Изобретение относится к способам предотвращения проникновения вражеских средств разведки и нападения с помощью размещенных в воздухе проволочных заграждений и может быть использовано в мирное время для предотвращения террористических несанкционированных проникновений беспилотных летательных аппаратов (БЛА) на контролируемую территорию (территорию государства через границу) с целью проведения разведки или при ведении боевых действий при совершении противником разведывательных полетов и нанесении ударов по объектам с помощью БЛА.
Существует способ противодействия выполнению задач беспилотным летательным аппаратом, проводимый зенитным комплексом и заключающийся в радиолокационном обзоре воздушного пространства, в обнаружении БЛА с помощью радиолокационной станции обнаружения, во взятии БЛА на автоматическое сопровождение по углу места s и азимуту Р, а возможно и по дальности R станцией сопровождения целей, в выборе режима стрельбы комплекса по БЛА (пушечным или ракетным вооружением), в передаче координат БЛА и других данных из станции обнаружения и станции сопровождения в центральную вычислительную систему для решения задачи управления стрельбой в соответствии с выбранным режимом стрельбы, в открытии огня по БЛА и в его поражении осколками боевой части ракеты или снарядами, в оценке результатов стрельбы для определения необходимости повторного обстрела БЛА или переноса огня на другую цель [1]. В перечне задач современного зенитного пушечно-ракетного комплекса «Тунгуска-М» [1] указано, что он предназначен для противовоздушной обороны объектов от ударов тактической и армейской авиации, вертолетов огневой поддержки, беспилотных летательных аппаратов и т.д. Уничтожение БЛА входит в указанный перечень не только отдельно взятого зенитного пушечно-ракетного комплекса, но и в число боевых задач подавляющего большинства зенитных комплексов и систем РФ [2-7].
Недостатком данного способа является [8]:
1) низкая вероятность обнаружения БЛА станцией обнаружения комплекса, особенно при использовании мини-БЛА и микро-БЛА с геометрическими размерами менее одного метра;
2) значительно сниженная (по сравнению с другими типовыми для зенитных комплексов воздушными целями) вероятность поражения даже в глубине зоны поражения на малой дальности, так как данная вероятность существенно зависит от геометрических размеров цели;
3) относительная дороговизна реализации, так как стоимость боевого снаряжения зенитного комплекса значительно превышает стоимость БЛА, задачи которого могут дублироваться несколькими другими однотипными БЛА, а после взятия БЛА на сопровождение комплекс раскрывает свое местонахождение и может стать объектом удара других БЛА, противорадиолокационных ракет, управляемых авиабомб и пр.
Существует иной способ противодействия выполнению задач беспилотным летательным аппаратом [9], заключающийся в том, что с помощью высокоточной системы обнаружения и прицеливания обнаруживают выполняющий свои задачи БЛА, переходят в режим слежения (прицеливания) за БЛА по угловым координатам (а лучше - по угловым координатам ε, β и по дальности R), наводят на БЛА луч боевого лазерного аппарата высокой мощности, расположенного на платформе бронемашины или ей подобного средства, и удерживают луч лазера на БЛА до тех пор, пока этот БЛА не выйдет из строя.
Недостатком данного способа является требование очень высокой точности определения координат БЛА для вывода луча лазера в точку его нахождения, что по существу является вероятностным (недостоверным) событием. При этом вероятность вывода лазера в точку БЛА в процессе постоянного движения БЛА сильно уменьшается при наличии помех, снижении освещенности (если система обнаружения является оптической), увеличении дальности до БЛА, уменьшении высоты его полета, а при наличии осадков лазерное излучение сильно поглощается ими и поражающее действие пропадает.
