ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ
[0001] Варианты реализации настоящего раскрытия в целом относятся к управлению питанием и, в частности, к системе и способу обеспечения усовершенствованной структуры модульного параллельного преобразователя для питания нескольких нагрузок с помощью множества параллельных модульных преобразовательных модулей.
[0002] Современные транспортные средства используют большое количество электроники, двигателей, нагревателей и другого оборудования с электрическим приводом. Электродвигатели, в частности, очень широко применяются в современных транспортных средствах, включающих в себя воздушный летательный аппарат, и подают питание на все, начиная от гидравлических насосов до вентиляторов салона или кабины. Обычно каждый из этих электродвигателей приводится в движение посредством независимого контроллера двигателя. Каждый контроллер двигателя выполнен имеющим размер, чтобы обеспечивать проведение максимального тока, необходимого для питания своего соответствующего двигателя при полной мощности в течение длительного периода времени (и, как правило, имеет некоторую дополнительную производительность для обеспечения безопасности) без перегрева или неисправности.
[0003] В результате этого, каждый воздушный летательный аппарат несет чрезмерное количество контроллеров двигателей, каждый из которых имеет слишком большие размеры и недостаточно используется большую часть времени. Иными словами, контроллер двигателя имеет достаточную производительность для обеспечения работы двигателя при полной мощности в течение длительного периода времени плюс запас на безопасность, однако двигатели редко, если вообще когда-либо, работают с полной производительностью. Это происходит потому, что сами двигатели имеют некоторый встроенный запас обеспечения безопасности, и потому, что, большую часть времени двигатели работают в режиме запроса небольших ресурсов (например, вентилятор салона или кабины не всегда включен на максимальную производительность). Кроме того, некоторые двигатели используются только время от времени или во время конкретных участков полета и не используются остальную часть времени. В результате этого, многие из используемых тяжелых и дорогих контроллеров двигателей воздушного летательного аппарата большую часть срока своей службы оказываются либо неактивными, либо работающими на уровне, значительно меньшем, чем позволяют их номинальные выходные мощности.
[0004] В связи с этим существует потребность в структуре системы, которая позволяет использовать множество модульных, выполненных с возможностью назначения и с возможностью динамического изменения конфигурации контроллеров двигателей, которые могут работать по отдельности или параллельно с другими параллельными контроллерами двигателей, чтобы отвечать требованиям управления питанием. Система должна обеспечивать возможность назначения одного или более параллельных контроллеров каждой активной электрической нагрузке в воздушном летательном аппарате, по мере необходимости, чтобы отвечать существующим требованиям к питанию. Система должна обеспечивать возможность более полного использования производительности каждого контроллера двигателя с уменьшением веса системы, ее стоимости и сложности. Именно к получению такой системы, прежде всего, относятся варианты реализации настоящего раскрытия.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] Следует отметить, что этот раздел "Раскрытие изобретения" предоставлен для общего раскрытия выборки концепций в упрощенной форме, которые описаны ниже в разделе "Осуществление изобретения". Этот раздел "Раскрытие изобретения" не предназначен для использования в целях ограничения объема заявленного объекта изобретения.
[0006] Варианты реализации настоящего раскрытия относятся к модульной системе преобразования энергии и распределения питания для электрических нагрузок. Система может включать в себя множество параллельных модульных преобразовательных модулей ("модулей"), связанных для формирования параллельного модульного преобразователя ("преобразователя"). Каждый модуль может быть использован отдельно или вместе с другими модулями для того, чтобы отвечать конкретному требованию к питанию. Модули 100 также могут быть назначены нагрузкам на основе приоритета представленных нагрузок.
[0007] Варианты реализации настоящего раскрытия могут содержать первый параллельный модульный преобразовательный модуль, содержащий логический процессор, выполненный с возможностью определения частоты и длительности первой широтно-импульсной модуляции (PWM) и выработки соответствующего первого сигнала управления, процессор (DSP) цифровой обработки сигналов контроллера двигателя, выполненный с возможностью выработки сигнала, подвергнутого широтно-импульсной модуляции PWM, на основе первого сигнала управления, драйвер управления затвором, выполненный с возможностью активирования инвертора для получения выходного сигнала переменного тока (АС) на основе сигнала, подвергнутого широтно-импульсной модуляции PWM, и шину обеспечения связи между модулями, выполненную с возможностью связи между первым параллельным модульным преобразовательным модулем и вторым параллельным модульным преобразовательным модулем.
[0008] Варианты реализации настоящего раскрытия могут также содержать параллельный модульный преобразователь, содержащий первый параллельный модульный преобразовательный модуль, выполненный с возможностью обеспечения первого выходного сигнала переменного тока (АС) и соединенный с шиной обеспечения связи между модулями, второй параллельный модульный преобразовательный модуль, выполненный с возможностью обеспечения второго выходного сигнала переменного тока АС и соединенный с шиной обеспечения связи между модулями, и ведущий логический контроллер, выполненный с возможностью назначения первой нагрузки одному или более из следующих модулей: первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль. В некоторых вариантах реализации изобретения шина обеспечения связи между модулями может соединять первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль. Система может также содержать ведущий контроллер связи, соединенный с шиной обеспечения связи между модулями и ведущим логическим контроллером для маршрутизации сообщений между ними.
[0009] Варианты реализации настоящего раскрытия могут также содержать способ обеспечения питания. В некоторых вариантах реализации изобретения способ может включать этапы, на которых соединяют первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль и ведущий логический контроллер с помощью шины обеспечения связи между параллельными модульными преобразовательными модулями, осуществляют маршрутизацию сообщения между первым параллельным модульным преобразовательным модулем, вторым параллельным модульным преобразовательным модулем и ведущим логическим контроллером с помощью ведущего контроллера связи и принимают один или более запросов нагрузки от одной или более систем воздушного летательного аппарата в ведущем логическом контроллере. В некоторых вариантах реализации изобретения способ может дополнительно включать этапы, на которых назначают указанные один или более запросов нагрузки первому параллельному модульному преобразовательному модулю, второму параллельному модульному преобразовательному модулю или им обоим с помощью ведущего логического контроллера. В некоторых вариантах реализации изобретения первый параллельный модульный преобразовательный модуль может обеспечивать первый сигнал переменного тока АС, а второй параллельный модульный преобразовательный модуль может обеспечивать второй сигнал переменного тока АС.
[00010] Варианты реализации настоящего раскрытия могут дополнительно содержать способ обеспечения питания, включающий этапы, на которых принимают запрос для первой нагрузки от внешней системы воздушного летательного аппарата в ведущем логическом контроллере, назначают первую нагрузку первому параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера, обеспечивают первый алгоритм управления двигателем для первого параллельного модульного преобразовательного модуля с помощью сети переключения управления и соединяют первый параллельный модульный преобразовательный модуль с первой нагрузкой с помощью первого переключателя сети переключения питания.
[00011] Варианты реализации настоящего раскрытия могут дополнительно содержать способ обеспечения питания, включающий этапы, на которых принимают запрос для первой нагрузки от первой внешней системы воздушного летательного аппарата в ведущем логическом контроллере, принимают запрос для второй нагрузки от второй внешней системы воздушного летательного аппарата в ведущем логическом контроллере, подсоединяют первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль параллельно с помощью сети переключения питания, назначают первую нагрузку первому параллельному модульному преобразовательному модулю и второму параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера, назначают вторую нагрузку третьему параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера, обнаруживают увеличение второй нагрузки и уменьшение первой нагрузки с помощью ведущего логического контроллера, подсоединяют второй параллельный модульный преобразовательный модуль и третий параллельный модульный преобразовательный модуль параллельно с помощью указанной сети переключения питания и снова назначают второй параллельный модульный преобразовательный модуль второй нагрузке с помощью ведущего логического контроллера.
[00012] Варианты реализации настоящего раскрытия могут также содержать систему, содержащую ведущий логический контроллер для приема первого запроса нагрузки и второго запроса нагрузки от контроллера транспортного средства, сеть переключения управления, содержащую множество алгоритмов управления и сообщающуюся с ведущим логическим контроллером, множество инверторов, сообщающихся с сетью переключения управления для преобразования одного или более входных сигналов постоянного тока (DC) в один или более выходных сигналов переменного тока АС и сеть переключения питания, содержащую множество переключателей для соединения указанного множества инверторов с одной или более электрическими нагрузками. В некоторых вариантах реализации изобретения контроллер может активировать первую группу из указанных одного или более переключателей в сети переключения питания для соединения первой группы из указанных одного или более инверторов с первой нагрузкой в ответ на первый запрос нагрузки и может активировать вторую группу из указанных одного или более переключателей в сети переключения питания для соединения второй группы из указанных одного или более инверторов со второй нагрузкой в ответ на второй запрос нагрузки.
[00013] Варианты реализации настоящего раскрытия могут также включать способ обеспечения питания, включающий этапы, на которых принимают запрос в ведущем логическом контроллере для подачи питания на первую нагрузку от первой внешней системы воздушного летательного аппарата, определяют питание, предназначенное для подачи на первую нагрузку, с помощью ведущего логического контроллера, определяют первое множество параллельных модульных преобразовательных модулей, которые необходимо активировать для подачи питания на первую нагрузку, с помощью ведущего логического контроллера, определяют множество параметров первого алгоритма управления для первого множества параллельных модульных преобразовательных модулей с помощью сети переключения управления, выдают команды в сеть переключения питания для соединения первого множества параллельных модульных преобразовательных модулей параллельно с первой нагрузкой и активируют первый алгоритм управления, выполненный с возможностью обеспечения первой нагрузки для внешней системы воздушного летательного аппарата.
[00014] Свойства, функции и преимущества, которые были описаны выше, могут быть получены независимо в различных вариантах реализации настоящего раскрытия или могут быть скомбинированы еще в одних вариантах реализации изобретения, дальнейшие подробности которых будут раскрыты со ссылкой на сопровождающее описание и фигуры чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00015] ФИГ. 1 представляет собой электрическую схему, изображающую параллельный модульный преобразовательный модуль ("модуль") для использования в параллельном модульном преобразователе для решения задач с входным сигналом постоянного тока DC высокого напряжения, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00016] ФИГ. 2 представляет собой электрическую схему, изображающую модуль для использования в параллельном модульном преобразователе для решения задач с входным сигналом переменного тока АС, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00017] ФИГ. 3А-3C представляют собой электрические схемы, изображающие параллельный модульный преобразователь ("преобразователь"), использующий множество модулей в режиме постоянного тока DC высокого напряжения, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00018] ФИГ. 4 представляет собой электрическую схему, изображающую выходную конфигурацию, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00019] ФИГ. 5 представляет собой электрическую схему, изображающую альтернативный модуль с совместно используемыми контроллерами для решения задач с входным сигналом постоянного тока DC высокого напряжения, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00020] ФИГ. 6А-6С представляют собой электрические схемы, изображающие альтернативный преобразователь для решения задач с входным сигналом постоянного тока DC высокого напряжения, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00021] ФИГ. 7 представляет собой электрическую схему, изображающую сеть переключения питания, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00022] ФИГ. 8 представляет собой электрическую схему, изображающую сеть переключения питания, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00023] ФИГ. 9А-9С представляют собой электрические схемы, изображающие альтернативный преобразователь, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00024] ФИГ. 10 представляет собой электрическую схему, изображающую общую структуру системы для преобразователя, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00025] ФИГ. 11 представляет собой подробную электрическую схему, изображающую сеть переключения управления и сеть переключения питания по ФИГ. 10, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00026] ФИГ. 12 представляет собой блок-схему, изображающую способ распределения питания, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00027] ФИГ. 13 представляет собой блок-схему, изображающую способ перераспределения нагрузок множеству модулей, в соответствии с некоторыми вариантами реализации настоящего раскрытия.
[00028] Каждая из показанных в данном документе фигур чертежей показывает вариант аспекта представленного варианта реализации изобретения и только их отличия будут описаны подробно.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[00029] Варианты реализации настоящего раскрытия относятся в целом к распределению питания и системам преобразования энергии и, более конкретно, к параллельному модульному преобразователю для распределения электрических нагрузок без необходимости использования индивидуальных контроллеров каждой электрической нагрузки. Преобразователь может использовать множество соединенных в сеть параллельных модульных преобразовательных модулей, каждый из которых имеет заданную производительность по питанию. Ведущий контроллер, сообщающийся с системами и модулями воздушного летательного аппарата, может принимать запросы от различных силовых нагрузок (например, электрических двигателей) и может назначать один или более модулей, чтобы соответствовать запрашиваемому требованию.
