Изобретение относится к области вооружения и военной техники, в частности к защите объектов от средств воздушного нападения, например, с помощью пулеметных (пушечных) установок.
Известен способ защиты боевой машины, заключающийся в обнаружении и опознавании цели, визуальном определении скорости, ракурса и дальности до цели, выборе точки визирования на кольцах сетки прицела в соответствии с ракурсной скоростью цели, стрельбе по воздушной цели [1].
Известна подсистема защиты боевой машины от средств воздушного нападения, включающая коллиматорный прицел наводчика, механизм наведения, крупнокалиберные зенитные пулеметы [1].
Недостатком вышеприведенного способа и реализующей его подсистемы является низкая эффективность стрельбы по воздушным целям, обусловленная большими погрешностями глазомерного способа определения дальности до цели и ракурсной скорости цели.
Известен способ защиты самолетов-бомбардировщиков от атакующих целей, заключающийся в поиске (обнаружении), захвате целей на сопровождение, сопровождении цели прицельно-навигационной системой с выдачей необходимых параметров в бортовой вычислитель, определении угловых поправок стрельбы с отработкой их силовым приводом пулеметной (пушечной) установки (ПУ) и стрельбе по цели [2].
Недостатком приведенного способа является сложность прицельного алгоритма, представляющего собой систему восьми нелинейных уравнений, что приводит к трудностям (или даже невозможности) реализации его даже на современных бортовых цифровых вычислительных машинах (ЦВМ). Предлагаемые там же [2] упрощенные зависимости прицельного алгоритма, предназначенные для реализации на аналоговых вычислителях, вносят большие методические ошибки.
Другим существенным недостатком, возникающим при решении вышеописанной системы нелинейных уравнений, является влияние и взаимовлияние каналов (следящих систем).
Известен способ защиты от средств воздушного нападения, заключающийся в поиске и обнаружении целей, взятии их на сопровождение, сопровождении и определении угловых поправок стрельбы, стрельбе с учетом их по цели [3].
Известна система огневой защиты, которая содержит обзорно-прицельную, навигационную системы, бортовую вычислительную систему, определяющую угловые поправки стрельбы, силовые приводы установки, пулеметную (пушечную) установку [3].
Однако допущения, сделанные при выводе прицельного алгоритма, приводят к большим систематическим ошибкам в выработке упреждений, а следовательно, и к значительному снижению эффективности стрельбы по средствам воздушного нападения.
Наиболее близким к изобретению является способ защиты объекта, заключающийся в обнаружении и опознавании цели, взятии ее на сопровождение, сопровождении и определении угловых поправок стрельбы, стрельбе пушечной установки с учетом их по цели, определении скорости сближения цели с носителем 

где V0 - относительная начальная скорость снаряда, м/с, Vн - скорость носителя, м/с, β - угол визирования цели в горизонтальной плоскости в связанной с носителем системе координат, рад, ε - угол визирования цели в вертикальной плоскости в связанной с носителем системе координат, рад, нахождении времени полета снаряда tпол из соотношения:
где g1(CH Dy,V01) - табличная функция, учитывающая сопротивления воздуха при определении t; CH=cH(H) - приведенный баллистический коэффициент, С - баллистический коэффициент снаряда, м2/кгс, Н(Н) - относительная плотность воздуха, б/р, нахождении упрежденной дальности из соотношения:
где Dy - упрежденная дальность, D - текущая дальность до цели, м, 


