Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использована на подвижных составах железных дорог для контроля и управления автоматическими тормозами при вождении грузовых поездов и пассажирских повышенного веса и длины с синхронным или асинхронным торможением с головы (локомотива), хвоста поезда и каждого вагона.
Общей проблемой при вождении пассажирских и товарных поездов повышенного веса и длины является (наряду с другими проблемами) качество торможения, т.е. при торможении, например, при остановке на станции в настоящее время торможение начинается с головы состава. Начинает тормозиться локомотив, затем головной вагон и т.д. вплоть до последнего, это происходит из-за конструктивных особенностей построения тормозной пневмомагистрали.
Как следствие этого, требуется решить следующие частные подпроблемы:
- уменьшение динамических усилий в составе при торможении;
- сокращение тормозного пути и времени до полной остановки;
- неравномерность износа тормозных колодок по длине состава;
- обеспечение синхронного управления торможением по всей дине состава.
Известны «Автотормоза для поездов повышенного веса и длины» См. обзоры ТМЗ ТРАНСМАШ от 11.10.2006 г.
Недостатками этой системы являются:
- недостаточная помехозащищенность передаваемой по радиоканалу кодированной информации;
- отсутствие автоматического определения режима управления пневматическим торможением поезда;
- отсутствие управления тормозами с головы и хвоста поезда по командам, поступающим от локомотивных систем безопасности.
Известно «Устройство контроля целостности тормозной магистрали поезда по радиоканалу УКТМ» см. статью Крылова В.В. «Автотормоза для поездов повышенного веса и длины: Техническое состояние, проблемы, перспективы» Журнал «ЛОКОМОТИВ». 2006, №8 стр.27-29.
Недостатками этой системы являются: не обеспечивается требуемая достоверность при передаче команд и сообщений по радиоканалу, недостаточность сигнальных показаний для оперативного принятия решений. Это неприемлемо для управления торможением с использованием блока хвостового вагона, особенно при экстренном торможении поезда.
Известна система управления тормозами поездов повышенного веса и длины, состоящая из локомотивного и вагонного полукомплектов оборудования, которые размещены соответственно в кабине локомотива и на свободной автосцепке хвостового вагона поезда. Каждый полукомплект состоит из антенно-фидерного устройства, фильтра, блока индикации, радиомодема, источника питания, пневмоблока, ЭВМ. Радиомодемы предназначены для передачи служебной информации команд по радиоканалу в режиме помехоустойчивого кодирования. В кабине локомотива установлен регулятор локомотивного торможения, определяющий режим управления тормозами по изменениям давления воздуха в тормозном оборудовании локомотива. Регулятор локомотивного торможения посредством кабелей соединен соответственно с пультом, радиомодемом и блоком сопряжения сигналов с системой автоматического управления тормозами. Технический результат заключается в обеспечении необходимой достоверности передачи служебной информации и команд по радиоканалу, автоматическое определение режимов управления пневматическими тормозами поезда и вида торможения, автоматическое управление пневматическими тормозами поезда с головы и хвоста поезда от систем безопасности локомотива - ПРОТОТИП, см. патент РФ №2385247.
Недостатками прототипа является: недостаточная эффективность торможения, которое начинается с локомотива и хвостового вагона, а в обе стороны от средины состава торможение еще не работает, пока тормозная волна не распространится во всей магистрали, т.е. большая длина тормозного пути длительное время до полной остановки и неравномерно изнашиваются тормозные колодки, также наличие аккумулятора, который требует подзарядки, а при минусовой температуре тем более часто.
Технической задачей заявленного решения является повышение качества торможения за счет:
- уменьшения тормозного пути и времени до полной остановки;
- плавности торможения;
- почти полного снятия динамических нагрузок;
- равномерности распределения усилий на тормозные колодки по всей длине состава.