[00030] В целях упрощения и прояснения объяснения, настоящее раскрытие описано здесь как система распределения мощности на воздушном летательном аппарате. Специалистам в данной области техники будет понятно, однако, что настоящее изобретение этим не ограничено. Система также может быть использована, например и без ограничения, для автомобилей, других типов транспортных средств, а также в сетях распределения питания. Настоящее раскрытие может быть использовано для улучшения управления и уменьшения стоимости и затрат на распределение питания во многих ситуациях посредством сокращения количества необходимых контроллеров и исключения избыточной производительности контроллера.
[00031] Материалы и компоненты, описанные здесь и далее как составляющие различные элементы настоящего раскрытия, предназначены только для иллюстрации и не являются ограничительными. Многие подходящие материалы и компоненты, которые выполняют ту же самую или аналогичную функцию, что и материалы и компоненты, описанные в настоящем документе, предназначены для включения в объем раскрытия настоящего изобретения. Такие другие материалы и компоненты, не описанные в настоящем документе, могут включать в себя, но без ограничения, материалы и компоненты, разработанные после появления настоящего раскрытия.
[00032] Как упомянуто выше, проблема в известных системах распределения питания заключается в том, что, в целом, каждая электрическая нагрузка оснащена отдельным контроллером с целью распределения питания. К сожалению, это ведет к избыточной производительности контроллера, поскольку каждый отдельный контроллер должен иметь номинал по максимальной нагрузке, которую данное необходимое электрическое устройство может затребовать. Кроме того, в некоторых случаях, контроллеры фактически рассчитываются так, чтобы обеспечить некоторый запас с точки зрения безопасности, хотя при этом (1) сама электрическая нагрузка (например, электрический двигатель) может иметь некоторый внутренний запас безопасности, и (2) множество электрических нагрузок используют в целом при мощности меньшей, чем полная и/или используют только время от времени.
[00033] В связи с этим, варианты реализации настоящего раскрытия относятся к соединенной в сеть системе модульных контроллеров обеспечения питания, которые могут быть использованы по отдельности или параллельно, чтобы соответствовать существующим требованиям к питанию. Поскольку каждая электрическая нагрузка в воздушном летательном аппарате будет редко, если вообще когда-либо, использоваться в одно и то же время, система может быть спроектирована имеющей производительность, более приближенную к номинальному или среднему потреблению мощности (плюс некоторый запас безопасности), чем к "сценарию наихудшего случая". В результате этого, количество необходимых компонентов, вес компонентов, их размер и стоимость могут быть уменьшены, эффективность системы может быть повышена и может быть обеспечено улучшенное резервирование в системе. В случае сбоя контроллера двигателя, например, система может быть перенастроена для назначения нагрузки работающему контроллеру двигателя, повышая, таким образом, надежность. Кроме того, если указанные нагрузки таковы, что система работает с полной производительностью, все нагрузки могут продолжать получать питание, хотя и, в некоторых случаях, с пониженной производительностью.
[00034] Как показано на ФИГ. 1, компоновочный блок системы может содержать множество параллельных модульных преобразовательных модулей ("модулей") 100, которые могут быть соединены в сеть вместе с формированием параллельного модульного преобразователя ("преобразователя"), как рассмотрено ниже. В некоторых вариантах реализации изобретения, как показано на ФИГ. 1, каждый модуль 100 может содержать встроенные средства обработки. В этой конфигурации модуль 100 может содержать по меньшей мере три процессора: процессор ("DSP") 105 цифровой обработки сигналов контроллера двигателя, защитный процессор ПО и логический процессор 115. В альтернативном варианте реализации изобретения, защитный процессор 110 может быть обозначен как защитный контроллер, а логический процессор 115 может быть обозначен как логический контроллер.
[00035] Таким образом, в некоторых вариантах реализации изобретения процессор DSP 105 цифровой обработки сигналов контроллера может вырабатывать, например, высокочастотный сигнал 120 управления затвором, подвергнутый широтно-импульсной модуляции (PWM), для активирования драйвера 125 управления затвором. Драйвер 125 управления затвором действует по существу в качестве стороны переключения питания модуля 100, наподобие электрического реле. Иными словами, выход 180 модуля 100 управляется сигналом 120, подвергнутым широтно-импульсной модуляции PWM. Для определения самого сигнала 120, подвергнутого широтно-импульсной модуляции PWM, процессор DSP 105 цифровой обработки сигналов контроллера может использовать сигналы от различных датчиков через сигнальный процессор 135 и/или сигналы посредством шины 140 обеспечения связи между модулями, как рассмотрено ниже.
[00036] В некоторых вариантах реализации изобретения процессор DSP 105 цифровой обработки сигналов контроллера может использовать датчики, включающие в себя, например и без ограничения, датчики 150 температуры и датчики 155 пробоя для обнаружения условий потенциальных повреждений. В других вариантах реализации изобретения процессор DSP 105 цифровой обработки сигналов контроллера может использовать датчики, включающие в себя датчики тока (для обнаружения условий повышенного тока), датчики напряжения (для обнаружения условий повышенного напряжения), датчики скорости и положения двигателя (для обнаружения условий повышенной скорости). Кроме того, многие из этих датчиков (например, датчики тока, напряжения, скорости и положения ротора также могут быть использованы для осуществления управления двигателем). В некоторых вариантах реализации изобретения сигнальный процессор 135 может модифицировать сигналы от датчиков и может включать в себя преобразователь 135а аналогового сигнала в цифровой (ADC). В других вариантах реализации изобретения преобразователь ADC 135 аналогового сигнала в цифровой может быть отдельным блоком, который соединен через интерфейс связи с процессорами 105, 110, 115. В других вариантах реализации изобретения преобразователь ADC 135 аналогового сигнала в цифровой может быть встроен в один или более процессоров 105, 110, 115.
[00037] Данные датчиков могут содержать, например и без ограничения, входные и выходные ток и напряжение модуля, положение двигателя, элемент связи постоянного тока DM (в дифференциальном режиме) и СМ (в общем режиме), ток и напряжение, скорость двигателя и температуру модуля питания. В некоторых вариантах реализации изобретения способ широтно-импульсной модуляции PWM на основе процессора DSP 105 цифровой обработки сигналов контроллера и выходной уровень мощности могут быть сконфигурированы посредством логического процессора 115. Для обеспечения сообщения между модульными процессорами 105, 110, 115 и контроллерами, внешними по отношению к модулю 100, может быть использована шина 140 обеспечения связи между модулями. В некоторых вариантах реализации изобретения для улучшения верификации и устранения неполадок модуля 100, например, сигналы датчиков нагрузок и конфигурация процессора DSP цифровой обработки сигналов контроллера могут содержать наборы данных, предназначенные для передачи в ведущий регистратор 310 данных, как рассмотрено ниже.
[00038] Иногда для синхронизации контрольных генераторов тактовых импульсов между модулями 100 и процессором DSP 105 цифровой обработки сигналов контроллера для управления двигателем предпочтительно требуется вырабатывать синхронные выходные волновые сигналы 180. Ошибка в синхронизации контрольных генераторов тактовых импульсов может приводить к тому, что процессор DSP 105 цифровой обработки сигналов контроллера для управления двигателем будет вырабатывать волновые сигналы, не являющиеся синфазными с волновыми сигналами других модулей 100. Это, в свою очередь, может приводить к возникновению коротких замыканий, которые могут повредить или разрушить модули 100. Изменения в высокочастотном системном генераторе тактовых импульсов процессора DSP 105 цифровой обработки сигналов контроллера относительно незначительны; и при этом несколько наносекунд окажут слабое воздействие, или вообще не окажут воздействия, на выходные волновые сигналы. Контрольные генераторы тактовых импульсов предпочтительно по меньшей мере синхронизированы между параллельными модулями 100 (т.е. модулями 100, которые в этот момент подают питание на одну и ту же нагрузку). В некоторых вариантах реализации изобретения для очень точной синхронизации, могут быть использованы известные из уровня техники способы, такие как, например, синхронизация посредством оптоволоконных кабелей. Оптоволокно может быть предпочтительным, поскольку оно невосприимчиво к шуму электромагнитных помех, создаваемому переключением модуля питания.
[00039] В некоторых вариантах реализации изобретения защитный процессор 110 может обеспечивать безопасную работу модуля 100. Защитный процессор 110 может отслеживать различные датчики для условий небезопасной работы, включающие в себя, но без ограничения, выходные датчики 145 переменных тока и напряжения, температуры 150 инвертора и драйвера управления затвором и напряжения 155 пробоя. В некоторых вариантах реализации изобретения защитный процессор 110 также может отслеживать, например, повышенную скорость двигателя, повышенное напряжение (связь по постоянному току), повышенный ток на входе или выходе, повышенное напряжение на входе и выходе, ток СМ (в общем режиме), излишнюю пульсацию напряжения, несбалансированный входной/выходной ток, открытую фазу и неисправность компьютерной защиты, (например, если процессор DSP цифровой обработки сигналов контроллера неисправен, защитный процессор 110 может отключить драйвер 125 управления затвором независимо). В других вариантах реализации изобретения защитный процессор 110 также может сравнивать фактическую конфигурацию широтно-импульсной модуляции PWM с назначаемой командами конфигурацией широтно-импульсной модуляции PWM. Если эти сигналы не соответствуют, драйвер 125 управления затвором также может быть отключен. В некоторых вариантах реализации изобретения защитный процессор 110 может быть прямо соединен с драйвером 125 управления затвором, обеспечивающим возможность почти мгновенных отключений инвертора 160 при обнаружении неисправности.
[00040] Защита модуля 100 входного сигнала от ошибки также может быть обеспечена защитным процессором 110, сообщающимся с ведущим защитным контроллером 305 через шину 140 обеспечения связи между модулями. Если защитный процессор 110 обнаруживает неисправность, например, защитный процессор 110 может выдать команду на ведущий защитный контроллер 305 для внешнего отключения модуля 100. В некоторых вариантах реализации изобретения неисправности модуля 100 также могут быть записаны защитным процессором 110. В некоторых вариантах реализации изобретения неисправность может быть сохранена в запоминающем устройстве 110а (например, энергонезависимом запоминающем устройстве) защитного процессора 110, и модуль 100 может быть отключен до тех пор, пока он не будет отремонтирован или заменен. Для осуществления помощи в устранении неполадок, в некоторых вариантах реализации изобретения защитный процессор 110 может также регистрировать некоторые или все события с помощью ведущего регистратора 310 данных. Таким образом, информация, касающаяся неисправностей модуля, связи, команд ведущего логического процессора и другой необходимой информации, может содержать наборы данных для регистрации посредством ведущего регистратора 310 данных.
[00041] В некоторых вариантах реализации изобретения логический процессор 115 может регулировать процессор DSP 105 цифровой обработки сигналов контроллера посредством способа модуляции и выходной мощности. Координация между логическими процессорами 115 в параллельных модулях 100 может обеспечить равное распределение нагрузки и синхронизацию генераторов тактовых импульсов. В результате этого, каждый логический процессор 115 может сообщаться для выдачи команд с ведущим логическим контроллером 320 на предмет того, какой нагрузке он назначен для питания в настоящий момент.
[00042] Как показано, модуль 100 может принимать питание высокого напряжения постоянного тока (HVDC), которое выпрямлено посредством внешнего выпрямительного блока. В некоторых вариантах реализации изобретения входные ток и напряжение могут отслеживаться датчиками 165 тока и напряжения. Волновые сигналы постоянного тока DC могут быть отфильтрованы входным фильтром 170 электромагнитных помех (EMI) постоянного тока DC, который может уменьшать шум на шине постоянного тока DC и стабилизировать входные ток и напряжение. Инверторный модуль 160 может затем вырабатывать волновые сигналы переменного тока АС, которые могут быть отфильтрованы выходным фильтром 175 электромагнитных помех EMI переменного тока АС, для использования нагрузками системы. В некоторых вариантах реализации изобретения дополнительные фильтры и процессоры могут быть использованы для удаления коммутационных переходов и сглаживания выходных волновых сигналов. В некоторых вариантах реализации изобретения каждый модуль 100 может содержать один небольшой входной фильтр 170 электромагнитных помех EMI, например и более крупный выходной фильтр 175 электромагнитных помех EMI для каждой нагрузки (соединение фильтров электромагнитных помех EMI последовательно улучшает ослабление фильтрами).