Известен также способ противодействия выполнению задач беспилотным летательным аппаратом, названный способом функционального поражения радиоэлектронного оборудования БЛА [10], который включает обнаружение объекта, распознавание факта принадлежности объекта к классу БЛА, переход в режим точного сопровождения БЛА с наведением на него луча станции слежения (перекрестья оптического координатора), облучение БЛА мощным потоком сверхвысокочастотного излучения на частотах, соответствующих диапазону частот бортового радиоэлектронного оборудования БЛА. Имеются и другие разнообразные варианты реализации функционального поражения полупроводниковых радиоэлектронных средств ракет и БЛА мощным излучением [11].
Недостатком данного способа является необходимость применения дорогостоящей аппаратуры для создания мощности порядка единиц-десятых долей ГВт. Другим недостатком является необходимость попадания поражающего излучения на раскрыв приемопередающей системы БЛА, что не всегда возможно и зависит от положения планера БЛА относительно излучателя. Недостатком также является непреднамеренное поражение всех иных радиоэлектронных средств, не относящихся к средствам разведки противника или БЛА-нарушителя, и невозможность оперативного установления факта того, что БЛА действительно выведен из рабочего режима, подавлен, его оборудование не в состоянии обеспечивать возложенные задачи.
Известен также способ противодействия выполнению задач беспилотным летательным аппаратом [12], заключающийся в том, что беспилотный летательный аппарат обнаруживается радиолокационным или оптическим средством обнаружения, и после грубого измерения его координат, т.е. угла места ε, азимута β, дальности R и высоты Н в район его полета направляют специальные беспилотные летательные аппараты (или один такой аппарат) с аппаратурой постановки помех спутниковому или иному каналу навигации и ориентирования, которые постоянно используются совершающими полеты в областях несанкционированных пролетов или в приграничных областях беспилотными летательными аппаратами противоборствующей стороны, располагают аппараты с аппаратурой постановки помех как можно ближе к беспилотному нарушителю и обязательно выше его траектории (местонахождения), т.е. в области пространства, которую БЛА использует для приема сигналов навигации со спутника, включают при подлете аппаратуру постановки помех и перемещают постановщики помех (т.е. свои БЛА) по направлению траектории беспилотного нарушителя до тех пор, пока он не выйдет за границу контролируемой территории или не прекратит полет по причине крушения, падения или самоликвидации.
Этот способ противодействия отличается наибольшей эффективностью, но имеет при этом следующие нижеперечисленные недостатки:
ограниченность времени полета и работы аппаратуры постановки помех;
нецелесообразность и вредность использования помехопостановщиков в районах полетов своих средств со спутниковой навигацией;
невозможность препятствовать уходу беспилотного нарушителя на базу дислокации с полученными данными;
невозможность воздействия (ликвидации, прекращения полета) на ударные БЛА, движущиеся по заранее запланированной траектории к объекту поражения;
трудность сохранения режима помехопостановки в канале навигации при хороших маневренных свойствах беспилотного нарушителя, т.е. трудность постоянного слежения за его перемещением.
Задачей изобретения является разработка нового способа противодействия выполнению задач беспилотным летательным аппаратом, отличающегося длительным временем действия, относительной дешевизной, эффективностью, адаптацией к высоте полета беспилотного нарушителя, применимого как в мирное, так и в военное время, пригодного к использованию как по разведывательным, так и по ударным БЛА.