Для решения поставленной задачи предлагаются способ и устройство управления тормозами поездов повышенного веса и длины, основанный на равномерном распределении тормозного усилия одновременно по всему составу, отличающийся тем, что сигнал торможения с локомотива передается на все вагоны состава по радиоканалу, где принимается к исполнению для чего в каждом вагоне кинетическая энергия торможения вагона преобразуется в электрическую и используется по вышеуказанному сигналу для управления тормозным вагонным пневмоблоком своего вагона, обеспечивая тем самым равномерное торможение всего состава; устройство, состоящее из локомотивного и вагонного полукомплектов оборудования, размещенных соответственно в кабине локомотива и в каждом вагоне, включающие в себя радиомодемы, радиоканал, микроконтроллеры, блок клавиатуры и индикации, кран машиниста, пневмоблок вагонный, блок питания вагонного полукомплекта содержит привод маховика, непосредственно маховик, генератор напряжения постоянного тока и стабилизатор напряжения, соединенные последовательно, причем на валу маховика находится генератор напряжения постоянного тока; маховик может быть выполнен в классическом чисто механическом варианте, либо в вакуумной камере, либо на магнитном подвесе.
На чертеже изображена структурная схема устройства, на которой показано: 1 - радиомодем локомотива (РМ), 2 - регулятор локомотивного торможения, 3 - микроконтроллер (МС), 4 - блок клавиатуры и индикации, 5 - кран торможения машиниста, 6 - источник питания схемы локомотива, 7 - радиомодем вагона, 8 - микроконтроллер вагонный,9 - пневмоблок вагонный, 10 - привод маховика, 11 - маховик, 12 - генератор постоянного тока, 13 - стабилизатор постоянного тока вагонный, 14 - тормозная пневмомагистраль состава, 15 - атмосфера, 16 - радиоканал, А1 - антенна радиомодема локомотива, A2-AN - антенны радиомодемов вагонов (состава).
Схема имеет следующие соединения.
Схема локомотивной части.
Вход/выход МС3 первой двунаправленной шиной соединен с входом/выходом радиомодема 1, выход которого через антенну А1 образует вх/вых радиоканала 16. Вход источника питания 6 соединен с бортовой цепью питания локомотива напряжением постоянного тока величиной 50 В. Выход крана торможения машиниста 5 механически соединен с тормозной пневмомагистралью состава 14 и с информационным входом МС3 электрически, МС3 второй двунаправленной шиной соединен с управляющим входом крана машиниста 5 напрямую в случае электронного крана машиниста 5 или через регулятор локомотивного торможения 2 при механическом его исполнении, связи блока клавиатуры и индикации условно не показаны.
Схема вагонной части (каждого вагона подвижного состава).
Радиоканал 16 всего состава через индивидуальную антенну каждого вагона A2-N соединен с радиоканалом 7, выход которого двунаправленной шиной связи соединен с МС8, выход которого соединен двунаправленной шиной с пневмоблоком вагонным 9, выход последнего соединен с тормозной пневмомагистралью состава 14 в пневмоблоке 9 устанавливается привод маховика, на оси которого расположен маховик 11 непосредственно или через редуктор. На выходном валу маховика 11 расположен генератор постоянного тока 12 питания электронной части вагонного устройства через стабилизатор 13.
Конструктивно система (электронная часть устройства в локомотиве и в каждом вагоне) выполнена в виде блоков и содержит соединенные между собой кабелем системного интерфейса оборудование, предназначенное для установки на локомотиве и в каждом вагоне.
Оборудование, предназначенное для установки на локомотиве и в вагонах, включает:
Антенны A1-AN: устанавливается на локомотиве и каждом вагоне. Блок клавиатуры и индикации 4 предназначен для ввода данных в МС3, нужных для синхронизации вагонных устройств, задания режимов торможения и пр, а также для индикации состояния тормозов, режимов торможения, опробования тормозов и т.д. МС8 имеет интерфейс для обмена с внешними устройствами.
Радиомодем 1 и 7 предназначен для организации симплексной передачи цифровой информации по радиоканалу 16.