где Δβ - угол упреждения на движение цели и носителя в горизонтальной плоскости прицельной системы координат XДYДZД, рад, Δε - угол упреждения на движение цели и носителя в вертикальной плоскости прицельной системы координат XДYДZД, рад, и в соответствии с вычисленными угловыми поправками во время стрельбы ствол пушечной установки постоянно отклоняют относительно текущего положения линии визирования [4].
Наиболее близким к изобретению является система защиты объекта от средств воздушного нападения, которая содержит обзорно-прицельную, навигационную системы, бортовую вычислительную систему, силовые приводы установки, пулеметную (пушечную) установку, при этом бортовая вычислительная система содержит устройство определения углов упреждения, которое состоит из блока формирования угла упреждения Δβ, блока формирования угла упреждения Δε, а также блок формирования упрежденной дальности, блок формирования полетного времени, блок формирования абсолютной начальной скорости, блок формирования скорости сближения [4].
Недостатком данного способа и устройства является недостаточная точность прицеливания, так как при формировании углов упреждения для стволов оружия используются данные о начальной и абсолютной начальной скорости без учета износа канала ствола оружия.
Техническим результатом изобретения является повышение точности прицеливания.
Технический результат изобретения достигается тем, что в способе защиты объекта, заключающемся в обнаружении и опознавании цели, взятии ее на сопровождение, сопровождении и определении угловых поправок стрельбы, стрельбе пушечной установки с учетом их по цели, определении скорости сближения цели с носителем, вычисление абсолютной начальной скорости снаряда из соотношения:

где V0 - относительная начальная скорость снаряда, м/с, Vн - скорость носителя, м/с, β - угол визирования цели в горизонтальной плоскости в связанной с носителем системе координат, рад, ε - угол визирования цели в вертикальной плоскости в связанной с носителем системе координат, рад, нахождении времени полета снаряда tпол из соотношения:
где g1(CH Dy,V01) - табличная функция, учитывающая сопротивления воздуха при определении t; CH=cH(H) - приведенный баллистический коэффициент, С - баллистический коэффициент снаряда, м /кгс, Н(Н) - относительная плотность воздуха, б/р, нахождении упрежденной дальности из соотношения:
где Dy - упрежденная дальность, D - текущая дальность до цели, м,


где Δβ - угол упреждения на движение цели и носителя в горизонтальной плоскости прицельной системы координат XДYДZД, рад, Δε - угол упреждения на движение цели и носителя в вертикальной плоскости прицельной системы координат XДYДZД, рад, и в соответствии с вычисленными угловыми поправками во время стрельбы ствол пушечной установки постоянно отклоняют относительно текущего положения линии визирования.
Для реализации способа в систему защиты объекта от средств воздушного нападения, содержащую обзорно-прицельную, навигационную системы, бортовую вычислительную систему, силовые приводы установки, пулеметную (пушечную) установку, при этом выходы обзорно-прицельной системы и навигационной системы соединены соответственно с первой и второй группой входов бортовой вычислительной системы, первый и второй выходы которой соединены с силовыми приводами установки, выходы которых соединены с пушечной установкой, дополнительно введены первый и второй датчики, блок определения начальной скорости снаряда, причем выходы датчиков соединены с первым и вторым входами блока определения начальной скорости, выход которого соединены третьим входом бортовой вычислительной системы.
Кроме того, бортовая вычислительная система определяет углы Δβ, Δε упреждения стволов оружия в соответствии с выражением


где D - текущая дальность до цели, м; Dy - упрежденная дальность, м; 
осуществляет реализацию алгоритма формирования полетного времени tпол в соответствии с выражением
где g1(CH Dy,V01) - табличная функция, учитывающая сопротивления воздуха при определении t; CH=cH(H) - приведенный баллистический коэффициент, С - баллистический коэффициент снаряда, м2/кгс, Н(Н) - относительная плотность воздуха, б/р, осуществляет реализацию алгоритма формирования абсолютной начальной скорости V01 в соответствии с выражением