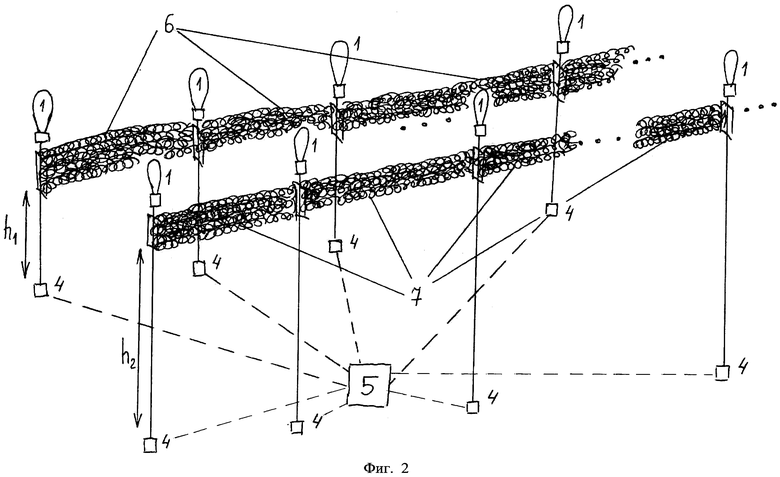
Для решения задачи изобретения предлагается использовать систему из N аэростатов 1 (см. фиг.1), закрепленных тросами в точках A1, А2,…AN к земной поверхности. Аэростаты 1 располагаются в военное время на переднем крае обороны территории, занятой дружественными или своими войсками, и должны прикрывать коридор наиболее вероятного пролета вражеских разведывательных и ударных БЛА. В мирное время аэростаты располагают вдоль границ с сопредельными государствами, откуда ожидаются несанкционированные проникновения подобных БЛА.
Каждый аэростат должен иметь контейнер 3 с аппаратурой ближнего радиолокационного, оптического, тепловизионного обнаружения 3, аналогичного используемому на БЛА. Контейнеры 3 крепятся снизу аэростатов (по одному на каждый аэростат). Наличие на аэростатах средств обнаружения оптического и радиолокационного диапазонов обеспечивает более качественный поиск воздушных объектов в зоне ответственности или зоне наиболее вероятных пролетов БЛА (в коридоре ожидаемых проникновений БЛА). Информация об обнаруженных воздушных объектах искусственного происхождения поступает по проводным (оптоволоконным, кабельным) линиям связи, закрепленным внутри тросов 2, удерживающих аэростаты 1, или по радиолиниям управления на пункт обработки информации и управления (ПОИУ) 5 (на фиг.1 линии связи показаны пунктирными линиями).
Пункт обработки информации и управления 5 объединяет и отождествляет информацию обнаружения от контейнеров 3 различных аэростатов 1 и передает ее на общий пункт управления средствами противодействия БЛА. Предполагается, что предлагаемая система противодействия является элементом более глобальной системы, обладающей большим многообразием средств обнаружения и последующего воздействия на БЛА. Такими средствами обнаружения могут быть, например, типовые радиолокационные станции средств противовоздушной обороны или гражданской авиации. А к способам воздействия можно отнести совокупность адаптивно взаимодействующих способов-аналогов [1, 9-11], способа-прототипа [12], а также подъем авиации и применение ее бортового стрелкового оружия, искусственное образование сильных порывов ветра, изморози, осадков, ударных волн небольшого радиуса действия, использование атак специально обученных хищных птиц или направленных полетов больших стай птиц, сбивающих на своем пути все летающие аппараты, в том числе и беспилотные, направление в районы полетов БЛА специально обученных дельтапланеристов или парапланеристов с задачей уничтожения БЛА из стрелкового оружия или отлова БЛА специальными средствами захвата (сачки, сетки и т.д.).
Тросы, удерживающие аэростаты 2, закрепляются на земной поверхности специальными контейнерами 4 с редукторами, управляемыми ПОИУ 5. Редукторы должны иметь возможность увеличивать или уменьшать высоту подъема аэростатов h, т.е. наматывать или разматывать тросы аэростатов по сигналам управления. Первоначальная высота подъема аэростата должна быть максимальной для увеличения дальности и качества обнаружения БЛА с помощью аппаратуры обнаружения, размещенной в контейнере 3. А затем она может изменяться для того, чтобы область препятствий для пролета БЛА соответствовала высоте его полета, или для того, чтобы освободить воздушный коридор для пролета своей авиации.
Основным элементом противодействия выполнению задач БЛА является система проволочных заграждений, закрепленная на прямоугольных каркасах, которые подвешиваются под аэростатами. Проволочные образования (препятствия) должны представлять собой так называемые путанки, широко используемые в наземных инженерных заграждениях для пехоты противника [13]. Проволочные путанки должны по высоте перекрывать область Y порядка 10-20 метров (а по возможности и больше), так как точность определения высоты полета БЛА невысока, а в условиях априорной неопределенности - вообще неизвестна. При отсутствии сведений о высоте полета БЛА высота удержания путанок должна соответствовать наиболее вероятной высоте полета БЛА по опыту их предыдущих проникновений. Проволока путанки должна быть самой тонкой из известных модификаций. Желательно использовать гладкую проволоку без зазубрин и игл, так как такая конструкция имеет меньший вес и, следовательно, требует меньших размеров аэростатов. Степень запутывания и переплетения отдельных проволочин (волосков) в путанке должна быть такой, чтобы мини-БЛА не мог беспрепятственно преодолеть растяжку путанки в любом месте ее удержания в воздухе.
Расстояние между тросами 2 аэростатов d выбирается из соображений перекрытия всех пролетоопасных со стороны БЛА направлений. Число N аэростатов должно быть таким, чтобы весь коридор пролета БЛА или вся пограничная полоса, в пределах которой ожидается нарушение границы БЛА, были перекрыты. В идеальном случае аэростатных заграждений должно быть несколько, причем высота подъема рядов аэростатов должна быть различной, чтобы совместно они перекрывали как можно большую высотную область. В этом случае система контейнеров 3 со средствами обнаружения должна использоваться только во внешнем (ближайшем к базам дислокации БЛА) ряду аэростатов.
Вариант двухрядового проволочного заграждения с аэростатами изображен на фиг.2. Путанки 1-го внешнего ряда 6 имеют высоту подъема над землей h1. Путанки 2-го внутреннего ряда 7 имеют высоту подъема над землей h2. Высота подъема путанок 2-го ряда должна быть равна h2=h1+Y. Расстояние по горизонту от 1-го до 2-го ряда заграждений должно быть таким, чтобы при относительно прямолинейном полете БЛА не мог существенно изменить высоту своего движения за время пролета от 1-го ряда до 2-го ряда путанок. В этом случае общая высота заграждений для БЛА увеличивается с Y до 2Y.
Допускается вариант использования системы аэростатов без средств обнаружения с высотой подъема проволочных заграждений, ориентированной на наиболее вероятную высоту полета БЛА по опыту предыдущих несанкционированных нарушений или по данным средств обзора пространства других систем, ведомств, подразделений. Число аэростатов N определяется предусмотренным конструктивно расстоянием (базой) для одной пары d и протяженностью S коридора перекрытия N=S/d.
Предложенная система и способ противодействия имеют ограничения, связанные с возможностью расположения в зоне контроля лесополосы, линий передач и других высотных предметов, препятствующих первоначальному подъему системы с поверхности земли. Однако ниже вершин деревьев лесополосы БЛА пролетать не может, и систему можно располагать в глубине зоны контроля по оконечностям лесного массива. В этом случае протяженность линии перекрытия может увеличиться. В случае нехватки числа N аэростатов систему целесообразно вытягивать в линию, отодвинутую от неровностей окончания лесного массива в глубину контролируемой территории.
Сущность способа противодействия выполнению задач БЛА заключается в том, что БЛА-нарушитель всегда движется по запланированному маршруту, используя навигационную или инерционную систему ориентирования, и не контролирует состояние воздушного пространства на пути следования. Как правило, БЛА является легким аппаратом с небольшой тягой двигательной установки, вследствие чего, попадая в области, занятые путанками (запутанными проволочными заграждениями), БЛА не может их преодолеть, запутывается и теряет управляемость. В результате задача БЛА по разведке объектов, вскрытию позиций, наведению оружия и т.п. оказывается невыполненной, что и является целью предложенного способа противодействия. При очередном опускании аэростатов 1 области путанок на земле осматриваются, и все задержанные БЛА извлекаются для доказательства факта несанкционированного нарушения границ или съема разведывательной информации.
Преимуществами способа и системы являются возможность использования его в любых погодных условиях при любых изломах складок местности (например, в горных районах), относительная дешевизна, постоянство функционирования в течение длительного времени.
Источники информации
1. http://vpvo.narod.ru/Weapon/Zrk/Tunguskam/tunguskam.html (ЗПРК «Тунгуска-М») - аналог.
2. http://www.snariad.ru/pvo/панцирь/ (Военный портал. ЗПРК Панцирь-С1).
3. http://www.snariad.ru/2008/11/13/nasams/ (Испанцы опробовали норвежские ЗРК).
4. http://www.rusarmy.com/pvo/pvo_vsk/zrs_tor.html (Автономная войсковая зенитная ракетная система "Тор").
5. Василин Н.Я., Гуринович А.Л. Зенитные ракетные комплексы. Минск: ООО «Попурри», 2002. 464 с.
6. http://topwar.ru/9353-unikalnyy-zenitnyy-kompleks-buk-2m-srednev-dalnosti.html (Уникальный зенитный комплекс средней дальности "Бук-2М").
7. http://vpvo.narod.ru/Weapon/Zrk/Bukml/bukml.html (ЗРК "Бук-МГ).
8. http://www.uav.ru/articles/pvo_vs_uav.pdf (Аминов С. ПВО в борьбе с БЛА).
9. Лазер против БЛА // Воздушно-космическая оборона. №2, 2009, С.91 (аналог).
10. Безверхий А.В., Будур О.Н. и др. Формулировка задачи функционального поражения противорадиолокационных ракет с использованием электромагнитного оружия. Наука и техника Воздушных Сил Вооруженных Сил Украины. №1(5), 2011. С.146-150 (аналог).
11. Патент РФ №2148266. Способ функционального поражения полупроводниковых радиоэлектронных средств и устройство его реализации. МПК G 01 S 7/38. Диденко А.Н., Жерлицын А.Г., Фортов В.Е., Юшков Ю.Г. Заявка №98122470/09 от 10.12.1998. Опубл. 27.04.2000.
12. http://www.iaroslaff.net/modules.php?name=News&file=view&news_id=15004 (Радиоэлектронное противодействие БЛА) - прототип.
13. http://metizy-94.com.ua/home/putanka.html.
Изобретение относится к оборонительным сооружениям. Способ противодействия выполнению задач беспилотным летательным аппаратом характеризуется использованием системы из аэростатов, закрепленных тросами к земной поверхности, проволочных заграждений - путанок, которые растягивают между аэростатами на каркасах, средств радиолокационного и оптического обзора пространства, которые соединяют с пунктом обработки информации и управления с помощью проводных линий передачи. Закрепляют тросы аэростатов на земле с помощью контейнеров с редукторами, позволяющими изменять высоту подъема аэростата путем наматывания-разматывания троса. Изобретение направлено на повышение противодействия беспилотным летательным аппаратам. 2 ил.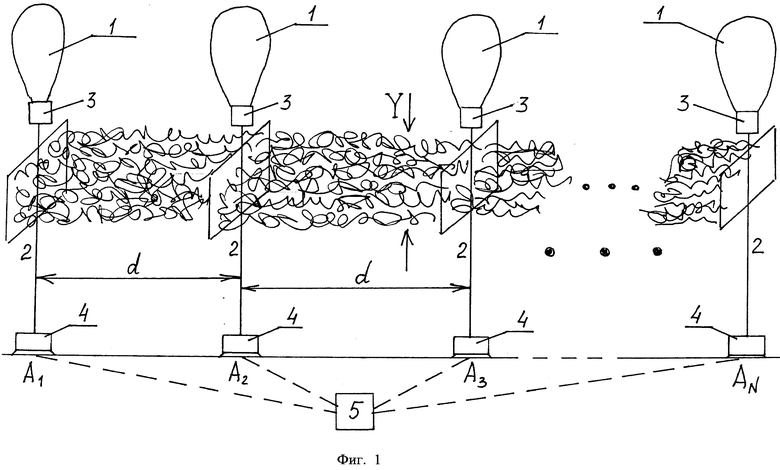
