Предлагаемое изобретение относится к измерительной технике и может быть использовано при измерении давления жидких и газообразных сред.
Известны способы измерения давления с использованием тензорезисторного датчика давления и устройства для измерения давления [1, 2], в которых в качестве терморезисторного датчика температуры применяют терморезистор или питающую диагональ моста тензорезисторного преобразователя, тензорезисторный преобразователь выполняют в виде нано- и микроэлектромеханической системы (НиМЭМС) [3, 4], а преобразование напряжения в измеряемое давление производят с помощью полиномиальных функций одной или двух переменных.
Недостатком таких способов и устройств является невысокая точность измерения, обусловленная погрешностью, возникающей из-за использования для аппроксимации функций преобразования (функций преобразования напряжений питающей и измерительной диагоналей мостовой схемы в измеряемое давление) полиномиальных функций невысоких степеней.
Наиболее близким по технической сущности к предлагаемому решению является, выбранный в качестве прототипа, способ измерения давления и тензорезисторный датчик давления на его основе [5]. Он заключается в том, что воздействие измеряемого давления преобразуется в изменение сопротивлений тензорезисторного преобразователя (тензорезисторной НиМЭМС), подключенного к источнику тока, измерении напряжений в измерительной и питающей диагоналях мостовой измерительной цепи и преобразовании измеренных значений напряжений в давление с помощью полинома третьей степени, коэффициенты которого рассчитываются и записываются в постоянное запоминающее устройство на этапе калибровки.
Датчик давления, реализующий такой способ, содержит тензорезисторный преобразователь давления (НиМЭМС) с мостовой измерительной цепью из тензорезисторов, питающая диагональ которой подключена к источнику тока и к аналого-цифровому преобразователю (АЦП), измерительная диагональ мостовой измерительной цепи тоже подключена к аналого-цифровому преобразователю. Имеется вычислительное устройство в виде микроконтроллера, соединенное с аналого-цифровым преобразователем, постоянным запоминающим устройством (ПЗУ) и цифровым интерфейсом, выход которого является выходом датчика. В качестве терморезисторного датчика температуры используется питающая диагональ моста тензорезисторного преобразователя давления (тензорезисторной НиМЭМС). В процессе калибровки датчика осуществляется регистрация сигналов, соответствующих напряжениям в измерительной и питающей диагоналях моста при контрольных значениях давления и температуры. Производится расчет полиномиальных коэффициентов аппроксимирующей функции преобразования и сохранение их в постоянное запоминающее устройство.
Недостатком известного способа является присутствие погрешности, обусловленной тем, что для аппроксимации функции преобразования напряжений питающей и измерительной диагоналей моста в измеряемое давление используется полином третьей степени. Результаты аппроксимации функций двух переменных полиномиальными выражениями невысоких степеней при относительно большом количестве контрольных точек часто получаются неудовлетворительными. Увеличение же степени многочлена приводит к возникновению осцилляции интерполяционной кривой, что не соответствует реальной зависимости. Более того, значение давления, вычисленное с помощью полинома, даже в контрольной точке в общем случае не совпадает с исходным контрольным значением. Кроме того, калибровка таких датчиков не технологична, в связи с необходимостью задания точных значений давления в контрольных точках, что требует большого количества времени, особенно в автоматических системах задания давления.
Задачей предлагаемого изобретения является повышение точности измерения давления и технологичности за счет использования бигармонической сплайн интерполяции функции преобразования нескольких переменных по контрольным точкам и проведения большей части вычислений на этапе калибровки.
Техническим результатом изобретения является повышение точности измерения давления и технологичности за счет использования бигармонической сплайн интерполяции функции преобразования нескольких переменных по контрольным точкам и проведения большей части вычислений на этапе калибровки, за счет уменьшения погрешности, возникающей из-за аппроксимации функции преобразования напряжений питающей, измерительной диагоналей моста и значений величин, зависящих от дестабилизирующих факторов, в измеряемое давление, и полностью исключения ее в контрольных точках.