[00043] Волновые сигналы тока и напряжения могут также отслеживаться дополнительными датчиками после выходного фильтра 145 электромагнитных помех переменного тока АС. В некоторых вариантах реализации изобретения выполнены один или более датчиков напряжения и/или тока в модуле 100 и один или более датчиков напряжения и/или тока на стороне нагрузки. Указанное может обеспечить возможность обнаружения неисправностей в сети 325 переключения питания, как рассмотрено ниже.
[00044] Как показано на ФИГ. 2, в некоторых вариантах реализации изобретения вместо использования внешнего выпрямителя, в модуль 200 может быть встроен выпрямитель 205. В этой конфигурации модуль 200 может использовать входной сигнал питания переменного тока АС, такой как трехфазный входной сигнал питания переменного тока АС. Выпрямитель 205 может содержать, например и без ограничения, активные внешние (содержащие твердотельные переключатели) или традиционные пассивные выпрямители (например, многоимпульсные автотрансформаторные выпрямительные блоки, трансформаторные выпрямительные блоки или диодные выпрямители). Эта конфигурация может обеспечивать повышенную надежность, поскольку, например, неисправность выпрямителя 205 повлияет только на один модуль 200. Кроме того, улучшаются надежность и безопасность, поскольку имеет место также уменьшение циркуляции тока между модулями 200 (т.е., поскольку каждый модуль 200 может быть изолирован от других модулей 200). Конечно, этот подход влечет незначительное увеличение стоимости, веса, объема и сложности модулей 200 как следствие использования дополнительных компонентов 205, 210. В некоторых вариантах реализации изобретения дополнительные датчики 210 тока и напряжения могут быть использованы после выпрямителя 205 для обнаружения условий неисправности.
[00045] ФИГ. 3А-3C изображают общую структуру системы 300 для преобразователя. Ведущий контроллер 302 может содержать, например и без ограничения, ведущий контроллер 315 связи, ведущий логический контроллер 320, ведущий защитный контроллер 305, ведущий регистратор 310 данных или ведущий контроллер регистрации данных и сеть 325 переключения питания (PSN). Ведущий контроллер 315 связи может соединять каждый модуль, посредством шины 140 обеспечения связи между модулями для каждого модуля 100, обеспечивая возможность обмена сообщениями между модулями 100. Кроме того, сообщения от ведущего логического контроллера 320 также могут быть отправлены по маршруту ведущим контроллером 315 связи к своим соответствующим направлениям (например, к модулям 100, внешним системам 350 воздушного летательного аппарата и т.п.).
[00046] В некоторых вариантах реализации изобретения, чтобы помочь в устранении неполадок, сообщения, обрабатываемые ведущим контроллером 315 связи, могут быть продублированы и переданы на ведущий регистратор 310 данных, где их записывают для одновременного или последующего анализа. В некоторых вариантах реализации изобретения ведущий контроллер 315 связи может облегчать сообщение между модулями 100 и внешними системами 350 воздушного летательного аппарата (например, системами 350 воздушного летательного аппарата, являющимся внешними по отношению к системам 300, запрашивающим питание). В некоторых вариантах реализации изобретения ведущий логический контроллер 320 может принимать запросы для нагрузок на заданном уровне мощности (т.е. тока и/или напряжения) от внешних систем самолета. Ведущий логический контроллер 320 может затем выделять модули 100, чтобы выполнять запросы на питание посредством выбора и конфигурирования модулей 100 и сети 325 переключения питания соответственно.
[00047] Для обеспечения обнаружения и прерывания любых условий неисправности, возникающих в системе 300, ведущий защитный контроллер 305 может отслеживать входные сигналы и выходные сигналы для каждого модуля 100, включающие в себя, например и без ограничения, входные волновые сигналы тока и напряжения шины постоянного тока DC высокого напряжения и шины постоянного тока DC низкого напряжения. В некоторых вариантах реализации изобретения, если возникает неисправность, ведущий защитный контроллер 305 может подать сигнал на соответствующий переключатель 330 питания для отсоединения модуля 100, записи неисправности в запоминающее устройство 305а ведущего защитного контроллера, и может послать сообщение о неисправности в ведущий регистратор 310 данных. Ведущий защитный контроллер 305 может отключить модуль 100 до тех пор, пока он не будет, например, отремонтирован или заменен.
[00048] Регистрация сообщений управления и показания датчиков, с другой стороны, может быть выполнена ведущим регистратором 310 данных. Ведущий регистратор 310 данных может записывать данные, которые он принимает, на носитель 335 для хранения данных посредством шины 345 регистрации данных, которая может иметь связь через интерфейс (DSI) 310а хранения данных. В некоторых вариантах реализации изобретения, как например, когда высокочастотные показания датчиков должны быть записаны в хранилище данных, могут быть использованы высокоскоростные устройства хранения высокой производительности. В некоторых вариантах реализации изобретения надежность системы 300 может быть улучшена с использованием избыточных соединений низкого напряжения постоянного тока DC с ведущими контроллерами (например, ведущим защитным контроллером 305, ведущим регистратором 310 данных, ведущим контроллером 315 связи и ведущим логическим контроллером 320) и процессорами модуля 100 (например, процессором DSP 105 цифровой обработки сигналов контроллера для управления двигателем, защитным процессором 110 и логическим процессором 115).
[00049] В этой конфигурации модули 100 могут получать питание через выпрямительные блоки (выпрямители) 340, внешние по отношению к модулям 100. Каждый выпрямитель 340 может подавать питание на N (любое количество) модулей 100. Конечно, уменьшение количества, N, модулей, запитываемых каждым выпрямителем 340, может повысить надежность за счет повышения веса и сложности. В результате этого, если выполнено, например, М выпрямителей 340, это приведет к общему количеству N*M модулей 100. Как раскрыто выше, выпрямитель 340 может быть, например и без ограничения, выпрямителями на основе аналоговых внешних интерфейсных аппаратных средств AFE, пассивных диодов или многоимпульсных автотрансформаторных блоков.
[00050] В некоторых вариантах реализации изобретения, как показано на ФИГ. 4, выходная система 400 может включать в себя сеть 325 переключения питания. Сеть 325 переключения питания может переключать совокупность входов модуля 100 (от 415-1 до 415-N) на назначенные им нагрузки посредством совокупности соединений (от 420-1 до 420-К) нагрузки. Идентификация неисправности нагрузки и ее прерывание могут быть обеспечены посредством отслеживания волновых сигналов тока и напряжения посредством защитного контроллера 405 сети переключения питания. Если защитный контроллер 405 сети переключения питания обнаруживает условия неисправности, он может разомкнуть некоторые или все из переключателей 410 сети 325 переключения питания, соединенные с нагрузкой. В некоторых вариантах реализации изобретения защитный контроллер 405 сети переключения питания также может записывать неисправность в энергонезависимое запоминающее устройство NVM, чтобы способствовать либо повторному замыканию переключателя 410 (т.е. после устранения неисправности), либо постоянному отсоединению переключателя 410 (например, до тех пор, пока он не будет заменен). Защитный контроллер 405 сети переключения питания также может информировать сеть 325 переключения питания об этой неисправности. Сеть 325 переключения питания может затем открыть все переключатели, соединенные с нагрузкой, обеспечивая таким образом резервирование защиты системы. В некоторых вариантах реализации изобретения выход системы 300 может включать в себя конечную стадию ослабления электромагнитных помех EMI, если это необходимо. Каждая нагрузка может иметь один или более назначенных выходных фильтров электромагнитных помех EMI переменного тока АС, которые могут фильтровать комбинированные волновые сигналы от всех параллельных модулей 100. В некоторых вариантах реализации изобретения переключатели 410 могут являться, например и без ограничения, твердотельными переключателями или электромеханическими контакторами.
[00051] В некоторых вариантах реализации изобретения, как показано на ФИГ. 5, вместо множества контроллеров модуля (например, процессора DSP 105 цифровой обработки сигналов контроллера для управления двигателем, защитного процессора 110 и логического процессора 115), модули 100 могут в первую очередь управляться процессором DSP 105 цифровой обработки сигналов контроллера для управления двигателем. В этой конфигурации передача функций логического процессора 115 ведущему логическому контроллеру 320 может уменьшить количество процессоров, запрашиваемых модулем 100. В некоторых вариантах реализации изобретения это также может исключить, например, процесс согласования для распределения питания между логическим процессором 115 каждого модуля. В этой конфигурации процессор DSP 105 цифровой обработки сигналов контроллера для управления двигателем может быть сконфигурирован ведущим логическим контроллером 320. Сигналы датчиков нагрузок могут быть переданы ведущим логическим контроллером 320 в процессор DSP 105 цифровой обработки сигналов контроллера для управления двигателем, как это требуется. Кроме того, синхронизация системы 300 на основе контрольных генераторов тактовых импульсов для выработки синхронных волновых сигналов может быть обеспечена процессором DSP 105 цифровой обработки сигналов контроллера для управления двигателем.
[00052] В этой конфигурации функции защитного процессора 110 могут быть встроены в средства синхронизации на основе контрольных генераторов тактовых импульсов для выработки синхронных волновых сигналов. В некоторых случаях, обработка этого относительно небольшого количества дополнительных сигналов не добавляет значительной нагрузки на процессор DSP 105 цифровой обработки сигналов контроллера для управления двигателем. Если процессор DSP 105 цифровой обработки сигналов контроллера для управления двигателем идентифицирует условия неисправности, процессор DSP 105 цифровой обработки сигналов контроллера для управления двигателем может отключить модуль 100 просто путем прекращения подачи сигнала 120, подвергнутого широтно-импульсной модуляции PWM.
[00053] В некоторых вариантах реализации изобретения, чтобы уменьшить требования к пропускной способности шины 140 обеспечения связи между модулями, модули 100 могут также содержать отдельную шину 505 связи для регистрации данных. Таким образом, связь с относительно высокой пропускной способностью для регистрации данных может обеспечиваться шиной 505 связи для регистрации данных, и при этом связь 510 управления, имеющая относительно низкую пропускную способность при высокой надежности связи, может оставаться на шине 140 обеспечения связи между модулями. Таким образом, процессор DSP 105 цифровой обработки сигналов контроллера для управления двигателем может быть соединен с обеими шинами 505, 510 связи с обеспечением обоих типов связи.
[00054] В других вариантах реализации изобретения, как показано на ФИГ. 6А-6С, система 600 может содержать более сложные ведущие логические контроллеры 320 и ведущие регистраторы 310 данных, обеспечивающие возможность устранения ведущего контроллера 315 связи. В этой конфигурации ведущий логический контроллер 320 может быть соединен с каждой шиной логической связи модуля, чтобы обеспечить возможность передачи конфигураций в модули 100. Распределение питания между параллельными модулями 100 и связь с внешними системами 605 воздушного летательного аппарата (т.е. системами, внешними по отношению к системе 600 воздушного летательного аппарата, а не воздушному летательному аппарату) могут управляться ведущим логическим контроллером 320. Ведущий регистратор 310 данных может быть соединен с шиной 505 связи для регистрации данных каждого модуля, обеспечивающей более высокую частоту регистрации данных. В некоторых вариантах реализации изобретения дополнительные соединения могут быть выполнены с ведущим защитным контроллером 305 и/или ведущим логическим контроллером 320 для сохранения данных, а ведущий защитный контроллер 305 может работать по существу, как описано выше.
[00055] В некоторых вариантах реализации изобретения, как показано на ФИГ. 7, система 700 может содержать средства обработки сигналов датчиков нагрузок, которые были перемещены из отдельных модулей 100 на выход системы 300. В этой конфигурации защитный контроллер 405 сети переключения питания может отслеживать сигналы нагрузок для обеспечения уверенности в отсутствии возникновения неисправностей (например, условий повышенной температуры или повышенной скорости). Защитный контроллер 405 сети переключения питания может передавать данные датчиков, включающие в себя, но без ограничения, температуру 705 нагрузки и положение 710 нагрузки, в ведущий логический контроллер 320 для распределения к модулям 100.
