорному элементу, имеющему большую цифровую производительность, чем первый блок 16 обработки данных. Например второй блок 24 обработки данных представляет собой бортовое вычислительное устройство транспортного средства, если устройство контроля 10 нужно использовать для контроля датчиков транспортного средства (прежде всего датчика 12). В этом втором блоке 24 обработки данных сигнал 22 запроса реакции на неисправность в этом случае преобразуется в соответствующий сигнал 26 реакции на неисправность, который может быть выдан. При этом могут быть дополнительно учтены регулировочные характеристики, обработка которых требует большего объема цифровых вычислений.
Второй блок 24 обработки данных также может быть присоединен или подключен к первому блоку 16 обработки данных той же сигнальной шиной 14 или второй сигнальной шиной 28, чтобы обеспечить передачу данных по центральной информационной шине. Правда, для того чтобы обеспечить как можно более быструю реакцию на обнаруженный сбой в датчике 12, целесообразно передавать сигнал 22 запроса реакции на неисправность не по сигнальной шине 14, а по отдельной линии 22 передачи сигнала запроса реакции на неисправности, чтобы достигнуть высокой скорости передачи, отказавшись от кодирования шины для соответствующего сигнала.
Для стабильной работы и надежного запроса сигнала реакции на неисправность в соответствии с примером осуществления изобретения, показанным на фиг.1, работа второго модуля 20 контроля датчика контролируется третьим модулем 30 контроля датчика. При этом третий модуль 30 контроля датчика может по существу обеспечить контроль правильной работы первого блока 16 обработки данных, предпочтительно на низкой коммутационной ступени, прежде всего при тестировании аппаратного обеспечения, периодическом тестировании памяти с произвольной выборкой и постоянной памяти (RAM/ROM), контроле выполнения команд или тестировании набора команд. Благодаря этому реализованный в первом блоке 16 обработки данных второй модуль 20 контроля датчика будет с высокой вероятностью работать правильно. Третий модуль 30 контроля датчика в этой связи обеспечивает, чтобы генерированный вторым модулем 20 контроля датчика сигнал 22 запроса реакции на неисправность правильно выдавался с высокой надежностью при обнаружении неисправной работы датчика 12.
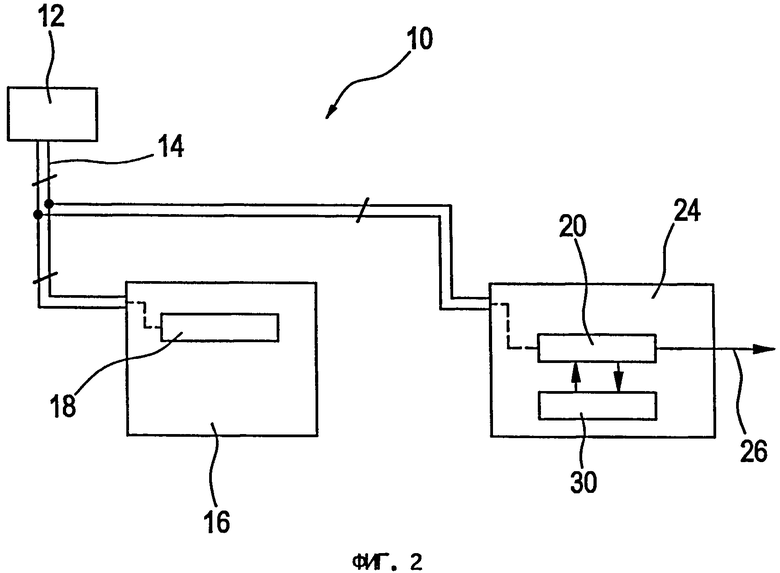
На фиг.2 в виде блок-схемы представлен второй пример осуществления настоящего изобретения. Однако в отличие от примера, приведенного на фиг.1, второй и третий модули 20 и 30 контроля датчика расположены не в первом блоке 16 обработки данных, а во втором блоке 24 обработки данных. Второй модуль 20 контроля датчика и в этом случае получает важные данные от датчика 12 по сигнальной шине 14, которая здесь непосредственно проложена ко второму блоку 24 обработки данных. Такое расположение второго и третьего модулей 20 и 30 контроля датчика имеет то преимущество, что можно использовать менее производительный первый блок 16 обработки данных, чем первый блок 16 обработки данных в первом примере осуществления изобретения. Более того, высокую производительность второго блока 24 обработки данных можно использовать, чтобы реализовать также избыточный второй модуль 20 контроля датчика, а также третий модуль 30 контроля датчика, что обеспечивает возможность простой аппаратной реализации за счет в большинстве случаев уже имеющегося цифрового резерва во втором блоке 24 обработки данных.