Источник питания 6 - импульсный преобразователь - предназначен для питания электронных частей устройства.
Кран машиниста 5 - прибор торможения, предназначенный для управления пневматическими тормозами локомотива и состава.
Микроконтроллер МС8 предназначен для организации работы вагонной электронной части устройства.
Пневмоблок 9 вагонный - электромеханическое устройство - производящее соединение тормозной магистрали 14 с атмосферой 15 посредством электропневматических клапанов и дополнительно может иметь в своем составе датчик давления воздуха.
Привод 10 маховика 11 предназначен для вращения маховика во время сброса воздуха в тормозной магистрали при торможении.
Маховик 11 служит для продолжения своего вращения после остановки поезда на время своего выбега, т.к. на валу маховика находится генератор постоянного тока для выработки напряжения через стабилизатор 13 питания электронной части вагонного устройства.
Способ и устройство функционируют следующим образом.
После формирования состава МС1 машиниста заносится вся необходимая информация о предстоящем маршруте, как-то пункт назначения, остановки в пути, маршрут следования, повороты, спуски/подъемы, время прохождения участков пути и т.д. Эта информация заносится или с клавиатуры 4 либо с карты памяти, либо по радиоканалу. После чего машинист проводит технологическую проверку тормозной пневмомагистрали состава 14, во время которой в каждом вагоне через цепь: пневмоблок вагонный 14, привод 10 раскручивается маховик 11 и генератор 13 вырабатывает напряжение постоянного тока, которое стабилизируется стабилизатором 13 и поступает на все электронные узлы вагонного полукомплекта, который готов к работе, МС8 обнуляется и через радиомодем 7 и радиоканал 16 сообщает МС3 о своей готовности. После сбора готовности всех вагонных полукомплектов машинист начинает движение. Маховик 11 в силу своей запасенной энергии продолжает крутиться. Следует заметить, что маховик 11 может быть выполнен в нескольких вариантах: чисто механический в опорных подшипниках весом 1,5-2 кг может крутиться без подкрутки 10-12 минут, в вакуумной камере до 30 минут, на магнитной подвеске до 1,5 час. Во время движения всегда есть участки пути с торможением, а именно: повороты, спуски, станции и т.д. на которых маховик 11 все время подкручивается. В то же время с началом торможения по радиоканалу 16 передается на МС8 всех вагонов сигнал начала торможения и величина тормозного усилия: слабое, среднее, большое или экстренное, этот сигнал через радиомодем 7, МС8 и пневмоблок вагонный 9 воздействует на тормозную систему каждого вагона. Таким образом обеспечивается одновременное торможение каждого вагона состава, что исключает динамические нагрузки и обеспечивает плавность торможения, а время до полной остановки и расстояние тормозного пути сокращается почти в два раза.
Несомненным достоинством предположенного технического решения является автономность схемы торможения каждого вагона, одновременность их работы и отсутствие специального питания: +50 В в вагонной цепи от локомотива или аккумулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2012 |