[00056] ФИГ. 8 изображает альтернативную структуру модуля 800, которая исключает проблемы контрольной синхронизации (т.е. синхронизации контрольных генераторов тактовых импульсов между модулями 100, как описано выше). В некоторых вариантах реализации изобретения указанное может быть получено посредством переноса процессора DSP 105 цифровой обработки сигналов контроллера двигателя в ведущий контроллер 302. Как упомянуто выше, процессор DSP 105 цифровой обработки сигналов контроллера двигателя вычисляет состояния широтно-импульсной модуляции PWM и затем их передает (например, посредством сообщений о состоянии переключателей по оптоволокну) в модуль 800. Оптоволокно может быть использовано для связи между модулями, например, для предотвращения повреждения данных на неэкранированных электрических проводах. В этой конфигурации оптоволоконный приемопередатчик 805 может принимать сообщения о состоянии переключателей.
[00057] Декодер 805а внутри оптоволоконного приемопередатчика 805 может также вырабатывать аналоговый сигнал 810 управления затвором для драйвера 815 управления затвором. Оптоволоконный приемопередатчик 805 может передавать, принимать, кодировать и декодировать сигналы из электрической области в оптическую и наоборот. Оптоволоконные сигналы также могут обеспечивать преимущество, поскольку оптические сигналы являются невосприимчивыми к шуму электромагнитных помех, создаваемому сетью переключения питания. Следовательно, оптические носители могут быть полезными, чтобы передавать информацию на относительно большие расстояния (например, между модулями 100).
[00058] Декодер 805а может являться логической схемой такой как, например и без ограничения, программируемая вентильная матрица (FPGA), комплексное программируемое логическое устройство (CPLD), специализированная интегральная схема (ASIC) или процессор. Защитный процессор 110 может обеспечить базовую защиту посредством отслеживания датчиков 812, 817 тока и напряжения для входного сигнала постоянного тока DC и выходного сигнала переменного тока АС, соответственно, и, помимо прочего, температуры модульных устройств 820 и пробоя 825 инвертора. Если возникает неисправность, защитный процессор 110 может отключить инвертор 830 и информировать ведущий защитный контроллер 305 об этой неисправности. В некоторых вариантах реализации изобретения защитный процессор 110 может сообщаться с ведущим защитным контроллером 305 посредством оптоволоконного приемопередатчика 805. В других вариантах реализации изобретения защитный процессор 110 может сообщаться с ведущим защитным контроллером 305 посредством шины 140 обеспечения связи между модулями. В некоторых вариантах реализации изобретения сообщения о состоянии переключателей и сообщения о защите могут быть переданы на различных частотах для обеспечения возможности одновременной связи.
[00059] Еще в одних вариантах реализации изобретения, как показано на ФИГ. 9А-9С, процессоры DSP 105 цифровой обработки сигналов контроллера двигателя могут быть перемещены из модуля 100 в ведущий контроллер 302. Посредством объединения процессоров DSP 105 цифровой обработки сигналов контроллера двигателя упрощается синхронизация генераторов тактовых импульсов благодаря непосредственной близости устройств (т.е. большая часть элемента временной задержки устранена из синхронизации). В некоторых вариантах реализации изобретения процессоры DSP 105 цифровой обработки сигналов контроллера двигателя могут быть заменены вспомогательной модульной платой, позволяющей упростить ремонт системы 900. Количество процессоров DSP 105 цифровой обработки сигналов контроллера двигателя может быть равным максимальному количеству одновременных нагрузок, К, подлежащих управлению посредством системы 900. В этой конфигурации каждый процессор DSP 105 цифровой обработки сигналов контроллера двигателя может вычислять состояние широтно-импульсной модуляции PWM, а затем передавать сообщение о состоянии переключателя в модули 100, при этом параллельные модули 100 принимают сообщения о состоянии переключателей от одних и тех же процессоров DSP 105 цифровой обработки сигналов контроллера двигателя. В некоторых вариантах реализации изобретения маршрутизатор 905 с широтно-импульсной модуляцией PWM может быть использован для маршрутизации указанных сообщений о состоянии переключателей к параллельным модулям 100. Датчик сигналов, такой как, например, напряжения и токов нагрузки, может иметь маршрутизацию к соответствующим процессорам DSP 105 цифровой обработки сигналов контроллера двигателя посредством маршрутизатора 910 датчиков нагрузки.
[00060] В некоторых вариантах реализации изобретения ведущий логический контроллер 320 может сообщаться непосредственно с каждыми процессорами DSP 105 цифровой обработки сигналов контроллера двигателя для конфигурирования необходимых переменных управления (например, ширины и амплитуды импульса). В некоторых вариантах реализации изобретения, раскрытых выше, оптоволоконные приемопередатчики 805 могут быть использованы для связи с модулями 100. Множество волновых сигналов/частот также может быть использовано для обеспечения одновременной передачи и/или приема сообщений о состоянии переключателей и сообщений о неисправности модуля.
[00061] Структура, описанная выше, может обеспечить высокую надежность, поскольку каждый контроллер модуля 100 работает почти независимо. В некоторых случаях, взаимодействие с другими контроллерами ограничено назначением распределения питания между логическими процессорами 115 различных модулей 100 и распределением нагрузки и питания ведущим логическим контроллером 320. В этой конфигурации, например, неисправность модуля 100 не повлияет на работу других модулей 100. Кроме того, сообщение облегчается тем, что шина 140 обеспечения связи между модулями обеспечивает сопряжение между различными модульными процессорами (например, процессором DSP 105 цифровой обработки сигналов контроллера, защитным процессором 110 и логическим процессором 115) и ведущими контроллерами. Однако эта структура может быть несколько менее эффективна с точки зрения затрат и более сложна в реализации. Использование назначенного логического контроллера для минимального количества задач, например, может приводить к неиспользованию мощности для обработки, что приводит к увеличению стоимости модулей. Встраивание функций логического контроллера в другие контроллеры, такие как ведущий логический контроллер 320, с другой стороны, будет понижать стоимость и сложность модулей. Реализация синхронизированных контрольных генераторов тактовых импульсов может приводить к увеличению стоимости и сложности модулей.
[00062] Общая структура системы, включающая в себя подсистемы, описанные на ФИГ. 1-9С, показана на ФИГ. 10 и 11, система 1000 может управлять системой параллельных модульных инверторов 1015 для обеспечения привода множества и/или различных типов машин 1010 переменного АС или постоянного DC тока. Система 1000 может содержать множество параллельных модульных инверторов 1015, соединенных параллельно, каждый из которых выполнен с возможностью настройки для приема любого множества алгоритмов 1022а, 1022b, 1022с управления, встроенных в систему 1020 управления, через выполненную с возможностью перенастройки сеть 1025 переключения управления. Каждый из параллельных модульных инверторов 1015 может быть выполнен с возможностью обеспечения привода одной или более из указанного множества машин 1010 переменного тока АС на стороне нагрузки через выполненную с возможностью перенастройки сеть 1030 переключения питания.
[00063] Эта конфигурация обеспечивает возможность, например, динамической перенастройки как сети 1025 переключения управления, так и сети 1030 переключения питания. Кроме того, любой из инверторов из указанного множества параллельных инверторов 1015 выполнен доступным, чтобы приводить в действие любой двигатель из указанного множества двигателей 1010 (или других электрических нагрузок) на стороне нагрузки, и любой алгоритм управления из множества алгоритмов 1022 управления, встроенных в систему 1000 выполнен доступным, чтобы управлять любым инвертором из указанного множества инверторов 1015. В результате этого, один или более инверторов 1015 могут приводит в действие один двигатель 1010 по мере необходимости, чтобы соответствовать требованиям к нагрузке, и/или множество двигателей 1010 на стороне нагрузки может быть приведено в действие в одно и то же время, каждый из которых может быть приведен в действие с помощью одного или более инверторов 1015. Кроме того, множество двигателей 1010 на стороне нагрузки может быть приведено в действие в одно и то же время с помощью одного и того же алгоритма управления (например, 1020а) или другого алгоритма управления (например, 1020b).
[00064] Как показано на ФИГ. 10, система может содержать системный контроллер 1035, выполненный с возможностью связи с контроллером 1040 транспортного средства, чтобы, например, получать рабочие команды от контроллера 1040 транспортного средства и обеспечивать, помимо прочего, подачу сигналов о состоянии системы 1000 на контроллер 1040 транспортного средства. В некоторых вариантах реализации изобретения системный контроллер 1035 также может изменять конфигурацию сети 1030 переключения питания для обеспечения соответствующего количества параллельных инверторных модулей 1015 для обеспечения привода двигателя 1010 в режиме реального времени. Иными словами, когда нагрузка двигателя 1010 повышена, системный контроллер 1035 может подать сигнал в сеть 1030 переключения питания, чтобы подсоединить большее количество инверторных модулей 1015 параллельно. И наоборот, конечно, когда нагрузка двигателя понижена, системный контроллер 1035 может подать сигнал в сеть 1030 переключения питания, чтобы отсоединить один или более инверторных модулей 1015. При необходимости, системный контроллер 1035 может затем подсоединить их параллельно с другими инверторными модулями 1015 для обеспечения приведения в действие других нагрузок 1010.
[00065] В некоторых вариантах реализации изобретения системный контроллер 1035 также может изменять конфигурацию сети 1025 переключения управления для обеспечения соответствующих алгоритмов 1022 управления двигателем для одного или более инверторных модулей 1015, осуществляющих приведение в действие одного или более типов двигателя. Системный контроллер 1035 может обеспечивать алгоритмы относящиеся, например и без ограничения, к векторному управлению с ориентацией поля (field oriented control, FOC), прямому управлению вращательным моментом (direct torque control, DTC), вольт-частотному (V/F) управлению. Это может быть полезным, например, для эффективного приведения в действие конкретных типов двигателей (например, асинхронных двигателей, синхронных двигателей, синхронных двигателей на основе постоянных магнитов, бесщеточных двигателей постоянного тока DC и т.п.).
[00066] В некоторых вариантах реализации изобретения системный контроллер 1035 также может передавать, например и без ограничения, скорость двигателя, крутящий момент или опорные значения мощности на соответствующие двигатели 1010 (или контроллеры двигателя). В некоторых вариантах реализации изобретения системный контроллер 1035 может быть сохранен и запущен на встроенном контроллере. Системный контроллер 1035 может содержать, например и без ограничения процессор микроконтроллера, программируемую вентильную матрицу FPGA или специализированную интегральную схему ASIC. В некоторых вариантах реализации изобретения системный контроллер 1035 может использовать симулятор/эмулятор режима реального времени или может быть запущен в режиме реального времени.
[00067] В некоторых вариантах реализации изобретения количество алгоритмов 1022 контроллера двигателя может быть определено количеством различных нагрузок двигателя. Если система 1000 имеет три различных типа двигателей 1010 для обеспечения привода, например, тогда могут быть разработаны три алгоритма 1022 контроллера двигателя, при этом каждый алгоритм 1022 управления двигателем соответствует нагрузке двигателя. Конечно, если все три двигателя 1010 выполняют одну и ту же функцию с помощью одного и того же двигателя, возможно, что все три нагрузки могут получать питание с использованием одного и того же алгоритма 1022.
[00068] Сеть 1025 переключения управления может динамически настраивать один или более инверторов 1015, каждый из которых может приводиться в действие посредством конкретного алгоритма 1022 управления или общего алгоритма 1022 управления, который подвергнут маршрутизации через сеть 1025 переключения управления в расчете на команды от системного контроллера 1035. В некоторых вариантах реализации изобретения временная задержка между сигналами в сеть 1025 и из сети 1025 переключения управления может быть минимизирована для улучшения производительности привода двигателя.
[00069] Сеть 1025 переключения управления может быть реализована, например, в виде программного обеспечения или аппаратных средств. В некоторых вариантах реализации изобретения сеть 1025 переключения управления, выполненная на основе кодов программного обеспечения, может быть запущена, например и без ограничения, на встроенном контроллере, симуляторе режима реального времени или компьютере. В других вариантах реализации изобретения сеть 1025 переключения управления может быть реализована с использованием аппаратного устройства, такого как, например и без ограничения, комплексные программируемые логические устройства CPLD, специализированные интегральные схемы ASIC или программируемые вентильные матрицы FPGA.
[00070] В некоторых вариантах реализации изобретения сеть 1030 переключения питания может динамически настраивать один или более инверторов для обеспечения привода одного или более двигателей на один или более конкретных алгоритмов управления от системного контроллера 1035. В некоторых вариантах реализации изобретения сеть 1030 переключения питания может действовать в качестве короткозамкнутого контура и/или устройства защиты от повышенного тока. В этом случае, переключатели 1030а питания, связанные с коротким замыканием или нагрузкой повышенного тока, размыкаются при обнаружении неисправности.