При этом модули контроля уровня 2 для объединенных в сеть датчиков могут быть расположены в каждом блоке управления, подключенном или присоединенном, например, посредством шины связи, к соответствующим датчикам. Так, на фиг.1 и 2 второй модуль 20 контроля датчика может быть интегрирован в первый блок 16 обработки данных (например, в блок ECU_А управления двигателем) или во второй блок 24 обработки данных (например, в блок ECU_B управления двигателем). Однако это предполагает использование в автомобилях подключаемых к шине датчиков, например датчиков концентрации водорода с последовательными сетевыми интерфейсами CAN или датчиков углового положения с последовательными периферийными интерфейсами SPI.
Сигналы реакции на неисправность, генерируемые вторыми модулями 20 контроля датчика в обоих примерах исполнения, могут исходить непосредственно от блока управления или от второго блока 24 обработки данных, в котором расположен второй модуль 20 контроля датчика. На фиг.1 запрос реакции на неисправность может быть выполнен вторым модулем 20 контроля датчика в первом блоке 16 обработки данных (например блоке управления двигателем ECU_A), тогда как этот запрос реакции на неисправность в виде сигнала реакции на неисправность в соответствии с примером исполнения, показанным на фиг.2, выполняется во втором блоке 24 обработки данных (например, блоке управления двигателем ECU_B).
Однако сигналы реакции на неисправность могут также передаваться по шине на другие устройства управления, в которых в этом случае возникает реакция на неисправность. На фиг.1 второй модуль 20 контроля датчика в первом блоке 16 обработки данных может направлять запрос реакции на неисправность по второй сигнальной шине 28 второму блоку 24 обработки данных, в котором возникает требуемая реакция на неисправность.
Должна существовать возможность передачи запросов реакции на неисправность также по дискретным каналам. На фиг.1 запрос реакции на неисправность в виде дискретного сигнала может быть отправлен по линии 22 от первого блока 16 обработки данных на второй блок 24 обработки данных, например сигнал "ВЫСОКОГО" уровня в дискретной линии 22 может указывать на нормальную работу, тогда как сигнал "НИЗКОГО" уровня свидетельствует о неисправном состоянии датчика 12. Альтернативно также широтно-модулированный сигнал с постоянными частотами может указывать на нормальное состояние датчика, а сигнал уровня (т.е. сигнал с частотой = 0 Гц) свидетельствовать о неисправном состоянии датчика.
Принимающее устройство управления, в данном случае второй блок 24 обработки данных, оценивает состояние в дискретной линии 22 и соответственно реагирует на неисправность. Соответствующие третьи модули 30 контроля датчика для соответствующих вторых модулей 20 контроля датчика должны работать в одном и том же устройстве управления, что и соответствующие вторые модули 20 контроля датчика, которые должны их контролировать. При этом к функциям третьих модулей 30 контроля датчика относятся (но не исключительно) периодическое тестирование памяти RAM/ROM, контроль отработки программ и/или тестирование набора команд.
На фиг.3 представлена блок-схема примера осуществления настоящего изобретения в автомобиле на топливных элементах. При этом структура устройства контроля соответствует структуре, показанной на фиг.2. Датчик 12 концентрации Н2 по шине CAN 14 передает данные о фактической концентрации Н2 на оба блока управления 16 и 24. Первый блок управления 16 (т.е. блок управления топливного бака) вводит значение концентрации Н2 и управляет топливными клапанами. Однако второй модуль 20 контроля датчика, т.е. избыточный модуль контроля концентрации Н2, работает не в первом устройстве управления, т.е. не в блоке управления 16, регулирующем уровень топлива в баке, а во втором устройстве управления 24, т.е. в блоке управления автомобилем. Второй модуль 20 контроля датчика может в случае неисправности отключать топливные вентили или даже главное реле.
