Изобретение относится к уравновешиванию машинных агрегатов и может быть использовано для исключения вибраций, передающихся на фундамент машинного агрегата от шарнирно-стержневого передаточного механизма с ведущим звеном, вращающимся с постоянной угловой скоростью.
В состав машинного агрегата входят двигатель, передаточный механизм и исполнительный орган. Неуравновешенный шар- нирно-стержневой передаточный механизм является основным источником возбуждения вибраций.Чтобы передаточный механизм не являлся источником возбуждения вибраций, его нужно уравновесить, Условием уравновешивания шарнирно-стержневого передаточного механизма является равенство нулю главного вектора и главного момента сил инерции звеньев механизма, Величины главного вектора и главного момента сил инерции представляют собой спожные периодические функции, которые можно представить в виде бесконечных гармонических рядов.
Известен деззксиальный кривошипно- полз, нный механизм, содержащий стойку с прямолинейной направляющей, кривошип, шатун, потзун и шарнирно-рычажное уравновешивающее устройство. Кривошип шар- нирно закреплен на стойке. Пользуя установлен в прямолинейной направляющей. Шатун своими концами шарнирно связан с кривошипом и ползуном. Прямая линчя перемещения шарнира, соединяющего ползун и шатун, не проходит через опорный шарнир кривошипа Кратчайшее расстояние от опорного шарнира кривошипа по линии перемещения шарнира ползунз есть дезаксиал. Шэрнирно- рычажное уравновешивающее устройство выполнено в виде двух стержней. Стержни одними концами через общий шарнир связат ы между собой, а другими концами шарнирно связаны с кривошипом и стойкой так, что получается шарнирно-стержневой контур в виде параллелограмма.
Параметры кривошипа, шатуна, ползуна и стержней уравновешивающего устройства выбраны так, чтобы при равномерном вращении кривошипа обеспечивалось равенство нулю главного вектора сил инерции, а в главном моменте сил инерции отсутствовала первая гармоника Вторая и последующие гармоники главного момента остаются неуравновешенными 1 Таким образом, недостатком известного дезаксиального кривошипчо- олзунного механизма является неуравновешенность второй и последующих гармоник главного момента сил инерции звеньев механизма Наличие второй и последующих гармоник
приводит к тому, что на фундамент машины передаются от механизма периодически изменяющиеся динамические нагрузки
Наиболее близким к предлагаемому
изобретению по технической сущности является кривошипно-ползунный механизм, содержащий стойку с прямолинейной направляющей, двуплечий кривошип, шатун, ползуны и коромысло Шатун своими конце0 выми шарнирами связан с первым плечом кривсшипа и ползуном. Ползун установлен в прямолинейной направляющей Кривошип и коромысло шарнирами связаны со стойкой Второй ползун шарниром связан с
5 вторым плечом кривошипа и установлен на коромысле с возможностью перемещения вдоль него. Продольные оси плеч кривошипа совпадают.
Используя известные методы статиче0 ского уравновешивания механизмов, можно подобрать такие параметры геометрии масс звеньев указанного механизма, что главный вектор сил инерции будет равен нулю; равенство же главпого момента сил
5 инеоции обеспечить в этом механизме нельзя
Таким образом, недостатком известного кривош ипно-по/пунного механизма является его моментная неуравновешенность.
0 Кяк следствие отого, механизм будет источником вибраций фундамента машины. Наличие вибраций фундамента является одним из основных факторов, влияющих на уменьшение надежности и долговечности
5 механизма при его работе.
Цель изобретения - повышение надежности и долговечности дезаксиального кри- вошипно-шатунного механизма при его работе за счет уравновешивания главного
0 момента сил инерции звеньев механизма
Для достижения поставленной цели в деза к спальном кривошипно-ползунном механизме, содержащем стойку с прямолинейной направляющей, шарнирно уста5 новленные на стойке двуплечий кривошип и коромысло, установленный в направляющей ползун, шатун, шарнирно связанный одним концом с ползуном, а другим - с плечом кривошипа, и второй ползун, установ0 ленный на втором плече кривошипа с возможностью перемещения вдоль него и шарнирно связанный с коромыслом, второе плечо кривошипа выполнено из двух частей, размещенных одна к другой под углом, рав5 нымуглу между прямолинейной направляющей и прямой, проходящей через оси шарниров, связывающих кривошип и коромысло со стойкой, контур образованный первым плечом кривошипа, шатуном, прямолинейной направляющей и перпендикуляром, опущенным к ней от оси шарнира, связывающего кривошип со стойкой, подобен контуру, образованному вторым плечом кривошипа коромыслом и прямой, проведенной через оси шарниров, связыва- ющих кривошип и коромысло со стойкой, а параметры геометрии и масс звеньев механизма определены из соотношений Syi+mift - Sy2(,
, , , , , , , ПП2 +
тз + 5у4Јз 1 0
(D
Il-Sv2t.- l2 + Sy4i3 0
где i, 1.2, (з - длины соответственно первого плеча кривошипа, шатуна и коромысла;
ггм, ГП2, тз - массы соответственно шатуна и первого и второго ползуна
5x1, 5Х2, 5x3, 5x4, 5x5 - статические моменты массы соответственно кривошипа, шатуна, первого ползуна, коромысла и второго ползуна относительно соответствующих осей х;
5У1, 5У2, 5уз, 5У4, 5У5 статические моменты массы соответственно кривошипа. шатуна, первою ползуна, коромысла и второго ползуна относительно соответствующих осей у;
И, 2 - моменты инерции массы соответственно шатуна и коромысла относительно точек пересечения продольных и поперечных осей этих звеньев
На чертеже изображена схема дезакси- ального кривошипно-ползуниого механизма
Дезаксиальный крйвошипно-ползун- ный механизм состоит из неподвижной стойки 1 с прямолинейной направляющей 2, двуплечего кривошипа 3, шатуна 4, ползунов 5 и 6 и коромыспа 7 Шатун 4 своими концевыми шарнирами 8 и 9 связан с первым плечом кривошипа 3 и ползуном 5 Пол- зун 5 установлен в прямолинейной направляющей 2, Кривошип 3 и коромысло 7 шарнирами 10 и 11 связаны со стойкой 1 Ползун 6 установлен на втором плече кривошипа 3 с возможностью перемещения вдоль него и связан шарниром 12 с коромыслом 7. Ось направляющей 2 смещена относительно шарнира 10 на дезаксиал Угол между прямолинейной направляющей 2 и прямой, проходящей через оси шарниров 10 и 12, равен углу между составными частями второго плеча кривошипа 3 Контур, образованный первым плечом ривошипа 3, шатуном 4, прямолинейной натравляющей 2 и перпендикуляром, опущенным к ней от оси шарнира 10, подобен контуру образованному прямой, проведенной через оси шарниров 10 и 11, коромыслом 7. прямоли5
10
15
20253035
4045 50 55 нейной направляющей и перпендикуляром, опущенным к ней от оси шарнира 10. При этом отношение длины первого плеча кривошипа 3 между шарнирами 8 и 10 к длине шатуна 4 между шарнирами 8 и 9 равно отношению длины отрезка прямой между осями шарниров 10 и 11 к длине коромысла 7 между шарнирами 11 и 12.
Параметры геометрии масс звеньев механизма определены из системы уравнений
0).
При конструировании механизма можно задаваться значениями любых четырех параметров из пятнадцати, входящих s систему уравнений (1).
Для получения системы уравнений (1) были записаны аналитические выражения главного момента и проекций главного вектора сил инерции звеньев механизма. Установлено, что число обобщенных инерционных параметров, входящих в эти уравнения, равно тринадцати. Из этих тринадцати обобщенных параметров десять параметров можно сделать равными нулю, которые дают первых десять уравнений в системе (1). При выполнении этих десяти уравнений главный вектор сил инерции равен нулю, а главный момент определяется оставшимися обобщенными параметрами следующим образом.
М0™ Pi #1 + Р2 $1 + Рз $з.(2)
где р1,,фз- угловые ускорения соответственно кривошипа 3, шатуна 4 и коромысла 7:
Pi, P2, Рз - обобщенные инерционные параметры
-Sy2t2; Рз 2-5у4&.
Анализ уравнения (2) показывает, что М0ИН будет равен нулю при любом значении PI, если выполняются условия
$ 0; .,(3)
фз р (4)
Р2 Рз.(5)
Условие (3) обеспечивается при равномерном вращении кривошипа 3. Условие (4) является следствием указанного подобия контуров. Выполнение условия (5) дает дополнительное уравнение связи между параметрами геометрии масс, это уравнение в(1) записано последним.
Механизм работает следующим образом.
При вращении кривошипа 3 все звенья механизма приводятся в движение. Ползун 6 перемещается вдоль направляющей второго плеча кривошипа и поворачивает коромысло 7 вокруг шарнира 11. При равномерном вращении кривошипа 3 угловое ускорение коромысла равно по величине и
противоположно по направлению угловому ускорению шатуна 4.
В выполненном таким образом механизме при равномерном вращении кривошипа обеспечивается равенство нулю главного вектора и главного момента сил инерции звеньев механизма, т.е. обеспечивается условие уравновешенности механизма. Это приводит к тому, что на фундамент машинного агрегата со стороны механизма не передаются переменные динамические нагрузки. Отсутствие этих нагрузок приводит к устранению вибраций фундамента Следствием этого является повышение надежности и долговечности механизма и всего машинного агрегата при его работе, Формула изобретения Деза «спальный кривошипно-ползун- ный механизм, содержащий стойку с прямо- яинейной направляющей, шарнирно установпенные на стойке двуплечий кривошип и коромысло, установленный в направляющей ползун шатун, шарнирно связанный одним концом с ползуном, з доу- гим - с плечом кривошипа, и второй почзун, устан елейный на втором плече кривошипа с зозможностью перемещения вдоль него и .. рнирно связанный с коромыслом, отличающийся тем, что, с целью повышения s цежностим долговечности за счетуравно- вгш ивания главного момента сил инерции звеньев механизма, второе плечо кривошипа выполнено из двух частей, размещеннь1х„ одна к другой под углом, равным углу между прямолинейной направляющей и прямой, проходящей через оси шарниров, связывающих кривошип и коромысло со стойками, контур, образованный первым плечом кривошипа, шатуном, прямолинейной направляющей и перпендикуляром, опущенным к
ней от оси шарнира, связывающего кривошип со стойкой, подобен контуру, образованному вторым плечом кривошипа, коромыслом и прямой, проведенной через оси шарниров, связывающих кривошип и
коромысло со стойкой, а параметры геометрии и масс звеньев механизма определены из соотношений
Syi+mifi-Sy2fif2 1 0,
ГП2 + Sy2f2 1 0,
m-з + Sy/i з 0; li-Sv2Pj.-l2 + Sy4fe 0,
где fi, (2. 13 - длины соответственно первого плеч кривошипа, шатуна и коромысла;
ггм, ГП2, тз - массы соответственно шатуна и первого и второго ползунов;
5x1, 5x2, 5x3, 5x4, 5x5 статические мо- менты массы соответственно кривошипа, шатуна, первого ползуна, коромысла и второго ползуна относительно соответствующих осей х;
Syi, 5у2, 5уз,5у4,3У5 - статические момен- з ы массы соответственно кривошипа, шатуна, первого ползуна, коромысла и второго ползуна относительно соответствующих осей у,
И, (2 - моменты инерции массы соответ ственно шатуна и коромысла относительно точек пересечения продольных vi поперечных осей этих звеньев,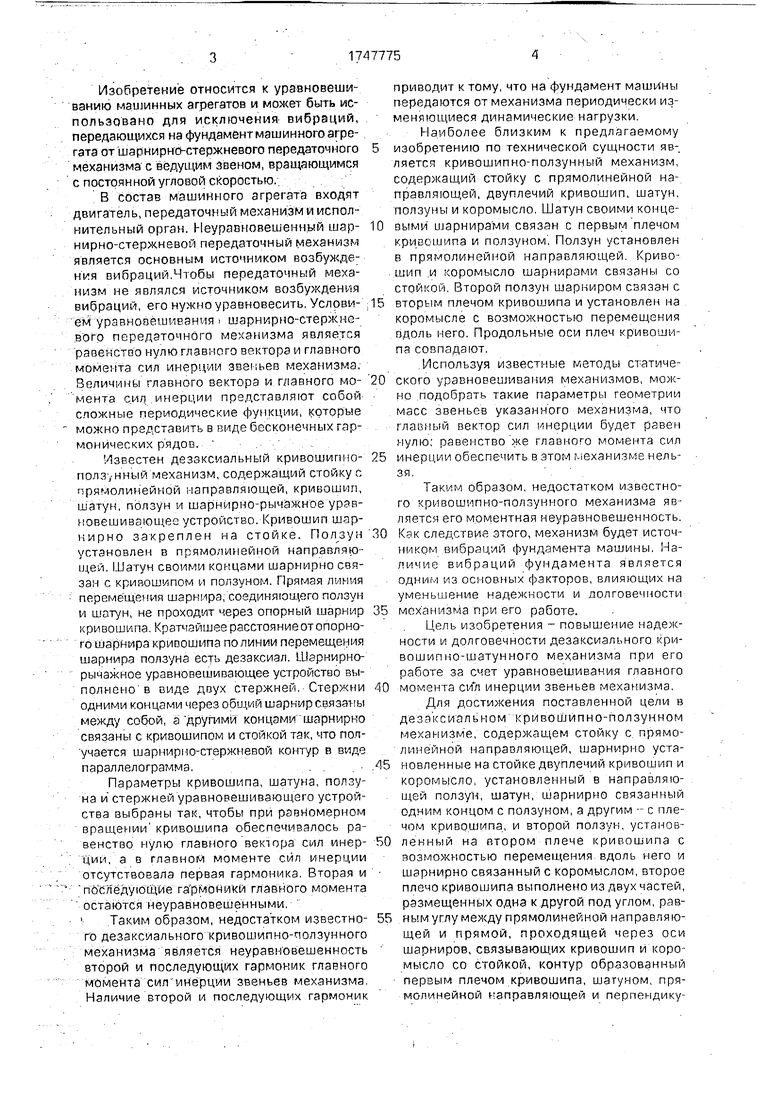
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирный четырехзвенник | 1990 |
|
SU1800170A1 |
| СДВОЕННЫЙ ПОЛЗУННО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2051303C1 |
| Шарнирный четырехзвенник | 1989 |
|
SU1724969A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| Уравновешенный шарнирный четырехзвенник | 1990 |
|
SU1805253A1 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 1994 |
|
RU2087779C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| Уравновешенный кривошипно-ползунный механизм | 1988 |
|
SU1627769A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1995 |
|
RU2085791C1 |
| Высадочный автомат | 1989 |
|
SU1701417A1 |