Область техники, к которой относится изобретение
Изобретение относится к общей технической области блоков накопления электрической энергии.
В частности, изобретение относится к области модулей, содержащих по меньшей мере два блока накопления электрической энергии.
В рамках настоящего изобретения под «блоком накопления электрической энергии» следует понимать либо конденсатор ( то есть пассивную систему, содержащую два электрода и изолятор), либо суперконденсатор ( то есть систему, содержащую два электрода, электролит и разделитель), либо батарею типа литиевой батареи ( то есть систему, содержащую анод, катод и электролит между анодом и катодом).
Уровень техники
Известны модули, называемые также батарейными узлами, содержащие корпус, в котором расположены несколько блоков накопления электрической энергии, которые представляют собой элементы батареи, последовательно соединенные при помощи средств соединения.
Эти модули содержат также электронную плату управления, в частности, для управления зарядкой и разрядкой блоков накопления электрической энергии или обеспечения защиты внутри модуля.
Модуль можно использовать для электрического питания транспортного средства с электрическим двигателем, такого как автобус, грузовик или легковой автомобиль. Для этого транспортное средство содержит на выходе батарей вариатор, позволяющий изменять мощность, передаваемую на двигатель, в зависимости от внешних команд, в частности, от команд пользователя.
Каждое транспортное средство может содержать несколько параллельно соединенных модулей, в частности, если потребности транспортного средства в мощности являются значительными.
Одной из существующих проблем является управление работой этих модулей, в частности, если характеристики модулей начинают разниться по причине точечного или неточечного нарушения в работе одного из батарейных узлов.
Задача изобретения состоит в создании способа и системы, позволяющих контролировать работу модулей накопления электрической энергии транспортного средства с электрическим двигателем, содержащего по меньшей мере два параллельно соединенных модуля накопления электрической энергии.
Раскрытие изобретения
В связи с этим, объектом изобретения является способ управления работой электрического питания транспортного средства с электрическим двигателем, содержащего по меньшей мере два параллельно соединенных модуля накопления энергии, при этом указанные модули выполнены с возможностью обеспечивать двигателю выдаваемую электрическую мощность в пределах между заранее определенной максимальной мощностью и заранее определенной минимальной мощностью. Способ отличается тем, что содержит следующие этапы:
- обнаружение аномалии в работе по меньшей мере одного неисправного модуля,
- понижение максимальной мощности, которую могут выдавать модули, при этом максимальная мощность, получаемая после этапа отключения, строго превышает нулевую мощность, в частности, минимальную мощность,
- электрическое отключение каждого неисправного модуля, при этом этап отключения осуществляют после понижения максимальной мощности.
Предпочтительно транспортное средство содержит силовой контроллер, позволяющий контролировать мощность, выдаваемую модулями, в зависимости от команды пользователя, при этом максимальная мощность соответствует пороговой мощности контролера, при этом понижение максимальной мощности происходит по команде силового контроллера.
Таким образом, на работающем транспортном средстве отключение неисправного модуля накопления энергии можно производить без остановки транспортного средства.
Это обеспечивает:
- высокий уровень безопасности, с одной стороны, в частности, за счет ограничения рисков повреждения модулей накопления электрической энергии в результате значительного обмена током между модулями накопления энергии,
- высокую гибкость использования для пользователя, с другой стороны, в частности, за счет обеспечения электрического отключения модуля накопления энергии, но без необходимости для пользователя останавливать электрическое транспортное средство.
Ограничение максимальной мощности, подаваемой на двигатель, до отключения модуля накопления энергии позволяет:
- избегать проблем с транспортным средством, если пользователь запрашивает очень большую мощность в момент отключения, что может привести к повреждениям на уровне механизма отключения (силовых контакторов),
- избегать слишком большой задержки отключения модуля накопления энергии. Способ в соответствии с изобретением имеет следующие предпочтительные, но не ограничительные признаки:
- этап понижения может включать в себя подэтапы, на которых:
- подают команду на понижение максимальной мощности, которую могут выдавать модули, затем
- выжидают заранее определенный период времени, прежде чем осуществить этап отключения;
при этом подача команды на отключение неисправного модуля после заранее определенного периода времени гарантирует, что максимальная мощность, подаваемая на двигатель, действительно уменьшилась, когда осуществляют этап отключения модуля,
- в варианте этап понижения может включать в себя подэтапы, на которых:
- подают команду на понижение максимальной мощности, которую могут выдавать модули, затем
- считывают по меньшей мере один параметр, связанный с мощностью двигателя, проверяют, чтобы указанный по меньшей мере параметр отвечал критерию понижения мощности:
- если указанный параметр понижения мощности соблюден, осуществляют этап отключения,
- в противном случае возвращаются на этап считывания указанного по меньшей мере одного параметра, связанного с мощностью двигателя;
при этом параметром, связанным с мощностью двигателя, может быть, например, мощность двигателя, скорость перемещения транспортного средства, сила тока, проходящего через двигатель или вариатор, и т.д.;
при этом взаимосвязь отключения неисправного модуля с соблюдением критерия позволяет, с одной стороны, убедиться, что максимальная мощность, сообщаемая двигателю, действительно была понижена до отключения модуля и, с другой стороны, ограничить время между действительным понижением максимальной мощности и отключением неисправного модуля;
- этап обнаружения может включать в себя для каждого модуля следующие подэтапы:
- считывают по меньшей мере один параметр, отображающий характеристики рассматриваемого модуля, и
- по меньшей мере для одного параметра сравнивают значение параметра по меньшей мере с одним заранее определенным пороговым значением для идентификации возможной аномалии в работе рассматриваемого модуля;
при этом параметром, отображающим характеристики модуля, может быть, например, напряжение на клеммах модуля или сила проходящего через него электрического тока, температура модуля и т.д.;
при этом аномалию можно обнаружить, если параметр превышает пороговое значение или если получена конкретная комбинация параметров, превышающая или нет пороговое значение;
- способ дополнительно содержит этап повышения максимальной мощности, которую могут выдавать модули, при этом указанный этап повышения осуществляют после этапа отключения. Этот этап, как и любой этап понижения или повышения мощности, осуществляют, в частности, путем подачи команды на силовой контроллер;
это позволяет пользователю использовать транспортное средство после отключения неисправного модуля;
- способ дополнительно содержит этап передачи тревожного сигнала в звуковой или визуальный сигнальный прибор транспортного средства для оповещения пользователя об аномалии и/или отключении;
это позволяет информировать пользователя об аномалии, чтобы он мог предпринять соответствующие меры с учетом возможной последующей потери скорости,
- этап понижения состоит в непрерывном понижении максимальной мощности, которую могут выдавать модули, таким образом, чтобы изменение максимальной мощности было постепенным, в частности линейным;
это позволяет избежать резкого падения скорости перемещения транспортного средства и, следовательно, ограничить риски дорожно-транспортных происшествий,
- способ дополнительно содержит этап выжидания в течение заранее определенного времени между этапом обнаружения и этапом понижения;
это выжидание обеспечивает пользователю время, достаточное для адаптации его вождения к возможной последующей потере скорости,
- по меньшей мере во время запуска транспортного средства способ содержит этап предварительной нагрузки силового контроллера, такого как вариатор, что позволяет контролировать выдаваемую модулями мощность в зависимости от команды пользователя, при этом указанный этап предварительной нагрузки включает в себя электрическое подключение силового контроллера к данному модулю таким образом, чтобы повысить напряжение на клеммах силового контроллера перед его подключением ко всем модулям;
этап предварительной нагрузки позволяет избежать рисков повреждения силового контроллера за счет повышения напряжения на его клеммах до значения, близкого к напряжению на клеммах данного модуля;
- этап предварительной нагрузки включает в себя подэтап, на котором выбирают разный данный модуль при каждом запуске транспортного средства;
использование разного модуля при каждом запуске с целью осуществления этапа предварительной нагрузки позволяет ограничить риски повреждения конкретного модуля и позволяет уравновесить старение различных модулей;
- перед подэтапом выбора разного данного модуля этап предварительной нагрузки включает в себя подэтап, на котором определяют группу неисправных модулей, обнаруженных во время предыдущего запуска транспортного средства, при этом подэтап выбора состоит в выборе данного модуля среди модулей, не входящих в группу обнаруженных неисправных модулей,
- по меньшей мере один модуль накопления энергии, в частности, каждый модуль накопления содержит множество последовательно соединенных элементов батареи.