где V0 - относительная начальная скорость снаряда, м/с; Vн - скорость объекта защиты, м/с; β - угол визирования цели в горизонтальной плоскости в связанной с системой координат объекта защиты, рад; ε - угол визирования цели в вертикальной плоскости в связанной системой координат объекта защиты, рад, и осуществляет реализацию алгоритма формирования скорости 
где D1, D2 - значения измерительной дальности в моменты времени t2, t2, Δt - интервал времени между замерами.
Кроме того, блок определения начальной скорости снаряда, содержит дифференцирующую цепь, генератор импульсов, сдвиговый регистр, элемент НЕ, элемент И, первый и второй счетчики импульсов, задатчик сигналов, делитель, блок памяти, при этом первый, второй и третий входы блока определения начальной скорости снаряда являются соответственно первым входом сдвигового регистра, элемента НЕ, и входом дифференцирующей цепи, выход которой соединен со вторыми входами сдвигового регистра, первого и второго счетчиков, а третий вход сдвигового регистра соединен с выходом генератора импульсов, выход сдвигового регистра соединен с первыми входами первого счетчика и элемента И, второй и третий входы которого соединены соответственно с выходом элемента НЕ и выходом генератора импульсов, а выход элемента И соединен с первым входом второго счетчика, выход которого соединен с первым входом делителя, второй вход которого соединен с выходом задатчика сигналов, а выход делителя соединен с первым входом блока памяти, второй вход которого соединен с выходом первого счетчика, выход блока памяти является выходом блока определения начальной скорости снаряда.
На фиг.1 показана ориентация визирной системы координат XDYDZD и системы координат, связанной с подвижной артиллерийской установкой 
С.к. XHYHZH связана с системой сопровождения цели (визирным устройством). Ось OXD направлена по линии дальности. С.к XDYDZD образуется из с.к. XHYHZH двумя поворотами: а) вокруг оси OYH на угол β в плоскости башни; б) вокруг оси OZD в плоскости, перпендикулярной к плоскости башни на угол ε.
С.к. 

С.к. 
а) вокруг оси вращения, параллельной оси OYH носителя на угол β/=β+Δβ; б) вокруг оси 
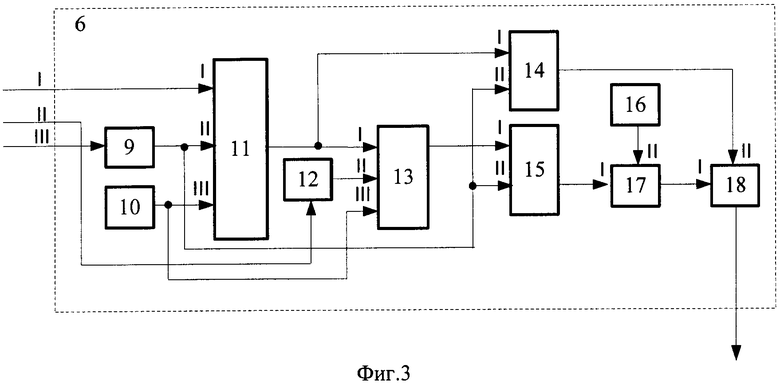
На фиг.2 представлена функциональная схема системы защиты объекта. На фиг.3 приведена структурная схема блока определения начальной скорости снаряда.
Система защиты объекта от средств воздушно-космического нападения содержит, обзорно-прицельную 1, навигационную 2, бортовую вычислительную 3 системы, первый 4 и второй 5 датчики, блок 6 определения начальной скорости снаряда, силовые приводы 7 установки, пулеметную (пушечную) 8установку, при этом выходы обзорно-прицельной 1 и навигационной 2 систем соединены соответственно с первой и второй группой входов бортовой 3 вычислительной системы, первый и второй выходы которой соединены с силовыми приводами 7 установки, выходы которых соединены с пушечной 8 установкой, выходы первого 3 и второго 4 датчиков соединены с первым и вторым входами блока 6 определения начальной скорости, выход которого соединены третьим входом бортовой вычислительной 3 системы.
Блок 6 определения начальной скорости снаряда, содержит дифференцирующую цепь 9, генератор 10 импульсов, сдвиговый регистр 11, элемент НЕ 12, элемент И 13, первый 14 и второй 15 счетчики импульсов, задатчик 16 сигналов, делитель 17, блок 18 памяти, при этом первый, второй и третий входы блока 6 определения начальной скорости снаряда являются соответственно первым входом сдвигового регистра 11, элемента НЕ 12, и входом дифференцирующей цепи 9, выход которой соединен со вторыми входами сдвигового регистра 11, первого 14 и второго 15 счетчиков, а третий вход сдвигового регистра 11 соединен с выходом генератора 10 импульсов, выход сдвигового регистра 11 соединен с первыми входами первого 14 счетчика и элемента И 13, второй и третий входы которого соединены соответственно с выходом элемента НЕ 12 и выходом генератора 10 импульсов, а выход элемента И 13 соединен с первым входом второго 15 счетчика, выход которого соединен с первым входом делителя 17, второй вход которого соединен с выходом задатчика 16 сигналов, а выход делителя 17 соединен с первым входом блока памяти 18, второй вход которого соединен с выходом первого 14 счетчика, выход блока 18 памяти является выходом блока 6 определения начальной скорости снаряда.
Система защиты объекта работает следующим образом.
В момент обнаружения и опознавания подлетающей цели к объекту защиты, обеспечивается взятии ее на сопровождение, сопровождении.
При этом с выходов обзорно-прицельной системы поступают сигналы соответствующие значениям углов визирования цели в горизонтальной и вертикальной плоскости β и ε и ωYA ωZA на первую группу входов бортовой вычислительной системы.
С выходов навигационной системы сигналы о скорости движения носителя Vн, плотности воздуха и другие поступают на вторую группу входов бортовой вычислительной системы (фиг.2).
Бортовая вычислительная система осуществляет реализацию алгоритма формирования абсолютной начальной скорости V01 в соответствии с выражением