[00071] Сеть 1030 переключения питания может быть реализована с использованием, например и без ограничения, твердотельных реле, механических реле, транзисторов и других выполненных с возможностью управления переключателей питания. Конечно, инверторы 1015 преобразуют питание постоянного тока DC в запрашиваемое питание переменного тока АС (например, при различных уровнях напряжения, частотах, волновых сигналах и т.п.) для обеспечения привода различных машин переменного тока АС (например, двигателей 1010 переменного тока АС) с использованием соответствующего алгоритма 1022 двигателя и системного контроллера 1035. Инверторы могут содержать, например и без ограничения, биполярные транзисторы с изолированным затвором (IGBT), металл-оксид-полупроводниковые полевые транзисторы (MOSFET) и биполярные распределительные транзисторы (BJT).
[00072] В других вариантах реализации изобретения система 1000 может назначать нагрузки на основе коэффициента приоритета нагрузок. Иными словами, если, например, количество нагрузок, запрашиваемых внешними системами 1040 воздушного летательного аппарата (т.е. внешних по отношению к системе 1000), больше, чем может быть обеспечено модулем 100, система 1000 может назначать нагрузки посредством коэффициента приоритета нагрузок, при этом питание для нагрузок с более высоким приоритетом подают раньше, чем нагрузкам с меньшим приоритетом. Если воздушный летательный аппарат 1040 делает запрос на большую нагрузку, такую как выпуск шасси, например, система 1000 может временно переназначить некоторые или все из модулей 1015 для питания шасси двигателей. Когда шасси выпущено вниз и зафиксировано, в свою очередь, система 1000 может переназначить модули 1015 своим предыдущим нагрузкам (или существующим на данный момент нагрузкам). Так, например, вентилятор салона или кабины может быть временно отключен в пользу шасси и затем снова запущен после выпуска шасси.
[00073] В некоторых вариантах реализации изобретения, как например, при наличии излишнего количества нагрузок с меньшим приоритетом, которые вместе превосходят номинальную мощность системы 1000, система 1000 может подавать питание на некоторые или все нагрузки с уменьшенными настройками. Таким образом, все нагрузки получают питание, но могут работать с меньшей скоростью или производительностью. Так, например, вентиляторы салона или кабины воздушного летательного аппарата, освещение и развлекательная система могут в одно и то же время запросить питание, превосходящее номинальное значение системы 1000. В результате этого, система 1000 может, например, обеспечивать подачу всего питания для развлекательной системы, но немного уменьшить скорость вентилятора салона или кабины и интенсивность освещения для уменьшения общего требования к питанию.
[00074] Как показано на ФИГ. 12, варианты реализации настоящего раскрытия могут также содержать способ 1200 распределения питания. В некоторых вариантах реализации изобретения способ 1200 может включать этапы, на которых принимают 1205 запрос нагрузки от транспортного средства (например, запросы нагрузки от контроллера 1040 транспортного средства). Контроллер может затем определить 1210, является ли запрашиваемая нагрузка выше или ниже номинальной мощности для одного модуля. Если запрос нагрузки ниже номинального значения для одного модуля, контроллер может назначать 1220а указанную нагрузку одному модулю. Если, с другой стороны, нагрузка, большей той, питание которой может обеспечить один модуль, контроллер может подсоединять параллельно 1215 некоторое количество модулей ("X") вместе, которые требуются для питания указанной нагрузки и затем назначить 1220b эту нагрузку X модулей. Контроллер может затем активировать 1225 модули, обеспечивая необходимую нагрузку.
[00075] Когда транспортное средство больше не нуждается в подаче энергии (например, шасси выпущено вниз), транспортное средство может выдать запрос 1230 на отсоединение нагрузки, и контроллер может отсоединить 1235 модуль или модули. В некоторых вариантах реализации изобретения система также может постоянно или периодически проверять 1240 текущие требования системы и переназначать модули по мере необходимости.
- Пример 1 -
[00076] В одном примере, каждый модуль 100 может иметь номинальное значение в 10А. С десятью модулями 100 в преобразователе 300, следовательно, преобразователь может обеспечивать 100А. Если воздушный летательный аппарат требует нагрузку в 25А для питания гидравлических двигателей шасси, например, система 300 может определить, что для этой нагрузки требуется по меньшей мере три модуля 100, подсоединить три модуля 100 параллельно и затем назначить и активировать эти три модуля 100 для нагрузки. Если, во время работы шасси, например, требования по нагрузке для питания меняются - например, затребованная нагрузка для запуска двигателей больше, чем постоянная нагрузка для поддержания работы двигателей - система 300 может удалять (или добавлять) модули 100 по мере изменения нагрузки.
[00077] Схожим образом, как показано на ФИГ. 13, варианты реализации настоящего раскрытия также могут включать способ 1300 распределения питания для множества нагрузок. В некоторых вариантах реализации изобретения способ 1300 может включать этапы, на которых принимают 1305 по меньшей мере два запроса нагрузки от транспортного средства. Контроллер может затем определить 1310, являются ли запросы нагрузки выше или ниже номинальной мощности для одного модуля. Если запросы нагрузки ниже номинального значения для одного модуля, контроллер может назначать 1320b каждую нагрузку одному модулю. Если, с другой стороны, одна нагрузка (или обе нагрузки) больше, чем может быть запитано одним модулем, контроллер может подсоединять параллельно 1315а, 1315с два или более модулей вместе и затем назначить 1320а, 1320с нагрузки параллельным модулям, как это требуется. Система может затем активировать 1325 модули. В некоторых вариантах реализации изобретения система также может постоянно или периодически проверять 1340 текущие требования системы и переназначать 1320 модули, как это требуется. Когда транспортное средство больше не нуждается в подаче энергии для одной или двух нагрузок, транспортное средство может выдать запрос 1330 на отсоединение нагрузок, и контроллер может отсоединить 1335 модуль, или модули для этой нагрузки.
- Пример 2 -
[00078] Еще в одном примере, как раскрыто выше, каждый модуль 100 может снова иметь номинальное значение 10А и десять модулей 100 в преобразователе 300 для обеспечения общей производительности в 100А. Если воздушный летательный аппарат требует первую нагрузку, 15А, для питания гидравлических двигателей шасси, например, и вторую нагрузку, 7,5А, для включения вентилятора салона или кабины на низкой скорости, система 300 может определить, что для этой нагрузки требуется по меньшей мере три модуля 100. Система 300 может подсоединить первый модуль 100 и второй модуль 100 параллельно. Система 300 может затем назначать первую нагрузку первому модулю 100 и второму модулю 100 и вторую нагрузку третьему модулю 100.
[00079] Система 300 может снова постоянно или с перерывами проверять, изменились ли требования транспортного средства к питанию 1340. Если во время работы шасси, например, требования к питанию меняются, например необходимое питание для пуска двигателей больше, чем постоянная нагрузка для поддержания работы двигателей, и/или транспортное средство требует, чтобы вентилятор салона или кабины работал на высокой скорости, система 300 может рассоединять 1315с первый и второй модули, пару второго и третьего модулей и назначать 1320с первую нагрузку (шасси) первому модулю 100 и вторую нагрузку (вентилятор салона или кабины) второму и третьему модулям 100 по мере изменения нагрузки.
Кроме того, изобретение включает варианты реализации в соответствии со следующими пунктами:
Пункт 1. Первый параллельный модульный преобразовательный модуль, содержащий: логический процессор, выполненный с возможностью определения частоты и длительности первой широтно-импульсной модуляции (PWM) и выработки соответствующего первого сигнала управления; процессор (DSP) цифровой обработки сигналов контроллера двигателя, выполненный с возможностью выработки сигнала, подвергнутого широтно-импульсной модуляции PWM, на основе первого сигнала управления; драйвер управления затвором, выполненный с возможностью активирования инвертора для получения выходного сигнала переменного тока (АС) на основе сигнала, подвергнутого широтно-импульсной модуляции PWM; и шину обеспечения связи между модулями, выполненную с возможностью связи между первым параллельным модульным преобразовательным модулем и вторым параллельным модульным преобразовательным модулем.
Пункт 2. Модуль по пункту 1, также содержащий фильтр электромагнитных помех (EMI) для удаления шума из выходного сигнала переменного тока АС.
Пункт 3. Модуль по пункту 1, также содержащий: защитный процессор, выполненный с возможностью отслеживания одного или более входных сигналов первого параллельного модульного преобразовательного модуля и одного или более выходных сигналов первого параллельного модульного преобразовательного модуля, причем защитный процессор отключает первый параллельный модульный преобразовательный модуль при обнаружении неисправности.
Пункт 4. Модуль по пункту 3, в котором защитный процессор сообщается с драйвером управления затвором, чтобы отключать первый параллельный модульный преобразовательный модуль при обнаружении неисправности.
Пункт 5. Модуль по пункту 3, в котором защитный процессор содержит один или более датчиков температуры, отслеживающих один или более из следующих параметров: температура драйвера управления затвором, температура инвертора и выходная температура переменного тока АС, причем неисправность обнаружена, если один или более из следующих параметров: температура драйвера управления затвором, температура инвертора и выходная температура переменного тока АС - выше заданной температуры.
Пункт 6. Модуль по пункту 3, в котором защитный процессор содержит один или более датчиков пробоя для обнаружения тока пробоя на одном или более выводах первого параллельного модульного преобразовательного модуля, причем неисправность обнаружена, если ток пробоя на одном или более выводах первого параллельного модульного преобразовательного модуля выше заданного тока.
Пункт 7. Параллельный модульный преобразователь, содержащий: первый параллельный модульный преобразовательный модуль, выполненный с возможностью обеспечения первого выходного сигнала переменного тока (АС) и соединенный с шиной обеспечения связи между модулями; второй параллельный модульный преобразовательный модуль, выполненный с возможностью обеспечения второго выходного сигнала переменного тока АС и соединенный с шиной обеспечения связи между модулями; ведущий логический контроллер, выполненный с возможностью назначения первой нагрузки одному или более из следующих модулей: первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль; причем шина обеспечения связи между модулями соединяет первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль; и ведущий контроллер связи, соединенный с шиной обеспечения связи между модулями и ведущим логическим контроллером для маршрутизации сообщений между ними.
Пункт 8. Параллельный модульный преобразователь по пункту 7, в котором ведущий логический контроллер назначает первую нагрузку первому параллельному модульному преобразовательному модулю и вторую нагрузку второму параллельному модульному преобразовательному модулю.
Пункт 9. Параллельный модульный преобразователь по пункту 7, в котором ведущий логический контроллер подсоединяет первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль параллельно с использованием сети переключения питания и назначает первую нагрузку первому параллельному модульному преобразовательному модулю и второму параллельному модульному преобразовательному модулю.
Пункт 10. Параллельный модульный преобразователь по пункту 7, также содержащий: третий параллельный модульный преобразовательный модуль, выполненный с возможностью обеспечения третьего выходного сигнала переменного тока АС и соединенный с шиной обеспечения связи между модулями, причем ведущий логический контроллер подсоединяет первый параллельный модульный преобразовательный модуль, второй параллельный модульный преобразовательный модуль и третий параллельный модульный преобразовательный модуль параллельно с использованием сети переключения питания и назначает первую нагрузку первому параллельному модульному преобразовательному модулю, второму параллельному модульному преобразовательному модулю и третьему параллельному модульному преобразовательному модулю.
Пункт 11. Параллельный модульный преобразователь по пункту 7, также содержащий: ведущий защитный контроллер, выполненный с возможностью отслеживания одного или более входных сигналов и выходных сигналов первого параллельного модульного преобразовательного модуля и одного или более входных сигналов и выходных сигналов второго параллельного модульного преобразовательного модуля, причем защитный контроллер отключает первый параллельный модульный преобразовательный модуль, второй параллельный модульный преобразовательный модуль или как первый параллельный модульный преобразовательный модуль, так и второй параллельный модульный преобразовательный модуль при обнаружении неисправности.
Пункт 12. Параллельный модульный преобразователь по пункту 11, в котором один или более входных сигналов первого параллельного модульного преобразовательного модуля и один или более входных сигналов второго параллельного модульного преобразовательного модуля содержат одно или более из входного напряжения и входного тока.
Пункт 13. Параллельный модульный преобразователь по пункту 11, в котором один или более выходных сигналов первого параллельного модульного преобразовательного модуля и один или более выходных сигналов второго параллельного модульного преобразовательного модуля содержат одно или более из выходного напряжения и выходного тока.
Пункт 14. Параллельный модульный преобразователь по пункту 7, также содержащий: ведущий регистратор данных для регистрации одного или более наборов данных; и носитель для хранения данных, выполненный с возможностью хранения указанных одного или более наборов данных.
Пункт 15. Параллельный модульный преобразователь по пункту 14, в котором указанные один или более наборов данных содержат одно или более из следующего: команды ведущего логического контроллера, сообщения ведущего контроллера связи, сообщения о неисправности и показания датчиков.
Пункт 16. Параллельный модульный преобразователь по пункту 14, также содержащий: шину регистрации данных, соединяющую ведущий регистратор данных и носитель для хранения данных, причем сообщение с передачей регистрации данных реализовано посредством шины регистрации данных, а сообщение с передачей сигналов управления реализовано посредством шины обеспечения связи между модулями.
Пункт 17. Способ обеспечения питания, включающий этапы, на которых: соединяют первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль, и ведущий логический контроллер с помощью шины обеспечения связи между параллельными модульными преобразовательными модулями; осуществляют маршрутизацию сообщения между первым параллельным модульным преобразовательным модулем, вторым параллельным модульным преобразовательным модулем, и ведущим логическим контроллером с помощью ведущего контроллера связи; принимают один или более запросов нагрузки от одной или более систем воздушного летательного аппарата в ведущем логическом контроллере и назначают указанные один или более запросов нагрузки первому параллельному модульному преобразовательному модулю, второму параллельному модульному преобразовательному модулю или им обоим с помощью ведущего логического контроллера, причем первый параллельный модульный преобразовательный модуль обеспечивает первый сигнал переменного тока (АС) и второй параллельный модульный преобразовательный модуль обеспечивает второй сигнал переменного тока АС.
Пункт 18. Способ по пункту 17, также включающий этапы, на которых: принимают первый запрос нагрузки от первой системы воздушного летательного аппарата в ведущем логическом контроллере; подсоединяют первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль параллельно с помощью сети переключения питания; и назначают первый запрос нагрузки первому параллельному модульному преобразовательному модулю и второму параллельному модульному преобразовательному модулю.
Пункт 19. Способ по пункту 17, также включающий этапы, на которых: принимают первый запрос нагрузки в ведущем логическом контроллере от первой системы воздушного летательного аппарата; подсоединяют первый параллельный модульный преобразовательный модуль, второй параллельный модульный преобразовательный модуль и третий параллельный модульный преобразовательный модуль параллельно с помощью сети переключения питания; и назначают первый запрос нагрузки первому параллельному модульному преобразовательному модулю, второму параллельному модульному преобразовательному модулю и третьему параллельному модульному преобразовательному модулю, причем третий параллельный модульный преобразовательный модуль обеспечивает третий выходной сигнал переменного тока АС.
Пункт 20. Способ по пункту 17, также включающий этапы, на которых: принимают первый запрос нагрузки от указанных одной или более систем воздушного летательного аппарата в ведущем логическом контроллере; подсоединяют первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль параллельно с помощью сети переключения питания; назначают первый запрос нагрузки первому параллельному модульному преобразовательному модулю и второму параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера; обнаруживают неисправность в первом параллельном модульном преобразовательном модуле с помощью ведущего защитного параллельного модульного преобразовательного модуля; подсоединяют второй параллельный модульный преобразовательный модуль и третий параллельный модульный преобразовательный модуль параллельно с помощью сети переключения питания; назначают первый запрос нагрузки второму параллельному модульному преобразовательному модулю и третьему параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера; и отключают первый параллельный модульный преобразовательный модуль с помощью ведущего защитного контроллера.
Пункт 21. Способ по пункту 17, также включающий этапы, на которых: принимают первый запрос нагрузки и второй запрос нагрузки от указанных одной или более систем воздушного летательного аппарата в ведущем логическом контроллере; и назначают первый запрос нагрузки первому параллельному модульному преобразовательному модулю и второй запрос нагрузки второму параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера.
Пункт 22. Способ обеспечения питания, включающий этапы, на которых: принимают запрос для первой нагрузки от внешней системы воздушного летательного аппарата в ведущем логическом контроллере; назначают первую нагрузку первому параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера; обеспечивают первый алгоритм управления двигателем для первого параллельного модульного преобразовательного модуля с помощью сети переключения управления; и соединяют первый параллельный модульный преобразовательный модуль с первой нагрузкой с помощью первого переключателя сети переключения питания.
Пункт 23. Способ по пункту 22, также включающий этапы, на которых: подсоединяют первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль параллельно с помощью сети переключения питания; и назначают первую нагрузку первому параллельному модульному преобразовательному модулю и второму параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера.
Пункт 24. Способ по пункту 22, также включающий этапы, на которых: принимают запрос для второй нагрузки от внешней системы воздушного летательного аппарата в ведущем логическом контроллере; назначают вторую нагрузку второму параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера; обеспечивают второй алгоритм управления двигателем для второго параллельного модульного преобразовательного модуля с помощью сети переключения управления; и соединяют второй параллельный модульный преобразовательный модуль со второй нагрузкой с помощью второго переключателя сети переключения питания.
Пункт 25. Способ по пункту 24, при котором первый алгоритм управления двигателем, второй алгоритм управления двигателем или первый и второй алгоритмы управления двигателем содержат алгоритм векторного управления с ориентацией поля (field oriented control, FOC).
Пункт 26. Способ по пункту 24, при котором первый алгоритм управления, второй алгоритм управления или первый и второй алгоритмы управления двигателем содержат алгоритм прямого управления вращательным моментом (direct torque control, DTC).
Пункт 27. Способ по пункту 24, при котором первый алгоритм управления, второй алгоритм управления или первый и второй алгоритмы управления двигателем содержат вольт-частотный (V/F) алгоритм.
Пункт 28. Способ обеспечения питания, включающий этапы, на которых: принимают запрос для первой нагрузки от первой внешней системы воздушного летательного аппарата в ведущем логическом контроллере; принимают запрос для второй нагрузки от второй внешней системы воздушного летательного аппарата в ведущем логическом контроллере; подсоединяют первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль параллельно с помощью сети переключения питания; назначают первую нагрузку первому параллельному модульному преобразовательному модулю и второму параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера; назначают вторую нагрузку третьему параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера; обнаруживают уменьшение второй нагрузки и увеличение первой нагрузки с помощью ведущего логического контроллера; подсоединяют второй параллельный модульный преобразовательный модуль и третий параллельный модульный преобразовательный модуль параллельно с помощью сети переключения питания; и снова назначают второй параллельный модульный преобразовательный модуль с второй нагрузкой с помощью ведущего логического контроллера.
Пункт 29. Способ по пункту 28, дополнительно включающий этапы, на которых: принимают запрос для отсоединения первой нагрузки в ведущем логическом контроллере; и отсоединяют первый параллельный модульный преобразовательный модуль от первой нагрузки с помощью указанной сети переключения питания.
Пункт 30. Способ по пункту 28, дополнительно включающий этапы, на которых: принимают запрос для отсоединения второй нагрузки в ведущем логическом контроллере; и отсоединяют второй параллельный модульный преобразовательный модуль и третий параллельный модульный преобразовательный модуль от второй нагрузки с помощью указанной сети переключения питания.
Пункт 31. Способ по пункту 28, при котором запрос для первой нагрузки и второй нагрузки содержит тип первой нагрузки и тип второй нагрузки, причем назначение первой нагрузки также включает назначение первого алгоритма управления с помощью сети переключения управления, а назначение второй нагрузки также включает назначение второго алгоритма управления с помощью сети переключения управления.
Пункт 32. Система, содержащая: ведущий логический контроллер для приема первого запроса нагрузки и второго запроса нагрузки от контроллера транспортного средства; сеть переключения управления, содержащая множество алгоритмов управления и сообщающаяся с ведущим логическим контроллером; множество инверторов, сообщающихся с сетью переключения управления для преобразования одного или более входных сигналов постоянного тока (DC) в один или более выходных сигналов переменного тока (АС); и сеть переключения питания, содержащая множество переключателей для соединения указанного множества инверторов с одной или более электрическими нагрузками, причем контроллер активирует первую группу из указанных одного или более переключателей в сети переключения питания для соединения первой группы из указанных одного или более инверторов с первой нагрузкой в ответ на первый запрос нагрузки, а контроллер активирует вторую группу из указанных одного или более переключателей в сети переключения питания для соединения второй группы из указанных одного или более инверторов со второй нагрузкой в ответ на второй запрос нагрузки.
Пункт 33. Система по пункту 32, в которой сеть переключения управления назначает первый алгоритм управления первой группе из указанных одного или более инверторов и второй алгоритм управления второй группе из указанных одного или более инверторов.
Пункт 34. Способ обеспечения питания, включающий этапы, на которых: принимают запрос в ведущем логическом контроллере для подачи питания на первую нагрузку от первой внешней системы воздушного летательного аппарата; определяют питание, предназначенное для подачи на первую нагрузку, с помощью ведущего логического контроллера; определяют первое множество параллельных модульных преобразовательных модулей, подлежащих активированию для подачи питания на первую нагрузку, с помощью ведущего логического контроллера; определяют множество параметров первого алгоритма управления для первого множества параллельных модульных преобразовательных модулей с помощью сети переключения управления; выдают команды в сеть переключения питания для соединения первого множества параллельных модульных преобразовательных модулей параллельно с первой нагрузкой; и активируют первый алгоритм управления, выполненный с возможностью обеспечения первой нагрузки для внешней системы воздушного летательного аппарата.
Пункт 35. Способ по пункту 34, дополнительно включающий этапы, на которых: отслеживают температуры первого множества параллельных модульных преобразовательных модулей с помощью одного или более датчиков температуры; и удаляют первый алгоритм управления из первого параллельного модульного преобразовательного модуля первого множества параллельных модульных преобразовательных модулей и применяют его для второго параллельного модульного преобразовательного модуля, если температура первого параллельного модульного преобразовательного модуля превосходит заданное значение.
Пункт 36. Способ по пункту 34, дополнительно включающий этапы, на которых: принимают запрос в ведущем логическом контроллере для питания второй нагрузки от второй внешней системы воздушного летательного аппарата; определяют питание, предназначенное для подачи на вторую нагрузку, с помощью ведущего логического контроллера; определяют второе множество параллельных модульных преобразовательных модулей, подлежащих активированию для питания второй нагрузки, с помощью ведущего логического контроллера; определяют множество параметров второго алгоритма управления с помощью сети переключения управления; выдают команды в сеть переключения питания для соединения второго множества параллельных модульных преобразовательных модулей параллельно со второй нагрузкой; и активируют второй алгоритм управления, выполненный с возможностью обеспечения второй нагрузки для второй внешней системы воздушного летательного аппарата.
Хотя несколько возможных вариантов реализации настоящего изобретения раскрыты выше, варианты реализации настоящего раскрытия не ограничены ими. Например, хотя несколько возможных вариантов конфигурации были раскрыты для параллельного модульного преобразователя, компоненты, другие подходящие конфигурации и компоненты могут быть выбраны без отхода от сущности настоящего изобретения. Кроме того, расположение и конфигурация, используемые для различных особенностей вариантов реализации настоящего раскрытия, такие как, например, количество модулей, тип используемой электроники и т.п., могут быть изменены согласно нуждам конкретного воздушного летательного аппарата или применения, которое требует небольшого изменения вследствие, например, размера или конструкции воздушного летательного аппарата или ограничений по весу и мощности. Такие изменения следует считать находящимися в границах объема настоящего раскрытия.