Способ противодействия выполнению задач беспилотным летательным аппаратом, заключающийся в том, что с помощью типовых удаленных от границ контролируемых территорий радиолокационных или оптических средств обнаружения вскрывают факт несанкционированного приближения к границам контролируемой территории чужого беспилотного летательного аппарата и с грубой точностью измеряют его угловые координаты, дальность и высоту полета, отличающийся тем, что заблаговременно на опасных направлениях ожидаемых несанкционированных пролетов вражеских беспилотных летательных аппаратов выстраивают линию из N поднятых в воздух аэростатов, прикрепленных тросами к земной поверхности вдоль линии контроля территории, причем каждый аэростат закреплен только одним своим тросом, число аэростатов N определяют по формуле N=S/d, где S - протяженность контролируемых границ с опасных направлений подлета беспилотных летательных аппаратов, d - расстояние между смежными аэростатами, между каркасами, закрепленными под аэростатами, натягивают проволочные заграждения из тонкой стальной прочной упругой запутанной проволоки, именуемые путанками, занимающими по высоте область порядка 10-20 метров, закрепляют тросы аэростатов на земле с помощью контейнеров с редукторами, позволяющими по сигналам из пункта обработки информации и управления изменять высоту подъема аэростата путем наматывания-разматывания троса, заблаговременно располагают в подвесных контейнерах аэростатов средства радиолокационного и оптического обзора пространства, соединяют эти средства обнаружения с пунктом обработки информации и управления с помощью проводных линий передачи, закрепленных внутри тросов удерживания аэростатов или с помощью радиолиний управления, включают средства обнаружения, находящиеся в подвесных контейнерах аэростатов, уточняют с помощью этих средств грубо измеренные координаты беспилотного летательного аппарата-нарушителя, полученные от сторонних удаленных радиолокационных или оптических средств обнаружения, передают уточненные данные о высоте Н полета беспилотного летательного аппарата-нарушителя на пункт обработки информации и управления, а в случае отсутствия результатов обнаружения беспилотного летательного аппарата-нарушителя средствами обнаружения, размещенными в подвесных контейнерах аэростатов, пользуются информацией о высоте полета беспилотного летательного аппарата-нарушителя от типовых, удаленных от границ контролируемой территории средств обнаружения, изменяют высоту подъема аэростатов таким образом, чтобы проволочные заграждения перекрывали высоту полета беспилотного летательного аппарата-нарушителя, с периодичностью порядка суток или по команде оператора системы противодействия выполнению задач беспилотного летательного аппарата опускают аэростаты на землю и проверяют заграждения для изъятия захваченных запутавшихся беспилотных летательных аппаратов-нарушителей.
| УСТРОЙСТВО ЗАГРАЖДЕНИЯ | 2004 |
|
RU2273818C1 |
| УСТРОЙСТВО ЗАГРАЖДЕНИЯ | 2010 |
|
RU2428649C1 |
| DE 19934950 A1, 12.10.2000 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ЕМКОСТЬ ДЛЯ ХРАНЕНИЯ СЖИЖЕННОГО ГАЗА | 2005 |
|
RU2378563C2 |
| УСТРОЙСТВО ДЛЯ ОБЛУЧЕНИЯ СВЕТОМ ГОРТАНИ И СЛИЗИСТОЙ ОБОЛОЧКИ ПОЛОСТИ РТА У ДЕТЕЙ | 2005 |
|
RU2286186C1 |