где V0 - относительная начальная скорость снаряда, м/с; Vн - скорость объекта защиты, м/с; β - угол визирования цели в горизонтальной плоскости в связанной с системой координат объекта защиты, рад; ε - угол визирования цели в вертикальной плоскости в связанной с системой координат объекта защиты, рад.
Начальная скорость снаряда определяется блоком определения начальной скорости снаряда следующим образом (фиг 3).
В момент начала стрельбы при включении питания обеспечивается подготовка блока 6 определения начальной скорости снаряда к измерению. При этом от источника питания происходить обнуление сдвигового регистра 11, и первого 14 и второго 15 счетчиков, входящих в состав блока 6 определения начальной скорости снаряда по следующей цепи, источник питания через дифференцирующую цепь 9 на вторые входы сдвигового регистра 11, первого 14 и второго 15 счетчиков.
Во время стрельбы зенитной пушки на выходах датчиках (4, 5) закрепленных на выходах канала ствола возникают сигналы, которые поступают последовательно на первый и второй входы блока 6 определения начальной скорости снаряда. При этом сигналы поступают соответственно на первый вход сдвигового регистра 11 и вход элемента НЕ 12, на третий вход сдвигового регистра 11 поступает сигнал с выхода генератора 10 импульсов.
В момент поступления сигнала с выхода первого 4 датчика на первый вход сдвигового регистра 11, с его выхода сигнал поступает на первый входа первого 14 счетчика и элемента И 13, на второй и третий входы которого поступают сигналы соответственно с выхода элемента НЕ 12 и выхода генератора 10 импульсов.
С выхода элемента И 13 сигнал поступает на первый вход второго 15 счетчика, с выхода которого поступает на первый вход делителя 17, на второй вход которого поступает сигнал с выхода задатчика 16 сигналов.
На выходе первого 15 счетчика формируется сигнал соответствующий количеству выстрелов из канала ствола.
С выхода делителя 17 сигнал соответствующий начальной скорости снаряда поступает на первый вход блока 17 памяти, на второй вход которого поступает сигнал соответствующий количеству выстрелов снаряда поступает с выхода первого 14 счетчика, выход блока 18 памяти является выходом блока 6 определения начальной скорости снаряда.
В момент поступления сигнала с выхода второго 5 датчика на вход элемента НЕ 12, сигнал с его выхода и соответственно со второго входа элемента И 13 снимается, тем самым прекращая подсчет импульсов вторым 15 счетчиком.
Таким образом, на выходе блока 18 памяти хранятся сигналы соответствующие количеству произведенных выстрелов и начальной скорости снаряда.
Формирования скорости 
где D1, D2 - значения измерительной дальности в моменты времени t1, t2, при этом Δt - интервал времени между замерами.
Дальность определяется на основе моноимпульсного лазерного дальномера после принятия решения о стрельбе непосредственно перед стрельбой производится двукратный замер дальности D1=D(t1) и D2=D(t2) через некоторый заданный стабильный интервал времени.
Могут быть и другие более сложные варианты определения скорости сближения. Например, при наличии высокочастотного дальномер 
Бортовая вычислительная 3 система объекта осуществляет формирования упрежденной дальности Ду в соответствии с выражением:

при этом формирования полетного времени tпол осуществляется в соответствии с выражением
где g1(CHDy,V01) - табличная функция, учитывающая сопротивления воздуха при определении t; CH=cH(H) - приведенный баллистический коэффициент, C - баллистический коэффициент снаряда, м2/кгс, H(H) относительная плотность воздуха, б/р.
Последовательность формирования упрежденной дальности Dy осуществляется следующим образом. По нулевому начальному значению упрежденной дальности 
которое поступает на вход алгоритма формирования полетного времени tпол вместе со значением абсолютной начальной скорости V01 с выхода алгоритма формирования абсолютной начальной скорости снаряда а также относительной плотности воздуха Н(Н) и т.п. Вычисляется первое значение полетного времени 

Итерации продолжаются до тех пор, пока модуль разности двух последовательных приближений Dy не будет менее заданной малой величины ε. При выполнении условия 
На основе полученных значений упрежденной дальности, времени полета снаряда, начальной и абсолютной начальной скорости снаряда, скорости сближения средств воздушного нападения и объекта защиты происходит определении угловых поправок стрельбы и стрельба пушечной установки с учетом их по цели.
Бортовая вычислительная 3 система определяет углы Δβ, Δε упреждения стволов оружия в соответствии с выражением


где D - текущая дальность до цели, м; Dy - упрежденная дальность, м; 
Далее комбинация выработанных поправок по каждому из каналов поступает на вход силового 7 привода.
Силовой 7 привод, обрабатывая управляющие сигналы с учетом сигнала обратной связи, в каждый момент времени разворачивают стволы пушечной 8 установки в нужном направлении.
Использование заявляемого способа и реализующей его системы обеспечит повышение точности стрельбы и отсюда эффективности зенитного огня по воздушным целям при защите объекта, на основе использования фактических данных о начальной скорости снаряда, при формировании углов упреждения стволов оружия.
Источники информации
1. Теория стрельбы из танков / Под ред. Н.И. Романова. - М.: Академия бронетанковых войск им. маршала Малиновского Р.Я., 1973, с.315-328.
2. Мубарашкин Р.В. и др. Прицельные системы стрельбы, ч.1. - М.: ВВИА им. проф. Н.Е. Жуковского, 1973, с.78-90, 96, 97.
3. Преснухин Л.Н. и др. Основы теории и проектирования приборов управления. - М.: Оборонгиз, 1960, с.200, 201.
4. Способ защиты боевой машины от средств воздушного нападения и система для его осуществления. Патент РФ на изобретение №2087832, Заявка №95100709/02, опубл. 17.01.1995 г., патент опубл. 20.08.1997 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО СКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2003 |
|
RU2247298C1 |
| СПОСОБ ЗАЩИТЫ БОЕВОЙ МАШИНЫ ОТ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087832C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ХАРАКТЕРИСТИК СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2515580C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА КАНАЛА СТВОЛА АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2012 |
|
RU2494368C1 |
| СПОСОБ ОПЕРАТИВНОЙ ОЦЕНКИ ЭФФЕКТИВНОСТИ ПОРАЖАЮЩЕГО ДЕЙСТВИЯ БОЕПРИПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442104C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2243483C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК РАССЕИВАНИЯ СНАРЯДОВ ПРИ СТРЕЛЬБЕ ИЗ АРТИЛЛЕРИЙСКОГО ОРУЖИЯ И ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2568271C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПРОЛЕТА СНАРЯДОВ ОТНОСИТЕЛЬНО ЦЕНТРА МИШЕНИ ПРИ СТРЕЛЬБЕ ИЗ АРТИЛЛЕРИЙСКОГО ОРУЖИЯ И ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572370C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА СТВОЛОВ МНОГОСТВОЛЬНЫХ ПУШЕК АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2012 |
|
RU2494369C1 |
| СПОСОБ ОЦЕНКИ ПРОБИВНОЙ СПОСОБНОСТИ СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442952C1 |