|
RU2513878C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2008 |
|
RU2385247C1 |
| СПОСОБ И СИСТЕМА РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ | 2014 |
|
RU2571000C2 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ЛОКОМОТИВОМ И ПОДТАЛКИВАЮЩИМ ЛОКОМОТИВОМ ПОЕЗДА ПО РАДИОКАНАЛУ | 2015 |
|
RU2578640C1 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ МАНЕВРОВОГО ЛОКОМОТИВА ПРИ ПРОВЕДЕНИИ МАНЕВРОВ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИЙ | 2010 |
|
RU2436698C2 |
| Способ управления и диагностики тормозной системой поезда с применением технологии цифрового двойника и устройство для его реализации | 2022 |
|
RU2820579C2 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
Изобретение относится к области управления тормозами поезда. При управлении тормозами поездов повышенного веса и длины равномерно распределяют тормозное давление по всему составу. Сигнал торможения с локомотива передают на все вагоны состава по радиоканалу. Кинетическую энергию торможения вагона преобразуют в электрическую и используют по вышеуказанному сигналу для управления тормозным вагонным пневмоблоком (ПнП) своего вагона, обеспечивая равномерное торможение всего состава. Достигается равномерность распределения усилий на тормозные колодки по всему составу, уменьшение тормозного пути, экономия электроэнергии. 2 н. и 14 з.п. ф-лы, 1 ил.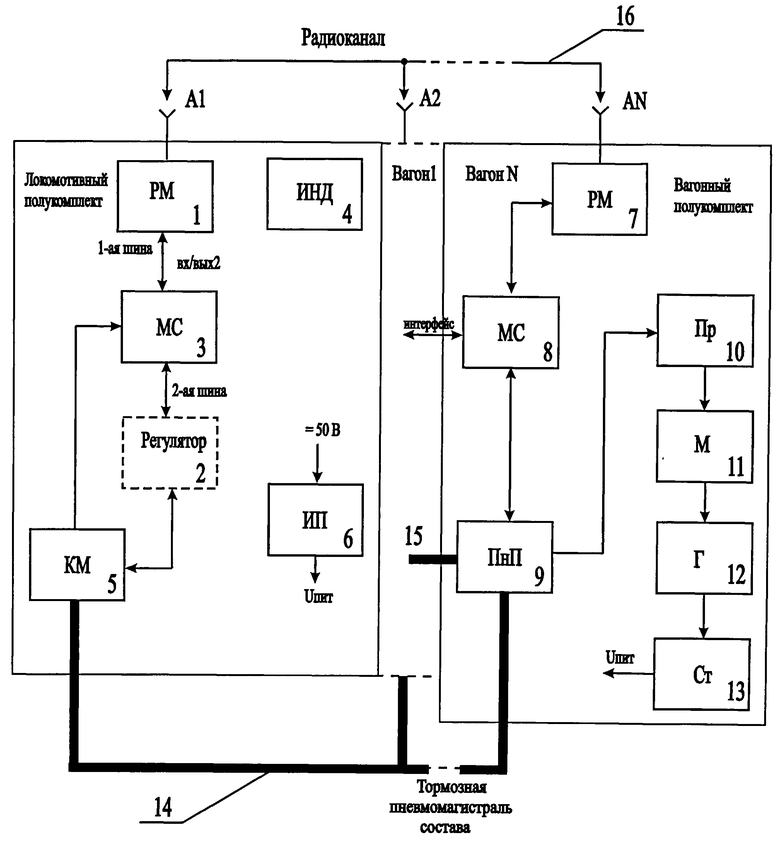
1. Способ управления тормозами поездов повышенного веса и длины, основанный на равномерном распределении тормозного давления одновременно по всему составу, отличающийся тем, что сигнал торможения с локомотива передается на все вагоны состава по радиоканалу, где принимается к исполнению, для чего в каждом вагоне кинетическая энергия торможения вагона преобразуется в электрическую и используется по вышеуказанному сигналу для управления тормозным вагонным пневмоблоком своего вагона, обеспечивая тем самым равномерное торможение всего состава.
2. Устройство управления тормозами поездов повышенного веса и длины, состоящее из локомотивного и вагонного полукомплектов оборудования, размещенных соответственно в кабине локомотива и в каждом вагоне, включающие в себя радиомодемы, радиоканал, микроконтроллеры, блок клавиатуры и индикации, кран машиниста, пневмоблок вагонный, отличающееся тем, что блок питания вагонного полукомплекта содержит привод маховика, непосредственно маховик, генератор напряжения постоянного тока и стабилизатор напряжения, соединенные последовательно, причем на валу маховика находится генератор напряжения постоянного тока.
3. Устройство по п.2, отличающееся тем, что маховик может быть выполнен либо в классическом чисто механическом варианте, либо в вакуумной камере, либо на магнитном подвесе.
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2008 |
|
RU2385247C1 |
| US 20100282122 A1, 11.11.2010. | |||