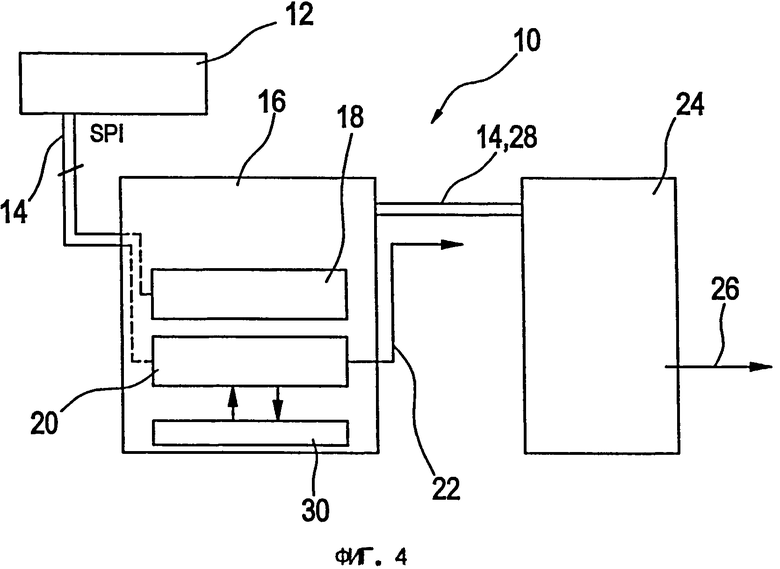
На фиг.4 показана блок-схема другого примера осуществления настоящего изобретения, соответствующего структуре, представленной на фиг.1. Здесь в качестве примера выбрана конфигурация, используемая в электромобиле. Блок 16 управления двигателем контролирует продольное ускорение автомобиля путем ввода по шине SPI 14 выданного датчиком ускорения сигнала ускорения. Если ускорение слишком велико или превышает значение, выбранное водителем и/или другими системами (например, электронной системой контроля устойчивости автомобиля ESP), по дискретной линии 22 передается запрос на отключение электродвигателя автомобиля на блок 24 управления электродвигателем, например путем переключения уровня сигнала с "ВЫСОКОГО" на "НИЗКИЙ". "ВЫСОКИЙ" означает, например, исправное состояние, а "НИЗКИЙ" означает, что электродвигатель следует отключить. Блок 24 управления электродвигателем реагирует на запрос и немедленно отключает электродвигатель (при необходимости с учетом регулировочной характеристики соответствующего двигателя) по сигналу 26 реакции на неисправность.
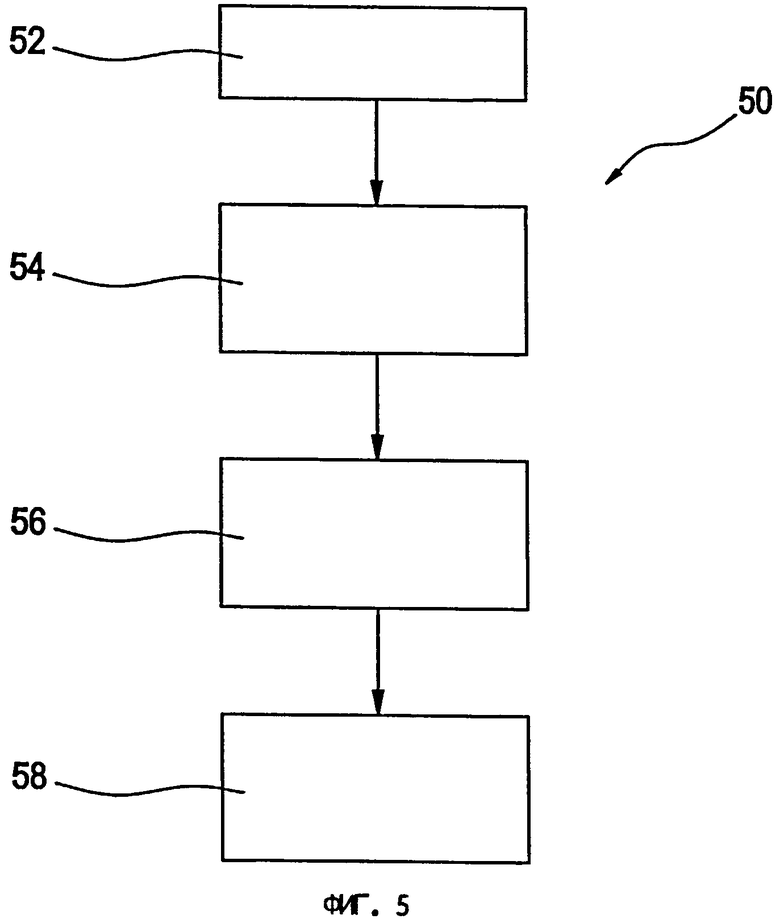
На фиг.5 показана блок-схема примера осуществления настоящего изобретения как способа 50. При этом в первой операции 52 посредством первого блока 16 обработки данных осуществляется контроль работы датчика 12 на наличие неисправностей. Одновременно или последовательно с этим, как показано на фиг.5, осуществляется контроль с избыточностью работы датчика 12 на наличие неисправностей во второй операции 54. Бесперебойное выполнение второй операции, т.е. операции контроля с избыточностью, контролируется в третьей операции 56. Наконец, в четвертой операции 58 происходит выдача сигнала 26 реакции на неисправность вторым блоком 24 обработки данных, который предпочтительно имеет более высокую производительность, чем первый блок 16 обработки данных, и подключен или присоединен к нему, если обнаружена неисправная работа датчика.
Описанное выше изобретение должно предложить подход, позволяющий осуществлять распределенный контроль компонентов и функций в системах с объединенными в сеть датчиками. Кроме того, должна быть создана возможность передачи запросов реакции на неисправность на другие устройства управления не по сигнальной шине, а по дискретным линиям.
Преимущество изобретения состоит в том, что модули контроля, прежде всего вторые и третьи модули контроля датчика, могут размещаться в каждом устройстве управления, соединенном сигнальной шиной с контролируемыми датчиками. Например, определенный контроль может осуществляться в устройстве управления с резервами вычислительной мощности. Другое преимущество изобретения заключается в том, что запросы реакций на неисправность могут быстрее передаваться по дискретным линиям. Прежде всего в электромобилях, где требуется очень быстрая реакция водителя, такое решение создает большие преимущества.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СБОРА ИНФОРМАЦИИ В СИСТЕМЕ ДАТЧИКОВ | 2016 |
|
RU2647714C1 |
| ЭЛЕКТРООБОРУДОВАНИЕ АВТОМОБИЛЯ ИЛИ АВТОПОЕЗДА ИЗ ТЯГАЧА И, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ПРИЦЕПА | 2018 |
|
RU2727630C1 |
| Интеллектуальный радиолучевой датчик для тревожной сигнализации | 2015 |
|
RU2610549C1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2017 |
|
RU2654371C1 |
| Устройство для сигнализации | 1986 |
|
SU1481824A1 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ДАТЧИКА | 2016 |
|
RU2627976C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ БЛОКАМИ НАКОПЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ДЛЯ ЭЛЕКТРИЧЕСКОГО ПИТАНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2013 |
|
RU2645178C2 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2591647C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ВОССТАНОВЛЕНИЯ ТЕХНИЧЕСКИХ СРЕДСТВ МЕДИЦИНСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2072788C1 |
| СТРУКТУРА ПАРАЛЛЕЛЬНОГО МОДУЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ | 2015 |
|
RU2701157C2 |

Заявленная группа изобретений относится к области использования в транспортных средствах, например в автомобилях с электронными системами управления наполнением цилиндров двигателя (EGAS) в блоках управления двигателями должна реализовываться трехуровневая концепция. Заявленная группа изобретений относится к устройству контроля датчика (12) транспортного средства, прежде всего автомобиля на топливных элементах, к датчику транспортного средства с устройством контроля, а также к способу контроля датчика (12), соединенного с первым блоком (16) обработки данных. Заявленное устройство для контроля датчика (12) транспортного средства, прежде всего автомобиля на топливных элементах, включающее в себя: первый модуль (18) контроля, предназначенный для контроля работы датчика (12) на наличие неисправностей, второй модуль (20) контроля, также предназначенный для контроля работы датчика (12) на наличие неисправностей, третий модуль (30) контроля, предназначенный для контроля работы второго модуля (20) контроля датчика, первый блок (16) обработки данных, включающий в себя первый модуль (18) контроля датчика и соединяемый с датчиком (12), второй блок (24) обработки данных, соединенный с первым блоком (16) обработки данных и выполненный с возможностью выдачи сигнала (26) реакции на неисправность при обнаружении неисправной работы датчика (12). Объектом изобретения является также способ контроля датчика, соединенного с первым блоком обработки данных, включающий в себя следующие операции: контроль работы датчика на наличие неисправностей первым блоком обработки данных, резервный контроль работы датчика на наличие неисправностей, контроль выполнения операции резервного контроля на наличие неисправностей и выдачу сигнала реакции на неисправность вторым блоком обработки данных при обнаружении неисправной работы датчика. Технический результат заключается в обеспечении улучшенной, более экономичной и одновременно