Это достигается тем, что в способе измерения давления с использованием тензорезисторного датчика давления на основе нано- и микроэлектромеханической системы (НиМЭМС), содержащей мостовую измерительную цепь из тензорезисторов, заключающемся в том, что питающую диагональ мостовой измерительной цепи подключают к источнику постоянного тока и регистрируют напряжения на питающей и измерительной диагоналях мостовой измерительной цепи, подают давление, вначале в режиме калибровки, а затем в режиме измерения, причем в режиме калибровки осуществляют регистрацию данных напряжений на питающей и измерительной диагоналях мостовой измерительной цепи, а в режиме измерения осуществляют вычисление измеренного давления по текущим данным напряжений на питающей и измерительной диагоналях мостовой измерительной цепи и данным, зарегистрированным в режиме калибровки, в соответствии с предлагаемым изобретением, в режиме измерения значение измеренного давления Pi вычисляется путем бигармонической сплайн интерполяции функции преобразования нескольких переменных по контрольным точкам, исходя из сохраненного на этапе калибровки вектор-столбца W(Pэ, Uiz, Upt, X1…Xn) и полученного на этапе измерения давления вектор-столбца G(Ui, Up, Uiz, Upt, X1…Xn, Y1…Yn) по формуле

где Pэ - эталонное давление; Uiz, Upt - вектор-столбцы напряжений измерительной и питающей диагоналей в контрольных точках; X1…Xn - вектор-столбцы значений величин, зависящих от дестабилизирующих факторов в контрольных точках; U1, Up - значения напряжений измерительной и питающей диагоналей в момент измерения давления; Y1…Yn - значения величин, зависящих от дестабилизирующих факторов, в момент измерения давления; GT - транспонированный вектор-столбец G, элементы которого определяются в зависимости от количества переменных функции преобразования; символ «×» обозначает матричное произведение.
Калибровку для измерения давления осуществляют путем регистрации напряжений измерительной Uiz и питающей Upt диагоналей мостовой измерительной цепи и значений величин X1…Xn, зависящих от дестабилизирующих факторов, при установленных контрольных значениях эталонных давления Pэ, температуры, дестабилизирующих факторов и записи вектор-столбцов Uiz, Upt, X1…Xn в постоянное запоминающее устройство датчика для установления соотношения между выходным сигналом датчика и значениями давления Pi, соответствующими значениям величин, воспроизводимых при эталоном давлении Pэ, в соответствии с предлагаемым изобретением, на основе значений Pэ, Uiz, Upt, X1…Xn в контрольных точках вычисляют и записывают в постоянное запоминающее устройство датчика вектор-столбец W, который рассчитывают по формуле

где P - вектор-столбец эталонных значений давления в контрольных точках; g - матрица, элементы которой определяются в зависимости от количества переменных функции преобразования; g-1 - матрица, обратная к g.
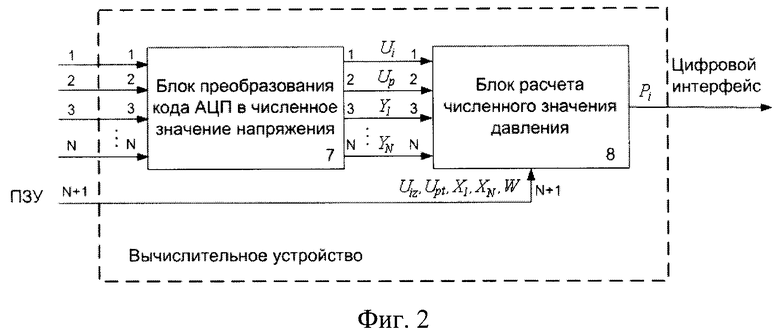
Датчик давления на основе НиМЭМС, реализующий предлагаемые способы измерения и калибровки, содержащий тензорезисторный преобразователь давления (ТПД) в виде НиМЭМС, аналого-цифровой преобразователь (АЦП), вычислительное устройство (ВУ), содержащее блок преобразования кода АЦП в численное значение напряжения и блок расчета численного значения давления, постоянное запоминающее устройство (ПЗУ), цифровой интерфейс (ЦИ), причем первый вход АЦП подключен к питающей диагонали мостовой измерительной цепи ТПД, второй вход АЦП подключен к измерительной диагонали мостовой измерительной цепи ТПД, выходы АЦП соединены со входами ВУ, (N+1)-й вход которого соединен с ПЗУ, а выход соединен с ЦИ, в соответствии с предлагаемым изобретением, дополнительно введены сенсоры, чувствительные к дестабилизирующим факторам, влияющим на датчик давления, выходы которых являются выходами с 3 по N ТПД, при этом эти выходы подключены к входам с 3 по N АЦП, выходы последнего соединены с входами блока преобразования кода АЦП в численное значение напряжения, выходы которого соединены с входами с 1 по N блока расчета численного значения давления, (N+1)-й вход которого соединен с ПЗУ, а выход является выходом ВУ, при этом в блоке расчета численного значения давления измеренное давление Pi определяется по формуле Pi=GT×W, где GT - транспонированный вектор-столбец G, элементы которого определены в зависимости от количества переменных функции преобразования (числа N); символ «×» обозначает матричное произведение, а W - вектор-столбец, элементы которого определены по формуле W=g-1×P, где P - вектор-столбец эталонных значений давления в контрольных точках; g - матрица, элементы которой определены в зависимости от количества переменных функции преобразования (числа N); g-1 - матрица, обратная к g.
На фиг.1 изображена структурная схема предлагаемого датчика давления на основе НиМЭМС, реализующая предлагаемые способ измерения и способ калибровки. На фиг.2 приведена структурная схема вычислительного устройства.
Датчик давления на основе НиМЭМС, реализующий предлагаемые способы измерения и калибровки содержит источник тока 1, тензорезисторный преобразователь давления 2, аналого-цифровой преобразователь 3, вычислительное устройство 4, цифровой интерфейс 5, постоянное запоминающее устройство 6. Вычислительное устройство 4 включает в себя блок 7 преобразования кода АЦП в численное значение напряжения, блок 8 расчета численного значения давления.
Датчик давления работает следующим образом. Тензорезисторный преобразователь давления (ТПД) 2 питается от источника постоянного тока 1 (фиг.1). В результате воздействия давления возникают деформации тензорезисторов, включенных в мостовую измерительную цепь НиМЭМС 2. Напряжение Up питающей диагонали поступает на первый выход ТПД. Напряжение Ui измерительной диагонали моста зависит от температуры ТПД 2 и поступает на его второй выход.
Выходы сенсоров, чувствительных к дестабилизирующим факторам, являются выходами с 3 по N ТПД. В качестве сенсоров могут быть датчики вакуума, вибрации, ионизирующего излучения и т.п. Выходы ТПД 2 соединены со входами АЦП 3, выходы которого соединены со входами с 1 по N вычислительного устройства 4, являющиеся также входами с 1 по N блока 7 преобразования кода АЦП в численное значение напряжения. (N+1)-й вход ВУ соединен с ПЗУ. Вычисленные блоком 7 численные значения напряжений питающей Up, измерительной Up диагоналей и величин Y1…Yn, зависящих от дестабилизирующих факторов, подаются в блок 8 расчета численного значения давления, который вычисляет численное значение Pi измеренного давления. Вычисленное численное значение давления подается на вход цифрового интерфейса 5, формирующего выходной сигнал датчика.
Для расчета численного значения давления на основе величин Up, Ui, Y1…Yn в блоке 8 (расчета численного значения давления) используется выражение (1) и сохраненные в постоянное запоминающее устройство 6 на этапе калибровки датчика вектор-столбцы Uiz, Upt, X1…Xn, W.
Калибровка осуществляется путем регистрации напряжений измерительной Uiz, питающей Upt диагоналей мостовой измерительной схемы и значений величин X1…Xn, зависящих от дестабилизирующих факторов, при установленных контрольных значениях эталонных давления Pэ, температуры, дестабилизирующих факторов и записи вектор-столбцов напряжений Uiz, Upt, X1…Xn и вычисленного по формуле (2) вектор-столбца W в постоянное запоминающее устройство 6 датчика.