Объектом изобретения является также система контроля работы электрического питания транспортного средства с электрическим двигателем, содержащего по меньшей мере два параллельно соединенных модуля накопления энергии, при этом указанные модули выполнены с возможностью обеспечивать двигателю выдаваемую электрическую мощность в пределах между заранее определенной максимальной мощностью и заранее определенной минимальной мощностью, при этом система содержит:
- средства обнаружения аномалии в работе по меньшей мере одного неисправного модуля,
- средства понижения максимальной мощности, которую могут выдавать модули, таким образом, чтобы максимальная мощность оставалась строго превышающей нулевую мощность,
- средства отключения каждого неисправного модуля.
Систему в соответствии с изобретением программируют для осуществления этапов описанного выше способа, в частности при помощи блока обработки.
Система в соответствии с изобретением содержит также силовой контроллер, позволяющий контролировать выдаваемую модулями мощность в зависимости от команды пользователя, при этом максимальная мощность соответствует пороговой мощности контроллера, при этом средства понижения максимальной мощности содержат средства управления силовым контроллером.
Объектом изобретения является также компьютерный программный продукт, содержащий кодовые программные команды, записанные на носителе, используемом в компьютере, отличающийся тем, что он содержит команды для осуществления описанного выше способа.
Краткое описание чертежей
Другие отличительные признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве неограничивающего примера, со ссылками на прилагаемые чертежи.
На фиг. 1 схематично показано транспортное средство с электрическим двигателем;
на фиг. 2 представлен пример способа контроля питания транспортного средства с электрическим двигателем;
на фиг. 3 показана часть элементов, входящих в состав транспортного средства с электрическим двигателем;
на фиг. 4 представлена схема устройства накопления электрической энергии.
Осуществление изобретения
Далее со ссылками на фигуры следует описание различных вариантов выполнения модуля в соответствии с изобретением. На этих различных фигурах эквивалентные элементы имеют одинаковые цифровые обозначения.
1. Основной принцип работы
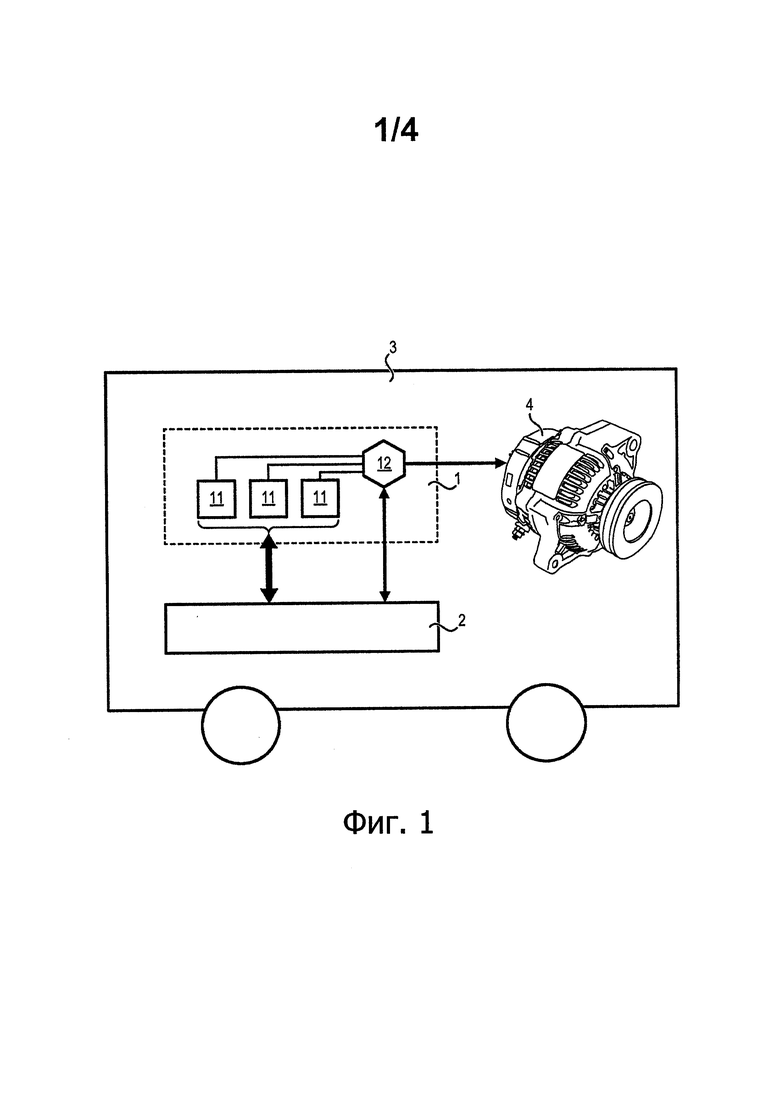
На фиг. 1 представлен пример системы 2 контроля работы электрического питания транспортного средства 3 с электрическим двигателем 4.
Транспортное средство 3 содержит устройство 1 накопления электрической энергии, в том числе:
- три параллельно установленных модуля 11 накопления электрической энергии, и
- силовой контроллер 12, установленный последовательно с тремя модулями 11 на выходе этих трех модулей.
Каждый модуль 11 содержит несколько блоков 11 накопления электрической энергии типа батареи, обеспечивающих накопление электрической энергии для ее дальнейшего потребления электрическим двигателем 4 транспортного средства 3. Силовой контроллер выполнен с возможностью контроля мощности, подаваемой на электрический двигатель, в зависимости от команды пользователя, при этом значение мощности, выдаваемой модулями, может меняться от заранее определенного минимального значения мощности (нулевая мощность) до заранее определенного и регулируемого максимального значения мощности.
Транспортное средство 3 содержит также блок 2 обработки, соединенный с модулями 11. Блок 2 обработки содержит, например, компьютер(ы), процессор(ы), микроконтроллер(ы), микрокомпьютер(ы), программируемый(ые) автомат(ы), интегральную(ые) схему(ы) специального приложения или другие известные специалисту устройства.
Блок 2 обработки позволят управлять работой устройства 1 накопления электрической энергии. В частности, блок 2 обработки обеспечивает управление зарядкой и разрядкой модулей 11, а также диагностику модулей 11. Блок обработки позволяет также управлять силовым контроллером. В частности, блок обработки выполнен с возможностью конфигурирования силового контроллера, в частности, посредством изменения значения пороговой мощности контроллера, то есть максимальной мощности, которую могут выдавать модули 11, и, следовательно, максимальной мощности, которая может потребоваться электрическому двигателю 4. Связь блока обработки с модулями 11 может быть прямой, тогда как связь с силовым контроллером является опосредованной, через супервизор, что будет описано ниже.
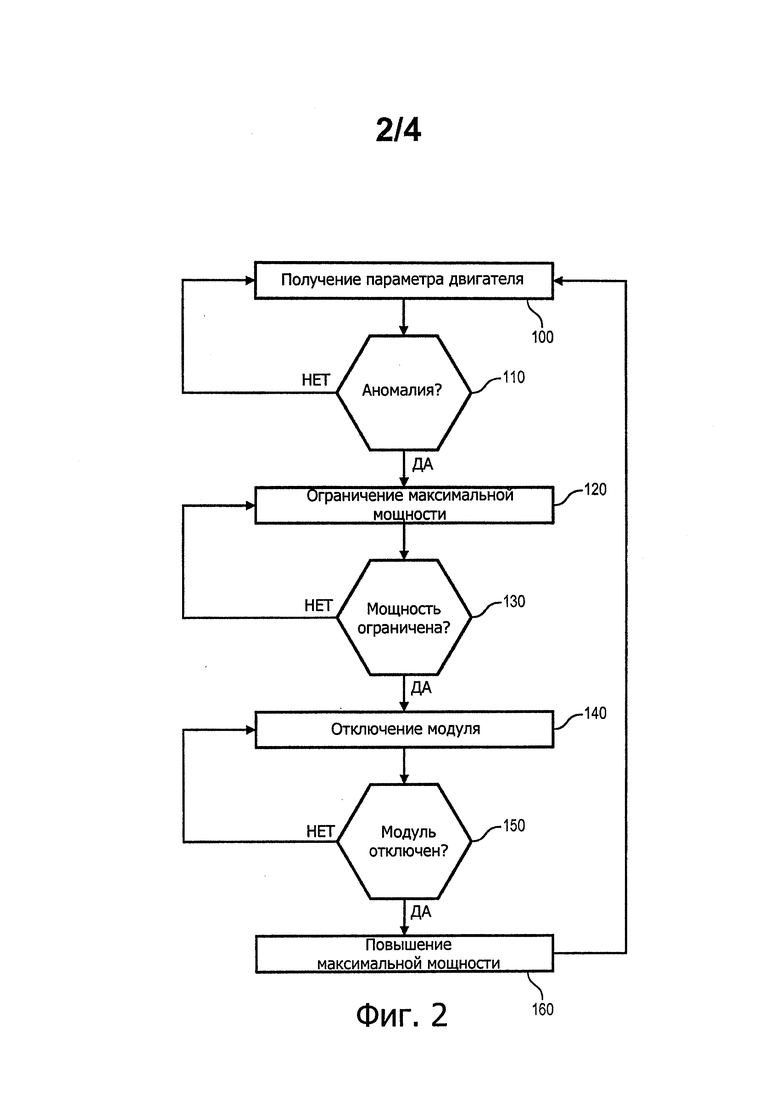
Блок 2 обработки запрограммирован для осуществления способа, представленного на фиг. 2. Принцип работы блока 2 обработки состоит в следующем.
Во время работы электрического транспортного средства 3 блок 2 обработки отслеживает (этапы 100, 110) возможные аномалии модулей 11. Эта фаза отслеживания появления возможных аномалий будет более подробно описана ниже со ссылками на фиг. 3.
Если блок обработки не обнаруживает аномалии, максимальная мощность, которую могут выдавать модули 11, равна первоначальному значению.
Когда блок 2 обработки обнаруживает аномалию на модуле 11, он подает команду в силовой контроллер 12 на ограничение максимальной мощности, которую могут выдавать модули 11 (этапы 120, 130). В частности, блок 2 обработки заменяет первоначальное значение максимальной мощности на ограниченное значение, меньшее первоначального значения, но отличающееся от нулевой мощности, что оказывает влияние на максимальную скорость транспортного средства.
После понижения значения максимальной мощности блок 2 обработки подает команду на отключение неисправного модуля 11 (этап 140). Ограничение мощности, сообщаемой двигателю, до отключения неисправного модуля 11 позволяет:
- избегать рисков повреждения других модулей 11, в частности, в случае значительного обмена электрическим током между модулями 11 во время отключения неисправного модуля 11,
- не создавать проблем для транспортного средства, в частности, если пользователь запрашивает от модулей 11 очень большую мощность в момент отключения, что могло бы привести к повреждениям на уровне механизма отключения (управляемые выключатели и т.д.), и
- ограничить время между обнаружением аварии на модуле 11 и отключением неисправного модуля 11.
Таким образом, описанный выше блок 2 обработки обеспечивает отключение неисправного модуля 11, не прибегая к остановке транспортного средства 3.
Отключение неисправного модуля 11 (то есть переход от этапа понижения максимальной мощности к этапу отключения модуля) может произойти, если соблюден критерий отключения.
Например, в варианте выполнения блок 2 обработки содержит датчик, позволяющий измерять один или несколько параметров, называемых «рабочими параметрами» и связанных с мощностью двигателя 4. Это измерение позволяет обнаружить снижение максимальной мощности, сообщаемой двигателю 4. Если значение(я) этого(их) рабочего(их) параметра(ов) показывает(ют) блоку 2 обработки, что максимальная мощность, выдаваемая модулями 11, уменьшилась, блок 2 обработки осуществляет отключение неисправного модуля 11 (этап 140). Это позволяет гарантировать, что уменьшение максимальной мощности, сообщаемой двигателю, действительно произошло до отключения модуля 11.