Изобретение относится к области вооружения и военной техники, в частности к защите объектов от средств воздушного нападения, например, с помощью пулеметных (пушечных) установок. Способ защиты объектов от средств воздушного нападения, включающий обнаружение и опознавание целей, взятие их на сопровождение, сопровождение, определение скорости сближения цели с объектом защиты, вычисление абсолютной начальной скорости снаряда, вычисление упрежденной дальности, определение начальной скорости снаряда и абсолютной начальной скорости снаряда с учетом износа канала ствола, вычисление углов упреждения и на движение цели и объекта защиты соответственно в вертикальной и горизонтальной плоскостях прицельной системы координат, изменение положения стволов оружия относительно текущего положения линии визирования с учетом фактического значения начальной и абсолютной начальной скорости снаряда, учитывающего износ канала ствола оружия. Система защиты объектов от средств воздушного нападения содержит обзорно-прицельную, навигационную систему, бортовую вычислительную систему, силовые приводы установки, пулеметную или пушечную установку, первый и второй датчики, закрепленные на канале ствола, блок определения начальной скорости снаряда и определенную комбинацию связей между элементами системы. Технический результат заключается в повышении точности прицеливания. 2 н. и 2 з.п. ф-лы, 3 ил.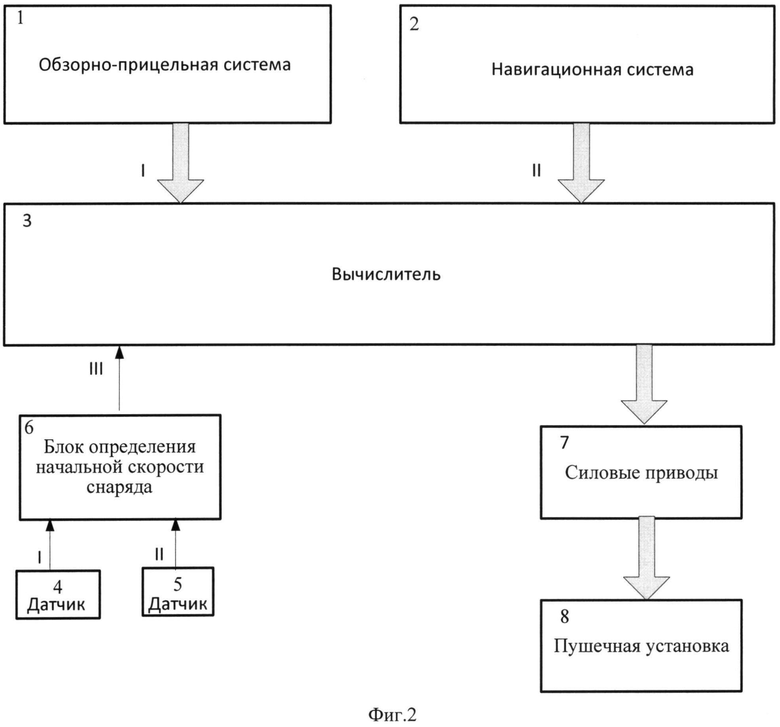
1. Способ защиты объектов от средств воздушного нападения, включающий обнаружение и опознавание целей, взятие их на сопровождение, сопровождение, определение скорости 

где V0 - относительная начальная скорость снаряда, м/с; VН - скорость перемещения объекта защиты, м/с; β - угол визирования цели в горизонтальной плоскости в связанной с объектом защиты системе координат, рад; ε - угол визирования цели в вертикальной плоскости в связанной с объектом защиты системе координат, рад, нахождение времени полета снаряда tпол из соотношения:
где g1(CHDy, V01) - табличная функция, учитывающая сопротивления воздуха при определении t; CH=cH(H) - приведенный баллистический коэффициент, C - баллистический коэффициент снаряда, м2/кгс, H(H) - относительная плотность воздуха, б/р, нахождение упрежденной дальности из соотношения:
где D - текущая дальность до цели, м; Dy - упрежденная дальность, м; 