Процесс вычисления вектор-столбца W в процессе калибровки и работу блока расчета численного значения давления при измерении давления рассмотрим на примере для случая, когда функция преобразования зависит только от двух переменных (Uiz, Upt) в отсутствии других дестабилизирующих величин, то есть при N=2.
Исходными данными для вычисления вектор-столбца W в процессе калибровки являются:
- количество контрольных точек Num (в данном примере Num=10);
- значения Pэ, Uiz и Upt в контрольных точках.
Значения Pэ, Uiz и Upt, рассматриваемые в примере, приведены в таблице 1.
Для вычисления вектор-столбца W на этапе калибровки предварительно производится расчет матрицы g размером Num×Num. В рассматриваемом случае при N=2 элементы данной матрицы вычисляются следующим образом. Диагональные элементы (i=j) матрицы g заполняются нулями. Остальные элементы (i≠j) вычисляются, в случае двух переменных, по формуле (3):

где i, j=1…Num - номер контрольной точки исходных данных.
Элементы матрицы g для значений исходных данных примера приведены в таблице 2.
Вектор-столбец W вычисляется исходя из вектор-столбца P данных о давлении Pэ в контрольных точках и вычисленной матрицы g по формуле (2):
W=g-1×P,
где g-1 - обратная матрица к g. Символ «×» обозначает матричное произведение.
Элементы вектор-столбца W для значений исходных данных примера приведены в таблице 3.
Значения вектор-столбцов Uiz, Upt и W сохраняются в ПЗУ на этапе калибровки.
В процессе эксплуатации датчика, при измерении давления, входными данными блока 8 расчета численного значения давления в случае отсутствия других дестабилизирующих факторов (при N=2) являются численные значения напряжений в измерительной Ui и питающей Up диагоналях. Выходным сигналом блока 8 является численное значение измеряемого давления Pi. В данном примере значения напряжений измерительной и питающей диагоналей при измерении давления выбраны равными Ui=3 мВ и Up=6,2 В.
Блоком 8 расчета численного значения давления вычисляются элементы вектор-столбца G, в случае двух переменных (N=2), по формуле (4):

где j=1…Num - номер элемента вектор-столбцов, сохраненных в постоянном запоминающем устройстве контрольных напряжений Uiz и Upt.
Значения элементов вектор-столбца G для значений исходных данных примера приведены в таблице 4.
Вычисление рассматриваемым блоком 8 численного значения измеряемого давления Pi производится исходя из сохраненного на этапе калибровки вектор-столбца W и вычисленного (используя исходные данные Ui, Up) значения вектор-столбца G по формуле (1)
Pi=GT×W,
где Gт - транспонированный вектор-столбец G, то есть вектор-строка. Символ «×» обозначает матричное произведение.
Для исходных значений рассмотренного примера измеренное давление равно Pi=4,641 МПа.
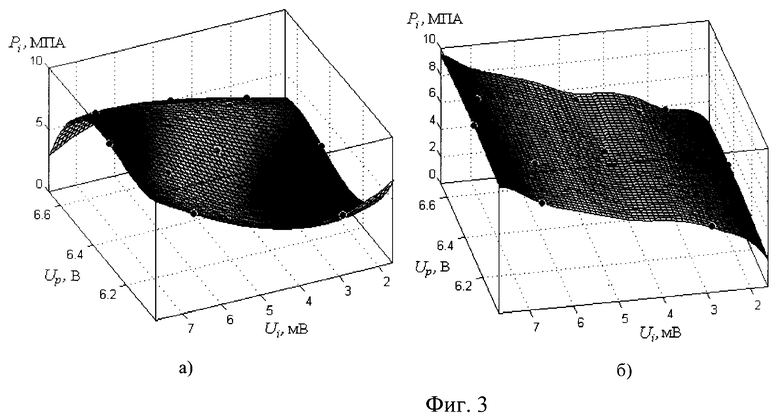
На фиг.3а показаны контрольные точки, используемые в примере, и результат их интерполяции полиномом третьей степени. На фиг.3б показан результат бигармонической сплайн-интерполяции тех же данных согласно предлагаемому изобретению. Из рисунков видны отличия интерполяционных поверхностей, полученных различными методами. Интерполяционная поверхность бигармонической сплайн-интерполяции более гладкая и в ней отсутствуют осцилляции на границах диапазона, присущие полиномиальной функции. Так из-за осцилляции на границе, при исходных данных примера (Ui=3 мВ и Up=6,2 В), полиномиальная интерполяция дает значительно заниженное значение измеренного давления Pi=2,137 МПа.