быстрой возможности надежной выдачи сигнала реакции на неисправность при обнаружении неисправной работы датчика, а также в осуществлении распределенного контроля компонентов и функций в системах с объединенными в сеть датчиками, в возможности передачи запросов реакции на неисправность на другие устройства управления не по сигнальной шине, а по дискретным линиям. Преимущество изобретения состоит в том, что модули контроля, прежде всего вторые и третьи модули контроля датчика, могут размещаться в каждом устройстве управления, соединенном сигнальной шиной с контролируемыми датчиками. Другое преимущество изобретения заключается в том, что запросы реакций на неисправность могут быстрее передаваться по дискретным линиям. Прежде всего в электромобилях, где требуется очень быстрая реакция водителя, такое решение создает большие преимущества. 3 н. и 8 з.п. ф-лы, 5 ил.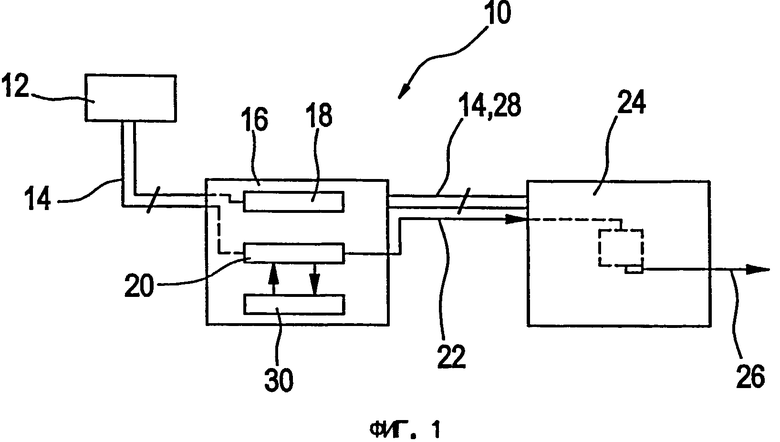
1. Устройство для контроля датчика (12) транспортного средства, прежде всего автомобиля на топливных элементах, включающее в себя:
первый модуль (18) контроля, предназначенный для контроля работы датчика (12) на наличие неисправностей,
второй модуль (20) контроля, также предназначенный для контроля работы датчика (12) на наличие неисправностей,
третий модуль (30) контроля, предназначенный для контроля работы второго модуля (20) контроля,
первый блок (16) обработки данных, включающий в себя первый модуль (18) контроля и соединяемый с датчиком (12),
второй блок (24) обработки данных, соединенный с первым блоком (16) обработки данных и выполненный с возможностью выдачи сигнала (26) реакции на неисправность при обнаружении неисправной работы датчика (12).
2. Устройство по п.1, в котором второй и третий модули (20, 30) контроля расположены вместе в первом (16) или вместе во втором (24) блоке обработки данных.
3. Устройство по п.1, в котором первый (16) и/или второй (24) блок обработки данных соединен с датчиком (12) сигнальной шиной (14).
4. Устройство по п.1, в котором второй блок (24) обработки данных соединен с первым блоком (16) обработки данных отдельной, отличной от сигнальной шины (14) линией (22) передачи данных.
5. Устройство по п.1, в котором второй блок (24) обработки данных имеет более высокую производительность, чем первый блок (16) обработки данных, и предпочтительно представляет собой бортовое вычислительное устройство транспортного средства.
6. Устройство по п.1, в котором второй блок (24) обработки данных выполнен с возможностью выдачи сигнала (26) реакции на неисправность в ответ на обнаружение неисправной работы датчика (12) вторым модулем (20) контроля.
7. Устройство по одному из пп.1-6, в котором третий модуль (30) контроля выполнен с возможностью осуществления контроля аппаратных средств или контроля выполнения программы блока (16, 24) обработки данных, в котором расположен второй модуль (20) контроля.
8. Датчик, прежде всего датчик транспортного средства, с устройством контроля по одному из пп.1-7.
9. Способ контроля датчика (12), соединенного с первым блоком (16) обработки данных, включающий в себя следующие операции:
контроль (52) работы датчика (12) на наличие неисправностей первым блоком (16) обработки данных,
резервный контроль (54) работы датчика (12) на наличие неисправностей,
контроль (56) выполнения операции резервного контроля (54) на наличие неисправностей и
выдачу (58) сигнала реакции на неисправность вторым блоком (24) обработки данных при обнаружении неисправной работы датчика (12).
10. Способ по п.9, в котором второй блок (24) обработки данных имеет более высокую производительность, чем первый блок (16) обработки данных.
11. Способ по п.9 или 10, в котором датчик (12) соединен с первым блоком (16) обработки данных сигнальной шиной (14).
| US 5927251 A, 27.07.1999 | |||
| US 7272681 B2, 18.09.2007 | |||
| US 6704630 B2, 09.03.2004 | |||
| ПОДВИЖНОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 1991 |
|
RU2134908C1 |
| US 6580974 B2, 17.06.2003. | |||