где Δβ - угол упреждения на движение цели и носителя в горизонтальной плоскости прицельной системы координат XДYДZД, рад, Δε - угол упреждения на движение цели и носителя в вертикальной плоскости прицельной системы координат XДYДZД, рад, и в соответствии с вычисленными угловыми поправками во время стрельбы ствол пушечной установки постоянно отклоняют относительно текущего положения линии визирования.
2. Система защиты объектов от средств воздушного нападения содержит обзорно-прицельную, навигационную систему, бортовую вычислительную систему, силовые приводы установки, пулеметную или пушечную установку, причем выходы обзорно-прицельной и навигационной системы соединены с входами бортовой вычислительной системы, выход которой соединен с входами силовых приводов установки, выходы которых соединены с входами пулеметной или пушечной установки, отличающаяся тем, что дополнительно введены первый и второй датчики, блок определения начальной скорости снаряда, при этом первый и второй датчики размещены на стволе или непосредственной близости от ствола, выходы датчиков соединены с первым и вторым входом блока определения начальной скорости снаряда, третий вход которого соединен с источником питания, а выход блока определения начальной скорости снаряда соединен с третьим входом бортовой вычислительной системы.
3. Система по п.2, отличающаяся тем, что бортовая вычислительная система определяет углы Δβ, Δε упреждения стволов оружия в соответствии с выражением

где D - текущая дальность до цели, м; Dy - упрежденная дальность, м; 
осуществляет реализацию алгоритма формирования полетного времени tпол в соответствии с выражением
где g1(CHDy,V01) - табличная функция, учитывающая сопротивления воздуха при определении t; CH=cH(H) - приведенный баллистический коэффициент, C - баллистический коэффициент снаряда, м2/кгс, H(H) - относительная плотность воздуха, б/р, осуществляет реализацию алгоритма формирования абсолютной начальной скорости V01 в соответствии с выражением

где V0 - относительная начальная скорость снаряда, м/с; Vн - скорость объекта защиты, м/с; β - угол визирования цели в горизонтальной плоскости в связанной с системой координат объекта защиты, рад; ε - угол визирования цели в вертикальной плоскости в связанной системой координат объекта защиты, рад, и осуществляет реализацию алгоритма формирования скорости 
где D1, D2 - значения измерительной дальности в моменты времени t1, t2, Δt - интервал времени между замерами.
4. Система по п.2, отличающаяся тем, что блок определения начальной скорости снаряда содержит дифференцирующую цепь, генератор импульсов, сдвиговый регистр, элемент НЕ, элемент И, первый и второй счетчики импульсов, задатчик сигналов, делитель, блок памяти, при этом первый, второй и третий входы блока определения начальной скорости снаряда являются соответственно первым входом сдвигового регистра, элемента НЕ, и входом дифференцирующей цепи, выход которой соединен со вторыми входами сдвигового регистра, первого и второго счетчиков, а третий вход сдвигового регистра соединен с выходом генератора импульсов, выход сдвигового регистра соединен с первыми входами первого счетчика и элемента И, второй и третий входы которого соединены соответственно с выходом элемента НЕ и выходом генератора импульсов, а выход элемента И соединен с первым входом второго счетчика, выход которого соединен с первым входом делителя, второй вход которого соединен с выходом задатчика сигналов, а выход делителя соединен с первым входом блока памяти, второй вход которого соединен с выходом первого счетчика, выход блока памяти является выходом блока определения начальной скорости снаряда.
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО СКОРОСТНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290594C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2213927C1 |
| УСТАНОВКА ДЛЯ СТРЕЛЬБЫ ПО СКОРОСТНЫМ НИЗКОЛЕТЯЩИМ ЦЕЛЯМ | 2005 |
|
RU2292005C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |

