Изобретение относится к велосипедам, а именно к приводам велосипедов с возвратно-поступательным движением ножных педалей.
Разнообразие назначения велосипедов обуславливает и разнообразие конструкций их [1].
В качестве аналогов можно представить конструкции приводов, предлагаемых патентами [6, 7, 8, 9, 10, 11]. Недостатком такого технического решения являются сложные и дорогие механизмы приводов, предлагаемых патентами [6, 7, 8]. Патент RU 2267672 С2 предлагает расчет параметров дезаксиального кривошипно-ползунного механизма, в пределах которых выявлены ранее неизвестные для него положительные свойства. Результат - повышение эффективности механизма во всех сферах применения его. Патент US 6173981 В1 предлагает механизм педального привода повозки с рычагами, тягами, тремя цепными передачами и двумя муфтами, позволяет нажатием на одну или две педали приводить повозку в движение. Такой механизм сложный, дорогой, объемный, не эффективно использовать для велосипеда. Патент SU 1747775 А1 предлагает способы уравновешивания моментов инерции дезаксиального кривошипно-ползунного механизма, и не предлагает использовать для привода велосипеда.
Наиболее близким по технической сути, или прототипом, является привод скутера [12]. Привод с кулисным механизмом простой в исполнении, значит не дорогой, обеспечивает ПРИМЕРНО (по радиусу) возвратно-поступательное движение педалей механизма, а в переходной зоне смены педали, нажатие на две педали приводить велосипед в движение
Задачей изобретения является сохранить все достоинства прототипа, как простота в исполнении, низкая стоимость, возможность обеспечить движение велосипеда только нажатием на педали, а в переходной зоне смены педали нажатие на две педали должно приводить велосипед в движение, дополнительно обеспечить ТОЧНО возвратно-поступательное движение педалей, что повысит возможности велосипедиста, но не предлагает ни один из патентов [6, 7, 8, 9, 10, 11, 12,].
Указанный технический результат достигается тем, что заявляемый привод велосипеда имеет дезаксиальный кривошипно-ползунный механизм, где при прямом ходе угол поворота кривошипа более 180 градусов, что используется для рабочего хода педали. Следовательно, две оппозитные педали на ползунах при возвратно-поступательном движении будут иметь зону совместного действия при рабочем ходе. Педали двигаются по направляющим, обеспечивая точно возвратно- поступательное движение.
Сопоставимый анализ с прототипом позволяет сделать вывод, что заявляемый ПРИВОД ВЕЛОСИПЕДА С ДЕЗАКСИАЛЬНЫМ КРИВОШИПНО-ПОЛЗУННЫМ МЕХАНИЗМОМ будет эффективнее привода прототипа. Автору не известна подобная конструкция привода велосипеда имеющего в своей конструкции дезаксиальный кривошипно-ползунный механизм. Следовательно, заявляемое решение соответствует критерию «новизна».
Сравнение заявляемого решения с прототипом позволило выявить в нем признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию «Изобретательский уровень».