Таким образом, при использовании предложенных способа измерения давления, способа калибровки и датчика давления на основе НиМЭМС повышается точность измерения давления за счет уменьшения погрешности, возникающей из-за аппроксимации функции преобразования одной, двух, трех и более переменных по контрольным точкам, и полного исключения ее в контрольных точках. Также повышается быстродействие за счет проведения большей части вычислений на этапе калибровки, причем увеличение количества контрольных точек приводит к значительному увеличению вычислений только на этапе калибровки. Технологичность повышается в связи с отсутствием необходимости задания точных значений давления в контрольных точках на этапе калибровки.
Источники информации
1. А.с. СССР №1597623, МПИ G01L 9/04, Бюл. №37 от 07.10.90. Устройство для измерения давления / В.А.Васильев, А.И.Тихонов.
2. Патент РФ №2304762, МПК G01L 9/04, Бюл. №23 от 20.08.2007. Способ и устройство измерения давления / В.И.Садовников, А.Н.Кононов, А.Я.Аникин, В.А.Ларионов, А.Л.Шестаков.
3. Патент РФ №2398195, G01L 9/04, Бюл. №24 от 27.08.2010. Способ изготовления нано- и микроэлектромеханической системы датчика давления и датчик давления на его основе / П.С.Чернов, В.А.Васильев, Е.М.Белозубов.
4. Патент РФ 2411474 G01L 9/04, Бюл. №4 от 10.02.2011. Датчик давления повышенной точности на основе нано- и микроэлектромеханической системы с тонкопленочными тензорезисторами / П.С.Чернов, В.А.Васильев, Е.М.Белозубов.
5. Патент РФ №2300745, МПК G01L 9/04, Бюл. №16 от 10.06.2007. Устройство для измерения давления / Ю.Г.Свинолупов, В.В.Бычков.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ, СПОСОБ КАЛИБРОВКИ И ДАТЧИК ДАВЛЕНИЯ НА ОСНОВЕ НАНО- И МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ | 2012 |
|
RU2484435C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И ИНТЕЛЛЕКТУАЛЬНЫЙ ДАТЧИК ДАВЛЕНИЯ НА ЕГО ОСНОВЕ | 2012 |
|
RU2515079C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2005 |
|
RU2300745C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И КАЛИБРОВКИ НА ОСНОВЕ ТЕНЗОМОСТОВОГО ИНТЕГРАЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ ДАВЛЕНИЯ | 2015 |
|
RU2585486C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВЫСОКОСТАБИЛЬНОГО ТЕНЗОРЕЗИСТОРНОГО ДАТЧИКА ДАВЛЕНИЯ НА ОСНОВЕ ТОНКОПЛЕНОЧНОЙ НАНО- И МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ | 2015 |
|
RU2601204C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И СПОСОБ ПОДГОТОВКИ ЕГО К РАБОТЕ | 2008 |
|
RU2384824C1 |
| Устройство для измерения давления | 1988 |
|
SU1599679A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ТЕНЗОРЕЗИСТОРНОГО ДАТЧИКА ДАВЛЕНИЯ НА ОСНОВЕ ТОНКОПЛЕНОЧНОЙ НАНО- И МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ | 2012 |
|
RU2505791C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК ДАВЛЕНИЯ НА ОСНОВЕ ТОНКОПЛЕНОЧНОЙ НАНО- И МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ | 2009 |
|
RU2391640C1 |
| Датчик давления тензорезистивного типа с тонкопленочной нано- и микроэлектромеханической системой | 2017 |
|
RU2657362C1 |
Изобретение относится к измерительной технике. В способе измерения давления с использованием тензорезисторного датчика давления на основе нано- и микроэлектромеханической системы (НиМЭМС), в режиме измерения значение измеренного давления Pi вычисляют путем бигармонической сплайн интерполяции по контрольным точкам, исходя из сохраненного на этапе калибровки вектор-столбца W(Pэ, Uiz, Upt, X1…Xn) по формуле: Pi=GT×W, где GT - транспонированный вектор-столбец G; символ «×» обозначает матричное произведение. Калибровку для измерения давления осуществляют путем регистрации напряжений измерительной Uiz и питающей Upt диагоналей мостовой измерительной цепи и значений величин X1…Xn, зависящих от дестабилизирующих факторов, и записи в постоянное запоминающее устройство датчика вектор-столбца W, который рассчитывают по формуле: W=g-1×P, где P - вектор-столбец эталонных значений давления в контрольных точках; g - матрица, элементы которой определены в зависимости от количества переменных функции преобразования. Датчик давления на основе НиМЭМС, реализующий предлагаемые способы измерения и калибровки, включает в себя источник тока, тензорезисторный преобразователь давления, АЦП, вычислительное устройство, постоянное запоминающее устройство и цифровой интерфейс. При этом вычислительное устройство содержит блок преобразования кода АЦП в численное значение напряжения, блок расчета численного значения давления.
Технический результат - повышение точности измерения давления. 2 н. и 1 з.п. ф-лы, 4 ил., 4 табл.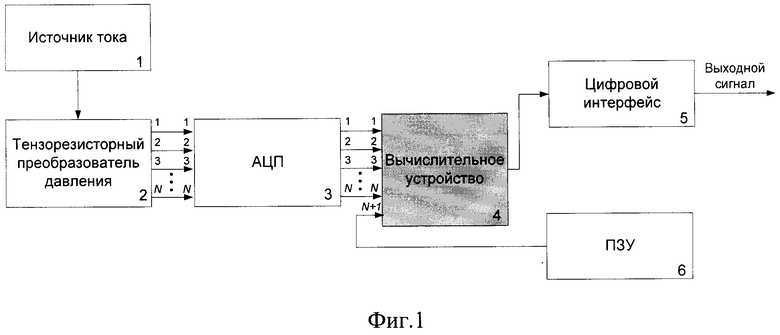
1. Способ измерения давления, калибровки с использованием тензорезисторного датчика давления на основе нано- и микроэлектромеханической системы (НиМЭМС), содержащей мостовую измерительную цепь из тензорезисторов, заключающийся в том, что питающую диагональ мостовой измерительной цепи подключают к источнику постоянного тока и регистрируют напряжения на питающей и измерительной диагоналях мостовой измерительной цепи, подают давление, вначале в режиме калибровки, а затем в режиме измерения, причем в режиме калибровки осуществляют регистрацию данных напряжений на питающей и измерительной диагоналях мостовой измерительной цепи, а в режиме измерения осуществляют вычисление измеренного давления по текущим данным напряжений на питающей и измерительной диагоналях мостовой измерительной цепи и данным, зарегистрированным в режиме калибровки, отличающийся тем, что в режиме измерения значение измеренного давления Рi вычисляется путем бигармонической сплайн интерполяции функции преобразования нескольких переменных по контрольным точкам, исходя из сохраненного на этапе калибровки вектор-столбца W(Pэ, Uiz, Upt, X1…Xn) и полученного на этапе измерения давления вектор-столбца G(Ui, Up, Uiz, Upt, X1…Xn, Y1…Yn) по формуле
Pi=GT×W,
где Pэ - эталонное давление; Uiz, Upt - вектор-столбцы напряжений измерительной и питающей диагоналей в контрольных точках; X1…Xn - вектор-столбцы значений величин, зависящих от дестабилизирующих факторов в контрольных точках; Ui, Up - значения напряжений измерительной и питающей диагоналей в момент измерения давления; Y1…Yn - значения величин, зависящих от дестабилизирующих факторов, в момент измерения давления; GT - транспонированный вектор-столбец G, элементы которого определяются в зависимости от количества переменных функции преобразования; символ «×» обозначает матричное произведение.