В варианте команду на отключение неисправного модуля 11 можно подать после заранее определенного периода времени.
Например, в варианте выполнения отключение неисправного модуля 11 блоком 2 обработки происходит по истечении заранее определенного периода времени после обнаружения аномалии. Это позволяет гарантировать, что отключение модуля 11 произошло после понижения максимальной мощности, с одной стороны, и ограничить число датчиков, используемых блоком 2 обработки, с другой стороны.
После электрического отключения неисправного модуля 11 блок 2 обработки может быть запрограммирован для восстановления первоначального значения максимальной мощности, сообщаемой двигателю 4 (этап 160). В частности, после отключения неисправного модуля 11 блок 2 обработки заменяет ограниченное значение максимальной мощности, сообщаемой двигателю 4 (пороговая мощность силового контроллера), на первоначальное значение мощности. Таким образом, пользователь может нормально использовать свое транспортное средство 3 после отключения.
Этот вариант выполнения осуществляют, в частности, если транспортное средство содержит по меньшей мере три соединенных параллельно модуля 1 накопления электрической энергии.
В примере выполнения блок 2 обработки может заменить первое ограниченное значение максимальной мощности вторым ограниченным значением максимальной мощности:
- превышающим ограниченное значение мощности и
- меньшим или равным первоначальному значению.
Факультативно, блок 2 обработки может информировать пользователя об обнаружении аномалии на одном из модулей 11. Для оповещения пользователя блок 2 обработки может передать информацию на средства визуальной индикации или средства звуковой сигнализации.
Блок 2 обработки может также выдать пользователю сообщение, в котором указана обнаруженная проблема и действия, которые необходимо предпринять для решения этой проблемы. Сообщение может быть передано через приборную панель транспортного средства (бортовой компьютер, сигнализатор …) в визуальной и/или звуковой форме.
Предпочтительно блок 2 обработки может произвести отключение неисправного модуля 11 по истечении данного периода времени после передачи сообщения пользователю. Это позволяет пользователю принять соответствующие меры с учетом предстоящей потери скорости.
2. Фаза обнаружения аномалии
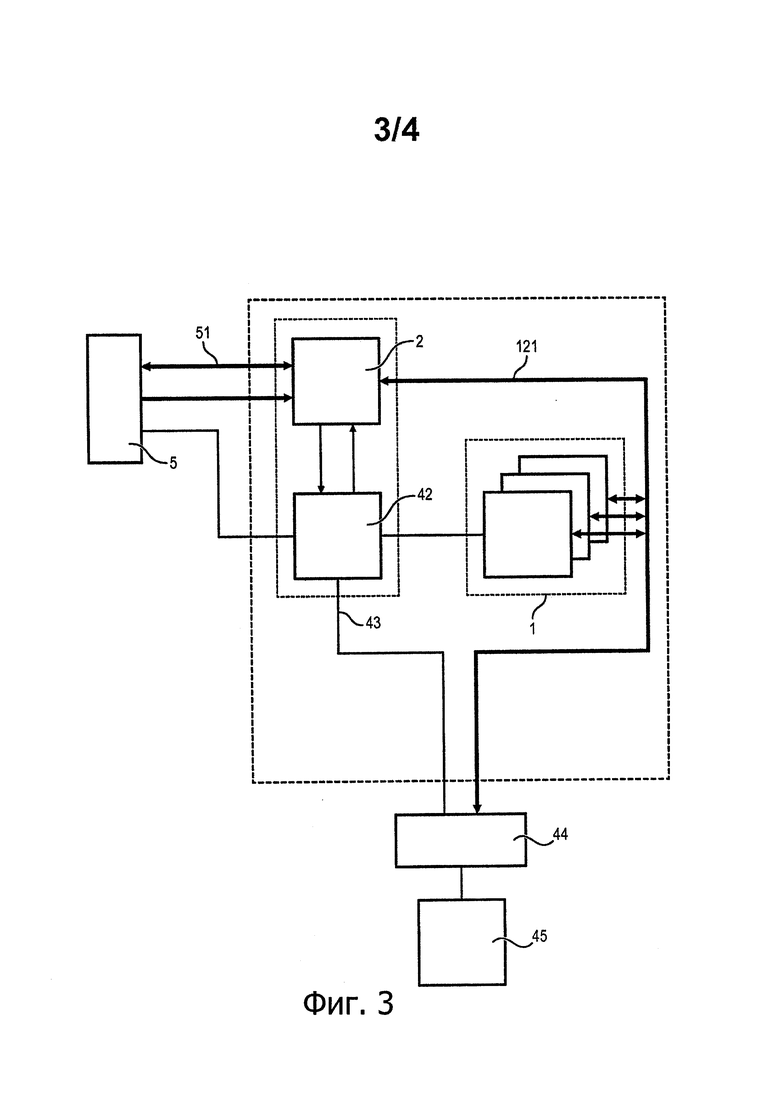
На фиг. 3 показана функциональная схема некоторых элементов транспортного средства с электрическим двигателем.
Транспортное средство содержит супервизор 5, блок 2 обработки и устройство 1 накопления электрической энергии.
Супервизор 5 обеспечивает управление блоком 2 обработки, который осуществляет управление устройством 1 накопления энергии и сообщается с различными агрегатами транспортного средства, например, с электрическим двигателем, с приборной панелью и с силовым контроллером 12 при помощи по меньшей мере одной шины связи. Иначе говоря, супервизор отслеживает и устанавливает связь со всеми агрегатами транспортного средства, за исключением модулей 1 накопления энергии, которыми напрямую управляет блок 2 обработки.
Устройство 1 накопления содержит, в частности, три установленных параллельно модуля 11. Модули 11 обеспечивают накопление электрической энергии. Они связаны с электрическим двигателем 4 при помощи силовой линии связи 41 и технической зоны 42 взаимодействия. Модули 11 связаны также через силовую линию связи 43 с электрическим соединителем 44. Этот электрический соединитель 44 предназначен для соединения с наружным зарядным устройством 45 для обеспечения электрического питания модулей 11. Модули 11 соединены также с блоком 2 обработки.
Блок 2 обработки также соединен:
- с супервизором 5 через первую шину связи 51, такую как шина «сети контроллера» (или шина "CAN" от англо-саксонского выражения "Controller Area Network"),
- с модулями 11 через вторую шину связи 121.
Блок 2 обработки выполнен с возможностью обнаружения одной или нескольких аномалий на одном или нескольких модулях 11.
В частности, блок 2 обработки выполнен с возможностью:
- получать информацию от каждого из модулей 11 и от других элементов транспортного средства через супервизор и первую шину связи CAN, и
- в зависимости от этой информации передавать команды:
- на устройство 1 накопления для уменьшения максимальной мощности, подаваемой на двигатель 4, для отключения неисправного модуля 11 и т.д., и
- на транспортное средство 3 для оповещения пользователя о выходе из строя неисправного модуля 11, и т.д.
Рабочий(ие) параметр(ы), в зависимости от которого(ых) блок 2 обработки может обнаруживать одну или несколько аномалий, может(гут) входить в следующий список:
- напряжение на клеммах модулей 11,
- сила тока, проходящего через модули 11,
- температура модулей 11,
- характеристика сигналов, поступающих в супервизор 5 (например, запрос на экстренную остановку),
- электрические характеристики по меньшей мере одного компонента модулей 11.
Параметр(ы) отключения, в зависимости от которого/которых блок 2 обработки может произвести отключение модуля или модулей 11, может(гут) входить в следующий список:
- мощность двигателя 4,
- скорость транспортного средства 3,
- ток, проходящий через электрический орган, например, силового контроллера 12, и т.д.
Блок 2 обработки работает согласно следующему принципу.
Во время использования транспортного средства блок 2 обработки осуществляет мониторинг рабочего состояния модулей 11.
В частности, блок 2 обработки получает рабочий параметр или рабочие параметры, измеряемые, например, на месте в модулях 11 соответствующими датчиками, такими как датчики напряжения, тока, температуры и т.д., через первую шину связи CAN 51 и/или вторую шину связи 121. Блок 2 обработки сравнивает каждый полученный рабочий параметр с пороговым значением.
Если результат сравнения удовлетворяет критерию нормальной работы, значит все модули 11 исправны. Например, если температура модулей 11 ниже записанной в памяти заранее определенной предельной температуры, значит, модули находятся в нормальном рабочем состоянии. Блок 2 обработки продолжает получать и сравнивать рабочий(е) параметр(ы) с пороговым(и) значением(ями).
Если результат сравнения не удовлетворяет критерию нормальной работы, значит, один из модулей 11 неисправен. Например, если температура модуля 11 превышает записанную в памяти заранее определенную предельную температуру, значит, этот модуль 11 неисправен.
Блок 2 обработки передает в супервизор 5 через первую шину связи сигнал для возможного оповещения пользователя о нарушении в работе. Блок 2 обработки передает в силовой контроллер 12 через первую шину связи 51 командный сигнал для понижения максимальной мощности, выдаваемой модулями.
Блок 2 обработки проверяет, произошло или нет понижение сообщаемой двигателю максимальной мощности. Для этого блок 2 обработки получает один или несколько параметров отключения. Каждый полученный параметр отключения сравнивают с пороговым значением, чтобы проверить соблюдение критерия, связанного с понижением максимальной мощности, сообщаемой двигателю. Например, блок 2 обработки считывает значение скорости перемещения транспортного средства, тока или мощности двигателя и сравнивает его с заданным значением.
Если этот критерий не проверяется, блок 2 обработки не подает команду на отключение неисправного модуля и возобновляет считывание параметра или параметров отключения после определенного времени выжидания.
Если критерий проверяется, блок 2 обработки подает команду на отключение неисправного модуля. В частности, блок 2 обработки предает в устройство 1 накопления через вторую шину связи 121 сигнал для отключения неисправного модуля 11.
После отключения неисправного модуля 11 блок 2 обработки может подать команду на увеличение максимальной мощности, выдаваемой модулями 11. В частности, блок 2 обработки передает в силовой контроллер 12 через первую шину связи 51 и супервизор командный сигнал для увеличения значения сообщаемой двигателю максимальной мощности (пороговой мощности контроллера).
3. Фаза отключения неисправного модуля
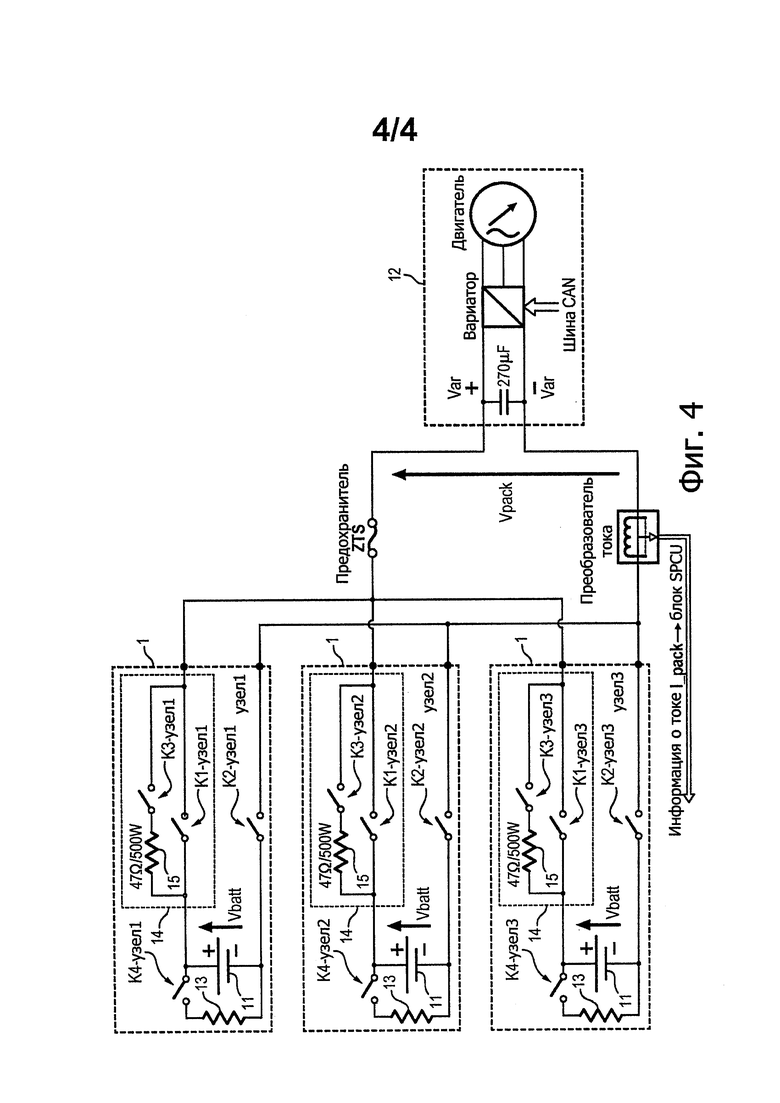
На фиг. 4 более подробно представлен пример устройства 1 накопления электрической энергии. Это устройство 1 накопления электрической энергии содержит три параллельно соединенных модуля 11 и силовой контроллер 12.