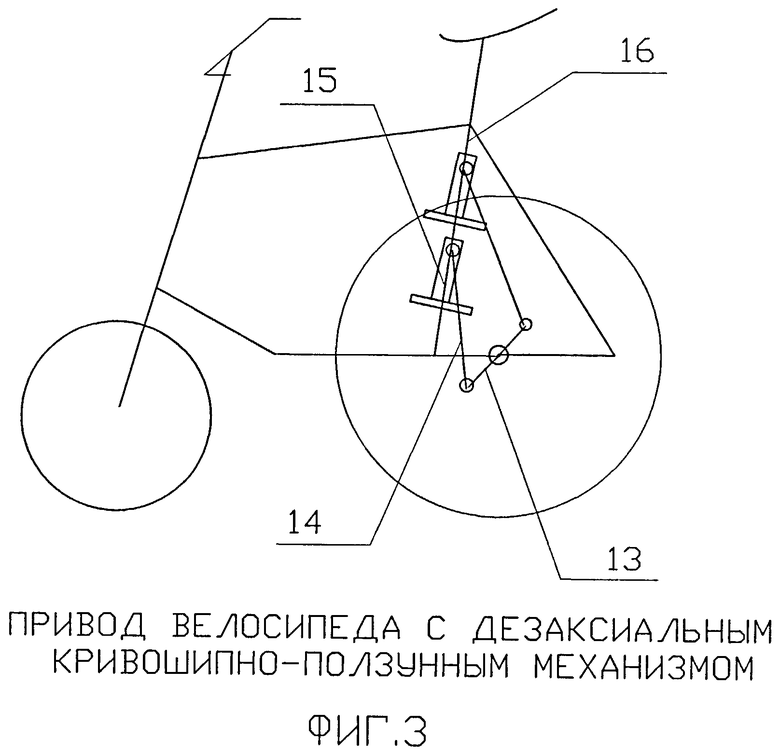
Сущность технического решения подтверждается чертежами (фиг.2, фиг.3). На фиг.2 представлен один из вариантов конструкции велосипеда с цепной передачей и дезаксиальным кривошипно-ползунным механизмом привода, где ведущая звездочка 7 цепной передачи с кривошипом 8, ведомая звездочка 9 цепной передачи, шатун 11, ползун-педаль 12, направляющая ползуна-педали 10. Заявляемый привод велосипеда имеет дезаксиальный кривошипно-ползунный механизм, у которого при прямом ходе ползуна-педали угол поворота кривошипа более 180 градусов [4, стр.195-199]. На фиг.3 представлен один из вариантов конструкции велосипеда без цепной передачи с дезаксиальным кривошипно-ползунным механизмом привода, где кривошип 13, шатун 14, ползун-педаль 15, направляющая ползуна-педали 16. Заявляемый привод велосипеда имеет дезаксиальный кривошипно-ползунный механизм, у которого при прямом ходе ползуна-педали угол поворота кривошипа более 180 градусов.
Следовательно, при возвратно-поступательном движении и любом положении оппозитных ползунов-педалей нажатие на одного из них приводит велосипед в движение, а зона перехода действия от одного ползуна-педали к другому является зоной их совместного действия.
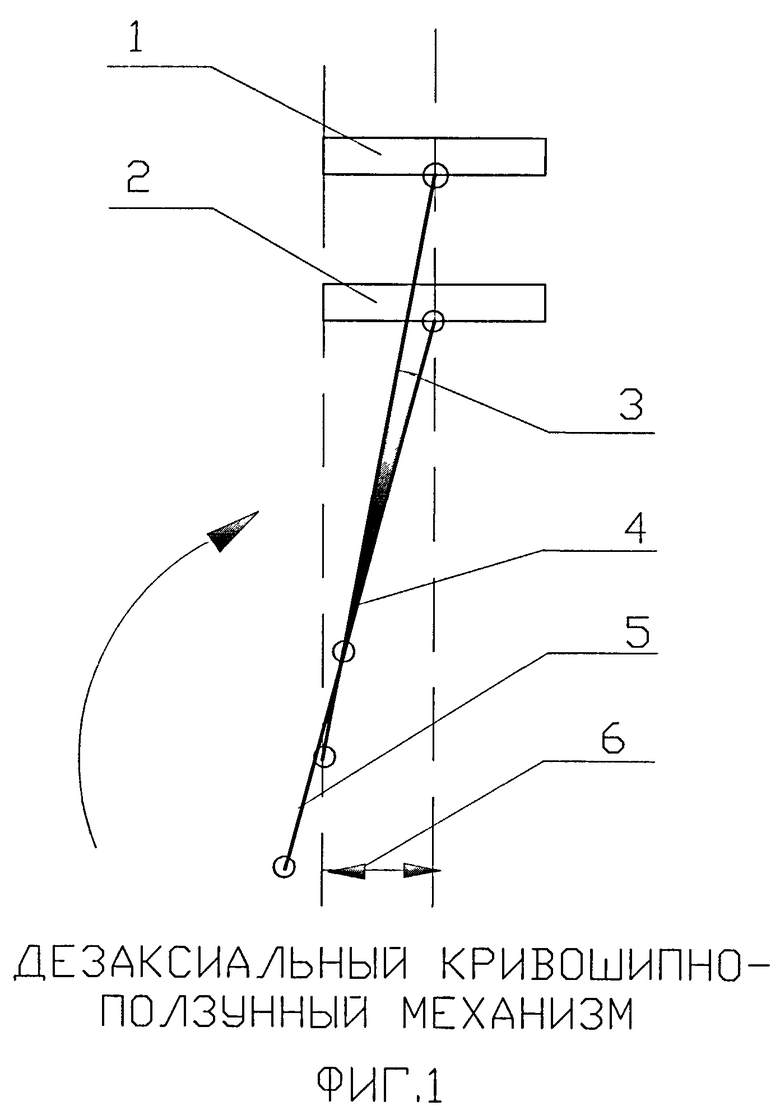
Для понимания сущности технического решения предлагаемого автором приведу подробное описание дезаксиального кривошипно-ползунного механизма и заявляемого велосипеда с ним (фиг.1, фиг.2, фиг.3). На фиг.1 представлен дезаксиальный кривошипно-ползунный механизм [4, стр.195-199] с эксцентриситетом 6, где ползун 1 в положении верхней мертвой точки, а ползун 2 в положении нижней мертвой точки, шатун 4, кривошип 5. При прямом ходе угол поворота кривошипа больше 180 градусов на угол 3, а обратном на тот же угол меньше. Величина угла 3 зависит от соотношения длин радиуса кривошипа, шатуна и эксцентриситета. Каждый из двух оппозитных ползунов-педалей велосипеда имеет свой дезаксиальный кривошипно-ползунный механизм. Следовательно, при точно возвратно-поступательном движении два оппозитных ползуна-педали имеют совместную зону действия равную углу 3, где нажатие на