Конкретные конфигурации, выбор материалов и размер и форма различных элементов могут быть различными согласно конкретным конструктивным спецификациям или ограничениям, требуемым устройством, системой или способом, выполненными согласно принципам настоящего раскрытия. Такие изменения следует считать находящимися в границах настоящего раскрытия. Раскрытые в настоящем документе варианты реализации, таким образом, рассматриваются во всех отношениях как иллюстративные, а не ограничительные. Объем раскрытия указан в прилагаемой формуле изобретения, а не в предшествующем описании, и все изменения, которые подходят по смыслу и диапазону значений и их эквивалентов, следует считать находящимися в границах объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЛАНСИРОВКА ТОКА В СИСТЕМЕ МОДУЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ | 2016 |
|
RU2724468C2 |
| ВЫРАВНИВАНИЕ ТОКОВ В СИСТЕМЕ ПАРАЛЛЕЛЬНЫХ МОДУЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2017 |
|
RU2735355C2 |
| СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ И ФУНКЦИОНИРОВАНИЯ АРХИТЕКТУРЫ ПАРАЛЛЕЛЬНЫХ УСТРОЙСТВ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2015 |
|
RU2675419C2 |
| ЗВЕНО СВЯЗИ МНОГОКРИСТАЛЬНОЙ ИНТЕГРАЛЬНОЙ СХЕМЫ | 2013 |
|
RU2656732C2 |
| ЭНЕРГОРАСПРЕДЕЛИТЕЛЬНАЯ СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ЭНЕРГОРАСПРЕДЕЛЕНИЕМ В МОДУЛЬНОЙ СИСТЕМЕ ПРЕОБРАЗОВАТЕЛЕЙ С ИСПОЛЬЗОВАНИЕМ РЕЗУЛЬТАТОВ РАСЧЕТА КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ (ВАРИАНТЫ) | 2017 |
|
RU2743297C2 |
| СПОСОБ И СИСТЕМА БЕСПРОВОДНОГО УПРАВЛЕНИЯ ПЕРЕКЛЮЧАЮЩИМИ УСТРОЙСТВАМИ СЕТИ ЭЛЕКТРОПИТАНИЯ | 2009 |
|
RU2510124C2 |
| МОДУЛЬ МАРШЕВОГО ДВИГАТЕЛЯ С ЭЛЕКТРОДВИГАТЕЛЕМ ДЛЯ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА САМОЛЕТНОГО ТИПА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (VTOL) | 2024 |
|
RU2834328C1 |
| РАДИОТЕЛЕФОННАЯ СИСТЕМА ДЛЯ ГРУПП УДАЛЕННЫХ АБОНЕНТОВ | 2004 |
|
RU2341038C2 |
| МОДУЛЬ МАРШЕВОГО ДВИГАТЕЛЯ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ ДЛЯ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА САМОЛЕТНОГО ТИПА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (VTOL) | 2024 |
|
RU2834329C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБЕСПЕЧЕНИЯ УЛУЧШЕННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ В БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2427982C2 |





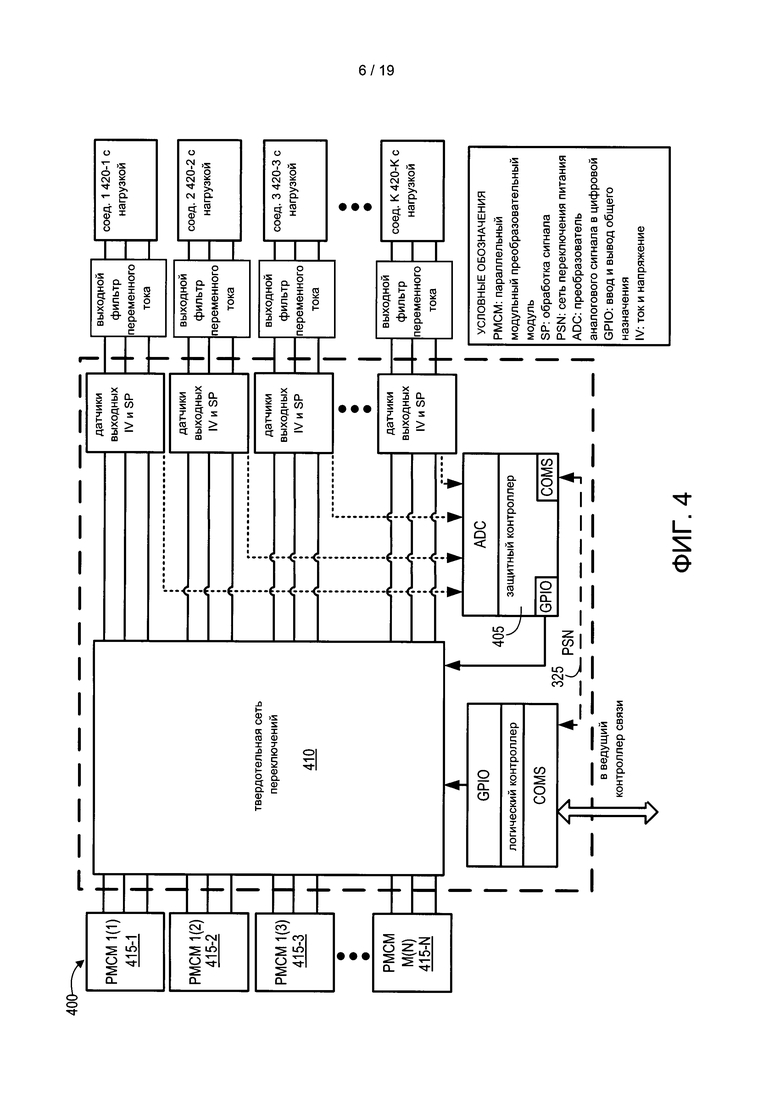

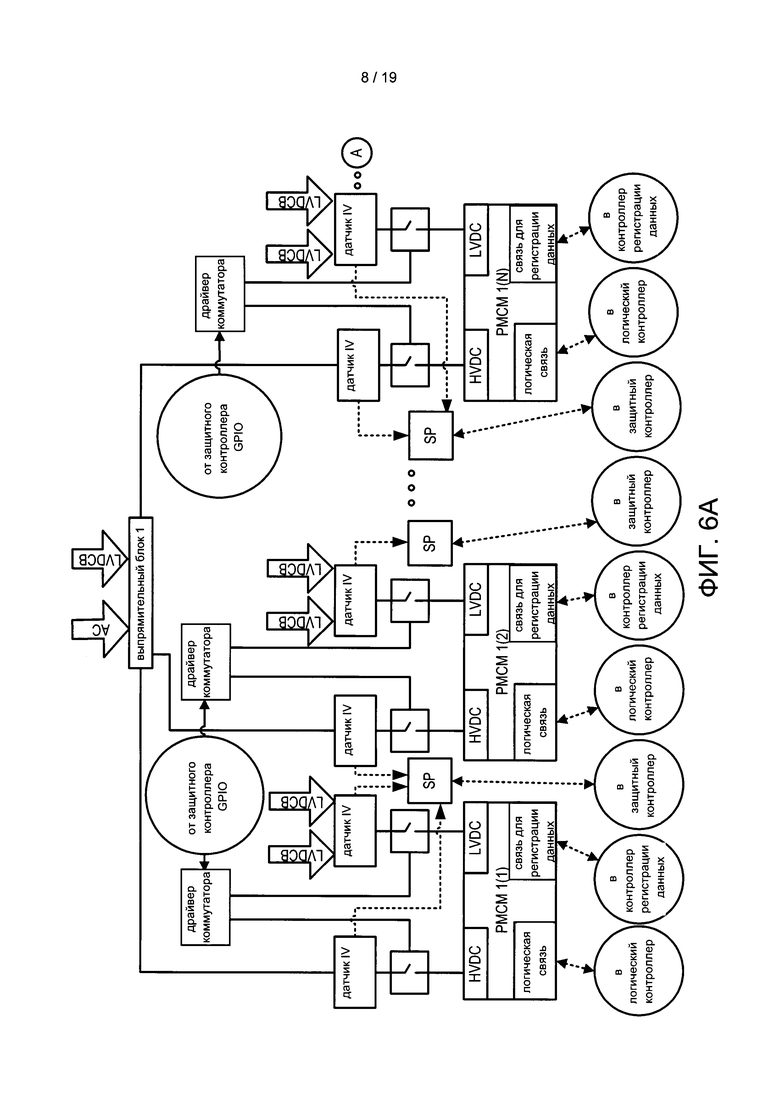


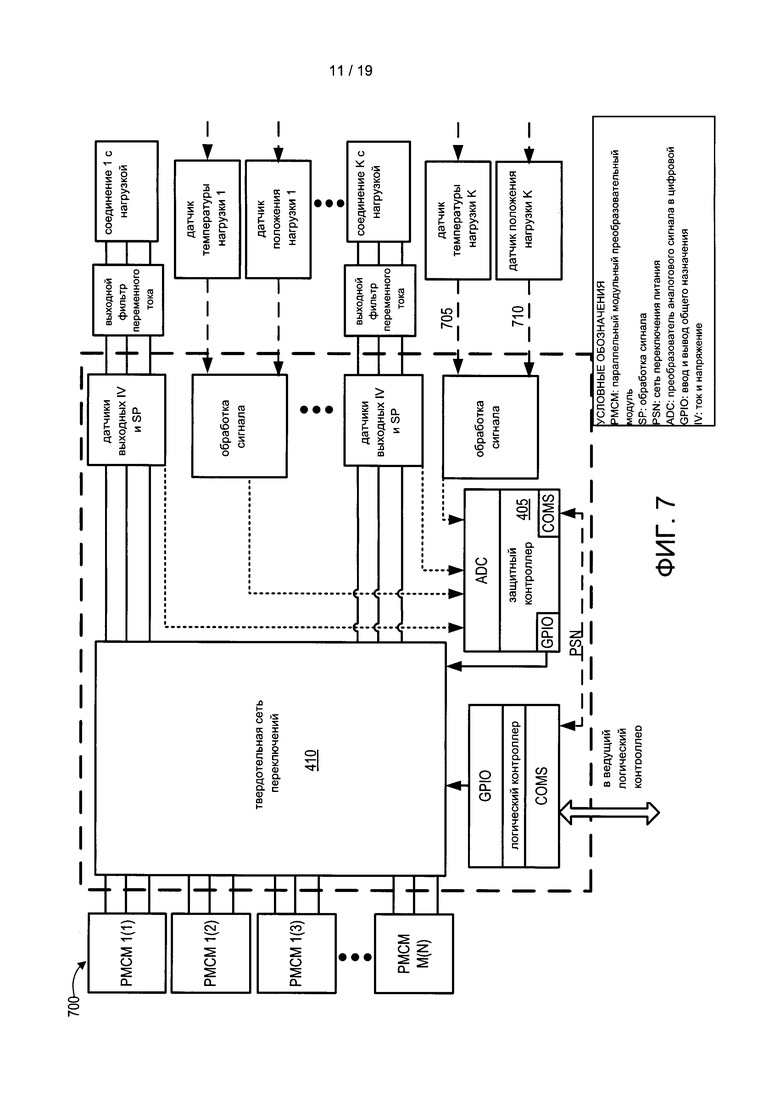



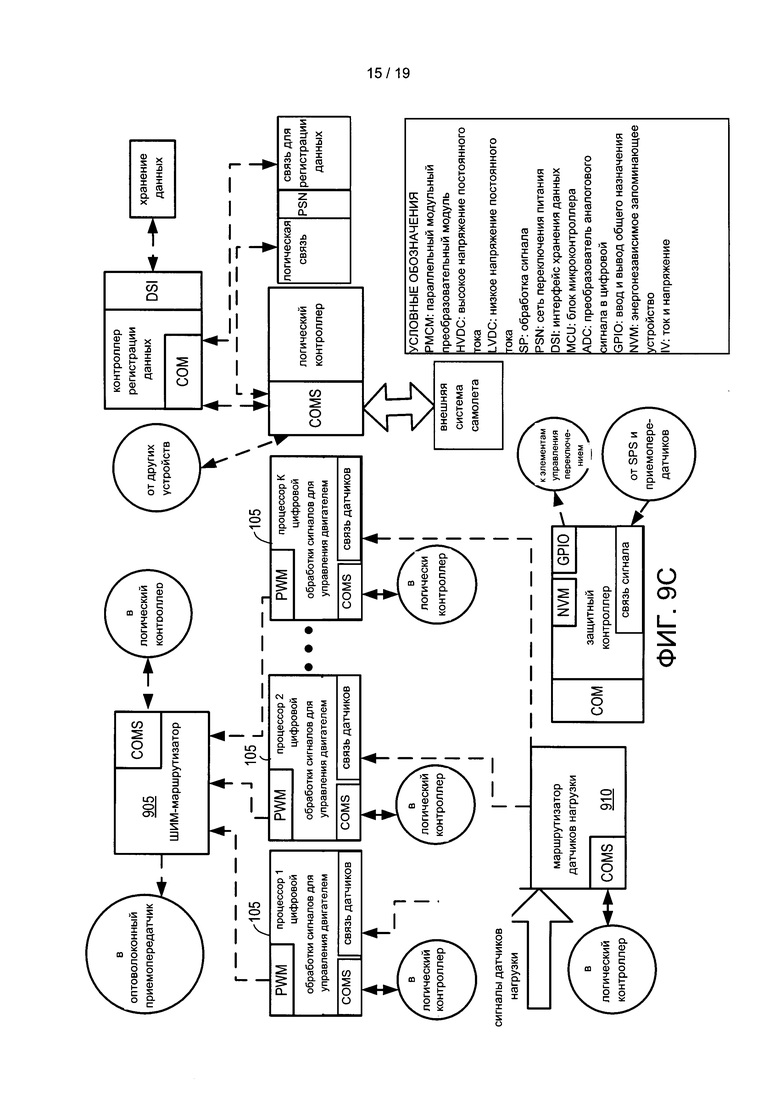




Использование: в области электротехники. Технический результат - обеспечение возможности более полного использования производительности каждого контроллера двигателя с уменьшением веса системы, ее стоимости и сложности. Раскрыты система и способ обеспечения питания для транспортного средства. Система может включать в себя множество параллельных модульных преобразовательных модулей ("модулей"), каждый из которых выполнен с возможностью снабжения заданной электрической нагрузки. Множество параллельных модульных преобразовательных модулей может быть соединено в сеть, чтобы сформировать параллельный модульный преобразователь ("преобразователь") для присваивания приоритетов и назначения каждой электрической нагрузки одному или более параллельным модульным преобразовательным модулям. Каждый модуль может включать в себя внутренний защитный контроллер и логический контроллер. Отдельные модули могут обеспечивать подачу питания на различные нагрузки в транспортном средстве по отдельности или в сочетании с другими модулями. Система может обеспечивать возможность использования меньшего количества контроллеров питания, экономии веса и времени. Контроллеры в системе также могут быть использованы на более высоком уровне с уменьшением ненужной избыточности. 3 н. и 18 з.п. ф-лы, 19 ил.
1. Первый параллельный модульный преобразовательный модуль (100, 200), содержащий:
логический процессор (115), выполненный с возможностью определения частоты и длительности первой широтно-импульсной модуляции "PWM" и выработки соответствующего первого сигнала управления;
процессор "DSP" (105) цифровой обработки сигналов контроллера двигателя, выполненный с возможностью выработки сигнала, подвергнутого широтно-импульсной модуляции PWM, на основе первого сигнала управления;
драйвер (125) управления затвором, выполненный с возможностью активирования инвертора (160) для получения выходного сигнала переменного тока "АС" на основе сигнала, подвергнутого широтно-импульсной модуляции PWM; и
шину (140) обеспечения связи между модулями, выполненную с возможностью связи между первым параллельным модульным преобразовательным модулем и вторым параллельным модульным преобразовательным модулем.
2. Модуль по п. 1, также содержащий выходной фильтр (175) электромагнитных помех "EMI" переменного тока АС для удаления шума из выходного сигнала переменного тока АС.
3. Модуль по п. 1, дополнительно содержащий:
защитный процессор (110), выполненный с возможностью отслеживания одного или более входных сигналов первого параллельного модульного преобразовательного модуля и одного или более выходных сигналов первого параллельного модульного преобразовательного модуля,
причем защитный процессор отключает первый параллельный модульный преобразовательный модуль при обнаружении неисправности.
4. Модуль по п. 3, в котором защитный процессор сообщается с драйвером управления затвором, чтобы отключать первый параллельный модульный преобразовательный модуль при обнаружении неисправности.
5. Модуль по п. 3, в котором защитный процессор содержит один или более датчиков (150) температуры, отслеживающих один или более из следующих параметров: температуру драйвера управления затвором, температуру инвертора и выходную температуру переменного тока АС,
причем неисправность обнаружена, если один или более из следующих параметров: температура драйвера управления затвором, температура инвертора и выходная температура переменного тока АС - выше заданной температуры.
6. Модуль по п. 3, в котором защитный процессор содержит один или более датчиков (155) пробоя для обнаружения тока пробоя на одном или более выводах первого параллельного модульного преобразовательного модуля,
причем неисправность обнаружена, если ток пробоя на одном или более выводах первого параллельного модульного преобразовательного модуля выше заданного тока.
7. Параллельный модульный преобразователь (300), содержащий:
первый параллельный модульный преобразовательный модуль (100, 200), выполненный с возможностью обеспечения первого выходного сигнала переменного тока "АС" и соединенный с шиной обеспечения связи между модулями;
второй параллельный модульный преобразовательный модуль (100, 200), выполненный с возможностью обеспечения второго выходного сигнала переменного тока АС и соединенный с шиной обеспечения связи между модулями;
ведущий логический контроллер (320), выполненный с возможностью
назначения на питание первой нагрузки одного или более модулей из следующих модулей: первого параллельного модульного преобразовательного модуля (415-1) и второго параллельного модульного преобразовательного модуля (415-2);
выбора по меньшей мере первого алгоритма управления из множества алгоритмов управления, который необходимо применить к указанным одному или более модулям; и
маршрутизации первого алгоритма управления к указанным одному или более модулям посредством сети переключения управления; и
ведущий контроллер (315) связи, соединенный с шиной обеспечения связи между модулями для маршрутизации сообщений между ведущим логическим контроллером и указанным одним или более модулями, причем обеспечена возможность управления по меньшей мере одним из таких сигналов, как первый выходной сигнал переменного тока и второй выходной сигнал переменного тока, в ответ на указанные сообщения.
8. Параллельный модульный преобразователь по п. 7, в котором ведущий логический контроллер назначает первую нагрузку первому параллельному модульному преобразовательному модулю и вторую нагрузку второму параллельному модульному преобразовательному модулю.
9. Параллельный модульный преобразователь по п. 7, в котором ведущий логический контроллер подсоединяет первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль параллельно с использованием сети переключения питания и назначает первую нагрузку первому параллельному модульному преобразовательному модулю и второму параллельному модульному преобразовательному модулю.
10. Параллельный модульный преобразователь по п. 7, дополнительно содержащий:
третий параллельный модульный преобразовательный модуль (415-3), выполненный с возможностью обеспечения третьего выходного сигнала переменного тока АС и соединенный с шиной обеспечения связи между модулями,
причем ведущий логический контроллер подсоединяет первый параллельный модульный преобразовательный модуль, второй параллельный модульный преобразовательный модуль и третий параллельный модульный преобразовательный модуль параллельно с использованием сети переключения питания и назначает первую нагрузку первому параллельному модульному преобразовательному модулю, второму параллельному модульному преобразовательному модулю и третьему параллельному модульному преобразовательному модулю.
11. Параллельный модульный преобразователь по п. 7, дополнительно содержащий:
ведущий защитный контроллер (305), выполненный с возможностью отслеживания одного или более входных сигналов и выходных сигналов первого параллельного модульного преобразовательного модуля и одного или более входных сигналов и выходных сигналов второго параллельного модульного преобразовательного модуля,
причем защитный контроллер отключает первый параллельный модульный преобразовательный модуль, второй параллельный модульный преобразовательный модуль или как первый параллельный модульный преобразовательный модуль, так и второй параллельный модульный преобразовательный модуль при обнаружении неисправности.
12. Параллельный модульный преобразователь по п. 11, в котором указанные один или более входных сигналов первого параллельного модульного преобразовательного модуля и указанные один или более входных сигналов второго параллельного модульного преобразовательного модуля содержат одно или более из следующего: входное напряжение и входной ток.
13. Параллельный модульный преобразователь по п. 11, в котором указанные один или более выходных сигналов первого параллельного модульного преобразовательного модуля и указанные один или более выходных сигналов второго параллельного модульного преобразовательного модуля содержат одно или более из следующего: выходное напряжение и выходной ток.
14. Параллельный модульный преобразователь по п. 7, дополнительно содержащий:
ведущий регистратор (310) данных для регистрации одного или более наборов данных; и
носитель (335) для хранения данных, выполненный с возможностью хранения указанных одного или более наборов данных.
15. Параллельный модульный преобразователь по п. 14, в котором указанные один или более наборов данных содержат одно или более из следующего: команды ведущего логического контроллера, сообщения ведущего контроллера связи, сообщения о неисправности и показания датчиков.
16. Параллельный модульный преобразователь по п. 14, дополнительно содержащий:
шину (345) регистрации данных, соединяющую ведущий регистратор данных и носитель для хранения данных,
причем сообщение с передачей регистрации данных реализовано посредством шины регистрации данных, а
сообщение с передачей сигналов управления реализовано посредством шины обеспечения связи между модулями.
17. Способ обеспечения питания, включающий этапы, на которых:
соединяют первый параллельный модульный преобразовательный модуль (415-1) и второй параллельный модульный преобразовательный модуль (415-2), и ведущий логический контроллер (320) с помощью шины (140) обеспечения связи между параллельными модульными преобразовательными модулями;
принимают (1205) один или более запросов нагрузки от одной или более систем воздушного летательного аппарата в ведущем логическом контроллере и
назначают (1220А, 1220В), посредством ведущего логического контроллера, один или более модулей из таких модулей, как первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль, на питание одной или более нагрузок, указанных в одном или более запросов нагрузки,
выбирают по меньшей мере первый алгоритм управления из множества алгоритмов управления, который необходимо применить к первому параллельному модульному преобразовательному модулю и второму параллельному модульному преобразовательному модулю;
осуществляют маршрутизацию первого алгоритма управления к указанным одному или более модулям посредством сети переключения управления;
осуществляют маршрутизацию сообщений между первым параллельным модульным преобразовательным модулем, вторым параллельным модульным преобразовательным модулем и ведущим логическим контроллером посредством ведущего контроллера связи;
обеспечивают одно или более из следующего: первый выходной сигнал переменного тока посредством первого параллельного модульного преобразовательного модуля и второй выходной сигнал переменного тока посредством второго параллельного модульного преобразовательного модуля - для питания одной или более нагрузок.
18. Способ по п. 17, дополнительно включающий этапы, на которых:
принимают первый запрос нагрузки от первой системы воздушного летательного аппарата в ведущем логическом контроллере;
подсоединяют (1215) первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль параллельно с помощью сети (325) переключения питания и
назначают первый запрос нагрузки первому параллельному модульному преобразовательному модулю и второму параллельному модульному преобразовательному модулю.
19. Способ по п. 17, дополнительно включающий этапы, на которых:
принимают первый запрос нагрузки в ведущем логическом контроллере от первой системы воздушного летательного аппарата;
подсоединяют первый параллельный модульный преобразовательный модуль, второй параллельный модульный преобразовательный модуль и третий параллельный модульный преобразовательный модуль параллельно с помощью сети (325) переключения питания; и
назначают первый запрос нагрузки первому параллельному модульному преобразовательному модулю, второму параллельному модульному преобразовательному модулю и третьему параллельному модульному преобразовательному модулю,
причем третий параллельный модульный преобразовательный модуль обеспечивает третий выходной сигнал переменного тока АС.
20. Способ по п. 17, дополнительно включающий этапы, на которых:
принимают первый запрос нагрузки от указанных одной или более систем воздушного летательного аппарата в ведущем логическом контроллере;
подсоединяют первый параллельный модульный преобразовательный модуль и второй параллельный модульный преобразовательный модуль параллельно с помощью сети (325) переключения питания;
назначают первый запрос нагрузки первому параллельному модульному преобразовательному модулю и второму параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера;
обнаруживают неисправность в первом параллельном модульном преобразовательном модуле с помощью ведущего защитного контроллера (305);
подсоединяют второй параллельный модульный преобразовательный модуль и третий параллельный модульный преобразовательный модуль параллельно с помощью указанной сети переключения питания;
назначают первый запрос нагрузки второму параллельному модульному преобразовательному модулю и третьему параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера и
отключают первый параллельный модульный преобразовательный модуль с помощью ведущего защитного контроллера.
21. Способ по п. 17, дополнительно включающий этапы, на которых:
принимают первый запрос нагрузки и второй запрос нагрузки от указанных одной или более систем воздушного летательного аппарата в ведущем логическом контроллере; и
назначают первый запрос нагрузки первому параллельному модульному преобразовательному модулю и второй запрос нагрузки второму параллельному модульному преобразовательному модулю с помощью ведущего логического контроллера.
| US 2007259545 A1, 08.11.2007 | |||
| CN 101474714 A, 08.07.2009 | |||
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА ЗАПУСКА ДВИГАТЕЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2525836C2 |
| US 2008100136 A1, 01.05.2008. | |||