2. Способ по п.1, заключающийся в регистрации напряжений измерительной Uiz и питающей Upt диагоналей мостовой измерительной цепи и значений величин X1…Xn, зависящих от дестабилизирующих факторов, при установленных контрольных значениях эталонных давления Pэ, температуры, дестабилизирующих факторов, и записи вектор-столбцов Uiz, Upt, X1…Xn в постоянное запоминающее устройство датчика для установления соотношения между выходным сигналом датчика и значениями давления Pi, соответствующими значениям величин, воспроизводимых при эталоном давлении Pэ, отличающийся тем, что на основе значений Pэ, Uiz, Upt, X1…Xn в контрольных точках вычисляют и записывают в постоянное запоминающее устройство датчика вектор-столбец W, который рассчитывают по формуле
W=g-1×P,
где P - вектор-столбец эталонных значений давления в контрольных точках; g - матрица, элементы которой определяются в зависимости от количества переменных функции преобразования; g-1 - матрица, обратная к g.
3. Датчик давления на основе НиМЭМС, реализующий способ измерения, калибровки по п.1 или 2, содержащий тензорезисторный преобразователь давления (ТПД) в виде НиМЭМС, аналого-цифровой преобразователь (АЦП), вычислительное устройство (ВУ), содержащее блок преобразования кода АЦП в численное значение напряжения и блок расчета численного значения давления, постоянное запоминающее устройство (ПЗУ), цифровой интерфейс (ЦИ), причем первый вход АЦП подключен к питающей диагонали мостовой измерительной цепи ТПД, второй вход АЦП подключен к измерительной диагонали мостовой измерительной цепи ТПД, выходы АЦП соединены со входами ВУ, (N+1)-й вход которого соединен с ПЗУ, а выход соединен с ЦИ, отличающийся тем, что дополнительно введены сенсоры, чувствительные к дестабилизирующим факторам, влияющим на датчик давления, выходы которых являются выходами с 3 по N ТПД, при этом эти выходы подключены к входам с 3 по N АЦП, выходы последнего соединены с входами блока преобразования кода АЦП в численное значение напряжения, выходы которого соединены с входами с 1 по N блока расчета численного значения давления, (N+1)-й вход которого соединен с ПЗУ, а выход является выходом ВУ, при этом в блоке расчета численного значения давления измеренное давление Pi определяется по формуле Pi=GT×W, где GT - транспонированный вектор-столбец G, элементы которого определены в зависимости от количества переменных функции преобразования (числа N); символ «×» обозначает матричное произведение, a W - вектор-столбец, элементы которого определены по формуле W=g-1×P, где P - вектор-столбец эталонных значений давления в контрольных точках; g - матрица, элементы которой определены в зависимости от количества переменных функции преобразования (числа N); g-1 - матрица, обратная к g.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2005 |
|
RU2300745C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И СПОСОБ ПОДГОТОВКИ ЕГО К РАБОТЕ | 2008 |
|
RU2384824C1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2400711C1 |
| Приспособление к подъемному механизму для захватывания болванок | 1929 |
|
SU19324A1 |
| ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1995 |
|
RU2082129C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2007 |
|
RU2349886C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2001 |
|
RU2196970C2 |
| WO 1982003121 A1, 16.09.1982 | |||
| US 6243077 B1, 05.06.2001 | |||
| А.Н | |||
| Катков | |||
| МЕТОДИКА МОДЕЛЬНО-УПРАВЛЯЕМОГО ПРОЕКТИРОВАНИЯ ЦИФРОВЫХ ДАТЧИКОВ // ИЗВЕСТИЯ ЮФУ | |||
| ТЕХНИЧЕСКИЕ НАУКИ, № 5 (118), 2011 г (стр.97, фиг.2) | |||
| CN 201387366 Y, 20.01.2010. | |||