Каждый модуль 11 содержит несколько блоков накопления электрической энергии (не показаны), последовательно соединенных друг с другом. Каждый модуль 11 связан с:
- управляемым выключателем К2, соединенным с положительной клеммой модуля,
- нагревательным блоком, подключенным параллельно с модулем 11, при этом нагревательный блок содержит электрическое нагревательное сопротивление 13, последовательно соединенное с управляемым выключателем К4,
- цепь 14 предварительной нагрузки, соединенную с положительной клеммой модуля, при этом цепь 14 предварительной нагрузки содержит:
- блок предварительной нагрузки, состоящий из электрического сопротивления 15 предварительной нагрузки, последовательно соединенного с управляемым выключателем К3, и
- управляемый выключатель К1, установленный параллельно с блоком 14 предварительной нагрузки.
Три установленных параллельно модуля 11 соединены электрически также с силовым контроллером 12.
Силовой контроллер 12 позволяет изменять мощность, подаваемую на двигатель, в пределах от нулевой мощности до максимальной мощности. Эта подаваемая на двигатель мощность зависит от мощности, затребованной пользователем (например, при нажатии на педаль акселератора транспортного средства).
В варианте выполнения, показанном на фиг. 4, силовой контроллер 12 содержит конденсатор, установленный параллельно с вариатором. Конденсатор обеспечивает фильтрацию сигналов, передаваемых в вариатор. Вариатор позволяет изменять сообщаемую двигателю мощность в зависимости от использования транспортного средства.
Блок 2 обработки подключен к силовому контроллеру 12 через первую шину связи 51. Это позволяет блоку обработки уменьшать/увеличивать значение максимальной мощности, определенное в силовом контроллере.
В варианте выполнения блок 2 обработки выполнен с возможностью линейного уменьшения (соответственно увеличения) значения максимальной мощности, определенного в силовом контроллере. Для этого блок обработки передает в силовой контроллер через первую сеть связи множество промежуточных сигналов, соответствующих промежуточным значениям максимальной мощности. Значения последовательных промежуточных сигналов являются:
- уменьшающимися в случае постепенного понижения максимальной мощности, подаваемой на двигатель, или
- возрастающими в случае повышения максимальной мощности, подаваемой на двигатель.
Далее следует более подробное описание принципа подключения/отключения модулей.
Контроль разрешения запуска
Перед любым подключением модулей 11 к двигателю блок обработки проверяет, чтобы не было расхождения между напряжением различных модулей 11. Если отклонение напряжения между различными модулями входит в допустимый интервал значений, блок обработки и/или супервизор разрешает запуск транспортного средства. В противном случае запуск транспортного средства не разрешен, и блок обработки указывает пользователю через супервизор, что необходимо возобновить зарядку транспортного средства.
Фаза предварительной нагрузки
После разрешения запуска транспортного средства и перед подключением различных модулей 11 осуществляют фазу предварительной нагрузки, во время которой:
- для данного модуля выключатели (то есть силовые контакторы) К3 и К2 замкнуты и выключатель К1 разомкнут,
- для других модулей выключатели K1, К2, К3 разомкнуты.
Блок обработки измеряет напряжение Vbatt на клеммах данного модуля и напряжение Vpack на клеммах силового контроллера. При соблюдении определенных критериев (например, Vpack>95% Vbatt и Ipack<2А) предварительная нагрузка считается завершенной. Этот этап предварительной нагрузки позволяет повысить напряжение на клеммах фильтрующего конденсатора (и вариатора) до такого же уровня, что и у данного модуля, чтобы избежать сильных и разрушающих токов во время подключения других модулей.
Только один из модулей может содержать цепь 14 предварительной нагрузки и может быть использован для осуществления этой фазы предварительной нагрузки при каждом запуске транспортного средства. Однако, чтобы предохранять модули во время этой фазы предварительной нагрузки, их используют поочередно при каждом запуске транспортного средства в зависимости от команд, подаваемых блоком обработки. Это обеспечивает работу устройства накопления энергии, даже если один из модулей отключен.
Подключение модулей
После осуществления фазы предварительной нагрузки блок обработки подает команду на подключение модулей к силовому контроллеру. Модуль, использованный во время фазы предварительной нагрузки, подключают в первую очередь. Для подключения этого модуля связанный с ним выключатель К1 замыкают, а связанный с ним выключатель К3 размыкают (К2 остается замкнутым). После этого производят подключение других модулей (после времени выжидания), последовательно замыкая выключатели К2, затем К1 для каждого из этих модулей.
В случае блока обработки, содержащего три модуля, во время фазы подключения управляемые выключатели имеют следующие состояния:
- первоначальные условия:
предварительная нагрузка действительно произведена, сигнал «Расхождение напряжения узла» (сигнал, относящийся к отклонению напряжения между модулями) отсутствует
- подсоединение первого модуля:
- замыкают управляемый выключатель K1_pack1, при этом K2_pack1 остается замкнутым,
- размыкают управляемый выключатель K3_pack1, (первый модуль подсоединен);
- выжидание, запущенное блоком обработки, после завершения выжидания переходят на следующий этап,
- подсоединение второго модуля:
- замыкают управляемый выключатель K2_pack2, затем
- замыкают управляемый выключатель K1_pack2 (второй модуль подсоединен),
- выжидание, запущенное блоком обработки, после завершения выжидания переходят на следующий этап,
- подсоединение третьего модуля:
- замыкают управляемый выключатель K2_pack3, затем
- замыкают управляемый выключатель K1_pack3 (третий модуль подсоединен).
Следует отметить, что, естественно, подключение осуществляют после поступления запроса на движение от транспортного средства.
Фаза движения
После подключения всех трех модулей транспортное средство находится в фазе движения. Блок обработки измеряет один или несколько параметров, связанных с различными модулями, например:
- электрическое напряжение на клеммах каждого модуля,
- температуру каждого модуля,
- электрический ток каждого модуля и т.д.
Эти значения сравнивают с предварительно записанными в памяти пороговыми значениями.
Если результат операции сравнения показывает, что измеренные значения являются нормальными, все три модуля остаются подключенными к силовому контроллеру.
Однако если измеренные значения не являются нормальными для одного из модулей, блок обработки отмечает неисправность модуля. В этом случае блок обработки запускает этапы ограничения максимальной мощности и отключения неисправного модуля, показанные на фиг. 2.
В первую очередь блок 2 обработки оповещает пользователя об обнаружении аномалии. Для этого блок 2 обработки направляет сообщение в супервизор 5, который передает сообщение через первую шину связи 51 транспортного средства, чтобы информировать пользователя, например, при помощи визуального сигнализатора, находящегося на приборной панели транспортного средства, и/или звукового сигнала.
После передачи тревожного сигнала блок 2 обработки запускает таймер (или счетчик времени) на несколько секунд (например, на 1 минуту), чтобы пользователь успел припарковаться на обочине или в соответствующем месте (в правом ряду, если он находится на автодороге), и т.д.
По истечении времени, заданного таймеру, блок обработки подает команду в силовой контроллер для уменьшения значения сообщаемой двигателю максимальной мощности (пороговой мощности силового контроллера). Таким образом, мощность, затребованная пользователем, постепенно снижается и больше не зависит от действий пользователя, если он запрашивает мощность, превышающую максимальную мощность.
Блок обработки измеряет также значение параметра отключения, связанного с затребованной двигателем мощностью (например, скорость транспортного средства, или сила тока вариатора или двигателя). Если значение параметра отключения ниже заданного значения, блок обработки, который получает эту информацию через первую шину связи транспортного средства (например, скорость транспортного средства) или от измерительных датчиков устройства накопления электрической энергии, подает команду на отключение неисправного модуля.
Для этого блок обработки подает команду на размыкание выключателей К1 и К2 неисправного модуля. При этом нет необходимости в дополнительной проверке, так как с учетом понижения сообщаемой двигателю максимальной мощности электрический ток Ipack, проходящий через силовой контроллер, меньше порогового значения, которое обеспечивает беспрепятственное отключение неисправного модуля.
После отключения неисправного модуля блок обработки подает команду на размыкание выключателя К4, что соответствует безопасному состоянию, поскольку все управляемые выключатели неисправного модуля разомкнуты. Эта конфигурация не соответствует классической конфигурации остановки, во время которой К4 остается замкнутым для поддержания соответствующей температуры модуля.
После осуществления этого этапа блок обработки информирует об этом водителя через супервизор с установлением связи через первую шину связи транспортного средства и восстанавливает нормальную работу силового контроллера, постепенно увеличивая максимальную мощность, выдаваемую модулями.
Предпочтительно блок обработки может сохранять в памяти информацию о неисправном модуле. Это позволяет избегать повторного подключения неисправного модуля к транспортному средству во время его следующего запуска.
В варианте выполнения блок обработки можно запрограммировать с возможностью определения категории аномалии неисправного модуля. В частности, блок обработки можно запрограммировать таким образом, чтобы определять, является ли аномалия неисправного модуля:
- устранимой аномалией, например, в случае недостаточной зарядки модуля, или
- неустранимой аномалией, например, такой как повреждение компонента, входящего в состав неисправного модуля.
В зависимости от категории аномалии блок обработки может быть запрограммирован для осуществления различных действий. Например:
- в случае устранимой аномалии блок обработки может быть запрограммирован таким образом, чтобы определять, можно ли опять подключать неисправный модуль к транспортному средству во время его последующего запуска,
- в случае неустранимой аномалии блок обработки может быть запрограммирован с возможностью передачи через первую шину связи CAN транспортного средства информации, предназначенной для пользователя и оповещающей его о необходимости направить транспортное средство на техническое обслуживание.
Специалисту понятно, что в описанные выше способ и систему можно вносить различные изменения, не выходя за рамки описанных сведений и преимуществ.
Например, блок обработки может быть встроен в устройство накопления электрической энергии или может быть расположен отдельно от него. Точно также этот блок обработки может быть встроен в супервизор или может быть отдельным от него. С другой стороны, некоторые функции, реализуемые блоком обработки, можно осуществлять в силовом контроллере.
Группа изобретений относится к электрическим тяговым системам транспортных средств. Способ управления работой электрического питания транспортного средства с электрическим двигателем заключается в том, что с помощью блока обработки обнаруживают аномалии в работе по меньшей мере одного неисправного модуля, управляют блоком обработки так, чтобы силовой контроллер понижал максимальную мощность, выдаваемую модулями, и электрически отключают каждый неисправный модуль после понижения максимальной мощности. Транспортное средство содержит параллельно соединенные модули накопления энергии, силовой контроллер, позволяющий контролировать мощность, выдаваемую модулями, и блок обработки для осуществления диагностики модулей и управления силовым контроллером. Также заявлена система контроля работы электрического питания транспортного средства с электрическим двигателем. Технический результат заключается в повышении надежности системы электрического питания транспортного средства. 2 н. и 11 з.п. ф-лы, 4 ил.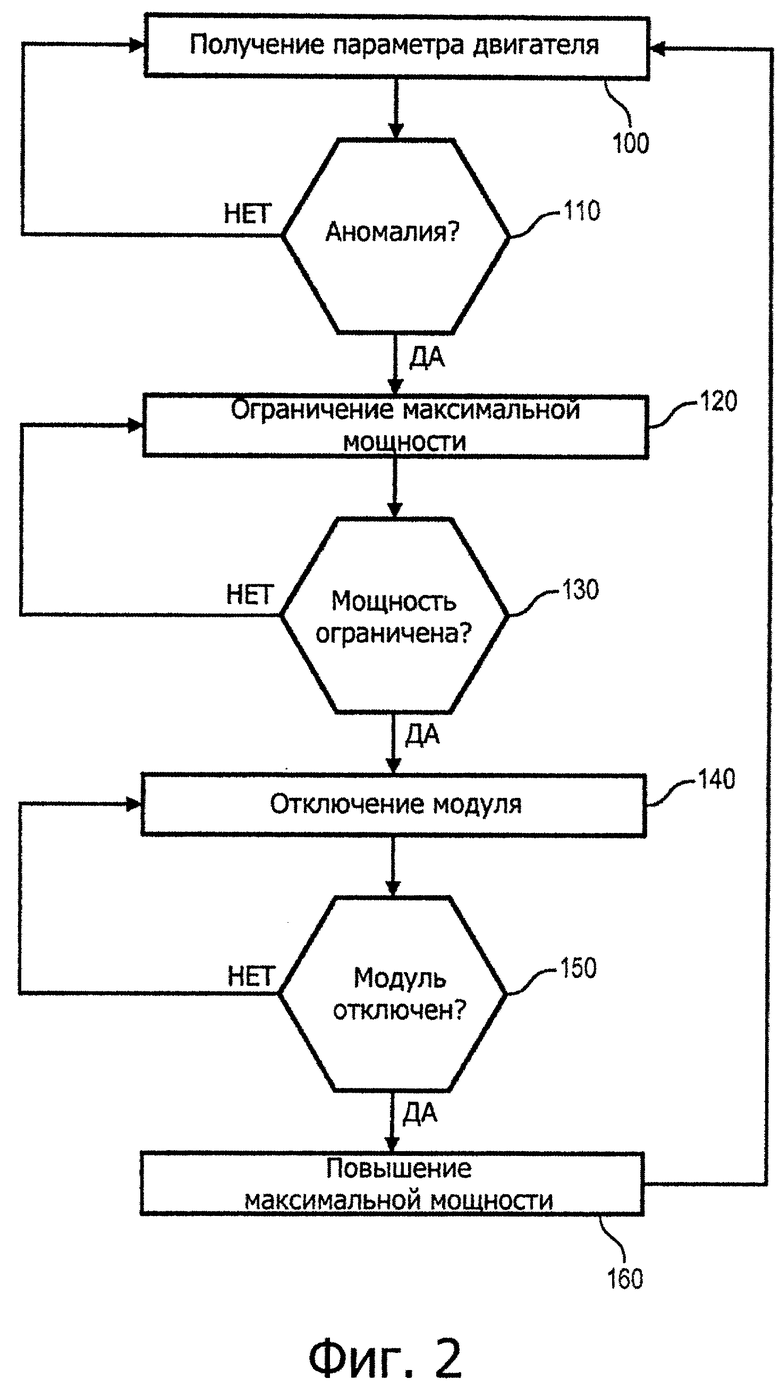
1. Способ управления работой электрического питания транспортного средства (3) с электрическим двигателем, причем это транспортное средство (3) содержит по меньшей мере два параллельно соединенных модуля (11) накопления энергии, при этом указанные модули выполнены с возможностью обеспечивать двигателю выдаваемую электрическую мощность в пределах между заранее определенной максимальной мощностью и заранее определенной минимальной мощностью, отличающийся тем, что содержит следующие этапы:
- обнаружение (100, 110) аномалии в работе по меньшей мере одного неисправного модуля с помощью указанного блока (2) обработки,
- управление блоком (2) обработки так, чтобы блок обработки управлял силовым контроллером (12) для понижения (120, 130) максимальной мощности, выдаваемой модулями в электрический двигатель, сохраняя при этом указанную максимальную мощность строго выше нулевой мощности,
- электрическое отключение (140) каждого неисправного модуля после понижения максимальной мощности, осуществленного силовым контроллером,
при этом транспортное средство содержит
- силовой контроллер (12), позволяющий контролировать мощность, выдаваемую модулями (11), в зависимости от мощности, затребованной пользователем транспортного средства, при этом максимальная мощность соответствует пороговой мощности контролера, причем этот силовой контролер содержит конденсатор, установленный параллельно с вариатором для изменения мощности, сообщаемой электрическому двигателю, и
- блок (2) обработки для осуществления диагностики модулей накопления энергии и управления силовым контроллером.
2. Способ управления по п. 1, в котором этап понижения максимальной мощности включает в себя подэтапы, на которых:
- подают команду на понижение максимальной мощности, которую могут выдавать модули, затем
- выжидают заранее определенный период времени, прежде чем осуществить этап отключения.
3. Способ управления по п. 1, в котором этап понижения максимальной мощности включает в себя подэтапы, на которых:
- подают команду на понижение максимальной мощности, которую могут выдавать модули, затем
- считывают по меньшей мере один параметр, связанный с мощностью двигателя,
- проверяют, чтобы указанный по меньшей мере один параметр отвечал критерию понижения мощности:
- если указанный параметр понижения мощности соблюден, осуществляют этап отключения,
- если нет, то возвращаются на этап определения указанного по меньшей мере одного параметра, связанного с мощностью двигателя.
4. Способ управления по любому из пп. 1-3, в котором этап обнаружения включает в себя для каждого модуля следующие подэтапы:
- считывают (100) по меньшей мере один параметр, отображающий характеристики рассматриваемого модуля, и
- по меньшей мере для одного параметра сравнивают (110) значение параметра по меньшей мере с одним заранее определенным пороговым значением для идентификации возможной аномалии в работе рассматриваемого модуля.
5. Способ управления по любому из пп. 1-3, который дополнительно содержит этап (160), на котором блок обработки управляет силовым контроллером для повышения максимальной мощности, которую могут выдавать модули, при этом указанный этап повышения осуществляют после этапа отключения.
6. Способ управления по любому из пп. 1-3, который дополнительно содержит этап передачи тревожного сигнала в звуковой или визуальный сигнальный прибор транспортного средства для оповещения пользователя об аномалии и/или отключении.
7. Способ управления по любому из пп. 1-3, в котором этап понижения максимальной мощности состоит в непрерывном понижении максимальной мощности, которую могут выдавать модули так, чтобы изменение максимальной мощности было постепенным, в частности, линейным.
8. Способ управления по любому из пп. 1-3, который дополнительно содержит этап выжидания в течение заранее определенного времени между этапом обнаружения и этапом понижения.
9. Способ управления по любому из пп. 1-3, который во время по меньшей мере одного запуска транспортного средства дополнительно содержит этап предварительной нагрузки силового контроллера, при этом указанный этап предварительной нагрузки включает в себя электрическое подключение силового контроллера к данному модулю так, чтобы повысить напряжение на клеммах силового контроллера перед его подключением ко всем модулям.
10. Способ управления по п. 9, в котором этап предварительной нагрузки включает в себя подэтап, на котором выбирают разный заданный модуль при каждом запуске транспортного средства (3).
11. Способ управления по п. 10, в котором перед подэтапом выбора разного данного модуля этап предварительной нагрузки включает в себя подэтап, на котором определяют группу неисправных модулей, обнаруженных во время предыдущего запуска транспортного средства, при этом подэтап выбора состоит в выборе данного модуля среди модулей, не входящих в группу обнаруженных неисправных модулей.
12. Способ управления по любому из пп. 1-3, 10, 11, в котором по меньшей мере один модуль накопления энергии содержит множество последовательно соединенных элементов батареи.
13. Система контроля работы электрического питания транспортного средства (3) с электрическим двигателем (4), содержащего по меньшей мере два параллельно соединенных модуля (11) накопления энергии, при этом указанные модули выполнены с возможностью обеспечивать двигателю выдаваемую электрическую мощность в пределах между заранее определенной максимальной мощностью и заранее определенной минимальной мощностью, отличающаяся тем, что она содержит:
- блок (2) обработки для обнаружения аномалии в работе по меньшей мере одного неисправного модуля и отключения каждого неисправного модуля,
- силовой контроллер (12), позволяющий контролировать выдаваемую модулями мощность в зависимости от мощности, затребованной пользователем транспортного средства, при этом максимальная мощность соответствует пороговой мощности контроллера, причем этот силовой контролер содержит конденсатор, установленный параллельно с вариатором для изменения мощности, сообщаемой электрическому двигателю,
при этом блок (2) обработки выполнен с возможностью управления силовым контроллером для понижения максимальной мощности, выдаваемой модулями в электрический двигатель, сохраняя при этом указанную максимальную мощность строго выше нулевой мощности.
| US 2007247106 A1, 25.10.2007 | |||
| DE 102011011799 A1, 23.08.2012 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ВАКЦИНЫ ПРОТИВ КОЛИБАКТЕРИОЗА КРОЛИКОВ | 2009 |
|
RU2404801C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ, ТРАНСПОРТНОЕ СРЕДСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ СИСТЕМУ ЭЛЕКТРОПИТАНИЯ, И СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ | 2007 |
|
RU2408128C1 |
| Способ и приспособление для испытания смазочных материалов на поглощение пыли | 1938 |
|
SU57970A1 |