два ползуна-педали приводят велосипед в движение, если прямой ход кривошипно-ползунного механизма используется для движения, а обратный для возврата ползуна-педали велосипеда. На фиг.2 представлен один из вариантов конструкции велосипеда с цепной передачей и дезаксиальным кривошипно-ползунным механизмом привода, где ведущая звездочка 7 цепной передачи с кривошипом 8, ведомая звездочка 9 цепной передачи, шатун 11, ползун-педаль 12, направляющая ползуна-педали 10. Заявляемый привод велосипеда имеет дезаксиальный кривошипно-ползунный механизм, у которого при прямом ходе ползуна-педали угол поворота кривошипа более 180 градусов. На фиг.3 представлен один из вариантов конструкции велосипеда без цепной передачи с дезаксиальным кривошипно-ползунным механизмом привода, где кривошип 13, шатун 14, ползун-педаль 15, направляющая ползуна-педали 16. Заявляемый привод велосипеда имеет дезаксиальный кривошипно-ползунный механизм, у которого при прямом ходе ползуна-педали угол поворота кривошипа более 180 градусов.
Следовательно, при точно возвратно-поступательном движении и любом положении оппозитных ползунов-педалей нажатие на одного из них приводит велосипед в движение, а зона перехода действия от одного ползуна-педали к другому является зоной их совместного действия.
ПРИВОД ВЕЛОСИПЕДА С ДЕЗАКСИАЛЬНЫМ КРИВОШИПНО-ПОЛЗУННЫМ МЕХАНИЗМОМ может использоваться совместно с классической конструкцией велосипеда [1] и с конструкциями велосипедов, предложенными патентами [2, 3, 4, 5]. Заявляемый привод велосипеда может использоваться в конструкции других транспортных средств, движимых мускульной силой человека и тренажерах. Заявляемый привод велосипеда проще, надежнее, дешевле, чем приводы предлагаемые аналогами [6, 7, 8, 10]. ПРИВОД ВЕЛОСИПЕДА С ДЕЗАКСИАЛЬНЫМ КРИВОШИПНО-ПОЛЗУННЫМ МЕХАНИЗМОМ эффективнее привода велосипеда прототипа, повышает возможности велосипедиста, сделает велосипед привлекательнее для потребителя, что сделает производство велосипедов с ним экономически эффективным.
Литература
1. Большая Российская энциклопедия М.: Научное издательство Большая Российская энциклопедия. Т.5. 2006. 782. с. с.65-66.
2. Скаржинский А.И. МПК В62М 3/00 В62М 3/08 В62K 13/06 В62K 27/12 В62K 15/00 В60В 1/10 RU 2373101 С2. Велосипед (варианты), колесо велосипеда, привод велосипеда, рычажный механизм велосипеда, педальный механизм велосипеда и комплект, содержащий велосипед и прицеп.
3. Леонов А.Г. МПК В62K 17/00 RU 83233 U1 Велосипед.
4. Прохоров В.В. МПК В62K 7/00 RU 17509 U1. Многоместный реконфигурируемый модульный разборный велосипед и устройство для преобразования одноместного велосипеда в многоместный.
5. Пыжик Ю.Н. МПК F16H 55/30 RU 6210 U1 Привод велосипеда.
6. Хасанов P.M. МПК В62М 1/04 RU 6178 U1. Привод велосипеда с возвратно-поступательным движением педалей.
7. Шлыгин В.В. МПК А63В 23/04 RU 99719 U1. Привод велотренажера или велосипеда.
8. Шлыгин В.В. МПК А63В 23/04 RU 60374 U1. Привод велотренажера или велосипеда.
9. М.О. Яримов. Патент RU 2267672 С2 от 10.01.2006 г.
10. Патент US 6173981 В1 от 16.01.2001 г.
11. В.И. Доронин и др. Патент SU 1747775 А1 от. 29.12.1992 г.
12. Патент KR 200446184 Y1 от 10.23.2009 г.
Изобретение к приводам велосипедов с возвратно-поступательным движением ножных педалей. Привод велосипеда с дезаксиальным кривошипно-ползунным механизмом содержит ведущую звездочку, цепную передачу с кривошипом, ведомую звездочку, ползун (педаль) с направляющей, шатун. При прямом ходе ползуна-педали угол поворота кривошипа более 180 градусов. При возвратно-поступательном движении и любом положении оппозитных ползунов-педалей нажатие на одну из них приводит велосипед в движение, а зона перехода действия от одного ползуна-педали к другому является зоной их совместного действия. Достигается расширение функциональных возможностей велосипеда за счет обеспечения движения при нажатии на две педали одновременно. 3 ил.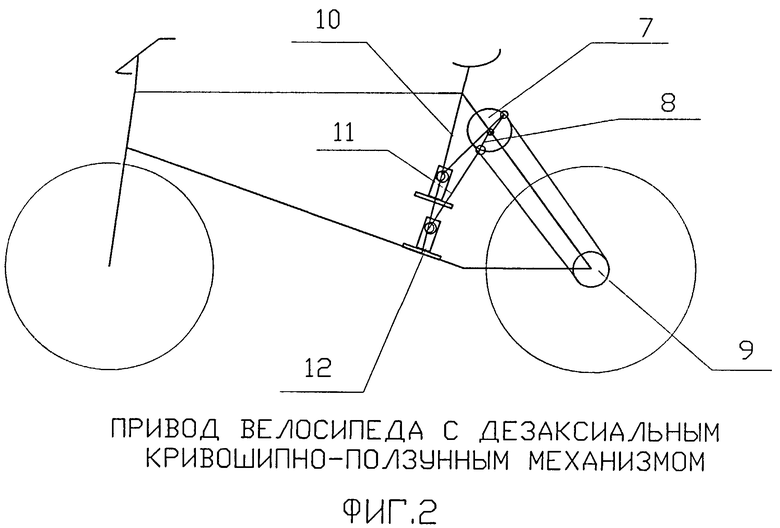
Привод велосипеда с дезаксиальным кривошипно-ползунным механизмом, отличающийся тем, что применение дезаксиального кривошипно-ползунного механизма обеспечивает точно возвратно-поступательное движение оппозитных ползунов-педалей и, в любом положении их, нажатие на одну из них приводит велосипед в движение, а зона перехода действия от одного ползуна-педали к другому является зоной их совместного действия.
| ДЕЗАКСИАЛЬНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ЯРИМОВА | 2002 |
|
RU2267672C2 |
| US 6173981 B1, 16.01.2001 | |||
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |

